COS318 - Project #4 Preemptive Scheduling Fall 2002 7/2/2016

4/10/2020
COS318 - Project #4
Preemptive Scheduling
Fall 2002
4/10/2020
Overview
Implement preemptive OS with:
All the functionality of preview project’s OS
Additional thread synchronization:
MESA style monitors (condition variables)
Support for a preemptive scheduling:
Implement the timed interrupt handler (irq0)
Enforce all necessary atomicity
4/10/2020
Review -
Processes and Threads
Threads (trusted)
Linked with the kernel
Can share address space, variables, etc.
Access kernel services (yield, exit, lock_*, condition_*,getpid(),*priority() ) with direct calls to kernel functions
Use a single stack while running thread code and kernel code
*Differences from previous project in italics
4/10/2020
Review -
Processes and Threads cont’d
Processes (untrusted)
Linked separately from kernel
Appear after kernel in image file
Cannot share address space, variables, etc.
Access kernel services (yield, exit, getpid,
*priority ) via a unified system call mechanism
Use a user stack while running process code and a kernel stack whilst running kernel level code
*Differences from previous project in italics
4/10/2020
Overview -
Preemptive Scheduler
Initial proc/thread is dispatched at start time
Processes voluntarily stop running by a system call interrupt invoking yield() or exit()
Threads voluntarily stop running by a direct system call invoking yield(), exit() or block()
block() is nested in lock_acquire() or condition_wait()
Proc/threads involuntarily stop running due to a timer interrupt, irq0()
Interrupt/Direct system calls invoke context saves
Scheduler is invoked to save kernel stack, select next available proc/thread from linked & dispatch
*Differences from previous project in italics
4/10/2020
Overview -
System Call Mechanism
Threads can call to system calls (yield(), exit(), lock_*(), condition_*(), getpid(), *priority()) directly
Processes use system call interrupt mechanism to access system services (yield(), exit(), getpid(),
*priority())
Jump table, system_call_entry(), allows access to fixed set of kernel services
Address of jump table is specified in a Interrupt
Descriptor Table (IDT)
IDT’s location (in kernel) is specified to the CPU
Software interrupt 48 (with desired service specified in eax) can then invoke system_call_entry()
syslib.c maps system calls to int 48 with eax argument
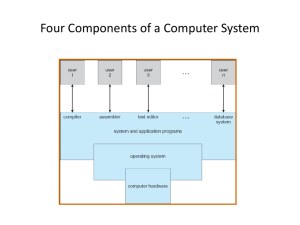
Interrupt Mechanism -
In detail
The following diagram shows how the interrupt mechanism works:
0x1000 IDT irq0() system_call_entry()
4/10/2020
CPU Int 0
Int 32
Int 48
*Every 10ms hardware interrupt IRQ0 invokes Int 32
4/10/2020
Overview -
Context switching
Contexts initialized for each PCB during startup
Unique kernel and user stacks are assigned
Starting addresses are stored
Context (eflags and registers ( including stack)) saved when execution is halted:
For Threads
At start of yield() call before call to schedule()
At end of block() call before call to schedule()
For Processes
At start of system_call_entry() before potential call to
_yield() (and hence to schedule())
For BOTH:
At start of irq0() before call to schedule()
4/10/2020
Overview -
Context switching cont’d
Context is swapped in by dispatcher but not as in the previous project
First time
Set appropriate stack pointer and jump to starting address (as before)
Subsequent times
Restore the kernel_stack saved at start of schedule()
Note that this is different from the stack saved as part of the context (regs.esp).
Let dispatch() return so that the swapped in proc/thread returns from that schedule() call via return address stored on top of the saved stack.
Context is restored by the code following said call to schedule().
4/10/2020
Context Switching Details –
Macros
SAVE_GEN_REGS, RESTORE_GEN_REGS
Saves and restores eax, ebx, ecx, edx, esi, edi, ebp, esp to current_running->regs.eax, ->regs.ebx, etc.
Used in saving/restoring context
SAVE_EFLAGS, RESTORE_EFLAGS
Uses present stack to push and pop the processor status word to and from current_running->regs.eflags
Used is saving/restoring thread context (interrupt mechanism automatically handles eflags for procs)
SWITCH_TO_KERNEL_STACK, SAVE_KERNEL_STACK
Uses current_running->kernel_stack to restore and save the present stack, esp.
Used in schedule()/dispatch(), system_call_entry(), and irq0() (for processes)
4/10/2020
Context Switching Details –
Threads
yield()
Context (eax,ebx,…,esp & eflags ) saved.
Schedule() is invoked and saves kernel_stack before moving to next proc/thread and dispatching
When swapped back in, dispatch returns to address on saved kernel stack, at point after schedule()
Context (eax,ebx,…,esp & eflags ) is restored
Yield returns to address on top of stack (to point after yield call)
block()
PCB is enqueued on lock/condition linked list
Proceeds exactly as for yield()
4/10/2020
Context Switching Details –
Processes
system_call_entry()
eflags and eip are automatically saved because we enter via the interrupt mechanism
Context (register set including esp) is saved.
Switch to kernel stack.
Invoke the desired system call.
If scheduler is invoked (via _yield), it saves kernel_stack before moving to next proc/thread and dispatching (just as for threads)
When swapped back in, dispatch returns to address on saved kernel stack, at point after schedule() in _yield()
_yield() returns into system_call_entry()
The kernel stack is saved
Context (register set) is restored.
‘iret’ is invoked to restore eflags and return to eip automatically saved on stack upon interrupt entry.
4/10/2020
Context Switching Details –
Processes and Threads
irq0() – What you must implement…
eflags and eip are automatically saved because we enter via the interrupt mechanism
Proc/thread context is saved.
Stack change occurs (processes only)
The End of Interrupt (SEND_EOI macro) signal is given to inform interrupt timer to resume.
Scheduling is invoked.
When swapped back in, we return to this point.
Stack save occurs (processes only ).
Proc/thread context is restored.
‘iret’ is invoked to restore eflags and return to eip automatically saved on stack upon interrupt entry.
4/10/2020
Overview -
Thread Synchronization
Only one thread can hold some lock, l, at any one time
Lock is acquired via lock_acquire (l)
If UNLOCKED set to LOCKED
If LOCKED thread is blocked (which places thread in a queue stored in the lock)
Lock is released via lock_release(l)
If queue is empty then set to UNLOCKED
If not empty then unblock (dequeue) a thread which now holds the lock
4/10/2020
Overview -
Thread Synchronization cont’d
Condition variables must be supported as in the course notes. You must implement:
Waiting is accomplished by first acquiring a mutex, m, then invoking condition_wait (m,c)
The mutex, m, is released
The thread then blocks on the condition, c
Execution resumes and attempts to reacquire the mutex, m
Typically, the user code retests the condition….
Signaling and Broadcasting is accomplished via condition_signal(c) and condition_broadcast(c)
Signal should unblock one thread
Broadcast should unblock all threads
4/10/2020
Overview –
Atomic Processes
Easy part:
Implementing irq0() and monitors only requires some
30-40 lines of code
Hard part:
Preemptive scheduling will break everything
irq0() can occur at any point during execution
If lock_* or condition_* are interrupted part way through, failure can result because we assume that these command fully complete once started
Catastrophic results can happen if interruption occurs during kernel services, especially those which modify the
PCB running list (schedule, dispatch, block, unblock)
Solution: Disable interrupts during crucial times
4/10/2020
Overview –
Atomic Processes
Handy Macros
CRITICAL_SECTION_BEGIN – Disables interrupts and increments global variable, disable_count (debug!)
CRITICAL_SECTION_END – Decrements disable_count and enables interrupts if disable_count reached zero
The count should never become negative!
schedule(), dispatch(), block(), unblock() all assert that disable_count > 0 since these kernel function should never be interrupted.
You must manually assure that other critical kernel functions (see upcoming slides) and thread synchronization routines are made atomic
Note, it’s not necessary that disable_count > 1 ever occur
(nested critical sections.) Avoiding this makes life easier.
4/10/2020
Atomicity –
Details
schedule(), dispatch(), block(), unblock() all assert that interrupts are disabled
All entry points to these functions must incorporate
CRITICAL_SECTION_BEGIN
system_call_entry()
Process system call could lead to _yield(), exit() which call to schedule()
yield()
Thread’s direct system call will lead to schedule()
exit()
But only for a thread’s direct call since processes only call here via system_call_entry (test current_running->in_kernel)
irq0()
This results in a call to schedule() for threads and processes
lock_*, condition_*
To ensure atomicity and because can call block(), unblock()
4/10/2020
Atomicity –
Details cont’d
When any block() or unblock() call completes, the interrupts are disabled (before the call, or before dispatch swapped in a newly unblocked thread)
CRITICAL_SECTION_END must ultimately appear after such calls
At end of lock_*, condition_*
FIRST_TIME proc/threads launch directly from the dispatcher which assumes interrupts are disabled
CRITICAL_SECTION_END must appear before jumping to the start address
Non-FIRST_TIME dispatch() calls swap in saved kernel stack and return to begin execution after the schedule() call that caused the context to originally swap out
CRITICAL_SECTION_END must ultimately appear at the end of all eventual context restorations
At end of system_call_entry(), yield() or irq0()
4/10/2020
Atomicity –
Thread Synchronization Functions
As mentioned, lock_* and condition_* must execute atomically
Furthermore, lock_acquire(), lock_release(), condition_*() must disable interrupts while calling to block(), unblock()
All code within these functions should be bracketed within CRITICAL_SECTION_* macros
Difficulties can arise if critical sections become nested when condition_wait() calls to lock_acquire(), lock_release() leading to non-zero disable_count when context restoration completes -- BAD
You may simplify life by defining _lock_acquire(), and
_lock_release(), which are seen only by condition_wait() and which do not invoke critical section macros
Since you disable interrupts at the start of condition_wait() and are assured that block() returns with interrupts disabled everything should work safely.
4/10/2020
Implementation Details -
Code Files
You are responsible for:
scheduler.c
The preemptive interrupt handler should be implemented in irq0() as described previously
All other functions are already implemented.
Atomicity must be insured by (en)(dis)abling interrupts appropriately in system_call_entry(), yield(), dispatch(), exit(), and irq0()
thread.c
Condition variables must be implemented by manipulating locks and the condition wait queue as described
Atomicity must be insured by (en)(dis)abling interrupts appropriately as described
4/10/2020
Implementation Details -
Code Files cont’d
You are
NOT
responsible for:
common.h
Some general global definitions
kernel.h, kernel.c, syslib.h, syslib.c
Code to setup OS & process system call mechanism
util.h, util.c
Useful utilities (no standard libraries are available)
th.h, th1.c, th2.c, process1.c, process2.c
Some proc/threads that run in this project
thread.h, scheduler.h, creatimage, bootblock
The given utils/interfaces/definitions
4/10/2020
Implementation Details -
Extra Credit