HW 2 - Due 3/11
advertisement

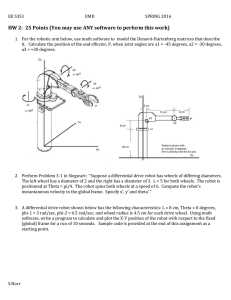
EE 5351 UMD SPRING 2015 HW 2: (You may use ANY software to perform this work) 1. For the planar figure shown below: a. Form a standard 4x4 transformation matrix for each instance of translation and rotation in the robotic arm. b. Form the homogeneous matrix, H, from the matrices in part a. c. Use the H matrix to calculate the position vector from the origin to point P if the joint angles are a1 = 30 degrees, a2 = -15 degrees and a3 = 60 degrees. 2. For the figure shown below: a. Form a standard 4x4 transformation matrix for each instance of translation and rotation in the robotic arm. b. Form the homogeneous matrix, H, from the matrices in part a. c. Use the H matrix for calculate the position vector from the origin to point P if the rotational joint angle is at 60 degrees, and the linear joint is at 50% (8 cm). S.Norr EE 5351 UMD SPRING 2015 3. Perform Problem 3-1 in Siegwart 4. A differential drive robot shown below has the following characteristics: L = 5 cm, Theta = 30 degrees, phi-1 = 2 rad/sec, phi-2 = 4 rad/sec, and wheel radius is 2.5 cm for each drive wheel. Using math software, write a program to calculate and plot the X-Y position of the robot with respect to the fixed (global) frame for a run of 10 seconds. 5. 6. (FOR GRAD CREDIT): Write a MATLAB (or other software) program to calculate and plot theta, omega and alpha for problem 4 above. (theta is the angle between the robot’s local frame and the fixed frame, omega is the angular velocity of that angular difference, and alpha is the angular acceleration) Plot alpha on a normal basis with g (that is plot alpha as a ratio with g, 9.81 m/sec) S.Norr