Mapping Chemical Contaminants in
Oceanic Sediments Around Point
Loma’s Treated Wastewater Outfall
Kerry Ritter
Ken Schiff
N. Scott Urquhart
Dawn Olson
Ami Groce
Tim Stebbins
Overview
Motivation
Problems with current methods
Kriging offers a more sophisticated statistical
alternative
Provides predictions as well as prediction
errors
Allows for a cost-efficiency analyses for any
sampling density or configuration
Maps are useful tools for understanding
and managing resources
Spatial patterns are recognized more easily
with visual displays
Can quickly locate disturbance, assess its
relative magnitude and extent, and weigh risk
to neighboring areas
Maps are effective and efficient media for
communicating information to the public
How do we design the “optimal”
sampling grid?
• Depends on goals of the study
• Samples closer together tend to be more alike than
samples farther apart
• Placing samples to far apart may make extrapolation to
non-sampled locations suspect
• Placing samples too close together may be redundant
and waste resources
Current maps
Often based on sparse data (< 30 sites)
Use simple interpolation methods
–
–
–
Spline smoothing
Triangulation
Linear interpolation
Do not provide measures of uncertainty
Cannot determine how dense a sampling grid
is optimal
Core Grid
Core Grid + Phase I
What is kriging?
A statistical tool used to create maps
Predictions = weighted average of neighbors
Weights based on the strength of spatial
correlation
Provides estimate of confidence
Optimal
Available in many mapping or statistical
software packages
Kriging Predictions
(Core + Phase I)
Kriging Errors
(Core + Phase I)
For kriging understanding the
spatial variablity is key
Determines weighting factors for kriging
Provides estimates of kriging errors
–
–
Confidence intervals
Cost-efficiency analyses for future studies
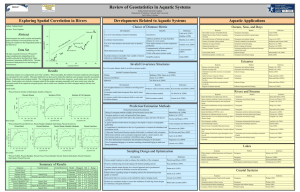
How do we model spatial
variability?
Variogram= variance of paired sample differences as
a function of distance between pairs
Measure of spatial correlation
Apply statistical models for fitting variogram
–
–
–
–
Spherical
Gaussian
Exponential
Linear
Use method of least squares to fit parameters
Variogram fit for lead (spherical)
0.10
0.05
0.0
gamma
0.15
0.20
0.25
Empirical Variogram f or Lead (Point Loma)
objective = 0.0734
0.0
20.02
km
40.04
km
distance
Log transformed and detrended
Distance
b/t sampling sites
80.06km
Variorgram provides estimates of
prediction errors that…
Do not depend on the data
Do not depend on location
*Depend only on distance between sites
Link variogram to cost efficiency
Can determine prediction error for any grid
spacing/configuration
Can weigh the cost of increasing sampling
effort with benefit of precision
90
80
70
60
Percent Core Error
100
Percent error v. density
1
Core
2
4km
3
2.5km
Sampling density
4
1km
5
0.5km
Kriging Predictions
(Core + Phase I)
Kriging Errors
(Core + Phase I)
Summary
Kriging offers a more sophisticated statistical
alternative for creating maps
Provides predictions as well as prediction errors
Errors are independent of data, but depend only on
distance between sampling sites
Modeling the variogram is key
Allows for a cost-efficiency analyses for any sampling
density or configuration
–
Uneven allocation of resources, targeted sampling
 0
0