The incremental harmonic balance method for nonlinear
advertisement

The incremental harmonic balance method for nonlinear
vibration of autonomous self-excited oscillators with impact
dampers
Anoshiravan Farshidianfara, Neda Nickmehrb, Bibi Maryam Arabic
Department of Mechanical Engineering, Ferdowsi University of Mashhad,
Mashhad, Iran
ABSTRACT
Impact dampers in various forms are used to control the response of vibratory systems
subjected to either forced or self-excitations. In this paper the performance of an impact
damper for controlling the vibration of a van der Pol oscillator is investigated using the
incremental harmonic balance (IHB) method. A numerical method has been used in order
to comparison with the analytical results. At the final stage the effect of the coefficient of
restitution in reducing the amplitude of vibration is studied.
1
INTRODUCTION
Impact dampers are sometimes used for reducing the unavoidable vibrations of machines
and structures. The practical application of impact dampers dates relatively far back. For
example they were used in 1937 in turbine blades [1], in 1967 in tall flexible structures [2]
and in 1972 in machine tools [3]. Masri [4] in 1970 investigated general motion and stability
of impact dampers. Bepat et al. [5] have studied single impact damper and provided easy to
use design charts for the former. The use of bean-bags as the secondary mass, instead of
metallic shots has been proposed by Popplewell and Semercigi [6] for noiseless operation of
the impact dampers. Ema and Marui [7] investigated analytically and experimentally the
characteristics of an impact damper in free damped vibration in detail to improve the
damping capability of cutting tools such as long drills. Mallik et al.[8,9] proposed the
performance of an impact damper to control the amplitude of non-linear vibrating systems
such as Duffing oscillator and self-excited van der Pol oscillator using harmonic balance and
piecewise equivalent linearization approach, respectively. They presented, with the optimum
design, two symmetric collisions per cycle are always seen to occur.
An impact damper is a freely moving mass that is limited by stops, located on a dynamic
structural system to be controlled. When the system is excited, the impact mass moves
relative to the structure resulting in impacts between the mass and the stops, transferring
momentum from the structure to the impact mass, and dissipating energy as heat, noise and
high frequency vibrations.
In a self-excited system the excitation force is influenced by the motion of the system. An
autonomous van der Pol oscillator is the most common mathematical model in which the
a
Email address: Farshid@um.ac.ir
Email address: neda.nickmehr@gmail.com
c
Email address: Farshid@um.ac.ir
b
position dependent damping force changes sign once in every cycle and performs like the
source of energy to provide the vibration.
The purpose of this paper is to apply an impact damper to reduce the amplitude of van der
Pol oscillator with large nonlinearity and analyse the system by IHB method.
The IHB method is a powerful approach for computation of periodic solutions of
nonlinear dynamical systems. In this method the solution of the system is represented by a
limited expansion of Fourier series and so only linear equations have to be solved iteratively
in each incremental step. Compared with classical procedures the IHB method is remarkably
convenient for computer implementation. The IHB method has already been successfully
applied to or adapted for a wide range of dynamical systems and was originally presented for
analyzing periodic structural vibrations [10].
Finally the responses that are obtained from IHB method have been compared with those
calculated by numerical integration.
2
MATHEMATICAL MODEL OF THE SYSTEM
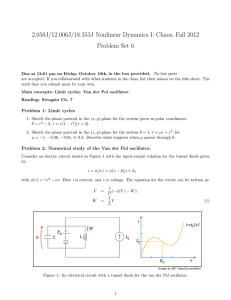
The investigated model of a single degree of freedom van der Pol oscillator with an
impact damper is shown in Figure 1. The interaction between colliding solids during a
perfectly elastic collision, can be proposed by a contact spring Figure 1(a) but when there is
an appreciable energy loss during impact, this model can be modified as a parallel
combination of a stiff spring and a damper Figure 1(b). The following dimensionless
equations describe the motion of the system between two consecutive impacts:
2 X1 e ( X 21 1) X 1 X 1 0
X 2 0
X1 X 2 d0
(1)
Where the dimensionless time τ is expressed by τ= ω t, in which t is the time variable and
ω is the oscillation frequency, also x0 , X 1 x1 / x 0 , X 2 x2 / x 0 , d 0 d / x0 .
Figure 1(a). Model of a van der Pol oscillator with impact damper
by a contact spring
Figure 1(b). Model of a van der Pol oscillator with impact damper by a stiff spring and a damper
3
INCREMENTAL HARMONIC BALANCE METHOD FOR MULTI D.O.F AUTONOMOUS
SYSTEMS
The non-linear equations of n-DOF autonomous system are described by the following
form:
2 Mq C q Kq f (q, q, , ) 0
(2)
Here the dots refer derivatives with respect to the dimensionless time t and ω is the
oscillation frequency. The parameter λ is added to the equations for the purpose of parametric
studies. q [q1 , q 2 ,...., q n ]T is the unknown vector of the system, and f is a non-linear
function of , , q, q . M , C and K are mass, linear viscous damping and linear stiffness
matrices, respectively.
The procedure of the IHB method for seeking periodic solutions is mainly divided into
two steps, first is a Netwon–Raphson procedure. Assuming q0 , 0 , 0 denote a state of
vibration of the system, by adding the corresponding increments to them, neighboring state
can be given by:
q q 0 q , 0 , 0
(3)
Where
q [ q 1 , q 2 ,...., q n ] T
(4)
q0 [q10 , q20 ,...., qn 0 ]
T
Substituting expressions (3) into Eq. (2) and neglecting small terms of higher order,
yields the following linearized incremental relation:
0 2 M q ( 0 C C N ) q ( K K N ) q
0 C q 0 Q ) P
R ( 20 M q
The elements of the matrices K N , C N , Q , P and R are computed by:
(5)
K N (f / q) 0 , C N (f / q ) 0 , Q (f / ) 0 , P (f / ) 0
(6)
R (0 Mq0 0C q 0 Kq0 f 0 )
(7)
2
If the system is odd, the steady state response can be expanded into the sum of N odd
harmonic terms as follows:
N
q j0
[ a
jK
cos ( 2 K 1 ) b jK sin ( 2 K 1 ) ] C S A j
(8)
K 1
N
q j 0 [ a jK cos (2 K 1) b jK sin (2 K 1) ] CS Aj
(9)
A j { a j1 , a j 2 , . . . , a jN , b j1 , b j 2 , . . . , b jN } T
(10)
CS { cos , cos 3 . . . , cos ( 2 N 1 ) , sin , sin 3 ,. . ., sin ( 2 N 1) }
(11)
k 1
Where
The unknowns’ vectors and their increments can be found as follows:
q0 SA , q0 SA
(12)
C S
CS
T
T
A { A1 , A2 ,... An } , A { A1 , A2 ,..., An } , S
CS
C S
(13)
Substituting expression (12) into Eq. (5) and using the Galerkin procedure yields:
2
( q) T [ 0 2 M q ( 0 C C N ) q ( K K N ) q ] d
0
2
(14)
( q) [ R ( 2 0 M q0 C q 0 Q ) P ] d
T
0
Or simply
KmcA R Rmc P
In which
(15)
K mc 0 M 0 C C N K K N
2
R ( 0 M 0 C K ) A f 0
2
Rmc ( 2 0 M C ) A Q
2
d ,
M S MS
T
2
S
C
0
2
S K Sd ,
CN
T
T
S C N Sd
0
S
T
K N Sd , f 0
0
2
Q
(16)
0
2
KN
C Sd
0
2
K
T
S
T
2
S
T
f 0 d
0
2
Q d ,
P
0
S
T
P d
0
To obtain the solution for equation (15), one solves it iteratively such that the norm of the
R is smaller than a certain convergence criterion, updating Kmc , Rmc , R and P at each stage. It
is the Newton-Raphson procedure of seeking solutions, and therefore the increments are not
necessarily infinitesimally small.
4
4.1
IHB FORMULATION OF VAN DER POL OSCILLATOR
Analytically steady state solution for van der Pol oscillator with large nonlinearity
In the following, we are going to solve equation (1) analytically by IHB method.
Obviously this equation is a special case of equation (2). Because of symmetric conditions
harmonic response can be taken in the form:
X 1 ( )
2 m1
[ a
n 1, 3,...
n
cos n bn sin n ]
(17)
It is worth mentioning that in equation (15) the number of incremental unknowns is
greater than the number of equations available because of parameters Δω and Δλ. However In
this investigation, λ is constant (λ =1) so it taken to be the control parameter (i.e. Δλ=0) while
Δω should be regarded as an unknown, also due to existence of autonomous system one of
the Fourier coefficients has to be fixed (e.g., ai =0 or bj =0), so the number of equations are
equal to that of the unknowns.
To illustrate the power of the IHB method, the nonlinear parameter of van der Pol
equation is considered to be large, e=1.5, so with reference to equation (1) and employing 5
odd harmonic terms in the computation the IHB periodic solution that is shown in Figure 2 is
expressed as follows:
x1 (t ) 2.0307 cos( 0.8854 * t ) 0.1670 cos( 3 * 0.8854 * t ) 0.0511 cos( 5 * 0.8854 * t )
0.0316 cos(7 * 0.8854 * t ) 0.2884 sin ( 3 * 0.8854 * t ) 0.0815 sin ( 5 * 0.8854 * t )
0.0031sin ( 7 * 0.8854 * t ) 0.0108 sin (9 * 0.8854 * t )
(18)
Figure 2. Periodic solution of van der Pol oscillator before impact for e=1.5 ;
The IHB method ; o
the NI method
For comparison the results computed by the Numerical Integration method (NI method)
are also presented in the Figure 2, the resutls of IHB method are almost the same as the NI
results.
4.2
Numerical simulation for van der Pol oscillator having Impact damper
Without any loss of generality, we have arbitrarily assign the time origin (t= 0) at the
instant of an impact with the right hand side wall of the container.
By using initial conditions x1( 0 ), x’1( 0 ) that are obtained from expression (18),
applying relations (19), [9] and with respect to parameters in Table 1, we can determine the
conditions after first impact and so by writing a computer code the response of the system
will be obtained, therefore the time of second impact can be computed. By following this
procedure the reduced amplitude of the system is presented.
ralative velocity of seperation
relative velocity of approach
, 2 * rm v ( x1 x1 )
(19)
Where rm , v , χ , x1’+ and x1’- are mass ratio, the velocity of free mass before and after impact,
coefficient of restitution, the velocity of main mass after each impact and the velocity of main
mass before each impact, respectively.
Table 1: System parameters
Parameter
Main mass, m1 (kg)
1
Auxiliary mass, m2 (kg)
0.18
Main stiffness, k1 (N/M)
1
Nonlinear parameter, e
1.5
Coefficient of
restitution
Case 1
0.2
Case 2
0.1
dimensionless backlash parameter, d0
5
value
1.5
RESULTS AND DISCUSSION
In this section the role of impact damper, for reducing the limit cycle amplitude of a van
der Pol oscillator with strong nonlinearity is reported. Here the efforts are devoted to reduce
the amplitude by properly choosing the parameter χ. Two different cases are studied; systems
with χ=0.2 and χ=0.1. Figures 3 and 4 show the amplitude of limit cycle for cases 1 and 2,
respectively. Figures 3 and 4 indicate that, within an equal value of d0=1.5 for two situations
and considering rm=0.18, the limit cycle amplitude will be reduced by increasing the value of
χ.
Figure 3. Time response of van der Pol oscillator after impact, Case 1: χ=0.2
Figure 4. Time response of van der Pol oscillator after impact, Case 1: χ=0.1
6
CONCLUSIONS
The effect of an impact damper, attached to a van der Pol oscillator has been investigated.
To determine the steady state response for nonlinear self-excited van der Pol oscillator the
incremental harmonic balance as an analytical method has been used and the numerical
integration has been applied to simulate the role of impact. Because of unique advantages of
IHB method for strongly nonlinear system, we can use it for greater value of e .For efficient
operation the value of χ should choose to be higher.
The next stage of research should concentrate upon study the effect of various parameters
in better performance of impact dampers.
7
REFERENCES
[1] A. L. PAGET, “Vibration in steam turbine buckets and damping by impacts”, Engineering 143, 305-307
(1937).
[2]
H. H. REED, “Hanging chain impact dampers-a simple method of damping tall flexible structures”,
Wind Effects on Buildings and Structures, Proceedings of Internal Research Seminar, Ottawa. 1967.
[3]
M. M. SADEK, “Impact dampers for controlling vibration in machine tools”, Machinery 120, 152-161
(1972).
[4]
S. F. MASRI, “General motion of impact dampers”, Journal of the Acoustical Society of America 47,
229-237 (1970).
[5]
C. N. BAPAT, S. SANKAR and N.POPPLEWELL, “Experimental investigation of controlling vibrations
using multi unit impact dampers’’, 53rd Shock and Vibration Bulletin 4, 1-12 (1983).
[6]
N. POPPLEWELL and S. E. SEMERCIGIL “Performance of the bean bag impact damper for a
sinusoidal external force”, Journal of Sound and Vibration 133, 193-223 (1989).
[7]
S. Ema, E. Marui, “Damping characteristics of an impact damper and its application”, International
Journal of Machine Tools and Manufacturers 36(3), 293–306 (1997).
[8]
S. CHATTERJEE, A. K. MALLIK and A. GHOSH “On impact dampers for nonlinear vibrating
systems”, Journal of Sound and Vibration 187(3), 403-420 (1995).
[9]
S. CHATTERJEE, A. K. MALLIK and A. GHOSH, “Impact dampers for controlling self-excited
oscillation”, Journal of Sound and Vibration 193(5), 1003-1014 (1996).
[10] S.L. Lau, Y.K. Cheung, “Amplitude incremental variational principle for nonlinear vibration of elastic
systems”, American Society of Mechanical Engineers Journal of Applied Mechanics 48, 959–964 (1981).