Surface Displacements of a Triangular Load Distribution for Numerical Brian Ruggiero
advertisement

Surface Displacements of a Triangular Load Distribution for Numerical
Solutions of Contact Problems
Brian Ruggiero
Numerical Analysis for Engineering (NAE) (MEAE-4960)
April 23, 2001
Table of Contents
1. List of Symbols Used
2
2. Introduction
3
3. Problem Description and Formulation
3
4. Numerical solution
6
5. Results
7
6. Error Analysis
8
7. Discussion
9
8. Conclusions
9
9. References
11
10. Appendices
1. Matlab program text for the analytical solution
12
2. FEM text output
13
3. Matlab example program
17
-1-
List of Symbols Used
O
S
h
uz
P
p0
pj
j
c
v
E
p(s)
q(s)
a
C
Initial contact point
Arbitrary point on the contact surface within the contact region
Function of the gap between two surfaces before contact
Displacement of a point from the contact plane
Displacement of two bodies in contact after deformation
Load exerted on a body in contact in units of force per unit length
Maximum pressure exerted at the point of first contact
Pressure at node j
Node number
Distance between nodes
Poisson’s ratio
Modulus of elasticity
Normal pressure distribution
Tangential pressure distribution
Contact length
Constant of integration
-2-
Introduction
The first analysis of stress at the contact of two elastic solids was conducted by Hertz in
the early 1880s. His model for a general contact problem can be simplified to twodimensions for the normal contact of two cylindrical bodies. Results can be calculated to
good approximation by considering each body as a semi-infinite elastic solid bounded by
a plane surface. This is also known as an elastic half-space. The significant dimensions of
the contact area must be small compared with the dimensions of the body and with the
relative radii of curvature of the surfaces. Many contact problems do not permit
analytical solutions and require numerical methods to find a solution. Conforming
contacts and problems with friction involving partial slip are several examples of contact
problems that cannot be solved analytically. Several methods are available for solving
contact problems numerically. The use of triangular elements to calculate the contact area
and pressure distribution in contact problems requires the derivation of a triangular
distribution of load. Analytical solutions are derived from general pressure distributions
applied to an elastic half-space in plane strain. Numerical methods such as the finite
element method can solve for surface displacements by searching for the solution of a
function among the set of those which minimize an integral1. The solution of a triangular
distribution for use in the numerical solution of contact problems will be derived in the
following sections.
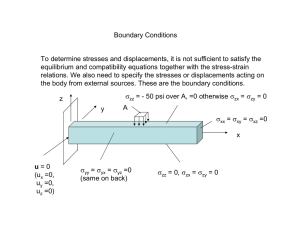
Problem Description and Formulation
Contact problems begin with the understanding of two non-conforming smooth surfaces
in contact. When they are brought into contact they initially touch at a single point O or
along a line. Under the action of the slightest load they deform in the vicinity of their
point of first contact so that they touch over an area that is finite though small compared
with the dimensions of the two bodies2. Datum z is chosen as the plane tangent to both
bodies at the point of first contact. Before deformation the separation between two
corresponding surface points S1 and S2 is given by h. If the solids did not deform their
profiles would overlap. Due to contact pressure the surface of each body is displaced
parallel to the z-axis by an amount uz1 and uz2 (measured positive into each body) as
shown in figure 1. If, after deformation, the points S1 and S2 are coincident within the
contact surface then
u z1 u z 2 h 0
(1a)
within the contact surface, and
u z1 u z 2 h 0
(1b)
outside the contact surface.
-3-
Figure 1.
For simplification we must neglect tangential tractions and assume that the surfaces are
frictionless. This will incur only a small loss of precision. As stated earlier the contact
between two cylinders in plane strain will produce a line contact after deformation. The
load exerted on the bodies is represented by a force P per unit length. For the numerical
solution the continuously distributed contact force created by load P is divided into a
discrete set of elements with can be represented several ways. The simplest being an
array of concentrated normal forces. This is not a useful representation because an
infinite displacement will occur at the point of contact. This can be avoided by using
uniformly distributed pressure elements shown as a stepwise distribution. The surface
displacements are now finite everywhere, but the displacement gradients are infinite
between adjacent elements where there is a step change in traction2. A triangular
distribution with overlapping elements produces surface displacements that are
everywhere smooth and continuous. This is called a piecewise-linear distribution of
traction and is shown in figure 2.
-4-
p0
pj
O
c
Figure 2.
Where p0 is the maximum pressure at the initial contact point O, pj is the pressure
element at node j, and c is the distance between nodes. The elastic displacements of
corresponding points on the two surfaces must satisfy equations (1a) and (1b). The
surface displacements are found by evaluating the displacement gradients at the surface
of an elastic half space loaded with a triangular distribution. The general form of the
equation is
a
u z
2(1 2 ) p( s)
(1 2 )(1 )
ds
q ( x)
x
E b x s
E
(2)
Where p(s) is the normal traction and q(s) is the tangential traction. The gradient
u z / x is the actual slope of the deformed surface. As stated earlier friction will be
neglected thus simplifying equation (2). Substituting the normal distribution function and
integrating yields the following equation:
2
2
(1 2 ) p0
xa
xa
2
2
2
2
uz
( x a) ln
2 x ln( x / a) C
( x a) ln
2 E a
a
a
(3)
-5-
Where is Poisson’s ratio, E is the Modulus of Elasticity of the material, and C is the
constant of integration. C is dependent on the coordinate system chosen and is found
where uz = 0. Equation (3) is the surface displacement of an elastic half-space loaded
with a triangular distribution. It is used to calculate the matrix of influence coefficients.
The pressure element at each node is affected by the deflection of every other node. It is
the summation over a region larger than the contact area that is used to numerically
calculate the pressure distribution and contact area. Two methods that use this method
are:
1. The direct, or Matrix Inversion method in which the boundary conditions are
satisfied exactly at specified ‘matching points’, usually the mid-points of the
boundary elements.
2. The Variational method in which the values of the traction elements are chosen to
minimize an appropriate energy function.
It is beyond the scope of this paper to go into any more detail regarding the above
methods. A Matlab program using the Matrix Inversion method can be found in the
Appendix.
Numerical Solution
Calculating surface displacements of a triangular distribution can be determined using the
finite element method (FEM). Numerous software packages are available to efficiently
run FEM analysis. For this exercise Pro/Mechanica Structure, the finite element analysis
(FEA) module of the CAD package Pro/Engineer, will be used to calculate the surface
displacement. The arbitrary body is loaded in plane strain over a 0.020” wide portion of
the surface (a = .010). A 1000 pound/inch load is applied using the following load
distribution:
p ( x)
p0
(a | x |)
a
(4)
This is the same load distribution used in the analytical solution. Again, the triangular
distribution is used for two-dimensional contact problems in plane strain. Figure 3 shows
a graphical output of the displacements in the z-direction (shown as the y-direction) for
the pressure distribution outlined above.
-6-
Figure 3.
It is interesting to note that the displacement effects subjected to the load are apparent
throughout the body. Although the body is considered infinite the geometry chosen in
the analysis is sufficiently large compared to the loaded region and does not affect the
results. The following section compares the FEM and the analytical solution.
Results
Figure 3 shows the comparison between the FEA described above and the same problem
solved using equation (3). The constant of integration C was evaluated at x = 10. This is
an arbitrary distance chosen using equation (2) to determine when the displacement
gradient approaches zero.
-7-
Displacement Comparison
1.80E-06
Displacement (inch)
1.60E-06
1.40E-06
1.20E-06
Analytical
FEA (z-dir)
FEA (mag)
1.00E-06
8.00E-07
6.00E-07
4.00E-07
2.00E-07
0.00E+00
0.000
0.010
0.020
0.030
0.040
0.050
0.060
x-distance
Figure 4
Note that the displacements are symmetrical about x = 0. The displacements are nearly
identical under the loaded region (a = 0.010). The error increases as the measure is taken
further and further from the loaded region. The results of the FEA can output
displacements in the x and z-directions as well as displacement magnitude. Figure 4
shows FEA displacements in the z-direction and magnitudes as well as the analytical
displacements in the z-direction.
Error Analysis
As stated earlier the error increases as the measure is taken further from the loaded
region. The results plotted for the FEA are displacements in the z-direction only. Note
that comparison between the displacement in the z-direction and the displacement
magnitudes of the FEA have nearly identical results. This tells us that the displacements
in the x-direction are negligible and our analytical solution is valid for use in the
numerical solution of contact problems. Figure 5 shows the values obtained from the
analytical solution, FEM displacement magnitudes, FEM displacements in the zdirection, and error. Error is calculated using displacements in the z-direction only. Error
is not sensitive to changes in the C constant providing that it was calculated a distance far
from the loaded region. The error remains in the order of 10E-7.
-8-
measure1:
measure2:
measure3:
measure4:
measure5:
measure6:
measure7:
measure8:
measure9:
measure10:
measure11:
X
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
0.045
0.050
FEA (mag)
1.594640E-06
1.524936E-06
1.334915E-06
1.154452E-06
1.055451E-06
9.820083E-07
9.241372E-07
8.760405E-07
8.340999E-07
7.975570E-07
7.653622E-07
FEA (z-dir)
1.594637E-06
1.523029E-06
1.328265E-06
1.146614E-06
1.046848E-06
9.728517E-07
9.145697E-07
8.661087E-07
8.238028E-07
7.869750E-07
7.545242E-07
Analytical
1.623605E-06
1.518787E-06
1.355898E-06
1.263561E-06
1.204335E-06
1.159662E-06
1.123621E-06
1.093360E-06
1.067257E-06
1.044296E-06
1.023796E-06
Error
2.896480E-08
6.148600E-09
2.098260E-08
1.091090E-07
1.488841E-07
1.776537E-07
1.994842E-07
2.173195E-07
2.331570E-07
2.467391E-07
2.584342E-07
Figure 5
Discussion
The finite element method has gained enormous popularity in recent years due to its
increase in flexibility and exponential leaps in computing power. It seams as if every
CAD package has an FEA module or has the capability of exporting its geometry to FEA
software. It is becoming relatively easy to use the finite element method. Engineers
simply apply loads and constraints and output a beautifully contoured fringe plots that
animate the deflections and highlighting all the “hot spots”. Engineers need to take a step
back and evaluate their results, baseline them to analytical results, and correlate the
analysis to test data. The results should not be taken at face value. It is too easy to miss a
decimal point or create a bad mesh when it comes to using FEA. The correlation shown
above is a good indicator that the FEA was performed on a robust model.
Conclusions
Numerical solutions of contact problems are typically used when the size or shape of the
contact area is unknown. A piecewise-linear distribution of traction using triangular
distributions with overlapping elements produces surface displacements that are
everywhere smooth and continuous. Results show how the triangular load deflects the
surface at distances well outside the loaded region. Each element has an effect on the
remaining elements. Similarly solutions of point load contact problems are solved using
an array of pyramid elements based on the same idea. Verification of simple problems
such as two cylinders in contact or two spheres in contact can be done using Hertz
method. Hertz’s theory has been shown to agree very closely with experimental results
for small deformations. The finite element method is the generally preferred method for
calculating stress and deflection. Using FEA for contact analysis involves slightly more
complicated software. Some FEA packages have the capability of refining the mesh at the
point of contact. Contact problems are difficult because the contact area is constantly
changing until the material stops deflecting. The method used in this paper is probably
the most commonly used. The pressure distribution and contact patch is calculated and
-9-
directly applied to the body. This works for simple contact situations, which are
fortunately the most common. FEA has the advantage of analyzing complicated
geometry, providing the most accurate results, and efficiently calculating an array of
results in a relatively short amount of time.
- 10 -
References
1. Ernesto Gutierrez-Miravete, Session 12: (NAE) MEAE-4960
2. Johnson, K. L., Contact Mechanics, CambridgeUniversity, UK, 1985.
3. Paul, B., Hashemi, J., “Contact Pressures on Closely Conforming Elastic Bodies,”
ASME Journal of Applied Mechanics, Vol. 48, (1981): 543-548
4. Singh, K. P., Paul, B., “Numerical Solution of Non-Hertzian Elastic Contact
Problems,” ASME Journal of Applied Mechanics, Vol . 41, (1974): 484-490
5. Timoshenko, S. P., Goodier, J. N., Theory of Elasticity, 2nd ed., McGraw-Hill, NY,
1951.
- 11 -
Appendix 1
Matlab program to calculate surface displacements of a triangular load
%Tri_dist.m
%Program calculates surface displacement of a triangular load distribution
%04/14/2001
clear;
P=1000;
c=.010;
EE=30000000;
v=.30;
z=10;
E=1/(2*(1-v^2)/EE);
%Force (lb/inch)
%Element size (inch)
%Modulus of Elasticity (psi)
%Poissons's ratio
%zero intersection
%Calculates triangular element constant
g=inline('-(1-v^2)/(2*pi*EE)*P/c*((x+c)^2*log(((x+c)/c)^2)+(x-c)^2*log(((x-c)/c)^2)2*x^2*log((x/c)^2))','x','v','EE','P','c');
const=-g(z,v,EE,P,c);
for i = 1:11
x(i)=(i-1)*.005;
x(1)=.0000001;
x(3)=.01+.0000001;
f(i)=-(1-v^2)/(2*pi*EE)*P/c*((x(i)+c)^2*log(((x(i)+c)/c)^2)+(x(i)-c)^2*log(((x(i)c)/c)^2)-2*(x(i))^2*log((x(i)/c)^2))+const;
end
ff=f';
figure(1)
plot(f);
save disp.out ff –ASCII
1.6236048e-006
1.5187874e-006
1.3558976e-006
1.2635610e-006
1.2043351e-006
1.1596620e-006
1.1236214e-006
1.0933600e-006
1.0672569e-006
1.0442961e-006
1.0237964e-006
- 12 -
Appendix 2
Pro/Mechanica Structure output file
-----------------------------------------------------------Pro/MECHANICA STRUCTURE Version 22.3(305)
Summary for Design Study "Analysis3_Y"
Tue Apr 17, 2001 13:03:40
-----------------------------------------------------------Run Settings
Memory allocation for block solver: 256.0
Checking the model before creating elements...
These checks take into account the fact that AutoGEM will
automatically create elements in volumes with material
properties, on surfaces with shell properties, and on curves
with beam section properties.
Not all of the materials assigned to the model contain
failure data. Failure Index measures will only be
calculated for materials with failure data.
Generate elements automatically.
Checking the model after creating elements...
No errors were found in the model.
Pro/MECHANICA STRUCTURE Model Summary
Principal System of Units: Inch Pound Second (IPS)
Length:
in
Force:
lbf
Time:
sec
Temperature: F
Model Type: Plane Strain
Points:
Edges:
Faces:
54
103
50
Springs:
Masses:
0
0
- 13 -
2D Shells:
2D Solids:
0
50
Elements:
50
-----------------------------------------------------------Standard Design Study
Static Analysis "Analysis3_Y":
Convergence Method: Multiple-Pass Adaptive
Plotting Grid: 10
RMS Stress Error Estimates:
Load Set
Stress Error % of Max Prin Str
---------------- ------------ ----------------LoadSet1
4.64e+00
0.5% of 9.93e+02
Resource Check
(13:03:46)
Elapsed Time (sec):
7.28
CPU Time
(sec):
4.75
Memory Usage
(kb): 285866
Wrk Dir Dsk Usage (kb):
0
The analysis converged to within 10% on
edge displacement, element strain energy,
and global RMS stress.
Total Mass of Model: 1.464799e-03
Total Cost of Model: 0.000000e+00
Mass Moments of Inertia about WCS Origin:
Ixx: 4.88266e-04
Ixy: 9.51973e-20 Iyy: 4.88266e-04
Ixz: 0.00000e+00 Iyz: 0.00000e+00 Izz: 9.76532e-04
Principal MMOI and Principal Axes Relative to WCS Origin:
Max Prin
9.76532e-04
Mid Prin
4.88266e-04
Min Prin
4.88266e-04
- 14 -
WCS X: 0.00000e+00
WCS Y: 0.00000e+00
WCS Z: 1.00000e+00
0.00000e+00
1.00000e+00
0.00000e+00
1.00000e+00
0.00000e+00
0.00000e+00
Center of Mass Location Relative to WCS Origin:
( 2.15621e-16, -5.00000e-01, 0.00000e+00)
Mass Moments of Inertia about the Center of Mass:
Ixx: 1.22067e-04
Ixy: -6.27237e-20 Iyy: 4.88266e-04
Ixz: 0.00000e+00 Iyz: 0.00000e+00 Izz: 6.10333e-04
Principal MMOI and Principal Axes Relative to COM:
Max Prin
6.10333e-04
Mid Prin
4.88266e-04
WCS X: 0.00000e+00
WCS Y: 0.00000e+00
WCS Z: 1.00000e+00
Min Prin
1.22067e-04
0.00000e+00
1.00000e+00
0.00000e+00
1.00000e+00
0.00000e+00
0.00000e+00
Constraint Set: ConstraintSet1
Load Set: LoadSet1
Resultant Load on Model:
in global X direction: -7.160892e-14
in global Y direction: -1.600000e+01
Measures:
Name
Value Convergence
-------------- ------------- ----------max_disp_mag:
1.594637e-06
0.3%
max_disp_x:
1.375065e-07
0.5%
max_disp_y:
-1.594637e-06
0.3%
max_disp_z:
0.000000e+00
0.0%
max_prin_mag:
-9.927550e+02
0.0%
max_rot_mag:
0.000000e+00
0.0%
max_rot_x:
0.000000e+00
0.0%
max_rot_y:
0.000000e+00
0.0%
max_rot_z:
0.000000e+00
0.0%
max_stress_prin: 7.918202e+01
1.2%
max_stress_vm:
5.317132e+02
0.3%
max_stress_xx: -9.787585e+02
0.3%
- 15 -
max_stress_xy: -2.626563e+02
max_stress_xz:
0.000000e+00
max_stress_yy: -9.927550e+02
max_stress_yz:
0.000000e+00
max_stress_zz: -5.914541e+02
min_stress_prin: -9.927550e+02
strain_energy:
1.212280e-05
measure1:
-1.594637e-06
measure10:
-7.869750e-07
measure11:
-7.545242e-07
measure2:
-1.523029e-06
measure3:
-1.328265e-06
measure4:
-1.146614e-06
measure5:
-1.046848e-06
measure6:
-9.728517e-07
measure7:
-9.145697e-07
measure8:
-8.661087e-07
measure9:
-8.238028e-07
0.2%
0.0%
0.0%
0.0%
0.2%
0.0%
0.3%
0.3%
0.1%
0.1%
0.3%
0.3%
0.3%
0.3%
0.3%
0.2%
0.2%
0.1%
Analysis "Analysis3_Y" Completed (13:03:46)
-----------------------------------------------------------Memory and Disk Usage:
Machine Type: Windows NT/x86
RAM Allocation for Solver (megabytes): 256.0
Total Elapsed Time (seconds): 7.34
Total CPU Time (seconds): 4.80
Maximum Memory Usage (kilobytes): 285866
Working Directory Disk Usage (kilobytes): 0
Results Directory Size (kilobytes):
2150 .\Analysis3_Y
-----------------------------------------------------------Run Completed
Tue Apr 17, 2001 13:03:46
------------------------------------------------------------
- 16 -
Appendix 3
Matlab program for contact between two cylinders. Compares numerical method to
Hertz method.
%Contact.m
%Program to numercally calculate contact area and pressure distribution between two
cylinders
%03/28/2001
clear;
P=2500;
c=.0005;
EE=30000000;
v=.30;
R1=1;
R2=3;
n=37;
nn=n-1;
z=1;
aa=9;
%Force (lb/inch)
%Element size (inch)
%Modulus of Elasticity (psi)
%Poissons's ratio
%Radius of cylinder 1 (inch)
%Radius of cylinder 2 (inch)
%Number of nodes
%n-1 nodes
%zero intersection
%Node where p becomes zero
E=1/(2*(1-v^2)/EE);
R=1/(1/R1+1/R2);
%Calculates triangular element constant
g=inline('(1-v^2)/(2*pi*EE*c)*((x+c)^2*log(((x+c)/c)^2)+(x-c)^2*log(((x-c)/c)^2)2*x^2*log((x/c)^2))','x','v','EE','c');
const=-g(z,v,EE,c);
%Calculates influence coefficients
for i = 1:nn
%i=1 refers to i=0
for j = 1:nn
k=i-j;
x=k*c;
if x < -z
x=-z;
elseif x == -c
x=-c+.0000001;
elseif x == 0
x=.0000001;
elseif x == c
x=c+.0000001;
elseif x > z
x=z;
else
- 17 -
end
f=inline('-(1-v^2)/(2*pi*EE*c)*((x+c)^2*log(((x+c)/c)^2)+(x-c)^2*log(((x-c)/c)^2)2*x^2*log((x/c)^2))+const','x','v','EE','c','const');
ff(i)=f(x,v,EE,c,const);
C(i,j)=f(x,v,EE,c,const);
B(i,j)=C(1,j)-C(i,j);
end
h(i,:)=.5*(1/R)*((i-1)*c)^2;
end
%Sets pi=0 for negative pressures
for i =aa:nn
for j = 1:nn
if j ~= i
B(i,j)=0;
Else
h(i)=0;
end
end
end
%Calculates last equation
A=c*(aa-2)
%Contact area
h(1)=P;
for j = 1:nn
B(1,j)=A;
end
p=B\h;
%Pressure distribution
save Numer.out p -ASCII
%Solution using Hertz method
a=sqrt(4*2*P*R/(pi*E));
%Contact width
p0=2*2*P/(pi*a);
%Maximum pressure
i=1;
x=0;
while x < (a-c)
x(i)=i*c;
p_h(i)=2*2*P/(pi*a^2)*(a^2-(x(i))^2)^(.5); %Pressure distribution
i=i+1;
end
for j = i:(n-1)
p_h(j)=0;
- 18 -
end
pp=p_h';
figure(1)
subplot(2,2,1)
xx = 1:(n-1);
plot(xx,p,xx,pp);
- 19 -