Motion Planning for Tower Crane Operation
advertisement

Motion Planning for
Tower Crane Operation
Motivation
Tower crane impacts the schedule greatly
Safety of tower crane operation is critical
Major Challenges
Schedule
Predict? Guess?
Special Projects
Complex projects
Fast-track projects
Critical working space constrains
Tower Crane Operation
T1
Secure structure
element to hook
T2
T3
Move piece from
original location
to final position
Holding time
T4
Repositioning
of crane to
next piece
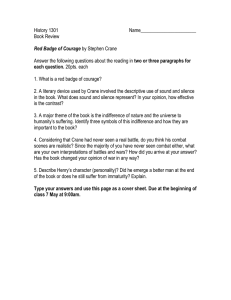
The Crane
Configure Space vs World Space
Θ1
d2
d3
{B}
β
Θ4
{H}
y
z
γ
x
α
c1c4 s1s4
s c c s
T (1 , d 2 , d 3 , 4 ) 1 4 1 4
0
0
s1c4 c1s4
c1c4 s1s4
0
0
0 d 2 s1
0
d 2 c1
1 d3
0
1
Planning Algorithm (RRT)
Goal
While (MaxStep is not reached)
1. Expand Tree_1 (init) & Tree_2 (goal)
2. Connect check
if connected, then Generate a Path
else goto 1.
Expand:
1.
2.
3.
4.
Create a random node
find nearest node
try to add nearest node to tree
try to add the random node the tree
Connect:
Init
1. Can the new added nodes See any of the
nodes from another tree? (collision detection
as a straight line)