Goldeneye University of Minnesota University Nanosat 5 PDR Presentation
advertisement

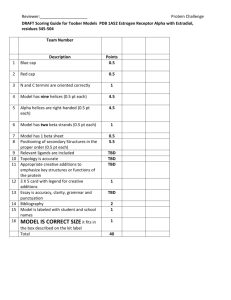
Goldeneye University of Minnesota University Nanosat 5 PDR Presentation August 16th-17th, 2007 Logan, Utah Mission Overview Mission Statement The purpose of Goldeneye is to design, construct and validate a GPS bistatic radar for remote sensing applications onboard small satellites in low Earth orbit. Goldeneye GPS Satellite Mission Objectives • Obtain Earth reflected GPS signals→ • Obtain direct GPS signals • Process acquired data on the ground Earth-reflected GPS signal Technology Demonstration • Multifunctional applications • Advanced science instrumentation and detector/camera technology • Advanced solutions for miniaturized Nanosat subsystems – Innovative GPS receiver/antenna, hardware, and algorithms 2 Mission Details: Bistatic Radar Bistatic Radar : Transmitter is not the receiver as in monostatic radar • Transmitter is the GPS satellite • Receiver is Goldeneye • a is the range between transmitter and receiver • b + ρ is the reflected signal • From the geometry the range, ρ, to the reflection surface can be found By analyzing the reflected signals power, Doppler shift and range variation, information about the reflecting surface can be deduced. The science in this mission is to correlate these reflected signals with known ocean conditions, atmospheric and land conditions thereby exploring this novel application of GPS. Example of Doppler-Shift vs Range Variation from a Reflected GPS Signal. ( S. Gleason, Remote Sensing of Ocean, Ice and Land Surfaces Using Bistatically Scattered GNSS Signals. Ph.D. Thesis. Surrey University. 2006.) 3 RISK Mission Timeline • • Ground: Test payload Integrate with launch vehicle Launch Deploy – – • Charge batteries Activate systems 4 hours 5 min. Attitude Control Maneuvers: · Detumble · Despin about z-axis · Point GPS high gain antenna towards earth TBD Verify systems 15 min. • Attitude Control Mode Baseline Mode 6 hours* *Maximum time needed to completely recharge batteries while operating baseline components TBD Transmit Data Mode 10 min. Experiment Mode 36 sec. • Collects GPS data Compresses GPS data Stores GPS data Transmit Data Mode: – • Detumbles Goldeneye Despins Goldeneye Points GPS high gain antenna towards Earth Experiment Mode: – – – • Continuously runs after startup Includes “life support” systems only Charges batteries Receives messages from ground station Sends health status reports to ground station Attitude Control Mode: – – – Normal Operations Modes (duration - TBD): Automatically enabled Ends when pointing requirements satisfied Baseline Mode: – – – – – Startup (duration - TBD): Inhibits release Baseline mission: duration - TBD Startup: Transmits experiment data to ground station for post processing Extended Operations 4 Program Schedule RISK • Purpose: Ensure project is completed on-time • Objective: Meet and verify requirements 5 Mission Top-Level Details: Remote Sensing with GPS RISK Minimum Success: • Establish Orbit • Acquire direct and reflected GPS signals for at least 36 seconds • Transmit GPS data to ground station • Post-process GPS data • Detect surface conditions on Earth – – Ocean wind speed Wave/tidal height Nominal Success: • Minimum success criteria met • Detect additional surface conditions on Earth – – – Ice surfaces Land features Soil moisture content Another Possibility: • Collect reflected GPS signals from other objects in orbit · · Analysis for the possibility of detecting other objects has been done. Radar cross section of reflecting object must meet certain stringent requirements (specular reflector, larger than 30 cm, etc) 6 Mission Top-Level Details: GPS Navigation Message Figure adapted from, Misra and Enge Global Positioning System:Signals, Measurements and Perfomrance pp. 104, which is based on a figure by Frank van Diggelen 7 Requirements Flow Mission Statement Minimum Success Criteria Mission Objectives Nominal Success Criteria Mission Requirements System Requirements Goldeneye Requirements Ground Station Requirements Ground Support Equipment Requirements Subsystem Requirements: · Bistatic Radar · Attitude Determination and Control · Navigation · Flight Computing · Communications · Power · Structure · Thermal Control 8 Mission Requirements Requirement Source Verification Source Document Test/Analysis Number M-1 Must meet all NS-5 requirements MS TBD TBD M-2 Must be able to collect GPS signals O-1, O-2 TBD TBD M-3 Must be able to transmit data to ground station O-1, O-2 TBD TBD M-4 Must be able to receive data at ground station O-1, O-2 TBD TBD M-5 Must be able to process data on the ground O-3 TBD TBD M-6 Must be able to design, fabricate and test Goldeneye on the ground MS TBD TBD Three systems to accomplish the mission: Goldeneye Collects and Transmits Data Ground Station Receives Goldeneye’s Data Ground Support Processes Goldeneye’s Data Mission Accomplished! 9 System 1 Overview: Goldeneye RISK The purpose of Goldeneye is to validate a GPS bistatic radar for remote sensing applications onboard small satellites in low Earth orbit. Attitude Determination and Control: Orients Goldeneye to collect experimental data – Determines Goldeneye’s attitude – Detumbles and Despins Goldeneye – Points GPS high gain antenna towards Earth using magnetic torquers with +/- 20 accuracy – Assists magnetic torquers by providing gravity gradient stabilization through Goldeneye’s moments of intertia Data Collection, Storage, and Compression: Acquires experimental data – Collects raw, Earth-reflected GPS signals for 36 seconds – Collects processed data from direct GPS signals for 36 seconds – Compresses GPS data – Stores GPS data Transmitting to Ground Station: Allows validation of experimental data – Listens for transmission window and sends stored GPS data to ground station – Validation of the GPS bistatic radar is achieved through processing the GPS data with our own algorithms and correlating the processed data with actual ocean surface conditions 10 System 1 Requirements: Goldeneye Requirement Source Verification Source Document Test/Analysis Number GS-1 Must be able to operate in Earth orbit M-1 TBD TBD GS-2 Must have onboard power supply M-1 TBD TBD GS-3 Must start-up autonomously after deployment M-1 TBD TBD GS-4 Must be able to determine attitude O-1 TBD TBD GS-5 Must be able to control attitude O-1 TBD TBD GS-6 Must be able to determine position and velocity O-2 TBD TBD GS-7 Must be able to collect, store, and compress data O-3 TBD TBD GS-8 Must be able to receive transmissions from the ground station O-3 TBD TBD GS-9 Must be able to transmit data to ground station O-3 TBD TBD 11 System 1 Design Overview: Goldeneye RISK Goldeneye has 8 subsystems for supporting the bistatic radar mission: Bistatic Radar System (BRS) – direct signal GPS antenna, high gain left-hand polarized GPS antenna, GPS receiver and GPS RF front end collector Attitude Determination and Control System (ADCS) – magnetometer, rate gyro, active magnetic control Navigation System (NAV) – direct signal GPS antenna and GPS receiver Flight Computing System (FCS) – embedded computer, data compression and storage Communications System (COMM) – amateur packet radio system with built-in TNC Power System (PWR) – body-mounted solar cells, inhibits, UNP-recommended NiCd battery design, DC-DC conversion, mission mode control Structure System (STR) – aluminum isogrid panels, solid aluminum component boxes, electrically conductive coatings, vent holes Thermal Control System (THRM) – Heaters, heat sinks 12 Requirements: Bistatic Radar System (BRS) Requirement Source Verification Test/ Source Analysis Document Number BRS-1 Must accept incoming GPS signals M-2 TBD TBD BRS-1.1 Requires one GN3S Sampler from SiGe. BRS-1 TBD TBD BRS-1.2 Requires one nadir aligned high gain LHCP antenna capable of receiving signals at 1575MHz (L1 signal). BRS-1 TBD TBD BRS-1.3 Requires GN3S software for reflected signal collection. BRS-1 TBD TBD BRS-1.4 Requires one Novatel OEMV-3G GPS receiver. BRS-1 TBD TBD BRS-1.5 Requires one RHCP antenna with boresight aligned to GPS satellites capable of receiving signals at 1575MHz (L1 signal). BRS-1 TBD TBD BRS-2 Must determine Earth surface conditions NSC-1 TBD TBD BRS-2.1 Requires communication with flight computer. BRS-2 TBD TBD BRS-2.2 Requires software GPS receiver (“Q”). BRS-2 TBD TBD BRS-2.3 Requires MatLab software to process “Q” output. BRS-2 TBD TBD BRS-3 Must validate experimental results. NSC-1 TBD TBD BRS-3.1 Requires NOAA National Data Buoy Center data for dates and times of reflected GPS signal data. BRS-3 TBD TBD 13 Design: Bistatic Radar System (BRS) Antenna Configuration GPS Direct Signal Antenna · Collects direct GPS signals from GPS satellites GPS High Gain Antenna · Nadir Pointing · Collects Earthreflected GPS signals 14 RISK Design: Bistatic Radar System (BRS) Direct GPS Signal Antenna Legend San Jose Navigation, SA-60C Passive GPS Antenna HW HW SW PWR Hardware Software - Data Flow MMCX 4.5 to 18 V, Expect 5V - - Power 5V HW Novatel OEMV-3G GPS Receiver Processed GPS Signal RS-232 or USB HW Flight Computer TBD: Windows XPe PC/104 Footprint Model TBD 2.7V to 3.3V, Self Regulated HW SiGe SE4110L GN3S Sampler Raw Reflected GPS Signal Data Compression Routine SW MCX TBD, Self Regulated USB USB If Active Antenna HW HW High Gain Reflected GPS Signal Antenna: Nadir Pointing TBD Onboard Flash Storage TBD: USB Hub w/ multiple 2 gig USB Flash drives 15 Data: Bistatic Radar System (BRS) Mission Objective #3: Must be able to transmit data to ground station BRS Data: • 36 seconds of data is 640 Mb (minimum success criteria) • 134.4 Mb after compression • 234 Minutes required to transmit 36 seconds of data to ground 16 Requirements: Attitude Determination and Control System (ADCS) Requirement Source Verification Test/ Source Analysis Document Number ADCS-1 Must provide on-orbit Goldeneye attitude data GS-4, GS-5 TBD TBD ADCS-1.1 Must utilize a rate gyro ADCS-1 TBD TBD ADCS-1.2 Must utilize a three-axis magnetometer ADCS-1 TBD TBD ADCS-2 Must detumble Goldeneye on orbit GS-4, TBD GS-5, GS-7 TBD ADCS-3 Must despin Goldeneye about z-axis GS-4, TBD GS-5, GS-7 TBD ADCS-4 Must provide on-orbit directional control with a nadirfacing pointing accuracy of +/- 20 degrees GS-4, TBD GS-5, GS-7 TBD ADCS-4.1 Must provide passive directional control with gravity gradient stabilization ADCS-4 TBD TBD 17 Design: Attitude Determination and Control System (ADCS) RISK Objective: Maneuver from a measured attitude to a desired attitude that will allow Goldeneye to perform the bistatic radar experiment. Desired Attitude Attitude Control System Computed Attitude Attitude Control Algorithms Actuation: Magnetic Torquers Attitude Determination Algorithms Attitude Sensors: Rate Gyro and Magnetometer Attitude Determination System Goldeneye Attitude 18 Design: Attitude Determination and Control System (ADCS) Attitude Determination: • Blend of magnetometer triad and rate gyro measurements Attitude Control: • Active control through magnetic torquers • Passive control through gravity gradient stabilization (no boom) Control Tasks: • Detumble Goldeneye • Despin Goldeneye • Keep high gain antenna pointed towards Earth with +/- 20 degrees accuracy Dynamic Stability: • Moment of inertia analysis for gravity gradient stabilization • Minimizes control authority required by magnetic torquers Always pointed towards Earth 19 Design: Attitude Determination and Control System (ADCS) Attitude Determination • Legacy design from Nanosat-4 • Attitude determination algorithm has already been validated – Algorithm validated by using post processed space flight sensor data from the NASA/Stanford Gravity Probe B mission. – Subject of the following journal manuscript in preparation: • V. L. Bageshwar, D. Gebre-Egziabher, W. L. Garrard, P. Shestople, and M. Adams, “Inertially Aided Vector Matching Algorithm for Satellite Attitude Determination" 20 Design: Attitude Determination and Control System (ADCS) Attitude Control • • • • Algorithms for detumbling Algorithms for despinning Algorithms for nadir pointing Moments of inertia for gravity gradient stabilization: Inside Goldeneye (Bottom Surface) Z 5 Boxes Goldeneye Y Y Lightband – I_roll > I_yaw , Therefore I_xx > I_yy > I_zz X X Curtis, Howard D. Orbital Mechanics for Engineers. Elsevier. 2005. Massachusetts. Page 539. 21 Design: Attitude Determination and Control System (ADCS) • Magnetometer: Goodrich FM02 – – – – • Rate Gyro: Honeywell HG1700 – – – – – • Measures magnetic field vector of Earth 43 grams 0.33 Watts Acquired www.goodrich.com Measures angular velocities about x, y, and z axes 726 grams 5.5 Watts 2 deg/hr drift Acquired Magnetic Torquers: TBD www.honeywell.com 22 Requirements: Navigation System (NAV) Requirement Source Verification Test/ Source Analysis Document Number Must determine position and velocity in orbit. GS-6 TBD TBD NAV-1 TBD TBD NAV-1.2 Requires RHCP antenna capable of receiving NAV-1 signals at 1575MHz (L1 signal). TBD TBD NAV-1.3 Requires transmission to FCS for logging of x, y, z (position) and x-dot, y-dot, z-dot (velocity) on orbit. TBD TBD NAV-1 NAV-1.1 Requires Novatel OEMV-3G GPS receiver. NAV-1 23 Design: Navigation System (NAV) RISK Using GPS to determine position and velocity Antenna: • San Jose Navigation SA-60C • 0.06 Watts • Located on top outer surface of Goldeneye Receiver: • Novatel OEMV-3G • 2 Watts • Housed in a component box www.sanav.com 24 Design: Navigation System (NAV) Direct GPS Signal Antenna HW San Jose Navigation, SA-60C Passive GPS Antenna Legacy design from Nanosat-4 PWR MMCX 4.5 to 18 V, Expect 5V 5V HW Novatel OEMV-3G GPS Receiver Processed GPS Signal RS-232 or USB X, Y, Z X-dot, Y-dot, Z-dot HW Flight Computer TBD: Windows XPe PC/104 Footprint Model TBD Data Compression Routine Legend HW SW - TBD, Self Regulated USB SW Hardware Software - Data Flow - Power HW Onboard Flash Storage TBD: USB Hub w/ multiple 2 gig USB Flash drives 25 Requirements: Flight Computing System (FCS) Requirement Source Verification Test/ Source Analysis Document Number FCS-1 Must collect all sensor data GS-7 TBD TBD FCS-2 Must compress data for storage GS-7 TBD TBD FCS-3 Must store collected data onboard GS-7 TBD TBD FCS-4 Must determine attitude GS-4 TBD TBD FCS-5 Must control attitude GS-5 TBD TBD FCS-6 Must decide when to turn on bistatic radar experiment GS-7 TBD TBD FCS-7 Must be able to communicate with Communication System GS-9 TBD TBD 26 Design: Flight Computing System (FCS) RISK Hardware/Software: • Arcom PC-104 embedded computer – – – – – – – • 1.6 Watts 95 grams 400 MHz processor 5 serial ports, RS232 2 USB ports Programming language: C Acquired with Linux, looking for another that supports Windows for the GPS RF front end Interface Software Flash memory – 2 Gb required • Software data management and test plan – Account for all I/O – Account for all processes associated with the I/O – Computing Budget 27 Design: Flight Computing System (FCS) Power Switches Heaters Power Manager Current Sensors Temp Sensors Data Storage Device Voltage Sensors Bi-static Radar System USB 1.1 RS232 COM4 Flight Computing System USB 1.1 RS232 COM1 Primary Radio Magnetometer RS232 COM3 RS232 COM2 Rate Gyro Navigation and ADCS Torque Coils GPS Reciever Backup Radio 28 Requirements: Communication System (COMM) Requirement Source Verification Test/ Source Analysis Document Number COMM-1 Must abide by applicable FCC regulations M-1 TBD TBD COMM-2 Must have inhibits preventing RF emissions before deployment M-1 TBD TBD COMM-3 Must be able to communicate with Ground Station during transmission windows GS-8, GS-9 TBD TBD COMM-4 Must be able to communicate with Flight Computing System GS-9 TBD TBD 29 Design: Communications System (COMM) RISK Shown for one radio. 2 Radios: Kenwood TH-D7A Second radio is the same. • Nanosat-4 Legacy Flight • 380g DC Power Computing System • 54.0 x 119.5 x 43.5 mm • 1.65 Watts (receiving) Radio • 26 Watts (transmitting) Transceiver Functional Characteristics: • Modulation: Reactance Antenna • Transmitting power: 5 Watts • Frequency deviation +/- 5kHz Modem Functional Characteristics: • 9.6 kb/s Whip Antenna Whip Antenna, 13.4 inches long, for • 440 MHz (transmitting)/144 MHz (receiving) for receiving. transmitting, 440 MHz • Protocols: AX.25 144 MHz 2 Antennas: Goldeneye • Omnidirectional, nondeployable, on top of Goldeneye • Current height of transmitting antenna causes approx. 14 cm breach of static envelopeLightband considering other options 30 Requirements: Power System (PWR) Requirement Source Verification Source Document Test/ Analysis Number PWR-1 Must have inhibits to prevent start-up before deployment GS-3 TBD TBD PWR-2 Must charge batteries with solar cells GS-2 TBD TBD PWR-3 Must control component activation and deactivation GS-3 TBD TBD PWR-4 Must supply power to components at regulated voltages GS-1 TBD TBD PWR-5 Must supply enough power to support mission MS TBD TBD PWR-6 Must protect components from transients GS-1 TBD TBD PWR-7 Must protect components from overcurrent GS-1 TBD TBD PWR-8 Must prevent batteries from overcharging GS-1 TBD TBD PWR-9 Must mitigate short circuit failures GS-1 TBD TBD PWR-10 Must monitor health GS-1 TBD TBD PWR-10.1 Must monitor bus voltages GS-1 TBD TBD PWR-10.2 Must monitor bus currents GS-1 TBD TBD PWR-10.3 Must monitor component currents GS-1 TBD TBD PWR-10.4 Must monitor component logic states GS-1 TBD TBD PWR-10.5 Must monitor battery voltage GS-1 TBD TBD PWR-10.6 Must receive component box temperature data from thermal control system GS-1 TBD TBD PWR-11 Must transmit health data to flight computer GS-7 TBD TBD 31 Design: Power System (PWR) Solar Cells Batteries Solar Cells: • EMCORE 607094, 192 cells • 28% efficient • Triple junction GaAs • Average power at least 35 Watts Batteries: • 14 Sanyo N-4000DRL cells • Provided by AFRL DC/DC Power Supply Power Manager RISK Satellite Components DC/DC Power Supply: • American power design D150-15/5, 88% efficient, • dual regulated outputs: 5V and 15V Power Manager: • PIC controller • Monitors health of batteries and hardware • Activates/Deactivates components based on health data 32 Design: Power System (PWR) Sun Solar Panel 1 Solar Panel 2 Solar Panel 3 Solar Panel 4 Solar Panel 5 Solar Panel 6 Batteries 15V-Loads 5V-Loads DC/DC Power Supply 5V 15 V Power Sources: · Eclipse: Batteries · Sun: Solar Cells and Batteries 33 Design: Power System (PWR) Components and Circuitry • Heaters • Inhibits • Power Switches • Voltage Monitors • Current Monitors • Temperature Monitors • Load Status Monitors • Transient Protection • Overvoltage Protection • Overcurrent Protection • Short Circuit Protection Telemetry • Battery Voltage • Bus Voltage • Bus Current • Component Current • Load Status • Battery Box Temperature 34 Design: Power System (PWR) > Power Budget 35 Requirements: Structure (STR) Requirement STR-1 to Must comply with Nanosat-5 program STR-23 requirements Source Verification Test/ Source Analysis Document Number M-1 TBD TBD STR-24 Must provide metal components boxes for GS-1 Goldeneye's hardware TBD TBD STR-25 Must have an electrically conductive coating on metal component boxes GS-1 TBD TBD STR-26 Must have moments of inertia such that I_xx > I_yy > I_zz ADCS-4.1 TBD TBD 36 Requirements 1 – 23: Structure (STR) 37 RISK Design: Structure (STR) Aluminum 6061-T6 Panels: • Circular isogrid design • Electrically conductive coating GPS Direct Signal Antenna Solar Panels Lightband Interface GPS High Gain Antenna 38 Design: Structure (STR) Aluminum 6060-T6 Component Boxes: • Housing for hardware • 2-piece design • Electrically conductive coating • 2 vent holes, 0.25” diameter, size based on results of venting analysis 39 S1.7 Design: Structure Structural Analysis Objective: Gain familiarity with ANSYS • Model 1: Confirmation of ANSYS stress deformation results by hand calculation of compressive axial loading of simple rectangular beam. • Model 2: Confirmation of ANSYS stress results by hand calculation of a supported plate under acceleration load. Further Analysis: • Brackets, component boxes, isogrid panels, solar panels, buckling analysis Model 1: Stress at Fixed Base Hand Calculation: s = 706 kPa ANSYS solution: s = 723 kPa 40 Requirements: Thermal Control System (THRM) Requirement Source Verification Test/ Source Analysis Document Number THRM-1 Must maintain proper temperature ranges for components to operate GS-1 TBD TBD THRM-1.1 Must monitor temperature within every component box THRM-1 TBD TBD THRM-1.2 Must transmit temperature data to power manager THRM-1 TBD TBD 41 Design: Thermal Control System (THRM) RISK • Heat sinks for components with 1 Watt power consumption • Heaters for temperature sensitive components • Operating Temperatures: Viper PC-104 computer -20 to 70 degrees Celsius Novatel GPS receiver -40 to 85 degrees Celsius Kenwood TH-D7A radios -20 to 60 degrees Celsius GPS direct signal antenna -40 to 85 degrees Celsius Sanyo N-4000DRL batteries 0 to 40 degrees Celsius Honeywell HG1700 rate gyro TBD Goodrich FM02 magnetometer -55 to 88 degrees Celsius APD D150-15/5 power supply -25 to 85 degrees Celsius 42 Design: Thermal Control System (THRM) Hardware: • Temperature Sensors – Minco S3238PAZT36TB – 12.7 X 31.8 X 1.3 mm • Heaters – Minco HK5160R157L12B – 12.7 X 50.8 X 1.3 mm www.minco.com 43 Design: Thermal Control System (THRM) Thermal Analysis • Transient model, 27 orbital scenarios, 1 node, sphere with same surface area as Goldeneye • Worst Case Hot: – Goldeneye Surface: 75.0 degrees C (67.5 degrees avg) – Goldeneye Payload: 75.3 degrees C (71.3 degrees avg) – Altitude: 150 km • Worst Case Cold: – Goldeneye Surface: -11.0 degrees C (-7.5 degrees avg) – Goldeneye Payload: -9.2 degrees C (-7.3 degrees avg) – Altitude: 450 km 44 System 2 Overview: Ground Station • • • • RISK Communicate, track, and receive data from Goldeneye Send messages to Goldeneye Used with amateur packet radio Located at University of Minnesota 45 System 2 Requirements: Ground Station (GND) Requirement Source Verification Source Document Test/ Analysis Number GND-1 Must abide by applicable FCC regulations M-1 TBD TBD GND-2 Must have no less than 90 degrees range in elevation M-3 TBD TBD GND-3 Must have no less than 360 degrees range in azimuth M-3 TBD TBD GND-4 Must be able to track Goldeneye in any orbit M-3 TBD TBD GND-5 Must have antenna gain large enough to close M-3 link with Goldeneye TBD TBD GND-6 Must be able to transmit data to Goldeneye GS-8 TBD TBD GND-7 Must be able to receive data from Goldeneye GS-8 TBD TBD 46 Design Overview: Ground Station (GND) Antenna DC Power Supply Transceiver TNC DC Power Supply: – TBD Transceiver: – TBD – Receives signal from Goldeneye – Transmits signal from PC PC RISK TNC (Terminal Node Controller): – Kantronics KPC3+ – Takes signal from radio and converts to digital signal – Sends digital signal to computer PC: – Dell Latitude C640 #PP01L – Collects and stores data – Controls TNC – Controls rotator – Tracks Goldeneye (NOVA software) 2 Antennas: – M2 inc: 2MCP22 (144 MHz) Transmits to Goldeneye – M2 inc: 436CP42UG (440 MHz) Receives from Goldeneye 47 Design Overview: Ground Station (GND) 2MCP22 (144 MHz, Transmits) 436CP42UG (440 MHz, Receives) Rotator Rotator • Yaesu G5500 with GS-232A Computer interface • Azimuth Range 0 to 360 Degrees • Elevation Range 0 to 90 Degrees • Max Rotation Speed 6 deg/sec (azimuth), 2.5 deg/sec (elevation) • Rotates the antennas to follow Goldeneye 48 Communication – Link & Licensing RISK RF Link – Signal to noise ratio: -3 dbm – Bit error rate: TBD, based on design and outside interference – Modulation type vs. channel distortion: TBD Licensing – At least level 1 technician – Frequencies: 144/440 MHz (HAM) – Status: Waiting to hear back from FCC about Call sign for Goldeneye, and frequency allocation. 49 System 3 Overview : Ground Support Equipment (GSE) • Transportation – Lifting mechanism – Long distance travel container • Allow complete operation of Goldeneye pre-launch – Autonomous and remotely controlled mission simulations – Charge, discharge, equalize batteries • Monitor Goldeneye on the ground – Pre-launch data collection through flight computer interface, electrical interface, or radios – Post-launch data collection through radios • Process Goldeneye’s data on the ground – Data management plan – Computer designated for processing data 50 Requirements: Ground Support Equipment (GSE) Requirement Source Verification Source Document Test/ Analysis Number GSE-1 Must have mechanical ground support equipment (MGSE) M-8 TBD TBD GSE-1.1 Must have a lifting mechanism to lift Goldeneye from a single point above its center of gravity M-1 TBD TBD GSE-1.2 Must have a safety factor of 5 M-1 TBD TBD GSE-1.3 Lifting mechanism must not contact Goldeneye or nanosat separation system M-1 TBD TBD GSE-2 Must have electrical ground support equipment (EGSE) M-8 TBD TBD GSE-2.1 Must monitor inhibits status M-1 TBD TBD GSE-2.2 Must comply with KHB 1700.7C M-1 TBD TBD GSE-2.3 Must monitor voltage of all battery cells M-1 TBD TBD GSE-2.4 Must use-scoop-proof connectors M-1 TBD TBD GSE-2.5 Must utilize fuse and diode protection to prevent EGSE and usage failures from affecting Goldeneye's hardware M-1 TBD TBD GSE-2.6 Must collect data from all of Goldeneye’s subsystems M-1 TBD TBD 51 Design Overview : Ground Support Equipment (GSE) RISK Electrical Ground Support Equipment From Goldeneye: Ports on Goldeneye: · · · · Battery Maintenance Remote Activation Flight Computer Interface Electrical Interface Goldeneye · · · Battery cell voltages Inhibits status Subsystem data From Laptop: · Commands/Instructions Battery Maintenance: • Allows Nanosat team to charge, discharge, equalize batteries etc. Remote Activation: • “Master Switch” overrides Goldeneye’s onboard subsystems • Allows Nanosat team to activate or deactivate Goldeneye Flight Computer Interface: • Provides subsystem data to laptop • Allows Nanosat team to send commands/instructions to Goldeneye Electrical Interface: • Provides data to laptop for battery cell voltages and inhibits status 52 Launch Vehicle Interface • Mechanical interface RISK • Electrical interface – Aluminum ring protruding from Goldeneye’s bottom structural panel provides integration with Lightband system – 2 microswitches in Lightband will actuate Goldeneye’s inhibits – Wire pigtails from Goldeneye will hang 12” below SIP to connect to microswitches Lightband Interface Wires from Goldeneye connect inhibits to microswitches 53 Program/Subsystem Risk Assessment Overall Program Assessment GSE GND STR THRM PWR COMM FCS NAV ADCS BRS Performance Schedule Cost Safety Testing Manpower Facilities NA Overall Subsystem Assessment = low risk Familiar with design, hardware and implementation = medium risk Somewhat familiar with design, hardware and implementation = high risk NA = N/A Not familiar with design, hardware and implementation 54 Relevance of GPS Bistatic Radar • Easy implementation: requires compact, low power existing hardware that many satellites already use. • Reliable: Augments other data collection systems that can be affected by weather. • Inexpensive: Collects the same data as vital satellites such as QuikSCAT, but at a lower cost. 55 Summer 2007 Organization Demoz Gebre-Egziabher PI (Faculty: Aerospace Engineering) Ellie Field Student PM Jim Pogemiller BRS Lead (MS: Aerospace Engineering) Brett Burgstahler ADCS Lead Mike Brown FCS Lead Trevor Bain Programmer Katrina Faucett COMM and GND Lead Mike Legatt STR Lead Jonah White STR Team Demoz Gebre-Egziabher – PI •gebre@aem.umn.edu Ellie Field – Student PM •fiel0140@umn.edu 56 K-12 Outreach • Farnsworth Elementary June 1, 2007 • Exhibit at the Minnesota State Fair, September 1, 2007 • Tennant Take Your Child to Work Day June 2008 Students from Farnsworth Elementary visiting the Nanosat lab at the University of Minnesota 57 Spacecraft Overview: Exploded View Solar Panel Batteries GPS Direct Signal Antenna Radios Flight Computer 58 Solar Cell Mounting: How Materials: • Solar cells: Emcore triple junction GaAs • Primer: Nusil CF6-135 • Adhesive: Nusil CV10-2568 • Kapton: 3M 1205 Acrylic Tape • Aluminum Honeycomb Panel: Plascore, 0.05”-thick facesheets, 0.5”-thick perforated core Process Overview: • Adhere kapton to cleaned aluminum honeycomb panel • Deaerate adhesive and apply with primer to cleaned kapton using a stencil Solar Cells Primer Adhesive Primer Kapton Aluminum Honeycomb Panel • • Apply primer to the back of cleaned solar cell strings Remove stencil and place solar cells strings on adhesive 59 Solar Cell Mounting: Where 192 Solar Cells Total • Top panel: 60 cells • Bottom panel: 12 cells • Side panel: 30 cells each Bottom Panel Top Panel Side Panel: 4 Total 60 Power System: Inhibit Schematic INH x 3 Solar Cells INH x 3 Batteries INH INH DC/DC Power Supply Satellite Components Inhibits: • Total of 8 independent latching relays, board mounted in different orientations • Prevent batteries from charging • Prevent solar power from reaching power supply • Prevent battery power from reaching power supply 61 Electrical Systems and Power: Battery Box Design • Batteries – 14 Sanyo NiCd Type N-4000DRL cells, strung in series with spot welded Ni201 tabs – 16.8 V, 4 A-hr Battery – Kapton or Kynar insulation for Ni201 tabs – Fuse included in battery box • Battery box – 6061-T651 aluminum cell holder, anodized – 6061-T651 Al, Alodine exterior coating, anodized interior coating – Cells fastened to cell holder using Eccobond 285, provides thermal path – MAT301 absorbent material installed in void spaces to minimize free volume. – Two filtered vents – Two thermistors for temperature sensing – Two heaters for maintaining operating temperature • Battery Testing – Cell level acceptance testing – System level thermal testing followed by battery servicing – Temperature, capacity and voltage monitoring during thermal testing • Alodine: Mil-C-5541E Class 3 • Anodization: Mil-A-8625 “F” Type II Class 2 Lid Lid Gasket Batteries Cell Holder Battery Box Mesh Gasket Vent Hole Cover Vent Hole 62 COMM: Link budget 63 Detailed Schedule 64 Integration and Testing: Before July 2008: Before October 2008: BRS Assembly BRS Functional Test ADCS Assembly ADCS Functional Test NAV Assembly NAV Functional Test FCS Assembly FCS Functional Test COMM Assembly COMM Functional Test PWR Assembly PWR Functional Test STR Assembly STR Functional Test GND Assembly GND Functional Test GSE Assembly GSE Functional Test All tests performed at the University of Minnesota, before FCR Before Jan. 2009 System Integration System Tests: · Bakeout · Thermal Vacuum · Pressure Profile · Envelope Verification · Mass Properties · EMC Self-Compatibility · Electrical System Aliveness and Functional Tests 65 Integration and Testing (table 8-1) Structural Tests Test Component Spacecraft Margins Strength •Sine Burst, Yield, Ultimate X Sine burst at 1.2 times yield requirement, yield SF=2, ultimate SF=2.6 Random Vibration/ Acoustic X 0.25 gRMS from 20 to 2000 Hz (more, table 8.2) Shock X 100-10000 Hz, ASD levels see table 8.3 Stiffness •Sine Sweep X Natural frequency 100 Hz, 0.25 gRMS from 20 to 2000 Hz Thermal Tests Bakeout X X Thermal Vacuum X X X X Depressurization 0.5psi/sec, Repressurization 0.3psi/sec, SF=2 X 60 cm width, 50 cm height X X 50 kg X X MIL-STD-461E X X Physical Tests Pressure Profile Envelope Verification Mass Properties EMC Tests Self-Compatibility Functional Tests Electrical System Aliveness and Functional Tests 66 Bistatic Radar System Detailed Requirements Subsystem / Component Requirements Method Must accept incoming GPS signals Antenna must be LHCP to avoid a 3dB signal loss due to reflected polarization at the L1 signal frequency (1575.42MHz). Design, Test SiGe GPS Front End must accept data using the GN3S software. Design, Test Must determine Earth surface conditions Must plot GPS signal characteristics as a delay vs. Doppler map Analysis Signal characteristics used to correlate to NOAA ocean buoy data and QuikScat satellite data Analysis Must validate experimental results. Use uncorrelated Goldeneye data to predict ocean surface conditions then compare those conditions to NOAA buoy data and QuikScat satellite data. Analysis 67 ADCS Detailed Requirements Subsystem / Component Requirements Method Must provide on-orbit Goldeneye attitude data Will utilize a magnetometer and a rate gyro to determine attitude. Design, Test Must provide data to the flight computer. Design, Test Must detumble and despin Goldeneye on orbit Will utilize magnetic torquers. Analysis Must provide on-orbit directional control with a nadir-facing pointing accuracy of +/- 20 degrees Will utilize magnetic torquers. Analysis Will use gravity gradient stabilization to augment magnetic torquers. Analysis 68 Navigation System Detailed Requirements Subsystem / Component Requirements Method Must determine position and velocity in orbit. Will utilize OEMV-G3 GPS receiver for navigation solution. Design, Test Will use San Jose SA-60C GPS antenna. Design, Test Must provide navigation solution to the flight computer. Test 69 FCS Detailed Requirements Subsystem / Component Requirements Method Must collect all sensor data. Must accept incoming sensor data from all sources. Design, Test Must compress data for storage Will use data compression algorithm similar to WinZip. Test Must store collected data onboard. Will utilize at least 2 Gb flash memory. Analysis Must determine attitude. Must have algorithms to determine attitude. Test Must Control Attitude. Must have algorithms to control attitude for desipinning, detumbling, and nadir pointing. Analysis, Test Must decide when to turn on bistatic radar experiment. Will compare navigation solution to a matrix of predetermined global locations of ocean boundaries. Analysis Must be able to communicate with Communication System. Requires an RS232 connection to the radios. Design, Test 70 Communication System Detailed Requirements Subsystem / Component Requirements Method Must abide by applicable FCC regulations. Must have personnel with amateur radio licenses. Analysis Must contact FCC for frequency allocation and call sign. Analysis Must have inhibits preventing RF emissions before deployment. Will be inhibited by four independent latching relays that are a part of the power system’s inhibits. Design, Test Must be able to communicate with Ground Station during transmission windows. Must have an antenna that receives at 144 MHz and transmits at 440 MHz Analysis, Test Must be able to communicate with Flight Computing System. Must have RS232 interface between radios and flight computer. Test 71 Power System Detailed Requirements Subsystem / Component Requirements Method Must have inhibits to prevent start-up before deployment. Must have eight independent inhibits in the configuration specified by the User’s Guide. Design, Test Must charge batteries with solar cells. Must connect solar cells to batteries and allow electrical power to bypass batteries when batteries are full. Design, Test Must control component activation and deactivation. Must control power switches to each component. Design, Test Must supply power to components at regulated voltages. Will use a DC/DC converter with dual outputs at regulated voltages. Design, Test Must supply enough power to support mission. Must have enough solar cells and battery capacity to support mission. Analysis, Test Must protect components from transients. Will utilize filters and decoupling capacitors. Design, Test Must protect components from overcurrent. Must monitor current consumption of each component. Design, Test Must deactivate component if current draw is beyond component threshold. Design, Test Must prevent batteries from overcharging. Must divert solar power to DC/DC converter when batteries are full Design, Test Must mitigate short circuit failures. Must utilize a single point ground. Design, Test Must monitor health. Must collect data from sensors that monitor battery voltages, bus voltages, component current, bus current, component logic states and component box temperatures. Design, Test Must transmit health data to flight computer. Must communicate with flight computer through an RS232 link. Design, Test 72 Structure Detailed Requirements Subsystem / Component Requirements Method Must comply with Nanosat-5 program requirements. See requirements verification matrix. Design, Analysis, Test Must provide metal components boxes for Goldeneye's hardware. Will use fully enclosed aluminum boxes Design, Analysis Will have vent holes Analysis Must have an electrically conductive coating on metal component boxes. Will use Alodine Analysis Must have moments of inertia such that I_xx > I_yy > I_zz. Must enable gravity gradient stabilization in orbit Design, Analysis 73 Thermal Control System Detailed Requirements Subsystem / Component Requirements Method Must maintain proper temperature ranges for components to operate. Must monitor temperature within every component box. Design, Test Will use heat sinks for components that consume greater than 1 Watt. Design, Analysis, Test Will use heaters. Design, Analysis, Test 74 Ground Station Detailed Requirements Subsystem / Component Requirements Method Must abide by applicable FCC regulations. Must have personnel with amateur radio licenses. Analysis Must contact FCC for frequency allocation and call sign. Analysis Must have no less than 90 degrees range in elevation. Will use Yaesu G5500 rotator. Design, Analysis, Test Must have no less than 360 degrees range in azimuth. Will use Yaesu G5500 rotator. Analysis Must be able to track Goldeneye in any orbit. Will utilize NOVA software. Analysis Must have antenna gain large enough to close link with Goldeneye. TBD Analysis Must be able to transmit data to Goldeneye. Will use antenna from M2 inc: 2MCP22 (144 MHz). Analysis, Test Must be able to receive data from Goldeneye. Will use antenna from M2 inc: 436CP42UG (440 MHz). Analysis, Test 75 GSE Detailed Requirements Subsystem / Component Requirements Method Must have mechanical ground support equipment (MGSE). Must have a lifting mechanism to lift Goldeneye from a single point above its center of gravity. Design, Test Must have a safety factor of 5. Analysis Lifting mechanism must not contact Goldeneye or nanosat separation system. Design, Analysis Must have electrical ground support equipment (EGSE). Must monitor inhibits status. Design, Test Must comply with KHB 1700.7C. Analysis, Test Must monitor voltage of all battery cells. Design, Test Must use-scoop-proof connectors. Design Must utilize fuse and diode protection to prevent EGSE and usage failures from affecting Goldeneye's hardware. Analysis, Test Must collect data from all of Goldeneye’s subsystems. Design, Test 76