TEAM ZISSOU
presents….
“THE LOCATOR”
R. F. LOCATION SYSTEM
MIKE GOULD
KARA MCMILLIN
CHRIS SINKEY
JACOB WILTGEN
MARCUS PEARLMAN
R.F. Location Project
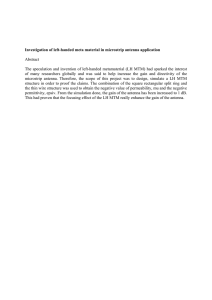
General Design
•
Transmitting Antenna
sends power signals
Receiving
Antennas
Power
• Antenna arrays receive
power signal
Rectifier
• Power is rectified and
amplified
Amplifier
•
DC power signal is
analyzed
68HC11
Microcontroller
•
2-D Location outputs to
Computer, LCD, or PDA
•
Bill Murray still confused.
Transmitting
Antenna
USB
Interface
Project Objectives
Optimal Objective
Create a fully functional 2D location system
Baseline Objective
Directional finding antenna
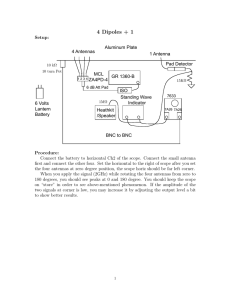
Chip Layout
DATA BUS
Receiver Output
10
RAM
ROM
FPGA
Control lines to
Antenna Array
68HC11
RAM:
•Temporary Receiver
Variables
HC11:
•Controls Antenna
Array Switching
•Interfaces with PC via
USB
•HC11 will read from
external memory.
ROM:
•Software Storage
Software
Extrapolate data from USB interface
Program computer workstation to
locate transmitter using C
Receives a bit pattern from each
receiving unit,
Translates into a vector
Interprets vector into a graphical location
Software continued
Output data to screen
Interpret data to find a direction within a
given boundary
Plot directions point for point on
Cartesian coordinate 2-D plane
Software Controlled Hardware
1 Antenna Array
68HC11 Microcontroller
► Includes
A/D converter, timers
USB interface between 68HC11 and computer
workstation
10-12 circularly polarized antennas
FPGA chip
► ROM
► RAM
Hardware
Antenna Design Details
Transmitting Antenna Design
Monopole design, linearly polarized.
Receiving Antenna Arrays
Circularly polarized, electrically scanning
Signal Processed by 68HC11 Microcontroller
Includes A/D converter
Array Schematic not yet finished
Schedule
Division of Labor
► Chris,
Marcus, Mike
Design and construction of transmitter, antenna
array
► Kara,
Jake
Software for receiver switching, vector
interpretation, visual output, interfacing
between receiver and PC, and differentiating
between I.D. tags.
Feasibility
4 Microprocessors 68HC11
4 FPGA’s - 4 @ $100 (if used)
4 32 K RAM - 4 @ $5
4 32 K ROM - 4 @ $5
4 FR4 boards - 4 @ $5
USB cables - 120 ft. ~ $40
Market Analysis
Possible Uses
• Warehouse Inventory Management
• Small Businesses
• Home
Tracking personal objects
Tracking animals (dogs, cats, hamsters)
• Monitoring hospital patient locations
Project Risks
Parasitic foreign disturbances
Other electronic devices may disturb antennas
Time management
No benchmark so may take longer than expected
Additional Functionality
Specific ID
Tracking multiple tags
Determining location of objects in 3-D
Finding Shamu
Questions?
 0
0