wyrembelski.ppt
advertisement

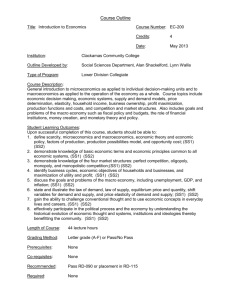
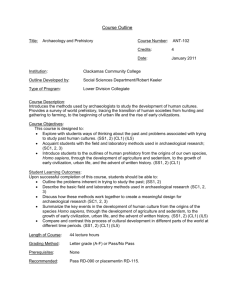
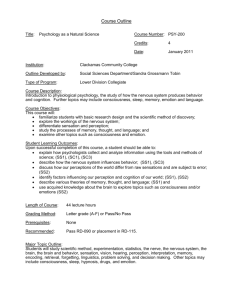
Start RsU1 , y Us1 Project Overview Ps1 J sys f (x) Minimize: x x1 , x2 , ... , xn Subject To: J1 0 || Rs1 RsU1 || || ys1 yUs1 || R y ~ x , y , y , R , , Minimize: With Respect To: Subject To: s1 || R ss, k s1 ss ss x J1 R ,y J 1 ( xi x ) i 1 With Respect To: x x , x , , x * Subject To: * 1 * 2 U ss1 R L ss1 R ,y n n Minimize: * n hs1 ( Rs1 , ~ xs1 , ys1 ) 0 y min s1 ys1 y Minimize: J 2 ( xi x ) i 1 With Respect To: x x , x , , x * * 1 * 2 local variables g1m ( x ) 0 g 2m ( x ) 0 Subject To: ,y * n h1m ( x * ) 0 h2 m ( x * ) 0 xi* min xi* xi* max xi* min xi* xi* max 2. Update subsystem boundary conditions using stochastic variations. max s1 R ss , ~ x s1 , y s1 U ss 2 L ss1 R L ss 2 ,y Rs1 Rs1 rs1 ( Rss , ~ x s1 , y s1 ) L ss 2 3. Perform design optimization using subsystem model and most recent stochastic subsystem boundary conditions. f (x ) Minimize: Pss1 Minimize: || Rss1 R U ss1 || || y ss1 y U ss1 || ~ xss1 , yss1 With Respect To: g ss1 ( Rss1 , ~ xss1 , yss1 ) 0 Subject To: h (R , ~ x ,y )0 * i 1 to n U ss 2 * 2 i local variables * yssL , k || y J2 U ss1 * 2 i ss, k k 2 g s1 ( Rs1, ~ xs1, ys1 ) 0 ~ xsmin ~ xs1 ~ xsmax 1 1 x y || y RssL , k || R k 2 J2 0 R 1. Evaluate system model using initial subsystem design and extract boundary conditions for subsystem model. ss1 ss1 ~ ~ ~ max xssmin 1 xss1 xss1 i 1 to n ss1 ss1 max y ssmin 1 y ss1 y ss1 ~ xss1 , y ss1 R ss1 Pss 2 Minimize: || Rss 2 R U ss 2 With Respect To: Subject To: g ss 2 || || yss 2 y ~ xss 2 , yss 2 (R , ~ x ,y ss 2 ss 2 ss 2 U ss 2 || 4. Evaluate system model using updated subsystem design and extract new boundary conditions for subsystem model. )0 Max cycle number exceeded? y ssmin2 y ss 2 y ssmax2 ~ xss2 , y ss2 Update subsystem boundary conditions? No g ( x) 0 h( x ) 0 ximin xi ximax i 1 to n Subject To: No hss 2 ( Rss 2 , ~ xss 2 , yss 2 ) 0 ~ xssmin2 ~ xss 2 ~ xssmax 2 x x1 , x2 , ... , xn With Respect To: Yes Rss2 Yes Disciplinary Analysis 2 Disciplinary Analysis 1 Rss1 rss1 ( ~ xss1 , yss1 ) Collaborative Optimization • Nested optimization • Bi-level hierarchy • Sends copies of variables to lower level • Sometimes difficult to locate global minimum Beam Bending Example Problem Stop Analytical Target Cascading COMPOSE Algorithm All-At-Once • Sequence of subproblems at each level • Two or more level hierarchy • Variable sharing occurs between related elements • Computationally expensive, but efficient • COMPonent Optimization within a System Environment • Global analysis followed by local optimization • Updates local boundary conditions • Complex problems require stochastic BC updates • Optimizes entire system at the same time • Non-hierarchy • Used to locate global minimum • Computationally most expensive Problem Formation Two I-beams, bounded at the ends, contain a single load of 100 kN applied at the junction point B. The objective is to minimize the volume of section 1 with respect to the I-beam design variables h1, l1, t1, and f1. The problem is subject to a minimum moment constraint of 300,000 N-m at point A. Each design variable is subject to upper and lower boundary values. Rss 2 rss 2 ( ~ xss 2 , yss 2 ) Results and Discussion A 1 100 kN B 2 C Beam Diagram Optimal Volume of Beam Section 1 This problem was used to demonstrate the COMPOSE algorithm and the AAO method. The AAO method proved to find the better optimal design and converged faster. However, the global analysis of this problem was simple. For a complex global analysis, the required computational cost is dramatically increased. The COMPOSE method reduces the number of global analysis, thus decreasing the cost. 0.35 0.30 AAO 0.25 Volume (m3) Decomposing a problem into a global/local model reduces the convergence time for complex optimization problems. This research focused on comparing the common methods of multidisciplinary structural optimization by decomposition. Further exploration included a detailed study of the COMPOSE algorithm, specifically its performance and application to various problems. This involved solving a simple beam bending problem using COMPOSE and the All-At-Once (AAO) method, followed by comparing the results. With Respect To: RsL1 , y sL1 COMPOSE 0.20 0.15 0.10 0.05 0.00 0 2 4 6 8 10 12 14 Optimization Cycle Objective Function Values Real Life Application and Future Research Certain problems, like the design of rails in a truck chassis for crashworthiness, can contain hundreds of design variables. The computational expense of solving problems of this magnitude is substantial using AAO. When strong coupling exists between the global and local model, decomposing the problem can largely decrease the analysis time of the optimization process. For future research, one can explore the range of solvable problems by decomposition, specifically with the COMPOSE algorithm. The addition of reliability based design optimization would further benefit the use of these methods. David Wyrembelski Ron C. Averill (Advisor) Department of Mechanical Engineering Rails (Local Model) Global Model of Truck for Crashworthiness Michigan State University