Development of a Smart Materials Based Actively Conformable Rotor Airfoil
advertisement

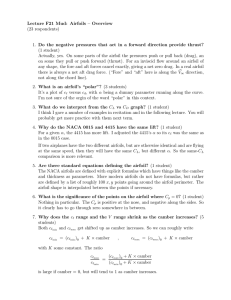
Project Number : PS 1.3 Development of a Smart Materials Based Actively Conformable Rotor Airfoil PIs: Prof. Farhan Gandhi Prof. Mary Frecker Graduate Student: Andrew Nissly Penn State University 2005 NRTC RCOE Program Review May 3-4, 2005 Background/ Problem Statement: • Develop analysis and design method for conformable rotor airfoil – achieve significant deformation required to reduce rotor vibration at N/rev – can be viewed as the successor to rotor blade trailing-edge flaps – advantage: integral structure (no hinges, linkages, etc.) Deformable skin Trailing Edge Flap Conformable Airfoil Technical Barriers: • Smart actuation must have required authority (under airloads) and bandwidth • weight, volume, and power constraints • Airfoil cross-section traditionally designed NOT to undergo any deformation • a fundamental change in design philosophy is required for conformable airfoil • reduction in cross-section stiffness is required • Large local surface strains in the skin due to shape change require novel materials •Highly-specialized sandwiched composite skins Task Objectives: • Develop design methodology for a conformable (controllable camber) rotor airfoil using a passive substructure and a limited number of actuators – Meet specified trailing edge deflection (camber) – Withstand aerodynamic loads – Consider volume (weight) constraint Concept presented at 2004 review Approach: • Shape optimization starting with passive structure of predetermined topology actuated by limited number of piezo actuator elements – max trailing edge vertical deformation (camber) while withstanding airloads – FEA-based optimization method, gradient-based solution method Expected Research Results or Products: • Develop new design methodology and obtain solution(s) • Demonstrate feasibility of a smart-materials based conformable rotor airfoil • controllable camber • flexible skin sections to allow large local strains • Develop a thorough understanding of the physical issues in this design • Build and evaluate demonstration prototype Numerical Testbed • Rotor Airfoil (NACA 0012) – – – – – Chord length: C = 1.66 ft (50 cm) Maximum Thickness: 12% chord Rigid Spar from LE to 25% Chord Only aft portion is actuated and flexible High EI, low EA skin Rigid D-Spar Axis of Symmetry Conformable Airfoil Actuation Mechanism A Cellular Truss Mechanism Active Vertical Members (Actuators) Point Moves up-down as actuators extend/shrink Deformed Configuration -- Top Skin Extends -- Bottom Skin Shrinks Passive Linkage Left active member restrained in vertical position exaggerated rotation of right active member Array of such units along the airfoil chord Accumulation of rotation, Build-up of camber Limited number of actuators required, Easy to Build 0.1 Design Domain Parameterization 0.05 0 Shape Optimization: -0.05 -0.1 • Thickness of passive elements 0 < tlower < ti < tupper ti -V (Contraction) • Passive Material Area Constrained to % of Amax -0.15 M Amax l i t upper Piezoelectric Elements i 1 Passive Elements -0.2 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 + V (Extension) Skin Elements 0.4 0.2 Optimization Problem 0.15 0.1 Objective function – Maximize Tip Deflection (TD) under actuation load J1 = Tip Deflection (TD) 0.05 0 0.2 TD -0.05 0.15 -0.1 – Minimize deflection under air load • Air load unchanged with changes in airfoil shape 0.1 -0.15 0.05 -0.2 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0 J2 = wT K w = Strain Energy (SE) – Two objective functions considered -0.05 Kw = fair -0.1 Single-criteria objective function: Max (J) = J1 = TD Multi criteria (Ratio) objective function : Max (J) -0.15 J1 TD J 2 SE -0.2 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 Sample Optimized Geometry: Comparison of Two Objective Functions 0.05 0.05 0.04 0.04 0.03 0.03 0.02 0.02 0.01 0.01 0 0 -0.01 -0.01 -0.02 -0.02 -0.03 -0.03 -0.04 -0.04 -0.05 -0.01 TD Objective Function Ratio Objective Function -0.01 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0 0.09 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.05 0.04 • DActuation ↑ with ↑ Amax using the TD objective function 0.03 0.02 0.01 0 Y -0.01 • DActuation ↓ with ↑ Amax using the Ratio objective function -0.02 -0.03 X -0.04 -0.05 -0.01 0 0.01 0.02 0.03 TD Objective Function 25 40 0.04 0.05 0.06 3 mm 0.07 0.08 0.09 20% 3 mmAmax 20% 3 mmAmax 65% 9 mmAmax 965% mmAmax 3 mm 10 2 9 mm 8 6 4 30 2 0 • DAirload ↓ with ↑ Amax for both objective functions Ratio Objective 9 mmFunction Airload Deflection (mm) Actuation Deflection (mm) 0 Comparison Of Objective Functions – Actuation Deflection 45 15 35 40 45 1.6 1.2 0.8 0.4 0 20 25 30 X/Y (%) 35 40 45 15 20 25 30 X/Y (%) 35 40 45 Effect of Actuator Thickness • DActuation ↑ with ↑ actuator thickness for both objective functions 7 6 • Increase in DActuation is smaller for the TD objective function because the passive structure is less rigid and the actuators are already operating close to their free strain Deflection (mm) Actuation Deflections 5 4 Ratio Objective Function 3 TD Objective Function 2 Airload Deflections 1 0 2 3 4 5 Actuator Thickness (mm) 6 • DAirload ↓ slightly with ↑ actuator thickness for both objective functions Discussion & Conclusions • Choice of optimal design – Ratio objective function gives solutions with very low airload deflections. – TD objective function solutions have a higher airload deflection, however the actuation deflection is considerably higher Best choice is an airfoil optimized using the TD objective function where the deflections due to the airloads are constrained by an upper limit. • Displacement of 6–8 mm under actuation achieved using four compliant mechanism units – 18-22% change in lift (calculated using X-FOIL) Prototype design Wire EDM Machining • Main Structure: 6061-T6 Aluminum (Fatigue Strength: 95 MPa) • 10 PICA-Thru Piezo Stack Actuators: P-010.20H Pro-Engineer Model Prototype Part Actuator Selection Physik Instrument Tubular Piezo Stack Actuator: P-010.20H Length: 27 mm, OD: 10 mm, ID: 5 mm Blocking Force: 1800 N Max Voltage: 1000 V Advertised Displacement at 1000 V: 30 μm Measured Displacement at 1000 V: 25-30 μm Vendor Data Measured Data Displacement (μm) 30 25 20 15 10 5 0 0 200 400 600 Voltage (V) 800 1000 ANSYS: Finite Element Analysis Active Elements Maximum Stress in Flexures: 35 MPa < 95 MPa Fatigue Strength Predicted Deflections - MATLAB Code: 5.6 mm - ANSYS: 4.0 mm Skin Design: Camber under Actuation Loads Moment applied at this section M = 200 N-m/m span (Low actuation load) Deformations due to o aerodynamic loads < 1 Change in EI less effect aEI Decrease skin EA more camber (unless baseline EI was very high) Skin bubbling aEA EI increased by factor of 10 EA reduced by factor of 100 M1 = 400 N-m/m span Deformations due to o aerodynamic loads < 1 SBB aEA M2 = 800 N-m/m span aEI aEI Camber under Moderate Actuation Loads Buckling boundary under actuation loads SBB aEA If skin has low EA, as actuation load increases, need higher EI to avoid buckling If EA reduced by factor of 50, and EI increased by factor of 600 Camber of ~ 3o for M1 o Camber due to air loads < 1 Camber of ~ 6o for M2 Skin Design Conclusions Process used is analogous to inverse design What should the properties of the skin be? ….such that -- global (camber) deformations under air load are not excessive -- local deformations due to surface pressure are not significant (no skin ‘bubbling’) -- local sections do not buckle under actuation loads -- actuation forces are not excessive for a desired camber The process followed gives us EA, EI, and max strain specs We can then go about designing a composite skin using these specs Low Modulus (silicone) face-sheets Spacer Flex-Core (Foam?) Composite Skin has low EA, but high EI, and can undergo high max strains Accomplishments since the last (2004) review • Shape optimization of series of compliant mechanisms within airfoil: - Examined effects of passive material constraint, mechanism geometry, and actuator thickness • Started construction of a bench-top model • Optimized skin properties to avoid buckling and localized transverse deflections under surface pressure loading while keeping actuation requirements low Planned Accomplishments for the remainder of 2005 • Complete prototype and conduct bench-top test • Optimization using dynamic analysis Technology Transfer Activities : • Paper accepted for publication in the 2005 AHS Forum 61 Proceedings • Presented paper at 2004 ASME Design Engineering Technical Conference, Salt Lake City, Utah • Presented paper at The 15th International Conference on Adaptive Structures and Technologies, October, 2004, Bar Harbor, Maine Recommendations at ‘04 review: • The task is a tough problem and shows potential, but needs to look at skin structures as to whether it is practical. It is appreciated to pay attention to last year comments. The task is unique, however potential payoff or practicality is debatable. Actions Taken : • Completed comprehensive study of optimal skin properties • Completed detailed design of practical design • Demonstration prototype has been constructed and will be evaluated in the lab under quasi-static and dynamic operating conditions Overall Accomplishments of Task 1.3 • Developed finite element models and optimization algorithms for trailing edge camber control – Topology optimization – Geometry optimization – Concurrent optimization • Calculated Lift/Drag increment of optimized designs using XFOIL • Developed a shape optimization method for simpler design • Studied flexible skin designs • Developed practical actuation system • Built prototype and bench-top testing Forward Path • Demonstrated that a controllable camber airfoil can be designed and fabricated. • Controllable camber, as a rotor morphing concept, is ready to move to CRI (formerly RITA) or other 6.2 type activity. The lessons learned and experiences gained can be used in industry-type development and testing activities. • The lessons learned on how to design structures compliant to actuation loads, stiff to aerodynamic loads, with deformable skins, and requiring modest actuation efforts, should be applied to other rotor morphing concepts. • Of particular interest to us (and we will propose as an RCOE renewal task) is the use of bistable mechanisms for control of blade twist and blade chord in the outboard regions. Bistable mechanisms provide large stroke with small actuation effort.