Moment and couples
advertisement

Statics GE 210
Level 4
Force System
Moment and couples in 2 and 3 dimensions
Presentation by
• Instructor: ضياء الرحمن عبدا لرحمن.م
Lecturer Department of Civil Engineering
College of Engineering
University of Majmaah, Majmaah
1
Chapter Objectives
• Concept of moment of a force in two and three
dimensions
• Method for finding the moment of a force about a
specified axis.
• Define the moment of a couple.
• Determine the resultants of non-concurrent force
systems
• Reduce a simple distributed loading to a resultant force
having a specified location
2
Chapter Outline
1.
2.
3.
4.
5.
6.
7.
8.
9.
Moment of a Force – Scalar Formation
Cross Product
Moment of Force – Vector Formulation
Principle of Moments
Moment of a Force about a Specified Axis
Moment of a Couple
Simplification of a Force and Couple System
Further Simplification of a Force and Couple System
Reduction of a Simple Distributed Loading
3
4.1 Moment of a Force – Scalar Formation
•
•
Moment of a force about a point or axis – a measure
of the tendency of the force to cause a body to rotate
about the point or axis
Torque – tendency of rotation caused by Fx or simple
moment (Mo) z
4
4.1 Moment of a Force – Scalar Formation
Magnitude
•
For magnitude of MO,
MO = Fd (Nm)
where d = perpendicular distance
from O to its line of action of force
Direction
•
Direction using “right hand rule”
5
4.1 Moment of a Force – Scalar Formation
Resultant Moment
•
Resultant moment, MRo = moments of all the forces
MRo = ∑Fd
6
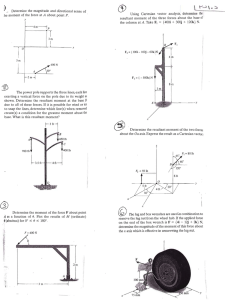
Example 4.1
For each case, determine the moment of the force about
point O.
7
Solution
Line of action is extended as a dashed line to establish
moment arm d.
Tendency to rotate is indicated and the orbit is shown as
a colored curl.
(a)Mo (100 N )( 2m) 200 N.m(CW )
8
Solution
(b)Mo (50N )(0.75m) 37.5N.m(CW )
(c )Mo (40N )(4m 2 cos30 m) 229N.m(CW )
9
Solution
(d )Mo (60N )(1sin 45 m) 42.4N.m(CCW )
(e)Mo (7kN)( 4m 1m) 21.0kN.m(CCW )
10
4.2 Cross Product
• Cross product of two vectors A and B yields C, which
is written as
C=AXB
Magnitude
• Magnitude of C is the product of
the magnitudes of A and B
• For angle θ, 0° ≤ θ ≤ 180°
C = AB sinθ
11
4.2 Cross Product
Direction
• Vector C has a direction that is perpendicular to the
plane containing A and B such that C is specified by
the right hand rule
• Expressing vector C when
magnitude and direction are known
C = A X B = (AB sinθ)uC
12
4.2 Cross Product
Laws of Operations
1. Commutative law is not valid
AXB≠BXA
Rather,
AXB=-BXA
• Cross product A X B yields a
vector opposite in direction to C
B X A = -C
13
4.2 Cross Product
Laws of Operations
2. Multiplication by a Scalar
a( A X B ) = (aA) X B = A X (aB) = ( A X B )a
3. Distributive Law
AX(B+D)=(AXB)+(AXD)
• Proper order of the cross product must be maintained
since they are not commutative
14
4.2 Cross Product
Cartesian Vector Formulation
• Use C = AB sinθ on pair of Cartesian unit vectors
• A more compact determinant in the form as
i
AXB Ax
Bx
j
Ay
By
k
Az
Bz
15
4.3 Moment of Force - Vector Formulation
• Moment of force F about point O can be expressed
using cross product
MO = r X F
Magnitude
• For magnitude of cross product,
MO = rF sinθ
• Treat r as a sliding vector. Since d = r sinθ,
MO = rF sinθ = F (rsinθ) = Fd
16
4.3 Moment of Force - Vector Formulation
Direction
• Direction and sense of MO are determined by righthand rule
*Note:
- “curl” of the fingers indicates the sense of rotation
- Maintain proper order of r and F since cross product
is not commutative
17
4.3 Moment of Force - Vector Formulation
Principle of Transmissibility
• For force F applied at any point A, moment created
about O is MO = rA x F
• F has the properties of a sliding vector, thus
M O = r1 X F = r2 X F = r3 X F
18
4.3 Moment of Force - Vector Formulation
Cartesian Vector Formulation
• For force expressed in Cartesian form,
i
M O r XF rx
j
ry
k
rz
Fx
Fy
Fz
• With the determinant expended,
MO = (ryFz – rzFy)i
– (rxFz - rzFx)j + (rxFy – yFx)k
19
4.3 Moment of Force - Vector Formulation
Resultant Moment of a System of Forces
• Resultant moment of forces about point O can be
determined by vector addition
MRo = ∑(r x F)
20
Example 4.4
Two forces act on the rod. Determine the resultant
moment they create about the flange at O. Express the
result as a Cartesian vector.
21
Solution
Position vectors are directed from point O to each force
as shown.
These vectors are
rA 5 j m
rB 4i 5 j 2k m
The resultant moment about O is
M O r F rA F rB F
i
j
k
i
j
k
0
5
0 4
5
2
60 40 20
80 40 30
30i 40 j 60k kN m
22
4.4 Principles of Moments
• Also known as Varignon’s Theorem
“Moment of a force about a point is equal to the sum of
the moments of the forces’ components about the point”
• Since F = F1 + F2,
MO = r X F
= r X (F1 + F2)
= r X F1 + r X F2
23
Example 4.5
Determine the moment of the force about point O.
24
Solution
The moment arm d can be found from trigonometry,
d 3sin 75 2.898 m
Thus,
M O Fd 52.898 14.5 kN m
Since the force tends to rotate or orbit clockwise about
point O, the moment is directed into the page.
25
4.5 Moment of a Force about a Specified Axis
• For moment of a force about a point, the moment and
its axis is always perpendicular to the plane
• A scalar or vector analysis is used to find the
component of the moment along a specified axis that
passes through the point
26
4.5 Moment of a Force about a Specified Axis
Scalar Analysis
• According to the right-hand rule, My is directed along
the positive y axis
• For any axis, the moment is
M a Fd a
• Force will not contribute a moment
if force line of action is parallel or
passes through the axis
27
4.5 Moment of a Force about a Specified Axis
Vector Analysis
• For magnitude of MA,
MA = MOcosθ = MO·ua
where ua = unit vector
• In determinant form,
uax
M a u ax (r XF ) rx
Fx
u ay
ry
Fy
uaz
rz
Fz
28
Example 4.8
Determine the moment produced by the force F which
tends to rotate the rod about the AB axis.
29
Solution
Unit vector defines the direction of the AB axis of the rod,
where
rB 0.4i 0.2 j
uB
0.8944i 0.4472 j
2
2
rB
0.4 0.2
For simplicity, choose rD
rD 0.6im
The force is
F 300k N
30
4.6 Moment of a Couple
• Couple
– two parallel forces
– same magnitude but opposite direction
– separated by perpendicular distance d
• Resultant force = 0
• Tendency to rotate in specified direction
• Couple moment = sum of moments of both couple
forces about any arbitrary point
Slide 85
31
4.6 Moment of a Couple
Scalar Formulation
• Magnitude of couple moment
M = Fd
• Direction and sense are determined by right hand rule
• M acts perpendicular to plane containing the forces
32
4.6 Moment of a Couple
Vector Formulation
•
For couple moment,
M=rXF
• If moments are taken about point A, moment of –F is
zero about this point
• r is crossed with the force to which it is directed
33
4.6 Moment of a Couple
Equivalent Couples
• 2 couples are equivalent if they produce the same
moment
• Forces of equal couples lie on the same plane or plane
parallel to one another
34
4.6 Moment of a Couple
Resultant Couple Moment
• Couple moments are free vectors and may be applied
to any point P and added vectorially
• For resultant moment of two couples at point P,
M R = M1 + M2
• For more than 2 moments,
MR = ∑(r X F)
35
Example 4.12
Determine the couple moment acting on the pipe.
Segment AB is directed 30° below the x–y plane.
36
SOLUTION I (VECTOR ANALYSIS)
Take moment about point O,
M = rA X (-250k) + rB X (250k)
= (0.8j) X (-250k) + (0.66cos30ºi
+ 0.8j – 0.6sin30ºk) X (250k)
= {-130j}N.cm
Take moment about point A
M = rAB X (250k)
= (0.6cos30°i – 0.6sin30°k)
X (250k)
= {-130j}N.cm
37
SOLUTION II (SCALAR ANALYSIS)
Take moment about point A or B,
M = Fd = 250N(0.5196m)
= 129.9N.cm
Apply right hand rule, M acts in the –j direction
M = {-130j}N.cm
38
4.7 Simplification of a Force and Couple System
• An equivalent system is when the external effects are
the same as those caused by the original force and
couple moment system
• External effects of a system is the translating and
rotating motion of the body
• Or refers to the reactive forces at the supports if the
body is held fixed
39
4.7 Simplification of a Force and Couple System
• Equivalent resultant force acting at point O and a
resultant couple moment is expressed as
FR F
M R O M O M
• If force system lies in the x–y plane
and couple moments are
perpendicular to this plane,
FR x Fx
FR y Fy
M R O M O M
40
4.7 Simplification of a Force and Couple System
Procedure for Analysis
1. Establish the coordinate axes with the origin located at
point O and the axes having a selected orientation
2. Force Summation
3. Moment Summation
41
Example 4.16
A structural member is subjected to a couple moment M
and forces F1 and F2. Replace this system with an
equivalent resultant force and couple moment acting at its
base, point O.
42
Solution
Express the forces and couple moments as Cartesian
vectors.
F1 {800k }N
rCB
F2 (300 N )uCB (300 N )
rCB
0.15i 0.1 j
300
{249.6i 166.4 j }N
2
2
(0.15) (0.1)
4
3
M 500 j 500 k {400 j 300k }N .m
5
5
43
Solution
Force Summation.
FR F ;
FR F1 F2 800k 249.6i 166.4 j
{249.6i 166.4 j 800k }N
M Ro M C M O M rC XF1 rB XF2
i
j
k
(400 j 300k ) (1k ) X (800k ) 0.15
0.1 1
249.6 166.4 0
{166i 650 j 300k }N .m
44
4.8 Further Simplification of a Force and Couple System
Concurrent Force System
•
A concurrent force system is where lines of action of
all the forces intersect at a common point O
FR F
45
4.8 Further Simplification of a Force and Couple System
Coplanar Force System
•
•
Lines of action of all the forces lie in the same plane
Resultant force of this system also lies in this plane
46
4.8 Further Simplification of a Force and Couple System
Parallel Force System
•
•
Consists of forces that are all parallel to the z axis
Resultant force at point O must also be parallel to this
axis
47
4.8 Further Simplification of a Force and Couple System
Reduction to a Wrench
•
•
3-D force and couple moment system have an
equivalent resultant force acting at point O
Resultant couple moment not perpendicular to one
another
48
Example 4.18
The jib crane is subjected to three coplanar forces.
Replace this loading by an equivalent resultant force and
specify where the resultant’s line of action intersects the
column AB and boom BC.
49
Solution
Force Summation
FRx Fx ;
3
FRx 2.5kN 1.75kN
5
3.25kN 3.25kN
FRy Fy ;
4
FRy 2.5 N 0.6kN
5
2.60kN 2.60 N
50
Solution
For magnitude of resultant force,
FR ( FRx )2 ( FRy )2 (3.25)2 (2.60)2
4.16kN
For direction of resultant force,
F
1 2.60
q tan 1 Ry ÷
tan
÷
÷
F
3
.
25
Rx
38.7
51
Solution
Moment Summation
Summation of moments about point A,
M RA M A ;
3.25kN ( y ) 2.60kN (0)
1.75kn(1m) 0.6kN (0.6m)
3
4
2.50kN (2.2m) 2.50kN (1.6m)
5
5
y 0.458m
52
Solution
Moment Summation
Principle of Transmissibility
M RA M A ;
3.25kN (2.2m) 2.60kN ( x)
1.75kn(1m) 0.6kN (0.6m)
3
4
2.50kN (2.2m) 2.50kN (1.6m)
5
5
x 2.177m
53
4.9 Reduction of a Simple Distributed Loading
• Large surface area of a body may be subjected to
distributed loadings
• Loadings on the surface is defined as pressure
• Pressure is measured in Pascal (Pa): 1 Pa = 1N/m2
Uniform Loading Along a Single Axis
• Most common type of distributed
loading is uniform along a
single axis
54
4.9 Reduction of a Simple Distributed Loading
Magnitude of Resultant Force
• Magnitude of dF is determined from differential area dA
under the loading curve.
• For length L,
FR wx dx dA A
L
A
• Magnitude of the resultant force is equal to the total
area A under the loading diagram.
55
4.9 Reduction of a Simple Distributed Loading
Location of Resultant Force
• MR = ∑MO
• dF produces a moment of xdF = x w(x) dx about O
• For the entire plate,
xFR xw( x)dx
M Ro M O
L
• Solving for x
x
xw( x)dx xdA
L
w( x)dx
L
A
dA
A
56
Example 4.21
Determine the magnitude and location of the equivalent
resultant force acting on the shaft.
57
Solution
For the colored differential area element,
dA wdx 60 x 2 dx
For resultant force
FR F ;
2
FR dA 60 x 2 dx
A
0
2
x
23 03
60 60
3 0
3 3
160 N
3
58
Solution
For location of line of action,
2
4
x
24 04
2
A xdA 0 x(60 x )dx 60 4 0 60 4 4
x
160
160
160
dA
2
A
1.5m
Checking,
ab 2m(240 N / m)
A
160
3
3
3
3
x a (2m) 1.5m
4
4
59
QUIZ
1. What is the moment of the 10 N force about point A
(MA)?
F = 12 N
A) 3 N·m
B) 36 N·m C) 12 N·m
D) (12/3) N·m E) 7 N·m
• A
d=3m
2. The moment of force F about point O is defined as MO
= ___________ .
A) r x F
B) F x r
C) r • F
D) r * F
60
QUIZ
3. If a force of magnitude F can be applied in 4 different
2-D configurations (P,Q,R, & S), select the cases
resulting in the maximum and minimum torque values
on the nut. (Max, Min).
S
A) (Q, P)
B) (R, S)
R
C) (P, R)
D) (Q, S)
P
Q
4. If M = r F, then what will be the value of M • r ?
A) 0
B) 1
C) r2F
D) None of the above.
61
QUIZ
5. Using the CCW direction as positive, the net moment
of the two forces about point P is
A) 10 N ·m
B) 20 N ·m
C) - 20 N ·m
D) 40 N ·m
E) - 40 N ·m
10 N
3m
P
2m
5N
6. If r = { 5 j } m and F = { 10 k } N, the moment
r x F equals { _______ } N·m.
A) 50 i
B) 50 j
C) –50 i
D) – 50 j
E) 0
62
QUIZ
7. When determining the moment of a force about a
specified axis, the axis must be along _____________.
A) the x axis
B) the y axis
C) the z axis
D) any line in 3-D space
E) any line in the x-y plane
8. The triple scalar product u • ( r F ) results in
A) a scalar quantity ( + or - )
B) a vector quantity.
C) zero.
D) a unit vector.
E) an imaginary number.
63
QUIZ
9. The vector operation (P Q) • R equals
A) P (Q • R).
B) R • (P Q).
C) (P • R) (Q • R).
D) (P R) • (Q R ).
10. The force F is acting along DC. Using the triple
product to determine the moment of F about the bar
BA, you could use any of the following position vectors
except
A) rBC B) rAD
C) rAC
D) rDB
E) rBD
64
QUIZ
11. For finding the moment of the force F about the x-axis,
the position vector in the triple scalar product should
be ___ .
A) rAC
B) rBA
C) rAB
D) rBC
12. If r = {1 i + 2 j} m and F = {10 i + 20 j + 30 k} N, then
the moment of F about the y-axis is ____ N·m.
A) 10
B) -30
C) -40
D) None of the above.
65
QUIZ
13. In statics, a couple is defined as __________
separated by a perpendicular distance.
A) two forces in the same direction
B) two forces of equal magnitude
C) two forces of equal magnitude acting in the same
direction
D) two forces of equal magnitude acting in opposite
directions
14. The moment of a couple is called a _____ vector.
A) Free
B) Spin
C) Romantic
D) Sliding
66
QUIZ
15. F1 and F2 form a couple. The moment of the couple
is given by ____ .
F1
A) r1 F1
B) r2 F1
r1
r2
C) F2 r1
D) r2 F2
F2
16. If three couples act on a body, the overall result is that
A) The net force is not equal to 0.
B) The net force and net moment are equal to 0.
C) The net moment equals 0 but the net force is not
necessarily equal to 0.
D) The net force equals 0 but the net moment is not
necessarily equal to 0 .
67
QUIZ
17. A general system of forces and couple moments
acting on a rigid body can be reduced to a ___ .
A) single force
B) single moment
C) single force and two moments
D) single force and a single moment
18. The original force and couple system and an
equivalent force-couple system have the same
_____ effect on a body.
A) internal
B) external
C) internal and external
D) microscopic
68
QUIZ
18. The forces on the pole can be reduced to a single
Z
force and a single moment at point ____ .
S
A) P
B) Q
C) R
R
Q
D) S
E) Any of these points.
P
Y
X
19. Consider two couples acting on a body. The simplest
possible equivalent system at any arbitrary point on
the body will have
A) One force and one couple moment.
B) One force.
C) One couple moment.
D) Two couple moments.
69
QUIZ
20. Consider three couples acting on a body. Equivalent
systems will be _______ at different points on the
body.
A) Different when located
B) The same even when located
C) Zero when located
D) None of the above.
70
QUIZ
21. The resultant force (FR) due to a distributed load is equivalent to
the _____ under the distributed loading curve, w = w(x).
A) Centroid
B) Arc length
y
Distributed load curve
w
C) Area
D) Volume
x
FR
22. The line of action of the distributed load’s equivalent force passes
through the ______ of the distributed load.
A) Centroid
B) Mid-point
C) Left edge
D) Right edge
71
QUIZ
23. What is the location of FR, i.e., the distance d?
A) 2 m B) 3 m C) 4 m
D) 5 m
E) 6 m
A
BA
3m 3m
FR
B
d
24. If F1 = 1 N, x1 = 1 m, F2 = 2 N and x2 = 2 m, what
is the location of FR, i.e., the distance x.
A) 1 m B) 1.33 m C) 1.5 m
F1
x2
x FR
F
2
D) 1.67 m E) 2 m
x1
72
QUIZ
25. FR = ____________
A) 12 N
B) 100 N
C) 600 N
D) 1200 N
100 N/m
12 m
26. x = __________.
A) 3 m
B) 4 m
C) 6 m
D) 8 m
FR
x
73