A Simplified Method for Dynamic Response of Flexible Pavement and Applications in Time domain Backcalculation
advertisement

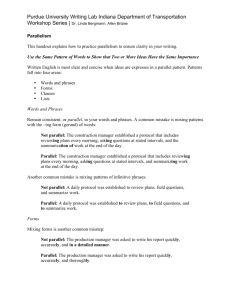
The Journal of American Science, 2(2), 2006, Ji, et al, Method for Dynamic Response of Flexible Pavement A Simplified Method for Dynamic Response of Flexible Pavement And Applications in Time domain Backcalculation Yigong Ji*, Fuming Wang**, Maotian Luan ***, Zhongyin Guo**** * Michigan State University, East Lansing, MI 48824-1226, USA, jiyigong@msu.edu ** School of Hydraulic & Environmental Engineering, Zhengzhou University, Zhengzhou, Henan, China, fuming@zzu.edu.cn *** Department of Civil Engineering, Dalian University, Dalian, Liaoning, China, mtluan@dlut.edu.cn **** School of Transportation Engineering, Tongji University, Shanghai, China, zhongyin@mail.tongji.edu.cn Abstract: A new solution and its associated computer program, named SSSM-SIM, for dynamic back-calculation of multi-layered flexible pavement parameters under FWD tests are presented. A new simplified approach based on spline semi-analytical method is proposed for dynamic response analysis of a visco-elastic layered flexible pavement. The advantage of the new solution is that it enables a three-dimensional problem to be simplified to a onedimensional numerical problem; therefore the large number of computational cost and storage is greatly reduced. Both frequency and time domain solutions are developed based on this method. Furthermore, in the inverse process of identifying parameters, the data of falling weight deflectometer (FWD) and the system identification method are jointly used in conjunction with the proposed procedure for estimating material properties from responses of a viscoelastic layered flexible pavement. The analysis is based on dynamic time domain fitting in a series of a period of time. The theoretical results show that (1) system identification method is an efficient back calculation approach that can converge to a solution quickly in a wide range of initial values of modulus, and (2) good agreement between measurement and prediction can be achieved. Based on the above work, the deflection data from two in-situ falling weight deflectometer (FWD) tests are used to determine the flexible pavement material properties. It has been shown that the backcalculation program can be adapted to these situations. The reasonable results can be obtained by comparing to other backcalculation method. [The Journal of American science. 2006;2(2):70-81]. FWD response time histories are often truncated in time (30 or 60 millisecond) and not tend to zero at the end of the time window. Therefore, the FWD field data in frequency using FFT scheme will be fundamentally changed by these two reasons (4,7). Comparing to frequency backcalculation method, backcalculation analysis in time domain has advantages, which does not consider the truncation problem and data drifting in the end of time history (4,7). Therefore, it will provide a reasonable way to backcalculate the pavement parameters. However, dynamic time domain analysis is time-consuming; therefore backcalculation in time domain requires much more time comparing to frequency domain backcalculation. In addition, in the extraction of FWD time history, Chatti et al (8)use the time lag and peak time to backcalculate the modulus, damping and thickness; Dong et al (9) use period time to backcalculate layer modulus and viscous coefficients in assumption of three dimensional finite element pavement model; and Uzan (7) use the full time history to backcalculate AC creep compliance and layer modulus. This paper presents a dynamic time domain backcalculation program, SSSM-SIM, in which spline semianalytical method is used for calculating dynamic re- 1. Introduction Pavement evaluation is essential for maintaining exsisting pavement and rehabilitating the deteriorating highway infrastructure. Comparing to destructive test, nondestructive testing (NDT) is fast, economic, accurate in evaluating the structural capacity. The Falling Weight Deflectometer (FWD) test is the most popular NDT equipment. The considerable efforts have been made over the decades to interpret FWD deflection time history for determining the layer parameters, such as layer module, damping ratio, thickness and so on. Over the years, many backcalculation programs have been developed to interpolate the FWD data, including both static and dynamic assumptions. However, most popular backcalculation programs are based on the static assumption, which use only peak values of the FWD response time histories. Dynamic backcalculation is more attractive than static backcalculation since it considers dynamic effects of pavement and dynamic characteristics of FWD. At present, based on single frequency or multi-frequency fitting, several dynamic backcalculation computer programs that have been developed such as PAVE-SID (1), BKGREEN (2), SSSM-BACK (3), DYNABACK-F (4), and LAMDA (5,6). However, http://www.sciencepub.org 70 editor@sciencepub.net The Journal of American Science, 2(2), 2006, Ji, et al, Method for Dynamic Response of Flexible Pavement sponse of visco-elastic multi-layered pavement system. By virtue of the data measured from in-situ Falling Weight Deflectometer (FWD), the proposed procedure in conjunction with a system identification method and the singular value decomposition (SVD) method are applied to backcalculate material properties of pavement. Verification of the proposed methodology is made through a synthetic data analysis. Finally, a comparison of the backcalculated moduli and damping ratio from two sets of field data with results from other developed backcalculation programs is also presented. The accuracy and consistency of backcalculated results from field data indicate that the proposed method may be considered as an applicable method to evaluate the material parameters of pavement structure. R In which X mn , Ymn , Z mn represents Fourier's series terms expressed for horizontal and vertical loading by Ji et al. (11), X mn Ymn 2.1 Modeling Viscoelasticity Z mn In visco-elastic theory, behavior of materials is generally expressed in terms of complex modulus coupling modulus and viscous damping together. The modulus and damping ratio are independent on frequency in soils, but are frequency dependent on asphalt concrete (10). For simplicity reason, it is assumed that all parameters are frequency independent, which are defined as below Ly L nπ y mπ x x 2 2 sin cos (5) Lx Ly Ly L nπ y mπ x x 2 2 (6) sin cos Lx Ly Ly L nπ y mπ x x 2 2 (7) sin sin Lx Ly amn a0 a1 a N T , bmn b0 b1 bN T , T and cmn c0 c1 c N are variables to be determined, 0 1 N represent simple spline function matrix with its component as following (Ji et al 1999): (1) where i 1 , E is the Young’s modulus, and is the hysteretic damping ratio. z k hk k 1,k layer, N is the total number of sub-layer. Simple spline function is expressed as z 1 , z 1, 0 ; (9) 1z 1 z , z 0, 1; 0 , z 1, 1 Equation (2), (3) and (4) can be written in matrix form u R S v Nmn d mn eit N d eit (10) w m 1 n 1 The stresses of soil can be given (11) D DBdeit a The square loading area is of dimension a in both x- and y-directions, respectively. At two vertical sides, the boundaries are placed sufficiently far away from the loading area so that the reflected radiating stress waves from the boundaries are damped out before reaching the reign of interest. The displacement functions u , v , w for layered half-space with any number of nodal surface are represented by the product of simple spline functions and Fourier’s series. S u X mn amn e it u 0 e it (2) v Ymn bmn e it v0 e it (3) k 1,2 N (8) In which hk is the thickness of the k-th sub- 2.2 Spline Semi-Analytical Procedure for steady state solution of Layered pavement System Refer to Figure 1; a non-homogenous visco-elastic pavement system on rigid base is subjected to a uniformly distributed surface load with unity intensity q 12 e it . R (4) m 1 n 1 2. Dynamic Pavement Response E * E 1 2i E1 iE 2 S w Z mn cmn e it w0 e it In which B is the strain-displacement matrix. D can be expressed m 1 n 1 R S m 1 n 1 http://www.sciencepub.org 71 editor@sciencepub.net The Journal of American Science, 2(2), 2006, Ji, et al, Method for Dynamic Response of Flexible Pavement d1 d 2 d D 3 0 0 0 d2 d3 d1 d3 d3 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 G 1 0 0 0 1 0 0 0 1 In general, it can be considered that the load frequency above 75 Hz will not contribute the transient response in time domain solution (8). The details of the time-domain response computations are as follows: (12) 1. 2. d1 21 (1 2 ) , d 2 d 3 (1 ) , is soil Poisson's ratio, G is In which 3. shear modulus for every layer. According to complex damping principle, horizontal and vertical dynamic responses can be obtained by solving Lagrangian equations of the system. Because of the 4. , orthogonality of Fourier s series X mn , Ymn , Z mn , all terms will be uncoupled and each term can be analyzed separately. Therefore, dynamic equations can be expressed in the following form while the time factor eit is removed M 2 mnmn 3. System Identification Method for Pavement Parameter Backcalculation In this part, the system identification technique (14), in conjunction with the mechanical model of pavement structure and FWD test data, is employed to estimate material parameters of different layers. It is implemented by minimizing a relative error function that quantifies the difference between the computed deflection by the proposed procedure for dynamic response of layered system and the experimentally derived deflection from FWD testing data. For pavement system, two types of material parameters, i.e., modulus and damping ratio, are to be identified. The flowchart of this procedure is given in Figure 2. Assuming that the model of pavement can be defined by elastic modulus and damping ratio of all layers under consideration with the total number 2N of parameters, in the time of t i , the deformation vector of the system 1 2i K mnmn d mn f mn (13) In which Ly N Lx M mnmn k N mn N mn dxdydz k 1 2 Ly Lx 2 hk Ly N T 2 2 Lx K mnmn Bmn DBmn dxdydz k 1 2 Ly Ly N Lx 2 hk T 2 2 Lx f mn N mn a1 dxdydz k 1 2 Ly hk 2 2 Lx T 2 2 In which k is the density of the k-th layer. circular frequency is 2.3 Time Domain solution of Layered Pavement System W c will be determined by W c f ( E1 , 1 , E 2 , 2 , , E N , N , t i ) (14) The above spline semi-analytical method is based on the frequency domain analysis method. In order to calculate the time response of FWD, the following procedure will be complemented. First, the load time history is transformed to the complex load in frequency-domain using the Fast Fourier Transform (FFT). Second, unit steady state response is calculated in each frequency from equation (4). Third, the complex load and unit steady state response are multiplied to obtain the steady state response of the pavement due to the complex load in the frequency domain. Last, the response in the frequency domain is re-transformed to time domain using the inverse FFT. In order to reduce the computational effort of time history, an interpolation scheme proposed by Tajirian (12) can be used for saving computing time. http://www.sciencepub.org The computer program SSSM is used to compute the unit steady state response of the pavement at sixteen frequencies (from 0., 4.88 to 73.24 Hz). The time history of the FWD load is transformed to complex load in the frequency domain using the FFT. The steady state deflections of pavement in the frequency domain are obtained by multiplying the complex load and unit steady state response in the frequency domain. The complex steady state response of pavement is transformed to obtain the deflection time histories in the time domain. Then the data of the j-th sensor of the FWD system is expressed as W jc f j ( E1 , 1 , E2 , 2 ,, E N , N , t i ) If any function f j ( E1 , 1 , E 2 , 2 , , E N , N , t i ) is expanded using a Taylor’s series in the vicinity of E and β in a given time of t i , the error function will be given as following while neglecting higher order terms based on modified Newton's iteration procedure e j f j E E, β β f j E, β f E E f β (15) f j f j f j f j E1 1 E N N E1 1 E N N 72 editor@sciencepub.net The Journal of American Science, 2(2), 2006, Ji, et al, Method for Dynamic Response of Flexible Pavement Ei 1 Ei Ei For the system with s sensors, governing equations can be established F ti Xti eti (16) In which F is called as the sensitivity matrix at t i , difference vector between measured deformations and computed deformations of the system at t i , Et E1 1 E N N T et e1 e2 es T i RMS i Ft i W1 1 W 2 1 W1 N W 2 N t 4.1 Frequency Domain Solution In order to verify the frequency domain solution, this paper demonstrates the numerical accuracy through comparing SSSM results with published deflection data by the GREEN program (2). A three-layer pavement system resting over a subgrade is subjected to a 44.5 kN (10,000 lb) load on a 0.3 m diameter plate. The layer properties of the pavement layer are presented in Table 1. According to the exited result (11), the dimensions of Lx 12 m , Lx 12 m , H 9 m , Fourier’s series domain solution. The partial derivatives in the gradient matrix can be calculated numerically by using 2N+1 runs of SSSM computer program. At the same time, the governing equations at any other time point t i 1 can be established, therfore the total gov- R 50 , S 50 and 15 sub-layer element are selected for the following analysis. The dynamic deflections at offset distances of 0, 0.225, 0.300, 0.525, 0.750 and 1.350 m were calculated using SSSM and GREEN. Figure 3 shows the results for two different frequencies: 0.25 and 8 Hz. Excellent agreement exists at both frequencies. It can be concluded that the program SSSM is suitable as a forward program. erning equations can be expressed as F total E etotal (17) In which e e F F F F etotal e T ti T T t i 1 T tn T ti ti 1 tn n is the number of selected time point that be used for 4.2 Theoretical Bakcalculation Analysis Synthetic Data minimization. Equation (17) can be rewritten as T T etotal Ftotal Ftotal E Ftotal Synthetic FWD data were generated for hypothetical pavement structures consisting of asphalt, base and subgrade layers using the SSSM computer program, and it is showed in Figure 3. The pavement profiles are given in Table 2. The computed vertical displacement time histories obtained from the SSSM program were used as input for the backcalculation. Seven time histories were computed at the locations r = 0, 0.305, 0.457,0.610, 0.914, 1.219 and 1.524 m from the load. The FWD loading is applied on a square area with a side length of 0.266 m, according to equivalent circular FWD load, and time step is 0.0002 second. (18) Solving this equation (18), the revised moduli and damping ratio are obtained from Ei 1 Ei Ei (19) Equation (17) may be of ill condition from a mathematical viewpoint; therefore the singular value decomposition (SVD) technique (14) is used to solve this equation. The coverage criteria can be defined as http://www.sciencepub.org w mj is the measured deflection, and wcj is 4. Numerical Examples is created using a time i 2 100 % (21) the calculated deflection. W s N s is sensor number. The sensitivity matrix F m c 1 s n w j w j n s i 1 j 1 w m j In which W s 1 (20) In which, 1 0.01 . The combined root mean square (RMS) is calculated using the following equation: E represents parameter vector at t i , and e is the W1 E 1 W 2 E1 W s E1 1 73 editor@sciencepub.net Life Science Journal, 2(1), 2005, Ji, et al, Method for Dynamic Response of Flexible Pavement Layer Name AC Base Subbase Subgrade Table 1. Profile used for comparing SSSM and GREEN solutions Thickness (mm) Mass density ( kg/m 3 ) Poisson Ratio Damping Ratio 0.762 2242 0.35 0.0 0.152 2002 0.40 0.0 0.305 2002 0.40 0.0 1762 0.45 0.0 Modulus (MPa) 2069 310.3 144.8 51.71 Table 2. Pavement profiles for synthetic data Layer Name AC Base Subgrade Thickness (m) 0.203 0.254 Mass density ( kg/m 3 ) Poisson Ratio 0.3 0.35 0.45 2322 2162 2001 Damping Ratio 0.05 0.03 0.02 Modulus (MPa) 2068 310 52 Table 3. Pavement profiles for field data Test Site Layer Name Thickness (m) Unit Weight ( kg/m 3 ) Poisson’s Ratio Kansas AC Base Subgrade 0.287 0.152 2322 2162 2002 0.3 0.35 0.45 Texas AC Subgrade Stiff layer 0.203 1.691 2322 2162 2322 0.3 0.35 0.25 Table 4. Comparison of different backcalculation results Using field data from site in Kansas True Value Seed Value SSSM-SIM DYNABACK-T Static Backcalculation (MICHBACK)* Dynamic Backcalculation AC modulus (MPa) Unknown 2413.8 3240.7 3080.0 3306.2 AC damping ratio Unknown 0.2 0.25 0.15 N/A Base modulus (MPa) Unknown 137.9 43.9 37.5 29.3 Base damping ratio Unknown 0.1 0.32 0.22 N/A Subgrade modulus (MPa) Unknown 69.0 489.7 290.3 367.0 Subgrade damping ratio Unknown 0.1 0.20 0.19 N/A RMS — — 10.73% 5.85% N/A http://www.sciencepub.net editor@sciencepub.net The Journal of American Science, 2(2), 2006, Ji, et al, Method for Dynamic Response of Flexible Pavement Table 5. Comparison of different backcalculation results using field data from site in Texas SSSM-SIM DYNABACK-T Static Backcalculation (MICHBACK) 400 237.4 262.8 201.7 Unknown 0.05 0.21 0.14 N/A Base modulus (MPa) Unknown 40 29.6 24.7 21.9 Base damping ratio Unknown 0.025 0.17 0.12 N/A Subgrade modulus (MPa) Unknown 400 49.0 4000 58.5 Subgrade damping ratio Unknown 0.02 0.05 0.02 N/A RMS — — 8.0% 5.8% N/A True Value Seed Value AC modulus (MPa) Unknown AC damping ratio Dynamic Backcalculation h1 Load=eiwt /a2 a x y a hk H z Rigid layer Figure 1. Multi-layered pavement system http://www.sciencepub.org 75 editor@sciencepub.net The Journal of American Science, 2(2), 2006, Ji, et al, Method for Dynamic Response of Flexible Pavement FWD Load Deflection Unknown Pavement System (Measured) Error Deflection Visco-Elastic Pavement Model (Calculated) E and Parameter Adjustment Algorithm 0.001 0.001 0.0008 0.0008 Deflection (mm) Deflection (mm) Figure 2. System identification method 0.0006 0.0004 0.0002 0.0006 0.0004 0.0002 0 0 0 0.2 0.4 0.6 0.8 1 1.2 1.4 0 0.2 0.4 Distance (m ) GREEN in 0.25 Hz 0.6 0.8 1 1.2 1.4 Distance (m ) SSSM in 0.25 Hz GREEN in 8 Hz SSSM in 8 Hz 400 350 300 250 200 150 100 50 0 -50 0 Sensor 1 Sensor 5 700 600 500 Load (kPa) Deflection (Micron) Figure 3. Comparisons of steady state response between SSSM and GREEN computer programs 400 300 200 100 20 40 Tim e (m s.) Sensor 2 Sensor 3 Sensor 6 Sensor 7 60 0 -100 0 Sensor 4 20 40 Time (ms.) Figure 4. FWD load and time history using theoretical bakcalculation http://www.sciencepub.org 76 editor@sciencepub.net 60 The Journal of American Science, 2(2), 2006, Ji, et al, Method for Dynamic Response of Flexible Pavement Ratio of Estimated/Exact Ratio of Estimated/Exact 1.2 1 0.8 0.6 0.4 0.2 1.2 1 0.8 0.6 0.4 0.2 0 0 0 2 4 6 0 8 2 Iteration Num ber AC Modulus base Modulus 4 6 8 Iteration Num ber subgrade Modulus AC Damping base Damping subgrade Damping (a) Seed value = 10% of true value 20 Ratio of Estimated/Exact Ratio of Estimated/Exact 3 2.5 2 1.5 1 0.5 0 15 10 5 0 0 2 4 6 8 10 0 2 Iteration Num ber AC Modulus base Modulus 4 6 8 10 Iteration Num ber subgrade Modulus AC Damping base Damping subgrade Damping 5 4 Ratio of Estimated/Exact Ratio of Estimated/Exact (b) Seed value = 200% of true value AC Modulus base Modulus subgrade Modulus 3 2 1 0 0 2 4 6 8 10 9 8 7 6 5 4 3 2 1 0 AC Damping base Damping subgrade Damping 0 10 2 4 6 8 Iteration Num ber Iteration Num ber (c) Seed value = 500% of true value Figure 5. Convergence procedures of modulus and damping ratio using different seed http://www.sciencepub.org 77 editor@sciencepub.net 10 The Journal of American Science, 2(2), 2006, Ji, et al, Method for Dynamic Response of Flexible Pavement 120 100 80 60 40 20 0 -20 -40 Deflection (Micron) Deflection (Micron) 150 100 50 0 -50 0 20 Sensor 1 Measurment Sensor 1 SSSM-SIM 40 0 60 T ime (ms) Sensor 1 DYNABACK-T 20 40 Sensor 2 Measurment Sensor 2 SSSM-SIM (b) 100 80 80 60 Deflection (Micron) Deflection (Micron) (a) 60 40 20 0 -20 40 20 0 -20 -40 -40 0 20 40 0 60 T ime (ms) Sensor 3 DYNABACK-T Sensor 3 Measurment 20 40 60 T ime (ms) Sensor 4 DYNABACK-T Sensor 4 Measurment Sensor 4 SSSM-SIM Sensor 3 SSSM-SIM (c) (d) 80 50 60 40 Deflection (Micron) Deflection (Micron) 60 T ime (ms) Sensor 2 DYNABACK-T 40 20 0 -20 30 20 10 0 -10 -20 -40 0 20 40 0 60 T ime (ms) Sensor 5 DYNABACK-T Sensor 5 Measurment 20 40 60 T ime (ms) Sensor 6 DYNABACK-T Sensor 6 Measurment Sensor 6 SSSM-SIM Sensor 5 SSSM-SIM (e) (f) 25 20 15 10 5 0 -5 -10 -15 Deflection (Micron) Deflection (Micron) 20 15 10 5 0 -5 -10 0 20 Sensor 7 Measurment 40 0 60 T ime (ms) Sensor 7 DYNABACK-T 20 Sensor 8 Measurment Sensor 7 SSSM-SIM 40 T ime (ms) Sensor 8 DYNABACK-T Sensor 8 SSSM-SIM (g) (h) Figure 6. Comparisons of measured and simulated deflection time histories for site in Kansas: (a) sensor 1 (b) sensor 2 (c) sensor 3 (d) sensor 4 (e) sensor 5 (f) sensor 6 (g) sensor 7 (h) sensor 8. http://www.sciencepub.org 78 60 editor@sciencepub.net The Journal of American Science, 2(2), 2006, Ji, et al, Method for Dynamic Response of Flexible Pavement 200 340 320 Deflection (Micron) Deflection (Micron) 360 300 280 260 240 220 200 180 160 140 120 100 16 18 20 Sensor 1 Measurment Sensor 1 SSSM-SIM 22 24 16 T ime (ms) Sensor 1 DYNABACK-T 18 Sensor 2 Measurment 20 Sensor 2 SSSM-SIM (b) 100 55 90 50 Deflection (Micron) Deflection (Micron) 24 T ime (ms) Sensor 2 DYNABACK-T (a) 80 70 60 50 40 45 40 35 30 25 20 16 18 20 Sensor 3 Measurment 22 24 16 T ime (ms) Sensor 3 DYNABACK-T 18 Sensor 4 Measurment Sensor 3 SSSM-SIM 20 22 24 T ime (ms) Sensor 4 DYNABACK-T Sensor 4 SSSM-SIM (c) (d) 25 Deflection (Micron) 35 Deflection (Micron) 22 30 25 20 15 10 5 0 20 15 10 5 0 16 18 20 Sensor 5 Measurment 22 24 16 T ime (ms) Sensor 5 DYNABACK-T 18 Sensor 6 Measurment Sensor 5 SSSM-SIM 20 22 T ime (ms) Sensor 6 DYNABACK-T Sensor 6 SSSM-SIM (e) (f) Figure 7. Comparisons of measured and simulated deflection time histories for site in Texas: (a) sensor 1 (b) sensor 2 (c) sensor 3 (d) sensor 4 (e) sensor 5 (f) sensor 6. http://www.sciencepub.org 79 24 editor@sciencepub.net The Journal of American Science, 2(2), 2006, Ji, et al, Method for Dynamic Response of Flexible Pavement The SSSM-SIM program is performed to identify layer moduli and damping ratio, that are the total six parameters. The seed values are assumed to be 10%, 200% and 500% of the true value, respectively. Figure 5 shows the dynamic backcalculation iteration vs. ration between identified parameter and true values. The following observations are made from these figures: Curve of damping ratio is more fluctuate than that of moduli in backcalculation procedure, therefore damping ratio is more sensitive than moduli, and therefore it is more difficult to identify than moduli. The SSSM-SIM program is not essentially influenced by seed value, and it can provide coverage of true value in limited iterations steadily, therefore it is a robustness of backclaculation solution. Seed value will affect the iteration times, and reasonable estimated seed value will decrease the iteration times. because the backcalculation itself is a nonlinear solution, therefore more reasonable and more accurate dynamic model is encouraged to use to ensure that reliable results can be made. There are small deviations between the measured and simulated time histories, so the point to point backcalculation method should be better than the peak deflection and time lags, since it considers more point’s information. The simulated deflection time histories of both SSSM-SIM and DYNABACK-T program are negative at the beginning. This may be due to the hysteretic damping assumption and calculation errors at the beginning of IFFT procedure, which is similar to errors of time domain analysis in the beginning. Therefore, time history around the peak deflections, not the entire time history, is recommended to use in backcalculation. 5. Conclusions 4.3 Field Data Aplication This paper presents a simplified approach based on spline semi-analytical method for analysis of dynamic response of pavement. In the proposed method, the pavement is divided into a number of sub-layers; the displacement functions are expressed as the product of basic spline function and Fourier's series, which enables to simplify a three-dimensional problem to a onedimensional numerical problem. This paper also discussed the backcalculation in time domain fitting base on the system identification method (SIM). The numerical regularization technique, named SVD is explored for ensuring better stability of the inversion procedure in iterations. The numerical results show that the system identification method is an efficient backcalculation approach that can provide coverage to a solution quickly in a wide range of initial values of module. The reasonable and acceptable results can be obtained when using field data from FWD. Therefore a practical and versatile analysis access is established for the study on evaluation of capacity of flexible pavement. The field deflection data from Kansas and Texas were select from Chatti et al (8), in which the DYNABACK-T was developed using peak deflection and time lags to identify the pavement parameter and MICHBACK program was used to verify. For the purpose of comparison, results of SSSM-SIM, DYNABACK-T and MICHBACK are listed in Table 5 for Kansas and Table 6 for Texas. The FWD data consists of eight deflection time histories for sensors located at r = 0, 0.203, 0.304, 0.457, 0.609, 0.914, 1.219 and 1.524 m from the load, deflection time histories are used for minimization from 23 to 35 millisecond. The data from the site in Texas contain six deflection time histories for sensors located at r = 0, 0.304, 0.609, 0.914, 1.219 and 1.524 m from the load, the time history is used from 16 to 24 milliseconds. In order to compare the difference between SSSMSIM and DYNABACK-T, the measured and predicted full deflection time histories are shown in Figures 6 for the Kansas data, while the measured and predicted deflection time histories in specific input time period are shown Figure 7 for the Texas data. The following observations are made from these figures: For both the Kansas and Texas site, both SSSM-SIM and DYNABACK-T program can generate the similar response curve. It maybe due to the reason that both are based on the frequency solution method, although the threedimenstional assumption and axial symmetry assumption are made separately. The different forward model assumption will lead to different backcalculation results. It is http://www.sciencepub.org References 1. 2. 3. 80 Magnuson, A. H., R. L. Lytton, and Briggs R. Comparison of Computer Predictions and Field Data for Dynamic Analysis of Falling-Weight Deflectometer Data. Transportation Research Record, No.1293, TRB, National Research Council, Washington D C, 1991, pp. 61-71. Kang, Y.V. Multifrequency Back-Calculation of PavementLayer Moduli. Journal of Transportation Engineering, ASCE, Vol. 124, No. 1, 1998, pp. 73-81. Wang F. M., Y. G. Ji, M. T. Luan. a Simpled Method of Viberation Analysis of Layered Foundation and Applications in Pavement Parameter Identification. The 4th International Conference on Recent Advances in Geotechnical Earthquake Engineering and Soil Dynamics, San Diego, USA, March26-31, 2001 editor@sciencepub.net The Journal of American Science, 2(2), 2006, Ji, et al, Method for Dynamic Response of Flexible Pavement 4. Chatti, K., W. S. Haider, H. S. Lee, Y. G.. Ji, and H. Salama. Evaluation of Non-linear and Dynamic Effects on Pavement Response under FWD Loading. International Journal of Pavements, Vol. 2, 2003, pp. 88-99. 5. Al-Khoury, R., A. Scarpas, C. Kasbergen, and J. Blaauwendraad. Spectral Element Technique for Efficient Parameter Identification of Layered Media. Part I: Forward Calculation. International Journal of Solids and Structures, Vol 38, 2001, pp. 1605-1623. 6. Al-Khoury, R., A. Scarpas, C. Kasbergen, and J. Blaauwendraad. Spectral Element Technique for Efficient Parameter Identification of Layered Media. Part II: Inverse Calculation. International Journal of Solids and Structures, Vol 38, 2001, pp. 87538772. 7. Uzan, J., Dynamic Linear Backcalculation of Pavement Material Parameters. Journal of Transportation Engineering, ASCE, Vol. 120, No. 1, 1994, pp. 109-126. 8. Chatti K., Y. G. Ji, and R. S. Harichandran. Dynamic Time Domain Backcalculation of Layer Complex Moduli and Thicknesses in Asphalt Concrete Pavements. CD-ROM. Transportation Research Board, National Research Council, Washington, D.C., 2004 http://www.sciencepub.org 9. 10. 11. 12. 13. 14. 81 Dong, Q., K. Himeno, and Y. Hachiya, K. Matsui. Time Domain Backcalculation of material Properties in Pavements Modeled as Layered Viscelastic Sysem. CD-ROM. Transportation Research Board, National Research Council, Washington, D.C., 2004 Losa, M. The Influence of Asphalt Pavement Layer Properties on Vibration Transmission. International Journal of Pavements, Vol. 1, No. 1, Jan. 2002, pp. 67-76. Ji Y. G., F. M. Wang, and M. T. Luan, A Spline Semi-analytical Method for Vibration Analysis of Layered Visco-elastic Foundation. Chinese Journal of Geotechnical Engineering ,Vol.24 No.1, 2002, pp.34-37. Tajirian, F. T. Impedance Matrices and Interpolation Techniques for 3-D Interaction Analysis by the Flexible Volume Method. Ph.D. dissertation, University of California, Berkeley, 1981. Ji Y. G., F. M. Wang, and Z. Y. Guo. Material Properties Backcalculation for Falling Weight Deflectometer Tests. Journal of Chinese Civil Engineering, Vol. 21 No.2, 2002, pp.123~125 Wang, F. M., and R. L. Lytton. System identification method for backcalculating pavement layer properties. Transportation Research Record, No.1384, National Research Council, Washington, D.C., 1993, pp.1-7 editor@sciencepub.net