B. Background and Significance [Revised]

Principal Investigator/Program Director (Last, First, Middle
): Kagan, Harris
B. Background and Significance [Revised]
PET for molecular imaging in small animals
Positron emission tomography is a readily used diagnostic tool in neurology, cardiology and oncology. PET’s major strength is the ability to visualize and quantify metabolic processes. Over the past decade numerous instruments aimed at small animal PET have been developed [3-42]. Several have been commercialized and are now in extensive use. The most well-known of the commercial instruments for small animal PET is the series of MicroPET systems pioneered at UCLA [5-9, 31]. The MicroPET R4 is a rat sized system having a resolution of 2.2mm across a 40mm field-of-view and an absolute efficiency of ~2.2% for a 250-650keV window and an absolute efficiency of ~1.2% for a 350-650keV window [43]. This system has become a workhorse for PET tumor imaging studies at many institutions. There have been a number of updates and improvements to the basic technology and recently other instruments have become commercially available
[44]. Although such devices have pioneered the way for PET tumor imaging, spatial resolution across the fieldof-view remains in the 1-2mm range for a volume resolution of 8
l. Biomedical scientists have a strong desire for spatial resolutions less than 1mm FWHM in 3D so that tracer concentration in volumes as small as 1
l can be reliably quantified [7]. This is especially true for imaging mice.
Imaging with novel positron emitters [New]
F-18 has been the most widespread radionuclide in PET. Its 110 minute half-life is convenient for many studies, it’s a pure positron emitter with low endpoint energy positrons (635 keV), and it is reasonably straightforward to label a variety of compounds —FDG of course being the most common. Other “elements of life” including C-11, N-13, and O-15 have also been widely used. Even though their short half-lives render many radiochemical syntheses difficult and their positron energies are higher than desired, these nuclides have found clinical use in C-11 acetate and C-11 methionene for cancer imaging, N-13 ammonia for heart imaging, and O-15 water in brain activation studies (although it has largely been replaced by functional MRI).
For a long while, PET purists only seriously considered the above positron-emitting nuclides for imaging (other than Rb-82 as a curiosity for heart imaging). In the newer era of molecular imaging, however, where animal models of human disease are used to study methods of detection, mechanisms of progression, and earlier assessment of the efficacy of treatment (with emphasis on cancer), a large number of new imaging probes are under development. Some are labeled using F-18 and C-11; however, an increasing number are not. The short half-lives of F-18 and C-11 are inappropriate for labeling compounds such as polypeptides or monoclonal antibodies that may take hours or even days to reach their maximum target-to-background ratios. Longer lived positron emitters are required. Fortunately, the nuclide chart is replete with possibilities; Tc-94m, I-124, Br-76,
Ga-68, Zr-89, and Y-86 in addition to many other non-conventional positron emitters are finding increasing use in preclinical imaging using small animals. A small sample of these ongoing developments is provided in references [58-60, 95-109] with the PET chemistry group at Washington University a driving force in the development.
While these “new” positron emitting nuclides allow radiochemists and biomedical investigators a new degree of creative freedom, many come with additional baggage in the form of cascade gamma-rays and positrons having relatively high endpoint energies. For additional background on some of these alternative radionuclides, Laforest, et al.
gives an excellent overview of the challenges in small animal imaging [91]. In particular, the large positron range of many emitters can seriously degrade resolution and noise properties of
PET images. As outlined in the previous section, the subject of this investigation focuses on the development and evaluation of method that will significantly reduce the effect of positron range in 3D.
Spatial resolution in PET [Revised]
In order to put the performance degradations due to the positron-range in the right context, consider the following common view of the components of spatial resolution in PET
PHS 398/2590 (Rev. 09/04, Reissued 4/2006) Page Continuation Format Page
Principal Investigator/Program Director (Last, First, Middle
): Kagan, Harris r tot
r
2 det
r
2 acol
r
2 r
2 mot
r
2 rec where r tot is the composite resolution in reconstructed images, r det is the contribution from the PET detector, r acol is the contribution due the acolinearity of the annihilation radiation, and r
β the contribution due to positron range. Degradations to spatial resolution due to animal movement from respiration, for example, are denoted by r mot
. Obviously, this is a complex issue that can either be small relative to the other contributions or not depending on the location, the positron emitter, etc. It is a topic of active research and we shall not deal with it further here. Finally, r rec
is additional blurring in the reconstruction (assuming no resolution recovery is attempted) to tame noise. We assume that each resolution component represents the rms uncertainty of the induced coincidence line response function (CLRF) of the specific effect converted to an “equivalent Gaussian
FWHM” by multiplying by sqrt(8ln(2)) (2.35). Regardless of the shape of the individual CRLF contributions, if all uncertainties are of similar magnitude, the overall CRLF tends toward Gaussian and the overall FWHM becomes an accurate depiction of reality. This is a simplified view of resolution since there is no accounting for noise or the fact that blurring can be “undone” by the reconstruction; nevertheless, it serves as a convenient point of departure for discussing the contribution of each effect.
The degradation from acolinearity is due to the non-zero momentum of the positron-electron pair at annihilation. Since most positrons thermalize before annihilation, this momentum is most strongly related to that of the electron —and in particular, the momentum of valence electrons (due to Coulomb repulsion of positrons from the nucleus). As one might expect, the momentum distribution and resulting angular deviation is material dependent and in fact angular correlation of annihilation radiation spectroscopy (ACAR) uses just this effect to characterize various materials. One might also suspect that the residual momentum would cause a corresponding Doppler shift in the annihilation radiation from m
β c 2 (511) keV. Indeed, this is the case and the energy deviation has been used to verify that the angular uncertainty for water (δ = 8.8 mrad FWHM) is close to that actually observed in human subjects (9.6 mrad) in PET with the shape of the response nearly
Gaussian [110]. A simple geometric argument relates this uncertainty to the FWHM blurring contribution to each PET line-of-respon se (LOR) as δ x R
1
R
2
/(R
1
+R
2
), where R
1
and R
2
are the distances from the annihilation to detection of each photon. This reduces to the commonly used 0.0022 x D (or 0.0024 x D) at the center of the FOV where D is the PET ring diameter in millimeters. For the 17 cm detector separation of the proposed measurement system, the acolinearity contribution is ~0.37 mm FWHM. Considering that detectors with outstanding depth-of-interaction (DOI) resolution will allow ring diameters as small as 4
–5 cm for mouse imag ing, the contribution of acolinearity will ultimately only be ~100 µm, which must be added in quadrature with other resolution components. In comparison with positron range, the additional blurring due to acolinearity will be negligible in well designed small animal PET systems of the future.
The PET detector
—especially in small animal imaging with F-18 labeled tracers—has traditionally been the largest factor in overall spatial resolution. Not surprisingly, it has been the subject of extensive investigations over the years. While we give an overview of developments and the overall state of the field in regards to small animal PET devices, because of the sheer number of investigations it is infeasible to cover all in detail.
Due to the short turnaround for resubmission that NIH has offered us, we rather inelegantly point out two things in this section: (1) PET detector resolution will likely not remain the dominating component in the above expression (but the field is not there yet), and (2) present instruments —including MRI/PET hybrid systems— have limitations for performing our proposed measurements and our approach using a modified very high resolution silicon PET device [92] is preferable.
Detector resolution is limited by several factors including detector element size, inter-element scatter, depth-ofinteraction uncertainty, and decoding errors also known as “block-effect” degradations in multiplexed scintillator/photodetector systems [2]. There have been many efforts and much progress toward sub-millimeter spatial resolution in PET. The bulk of these attempts have taken the approach of further subdividing the detector elements (scintillation crystals) to 1mm x 1mm or less. Some notable efforts in this trend are the
MicroPET II, its commercial version , the microPET™ Focus 120 from CTI Molecular Imaging, the MMP II at
MGH, and the MiCES series of scanners at U. Washington [6, 10, 45, 46]. The resolution for MicroPET II ranges from 0.83mm x 0.83mm x 1.2mm (0.83µl) on-axis to 1.5mm x 1.2mm x 1.2mm (2.2µl) at 2cm. For the
Focus, it is 1.3mm (2.5µl) on-axis. For the MMP-II, the resolution is 1.2mm on-axis, 1.6 at 2cm off. And for
PHS 398/2590 (Rev. 09/04, Reissued 4/2006) Page Continuation Format Page
Principal Investigator/Program Director (Last, First, Middle
): Kagan, Harris
QuickPET II, the reported resolutions range from 1.1mm on-axis to 2.0mm at 2.2cm. There are, of course, numerous other efforts aimed at high resolution with scintillators [19, 47-49]. Recently, 0.6mm FWHM was reported using small arrays of 0.5mm x 0.5mm x 10mm LSO scintillators [50]. While resolution at the center of the FOV for these devices is good, it degrades off-axis due to unmeasured depths-of-interaction (DOI) in the scintillation detectors. High resolution detector technologies other than scintillation detectors have been proposed —and a few built—as well. Some have demonstrated sub-millimeter spatial resolution. The HIDAC system [18], the NRL HPGe PET [24], RPC PET [51], PET using silicon strip detectors [52, 53], and PET using
CZT [54-57] are examples.
Spatial resolution in a practical system for small animal imaging must be accompanied by efficiency, which can be increased by increasing the solid-angle subtended by the detector or by using thicker detectors. Greater solid-angles can be obtained by stretching the axial extent of the ring or by shrinking its diameter. While reducing ring size is an attractive option from the standpoint of cost, parallax effects due to unmeasured DOI in thick crystals become severe at small diameters exacerbating the problem of non-uniform transverse resolution. This will obviously be a big effect for the small-bore 1 st generation hybrid PET/MRI devices.
Detectors demonstrating DOI capability remain a subject of active investigation
—especially those based on scintillators [16, 48, 49, 55, 61-78]. Many of these methods are based on multi-layer approaches using individual photodetectors [79] or phoswichs [36, 62, 67, 68, 73, 80]. There have recently been several efforts based on position-sensitive avalanche photodiodes (APDs) that have shown good position resolution in reading out long, narrow scintillation crystals [61, 64] and 3 –4mm depth resolution in 1mm x 20mm crystal [64].
Indeed, some instruments are even proposing stacked detectors of silicon photomultipliers (SiPMT) and continuous LSO [81]. We note that SiPMTs are extremely promising devices for achieving high spatial resolution (including DOI) but their practical application in high resolution scanners awaits the development of dense, reliable arrays and readout electronics (no small feat given the length of time it took to develop even low-gain APD arrays).
Another issue affecting high resolution PET detectors is the fact that the most prevalent interaction of 511 keV photons in any detector is scatter (Compton and coherent): 59% for BGO, 67% for LSO, 82% for NaI(Tl). After the initial scatter, the photon may be absorbed elsewhere in the detector resulting in mis-positioning (intercrystal scatter or ICS), or it may escape resulting in loss of efficiency. ICS only has a small effect on the width of the central “spike” of the CLRF. The more insidious effects are tails several millimeters long on the response. These compromise the noise performance of the scanner and may not be apparent from the viewpoint of the FWHM of the reconstructed point or line response. While our investigations of positron range could likely deal with these response tails, it would be better if they were absent (assuming that suitable high resolution block detectors with good DOI resolution were even available for the high magnetic field environment).
With the ongoing developments in detectors including the infusion of new technologies such as SiPMTs, semiconductor detectors, and positioning methods having good ability to identify the site of the initial photon interaction in 3D, it is highly likely that within a decade, PET detector resolution will not be an issue with coincidence line responses of <1mm FWHM (including acolinearity) the norm across the entire FOV. We are not there yet, however. Existing small animal PET instruments as well as those to emerge from research labs in the short-term are not the best or even particularly good choices for our investigations aimed at controlling the flight of the positron. What is required is sub-millimeter spatial resolution over the FOV, sufficient DOI resolution, freedom from ICS effects, and of course magnetic field compatibility.
For the silicon-pad detectors we propose for this investigation, positron-range in many cases will be the dominant influence on resolution. This is because of their outstanding DOI resolution, their clean resolution offered by escape of the scattered photon from the detector, and their coincidence line response resolution of
0.67mm FWHM (1.4mm pads / √24 x 2.35 for the equivalent Gaussian or FWHM, 0.7mm for the triangular response)., Moreover, we have recently developed detectors having 1mm x 1mm x 1mm pads where this will certainly be the case.
Why not use “existing” PET/MRI hybrids for these measurements? A number of devices have been proposed over the years and several prototypes constructed. For example, Raylman et al.
report on a device using remote PSPMTs and two opposed arrays of 2mm x 2mm x 10mm crystals [111,112]. A similar approach has
PHS 398/2590 (Rev. 09/04, Reissued 4/2006) Page Continuation Format Page
Principal Investigator/Program Director (Last, First, Middle
): Kagan, Harris been reported by the UC Davis group except that high-gain PSAPDs are coupled to an 8x8 element array of
1.43mm x 1.43mm x 6mm LSO crystals through optical fibers [113]. A proposed instrument consisting of a split-solenoid MRI magnet and arrays of LSO scintillators coupled to outboard PSPMTs is described in [114].
And Brookhaven is investigating placement of their RatCAP APD-based scanner within a small-bore MRI magnet [115]. There are other examples as well.
These are important 1 st generation devices aimed at further understanding the rationale for combining MRI and
PET as well as the requirements for such instruments. They are excellent for these purposes. But, virtually all use small ring diameters and relatively thick crystals in coarse-grained arrays with no DOI resolution. One of the requirements of our investigation is the measurement of range effects of the same order as
—or smaller than —the spatial resolution of these 1 st generation instruments. Because of this, the instrument we propose for the measurements as noted above and in Section C.1 is more suitable than existing PET/MRI devices.
Be that as it may, it is likely that in the near future there will be many usable methods of obtaining submillimeter resolution in PET. The major source of resolution loss for all will then be the range of the positron in tissue . In order to study this issue further, and to evaluate the effectiveness of strong magnetic fields in improving spatial resolution, we chose to use a PET instrument, which is capable of easily achieving submillimeter resolution due to its DOI sensitivity, small effect from acolinearity, and small detector elements as shown in Section C.1.
Positron range in water and tissue [Revised]
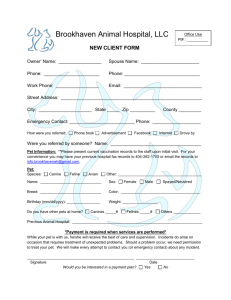
The range of a positron depends on its energy and the composition through which it travels. Several authors have studied positron range in water and lung tissue using Monte Carlo simulation methods [2, 3]. Some of the results for different positron-emitters are given in Table 1. As a measure of positron range we list both the
FWHM and FWTM of the x coordinate of the annihilation point distribution. In cases marked with an asterisk we have used a linear approximation to scale the Levin and Hoffman data taking into account the maximum positron energy. As expected, the range depends on the tissue the positrons travel through decreasing with density and increases with increasing positron energy. The values in Table 1 were obtained without a magnetic field. In order to study the effects of a magnetic field on the positron range we used EGS-4 to develop our own simulation. Our EGS-4 simulation tracks the positrons in three dimensions and the resulting distribution of annihilation points was projected on the image plane to assess their impact on the spatial resolution. Our results for no magnetic field are presented in the last three columns of Table 1. There is generally good agreement between the three studies. Sanchez, Andrea and Larsson [93] found that the full width at 10%
(FWTM) or 20% of the maximum of the annihilation point distributions yielded more appropriate values to assess the effect of the positron range on the overall spatial distribution of the PET system.
PHS 398/2590 (Rev. 09/04, Reissued 4/2006) Page Continuation Format Page
Principal Investigator/Program Director (Last, First, Middle
): Kagan, Harris
Isotope
F-18
C-11
N-13
O-15
Ga-68
Max. Positron
Energy [KeV]
635
970
1190
1720
1899
Water
Lung
Water
Lung
Water
Lung
Levin and Hoffman [2]
Tissue
FWHM
[mm]
FWTM
[mm]
Sanchez, Andreo, Larsson
[93]
Tissue
FWHM
[mm]
FWTM
[mm]
Our Results (EGS 4)
Tissue
FWHM
[mm]
FWTM
[mm]
Water
Lung
Water
Lung
0.10
0.19
1.03
1.86
Water
Lung
Water
Lung
0.19
0.37
0.28
0.52
0.91
2.70
1.70
4.90
Water
Lung
Water
Lung
0.16
0.28
0.24
0.40
0.96
2.64
1.70
4.88
0.28
0.50
0.6*
2.53
4.14
4.6*
Water
Lung
Water
Lung
Water
Lung
0.33
0.62
0.41
0.83
0.49
0.98
2.12
6.50
3.10
10.10
3.70
11.50
Water
Lung
Water
Lung
Water
Lung
0.32
0.48
0.44
0.80
0.64
1.28
2.32
6.36
4.00
10.47
4.28
12.06
Water 0.8* 8.2* Water 0.76 Water 0.83 6.90
Tc-94m 1428
Lung Lung 1.43 Lung 1.44 28.0
Table 1 Simulated positron range in water and lung tissue for different positron-emitters.
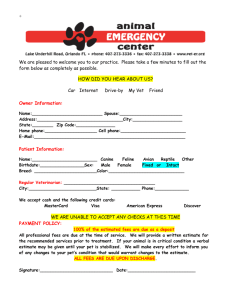
It should be evident that as the spatial resolution in PET improves into the deep sub-millimeter region positron range effects will first become visible first as tails and then in the core of the resolution function. Sanchez et al.
[93] studied the relative spatial resolution loss due to the positron distance of flight as function of the overall
Figure 1: Relative loss in spatial resolution due to the positron distance of flight [93]. spatial resolution of the PET system. Figure 1 (taken from [93]) clearly shows the increasing impact of the positron range as the system resolution improves even for low energy emitters such as F-18. As PET cameras
PHS 398/2590 (Rev. 09/04, Reissued 4/2006) Page Continuation Format Page
Principal Investigator/Program Director (Last, First, Middle
): Kagan, Harris approach sub-millimeter resolution the effect of the positron range becomes important not only for high energy positron emitters such as Ga-68 but also for F-18 in particular when imaging lung tissue.
Opportunities to improve spatial resolution [Revised]
We have outlined the case that positron range will become the limiting factor to good (sub-millimeter) image quality in PET systems designed with the following characteristics: small size to reduce non-collinearity effects, high detector spatial resolution for good image resolution, and segmentation for DOI sensitivity. One clear way of reducing positron range is to embed the PET FOV in a strong magnetic field thereby generating a Lorentz force on the positron causing it to spiral around the magnetic field direction. If multiple scattering of the positron in tissue is not too large then the resulting helical motion should reduce the effective positron range in directions perpendicular to the applied magnetic field. Such a scenario has been investigated by Hammer,
Raylman and Christensen [1]. They found that the simulation and experiment agreed and some improvement
(27% in FWHM transverse to the magnetic field) was possible with high field (10T) for Ga-68. However the inherent spatial resolution of the detector system (~5mm) and small bore of the magnet produced results which clearly need to be extended to the state-of-the-art of scanners today. In particular, their observed small range reduction (2% in FWHM) with 10T for F-18 should be verified given that modern scanners have 4 times better spatial resolution.
Based on the work of Hammer, Raylman and Christensen and others the embedding of the PET FOV presents a method for high resolution scanners to achieve sub-millimeter image resolution. Although the sub-millimeter regime has its own peculiarities our initial work (Section C.2) confirms this idea. The significant outstanding issue is that the previous methods only resulted in an improved reconstructed resolution in two dimensions.
We propose a new data acquisition and reconstruction method (Section C.4) that will improve reconstructed resolution in all three spatial dimensions .
Rationale for the Specific Aims: The proposed work and how it moves toward the long-term objective [Revised]
The proposed work involves simulation of the PET performance in a magnetic field, modification of a small high resolution PET scanner which can be operated in a large magnetic field, perform measurements necessary to demonstrate improved resolution in 3D and quantify the increase in performance achievable with magnetic confinement. Each part of this investigation plays a direct role toward the long term objective of sub-millimeter
PET image resolution for small animals.
Work in Aim 1 is necessary for (1) predicting positron range and the effects of the magnetic field on range; (2) performing design studies for the proposed PET measurement device (although these will be straightforward given that a prototype scanner already exists (Section C.1); and (3) for generating Monte Carlo data to compare with measurements conducted in Aim 3. Work here will also model the distribution of Comptonscattering in the object (which will be relatively small due to the slice-collimated geometry of the scanner) so that it can be compensated in the reconstruction.
The high resolution PET measurement device will be constructed in Aim 2. As noted above, it will be based on an existing prototype. The primary work will be repackaging the instrument to eliminate magnetic materials, to allow the entire tomograph to be re-oriented in the large-bore 7T and 3T magnets, and to incorporate new motion controls that will allow 3D data acquisition. Since the PSF induced by positron-range is not a function of the PET device itself, there is great leeway in construction and 3D data acquisition will be performed by scanning a sequence of slices by axially translating the object. Scanner development will proceed in three phases. The first will develop a single-slice 2D tomograph in which only the object is capable of computercontrolled rotation. The second will add axial translation to allow full 3D data acquisition. And in the final phase, additional hardware will be constructed to allow the detectors to rotate around the stationary object.
Because of the incomplete detector ring, some rotation either the object or the detectors will be required to obtain a full dataset for each slice. The ability for independent rotation of each allows maximum flexibility in setting the orientation of the B-field relative to the object. In all three phases, manual re-orientation of the tomograph relative to the field will be possible. Work in Aim 2 will also extend the reconstruction method developed in R01 EB430 to reconstruct 3D data from the scanner. It will additionally be extended to incorporate various positron blurring functions —including those anticipated in 3T and 7T fields—and to implement the reconstruction method presented in Section C.4
PHS 398/2590 (Rev. 09/04, Reissued 4/2006) Page Continuation Format Page
Principal Investigator/Program Director (Last, First, Middle
): Kagan, Harris
The bulk of the experimental measurements aimed at validating our approach will be performed in Aim 3. Both
F-18 and Ge-68 will be used and data will be collected at 0T and at various orientations at 3T and 7T. Various acquisition protocols will be used and results compared with our predictions from Aim 1 as well as with calculations from Aim 4.
There are several reasons for including the bias-variance tradeoff studies in Aim 4. First, they help tie all the work together. If all the models used are accurate depictions of reality then the performance from (1) reconstrudtions of the Monte Carlo data from Aim 1, (2) reconstructions from the measurements in Aim 3, and
(3) predictions from the calculations in Aim 4 should match. Assuming performance predictions match, the second reason for including Aim 4 is that it allows performance of various data acquisition scenarios to be predicted. For example, while we show a composite reconstructoin from simulated data in two orientations in
Section C.4, is it better to split the data acquisition time among more? Does it matter at all? This study allows issues such as these to be examined in detail without incurring charges for unnecessary magnet time. Third, as noted in an earlier section, resolution must often be scrubbed in the image reconstruction process to sufficiently regulate noise. At what reconstructed resolution —if any—does the effect of magnetic confinement offer only marginal gains over no confinement? Or is there nearly always a significant noise advantage?
Obviously, it will depend on the positron energy but these questions can be answered in a well-defined way.
There are numerous other benefits for including such machinery such as the ability to examine the covariance and bias structures arising in the reconstructions.
Unique facilities
Our collaboration has two unique facilities and several strengths which puts us in a unique position to complete the proposed studies. First we have access to large bore 3T and 7T magnets. The 7T magnet (Philips Altera) is part of the new state-of-the-art MRI facility of the Wright Center for Innovation in Biomedical Imaging at The
Ohio State University. Second we have a detector assembly facility for design, layout, construction, testing and repair of state-of-the-art detectors. Our collaboration posseses the unique feature of having the demonstrated ability to construct and repair high resolution silicon detector modules and keep them operating
[84, 85]. Thus we should be able to solve any problems associated with hardware quickly during the study.
Finally our collaboration possesses the imaging knowledge and skills having performed simulation and reconstruction on a variety of geometries and devices. This combination uniquely positions us to perform this study.
PHS 398/2590 (Rev. 09/04, Reissued 4/2006) Page Continuation Format Page