Sec. 2.3 Characterization of Invertible Matrices.doc
advertisement

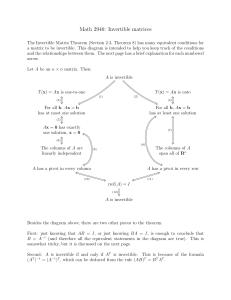
2.3 Characterization of Invertible Matrices Theorem 8 pulls facts together. Memorize it. Theorem 2.8 (The Invertible Matrix Theorem): Let A be a square n x n matrix. The following statements are equivalent. a. A is an invertible matrix. b. A is row equivalent to In. c. A has n pivot positions. d. The equation Ax = 0 has only the trivial solution. e. The columns of A form a linearly independent set. f. The linear transformation x → Ax is one-toone. g. The equation Ax = b has at least one solution for each b in Rn. h. The columns A span Rn. i. The linear transformation x → Ax maps Rn onto Rn. j. There is an n x n matrix C s.t. CA = In. k. There is an n x n matrix D s.t. AD = In. l. AT is an invertible matrix. 1 Example: We can use the IMT to determine whether a matrix in invertible. Let 1 3 0 A - 4 11 1 2 7 3 Use row operations to get information about the pivot positions: R2 + 4R1 and R3 + (-2R1) 1 3 0 A 0 1 1 0 1 3 R3 + R2 1 3 0 A 0 1 1 0 0 4 A is a 3x3 matrix with has 3 pivot positions, so A in invertible. 2 Ex: Suppose H is a 5 x 5 matrix, and suppose v is a vector in R5 which is not a linear combination of the columns of H. What can you say about the number of solutions to Hx = 0? Answer: By the definition of span, since v R5 and is not a linear combination of the columns of H, the columns of H do not span R5. Thus, part h of the IMT fails, so part d also fails, and Hx = 0 has more than just the trivial solution, hence infinitely many solutions. 3