A Beacon-Less Location Discovery Scheme for Wireless Sensor Networks
advertisement

A Beacon-Less Location Discovery Scheme for
Wireless Sensor Networks
Peng Ning
Department of Computer Science
North Carolina State University
Email:pning@ncsu.edu
Lei Fang, Wenliang Du
Department of Electrical Engineering
and Computer Science
Syracuse University
Email: {lefang,wedu}@ecs.syr.edu
in sensor networks. In the past several years, a number of
location discovery protocols have been proposed to reduce
or completely remove the dependence on GPS in wireless
sensor networks [3], [6], [9], [15]–[18], [21], [22]. Most of
these schemes share a common feature: they use some special
nodes, called beacon nodes, which are assumed to know
their own locations (e.g., through GPS receivers or manual
configuration). Other sensors discover their locations based on
the information provided by these beacon nodes.
Although the overall cost of beacon-based location discovery schemes is significantly less than the GPS-like schemes,
the cost for each beacon node is still expensive. To have a
more robust and accurate positioning system, the number of
beacon nodes tend to increase. Therefore, it is appealing to
achieve location discovery without using beacon nodes.
In general, a positioning system consists of two components:
one is the reference points, whose coordinates are known;
the other is the spatial relationship between sensors and the
reference points. For example, in Global Positioning System,
the satellites are the reference points, and the time of arrival
reveals the relationship between a GPS receiver and the
satellites. In beacon-based positioning system, beacons are
reference points, and relationships between a sensor and the
reference points include time of arrival, time difference of
arrival, angle of arrival, received signal strength, and hopbased distance, etc. For a positioning system that does not use
beacon nodes, we still need to find some type of reference
points with which sensors can find their locations.
We have observed that when sensors are deployed, the
coordinates of the deployment points are usually known. Let
us look at a deployment method that uses an airplane to
deploy sensor nodes. The sensors are first pre-arranged in
a sequence of smaller groups. These groups are dropped
out of the airplane sequentially as the plane flies forward.
This is analogous to parachuting troops or dropping cargo
in a sequence. The positions where each sensor group are
dropped out of the airplane are referred to as deployment
points; their coordinates can be pre-determined and stored
in sensors’ memories prior to the deployment. Then during
the deployment, using the GPS receivers on the airplane, we
can ensure that the actual deployment points are the same as
the pre-determined coordinates. We will use these deployment
Abstract— In wireless sensor networks (WSNs), sensor location
plays a critical role in many applications. Having a GPS receiver
on every sensor node is costly. In the past, a number of
location discovery schemes have been proposed. Most of these
schemes share a common feature: they use some special nodes,
called beacon nodes, which are assumed to know their own
locations (e.g., through GPS receivers or manual configuration).
Other sensors discover their locations based on the information
provided by these beacon nodes.
In this paper, we show that efficient location discovery can be
achieved in sensor networks without using beacons. We propose
a beacon-less location discovery scheme. based on the following
observations: in practice, it is quite common that sensors are
deployed in groups, i.e., sensors are put into n groups, and
sensors in the same group are deployed together at the same
deployment point (the deployment point is different from the
sensors’ final resident location). Sensors from the same group
can land in different locations, and those locations usually follow
a probability distribution that can be known a priori. With
this prior deployment knowledge, we show that sensors can
discover their locations by observing the group memberships
of its neighbors. We model the location discovery problem as
a statistical estimation problem, and we use the Maximum
Likelihood Estimation method to estimate the location. We have
conducted experiments to evaluate our scheme.
Keyword: System Design.
I. I NTRODUCTION
Sensor networks have been proposed for various applications. In many of these applications, nodes need to find
their locations. For example, in rescue applications, rescue
personnel can perform their tasks only if location of the
hazardous event (reported by sensors) is known. Location is
also important for geographic routing protocols, in which the
location information (in the form of coordinates) is used to
select the next forwarding host among the sender’s neighbors [11]–[13], [20], [23]. Because of the constraints on
sensors, finding location for sensors is a challenging problem.
The location discovery problem is referred to as localization
problem in the literature.
The Global Positioning System (GPS) [10] solves the
problem of localization in outdoor environments for PC-class
nodes. However, due to cost, it is highly undesirable to have
a GPS receiver on every sensor node. This creates a demand
for efficient and cost-effective location discovery algorithms
1
0
50
150
250
350
450
550
600
50
00
11
11
00
11
00
11
00
11
00
11
00
150
00
11
11
00
O
11
00
11
00
11
00
11
00
250
00
11
11
00
D
11
00
G
11
00
11
00
11
00
A
350
450
00 00
11
11
C
11 00
00
11
E
11 F00
00
11
H
I
11 00
00
11
P
11
11 00
00
11 00
00
11
B
550 600
The rest of the paper is organized as follows: the next
section overviews the existing work on location discovery.
Section III presents the modeling of deployment knowledge.
Section IV describes our beacon-less scheme. Section V
presents the evaluation results. Section VI compares the beaconless scheme with the existing localization schemes. Finally
we conclude and lay out some future work in Section VII.
00
11
11
00
11
00
11
00
11
00
11
00
II. R ELATED W ORK
In the past several years, a number of location discovery
protocols have been proposed to reduce or completely remove
the dependence on GPS in wireless sensor networks [1], [3],
[4], [6], [8], [9], [15]–[19], [21], [22].
Most solutions for location discovery in sensor networks
require a few nodes called beacons (they are also called
anchors or reference points), which already know their absolute locations via GPS or manual configuration. The density
of the anchors depends on the characteristics and probably
the budget of the network since GPS is a costly solution.
Anchors are typically equipped with high-power transmitters
to broadcast their location beacons. The remainder of the
nodes then compute their own locations from the knowledge
of the known locations and the communication links. Based on
the type of knowledge used in location discovery, localization
schemes are divided into two classes: range-based schemes
and range-free schemes.
Range-based protocols use absolute point-to-point distance
or angle information to calculate location between neighboring
sensors. Common techniques for distance/angle estimation
include Time of Arrival (TOA) [10], Time Difference of
Arrival (TDOA) [1], [8], [19], Angle of Arrival (AOA) [17],
and Received Signal Strength (RSS) [1]. While producing
fine-grained locations, range-based protocols remain costineffective due to the cost of hardware for radio, sound,
or video signals, as well as the strict requirements on time
synchronization and energy consumption.
Alternatively, coarse-grained range-free protocols are costeffective because no distance/angle measurement among nodes
is involved. In such schemes, errors can be masked by fault
tolerance of the network, redundancy computation, and aggregation [9]. A simple algorithm proposed in [3] and [4] computes location as the centroid of its proximate anchor nodes.
It induces low overhead, but high inaccuracy as compared to
others. An alternate solution, DV-Hop [18], extends the singlehop broadcast to multiple-hop flooding, so that sensors can
find their distance from the anchors in terms of hop counts.
Using the information about the average distance per hop, sensors can estimate their distance from the anchors. Amorphous
positioning scheme [15] adopts a similar strategy as DV-Hop;
the major difference is that Amorphous improves location estimates using offline hop-distance estimations through neighbor
information exchange.
Another existing range-free scheme is APIT algorithm [9].
APIT resolves the localization problem by isolating the environment into triangular regions between anchor nodes. A node
uses the point-in-triangle test to determine its relative location
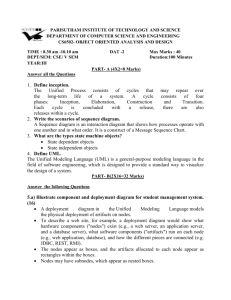
Fig. 1. An Example of Group-based Deployment (each dot represents a
deployment point).
points as the reference points.
Next, we need to find a way to allow each sensor to establish
a spatial relationship with the reference points, so that sensors
can use this relationship (along with the coordinates of the
reference points) to find their own locations. We have observed
the following facts: after the deployment, sensors usually do
not land in locations that are uniformly random across the
whole deployment area, they tend to be distributed in areas
around their deployment points. Therefore, sensors in different locations will observe different types of neighbors (i.e.
neighbors from different groups). For example, assume that
the deployment points are arranged in a grid style depicted
in Figure 1, and a group of nodes are deployed at each
deployment point. After the deployment, a node at location
O will find out that more of its neighbors are from group A
and D than from group H and I; on the contrary, a node at
location P has more neighbors from group H and I than from
A and D. This means, knowing how many of its neighbors are
from each deployment group, a sensor can derive its spatial
relationship with the deployment points.
To derive such a spatial relationship, we need to have
a prior knowledge about how sensors from each group are
distributed after the deployment, i.e., how likely can they
land in a location z meters away from the their deployment
points? In practice, given the methods and the conditions of
the deployment, such knowledge can usually be modeled using
a probability distribution function (pdf).
Based on the prior knowledge about the deployment points
and the pdf of the deployment, we propose a beacon-less
location discovery scheme, KPS (deployment Knowledgebased Positioning System). In our scheme, each sensor first
finds out the number of its neighbors from each group. We
call this the observation of a sensor. With this observation, a
sensor estimates a location based on the principle that the
estimated location should maximize the probability of the
observation. This is exactly the principle of the maximum
likelihood estimation (MLE). Therefore, we use the MLE
method to conduct the location estimation. Our results have
shown that KPS can achieve a decent accuracy.
2
with triangles formed by anchors and thus narrows down the
area in which it probably resides. APIT defines the center of
gravity of the intersection of all triangles that a node resides
in as the estimated node location.
Our proposed scheme is significantly different from the
existing schemes. The major advantage of our scheme is the removal of the dependency on the expensive beacon (or anchor)
nodes. However, our scheme does not intend to replace the
existing beacon-based schemes, because there are situations
when the accurate deployment knowledge is difficult to obtain
prior to deployment. If indeed the deployment knowledge can
be obtained, our scheme can substantially reduce the cost
associated with the expensive beacon nodes.
Rao et al. also proposed a localization scheme without
beacons [20]. In this scheme, nodes flood the network to
discover the distance (hops) between perimeter nodes. Compared to this flooding scheme, our scheme is more efficient in
communications, because in our scheme, nodes only need to
communicate with their neighbors once.
−5
x 10
7
6
5
4
3
2
1
0
300
250
300
200
250
150
200
150
100
100
50
50
0
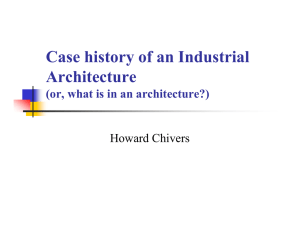
Fig. 2.
0
Deployment distribution for one group.
−6
x 10
3
2.5
III. M ODELING OF THE D EPLOYMENT K NOWLEDGE
2
We assume that sensor nodes are static once they are
deployed. We define deployment point as the point location
where a sensor is to be deployed. This is not the location
where this sensor finally resides. The sensor node can reside
at points around this deployment point according to a certain
probability distribution. As an example, let us consider the case
where sensors are deployed from a helicopter. The deployment
point is the location of the helicopter. We also define resident
point as the point location where a sensor finally resides.
1.5
1
0.5
600
500
600
400
500
300
400
300
200
200
100
100
0
Fig. 3.
A. Group-based Deployment Model
In practice, it is quite common that nodes are deployed
in groups, i.e., a group of sensors are deployed at a single
deployment point, and the probability distribution functions
of the final resident points of all the sensors from the same
group are the same.
In this work, we assume such a group-based deployment,
and we model the deployment knowledge in the following (we
call this model the group-based deployment model):
1) N sensor nodes to be deployed are divided into n equal
size groups so that each group, Gi , for i = 1, . . . , n
is deployed from the deployment point with index i.
To simplify the notion, we also use Gi to represent
the corresponding deployment point, and let (xi , yi )
represent its coordinates.
2) Locations of the deployment points are pre-determined
prior to deployment. Their coordinates are stored in each
sensor’s memory. The deployment points can form any
arbitrary pattern. For example, they can be arranged in
a square grid pattern (see Figure 1), a hexagonal grid
pattern, or other irregular patterns.
3) During deployment, the resident point of a node k
in group Gi follows a probability distribution function
fki (x, y | k ∈ Gi ) = f (x−xi , y−yi ). An example of the
pdf f (x, y) is a two-dimensional Gaussian distribution.
0
The overall deployment distribution over the entire region.
Figure 2 shows an example of two-dimensional Gaussian
distribution at the deployment point (150, 150).
B. Deployment Distribution
There are many different ways to deploy sensor networks,
for example, sensors could be deployed using an airborne
vehicle. The actual model for deployment distribution depends
on the deployment method.
In this paper, we model the sensor deployment distribution
as a Gaussian distribution (also called Normal distribution).
Gaussian distribution is widely studied and used in practice.
Although we only employ the Gaussian distribution in this
paper, our methodology can also be applied to other distributions.
We assume that the deployment distribution for any node k
in group Gi follows a two-dimensional Gaussian distribution,
which is centered at the deployment point (xi , yi ). Namely,
the mean of the Gaussian distribution µ equals (xi , yi ), and
the pdf for node k in group Gi is the following [14]:
1 −[(x−xi )2 +(y−yi )2 ]/2σ2
e
fki (x, y | k ∈ Gi ) =
2πσ 2
= f (x − xi , y − yi ),
3
where σ is the standard deviation, and f (x, y) =
1
−(x2 +y 2 )/2σ 2
. Without loss of generality, we assume that
2πσ 2 e
the pdf for each group is identical, so we use fk (x, y | k ∈ Gi )
instead of fki (x, y | k ∈ Gi ) throughout this paper.
Although the distribution function for each single group
is not uniform, we still want the sensor nodes to be evenly
deployed throughout the entire region. By choosing a proper
distance between the neighboring deployment points with
respect to the value of σ in the pdf, the probability of finding
a node in each small region can be made approximately
equal. Assuming that a sensor node is selected to be in a
given group with an equal probability, the average deployment
distribution (pdf) of any sensor node over the entire region is:
Note that, given θ, all Xi are mutually independent. Therefore,
fn (a | θ)
=
1X
fk (x, y | k ∈ Gi ).
n i=1
(2)
The above probability indicates how likely it is to observe
X1 = a1 , . . . , Xn = an at location θ. The function fn (a |
θ) describes the joint pdf for every observed vector a =
(a1 , . . . , an ) in the sample. When fn (a | θ) is regarded as
a function of θ for a given vector a, in statistics, it is called
the likelihood function.
The goal of the location discovery now becomes an estimation problem, namely, we need to select the parameter θ from
the parameter space Ω. We should certainly not consider any
value of θ ∈ Ω for which it would be impossible to obtain
the vector a that was actually observed. Instead it would be
natural to try to find a value of θ for which the probability
density fn (a | θ) is large, and to use this value as an estimate
of θ. For each possible observed vector a, we are led by this
reasoning to consider a value of θ for which the likelihood
function fn (a | θ) is a maximum and to use this value as
an estimate of θ. This is the concept of maximum likelihood
estimation (abbreviated as MLE).
The method of MLE was introduced by R. A. Fisher in
1912, it is by far the most widely used method of estimation
in statistics. The principle of MLE is simple. That is to find
the parameter values that make the observed data most likely.
In other words, MLE is a method by which the probability distribution that makes the observed data most likely is
sought. Details of MLE can be found in most of the statistics
textbooks [5].
Let us see how to compute the likelihood function fn (a | θ)
when the vector a is observed. Let gi (θ) be the probability
that a sensor from group Gi can land within the neighborhood
of point θ (we will show how to compute gi (θ) later in this
section). Therefore, the probability that exactly ai sensors are
within the neighborhood of point θ is the following (where m
is the number of sensors deployed at each deployment point):
m
(m−ai )
a
f (Xi = ai | θ) =
(gi (θ)) i (1 − gi (θ))
ai
n
foverall (x, y) =
Pr(X1 = a1 | θ) · · · Pr(Xn = an | θ).
(1)
To see the overall distribution of sensor nodes over the entire
deployment region, we have plotted foverall in Eq. (1) for
6 × 6 = 36 groups over a 600m × 600m square region with
the deployment points 2σ = 100m apart (assuming σ = 50).
We use the grid strategy to arrange the deployment points as
depicted in Figure 1. Figure 3 shows the overall distribution.
From Figure 3, we can see that the distribution is almost
flat (i.e. nodes are fairly evenly distributed) in the whole region
except near the boundaries.
IV. A B EACON -L ESS L OCATION D ISCOVERY S CHEME
After sensors are deployed, each sensor broadcasts its
group id to its neighbors, and each sensor can count the
number of neighbors from Gi , for i = 1, . . . , n. Assume
that a sensor finds out that it has a1 , . . . , an neighbors from
group G1 , . . . , Gn , respectively. The question is whether this
information, along with the deployment knowledge, can help
the sensor estimate its own location.
Intuitively speaking, the observation of the neighbors’ group
ids is helpful. For example, if a sensor sees many of its
neighbors from group Gj but zero neighbors from group Gk ,
we will know that the sensor is close to the deployment
point of Gj , and it is far away from the deployment point
of Gk . However, we need a systematic method to use this
neighborhood information to calculate the sensor’s location
directly.
Assume that the location of the sensor of concern is θ =
(x, y). Given the number (m) of nodes deployed in each group
and the pdf function of the deployment, we can compute the
probability that a1 , . . . , an nodes (from group G1 , . . . , Gn ,
respectively) can be observed by a node at the location θ. Let
Xi be the random variable that represents the number of nodes
from group Gi that are neighbors to the node at location θ. Let
a = (a1 , . . . , an ) be a vector representing the observation. The
probability that a is observed by a node at θ is the following:
Therefore, according to Equation (2), the likelihood function
fn (a | θ) can be computed using the following equation:
fn (a | θ) =
=
n
Y
f (Xi = ai | θ)
i=1
n Y
i=1
m
(m−ai )
a
.
(gi (θ)) i (1 − gi (θ))
ai
The value of θ that maximizes the likelihood function
fn (G | θ) will be the same as the value of θ that maximizes
log fn (G | θ), because logarithm is an increasing function.
Therefore, it will be more convenient to determine the MLE
fn (a | θ) = Pr (X1 = a1 , . . . , Xn = an | θ) .
4
by finding the value of θ that maximizes
likelihood function L(θ) and its first derivatives. In section IVC and IV-D, we will show how to simplify L(θ) and its first
derivatives using approximation and table-lookup approaches.
In the next subsections, we describe two algorithms that
achieve a much better efficiency, however, at the cost of
the accuracy. These two algorithms can be used as a standalone approach to estimate the location when the accuracy
requirement is not high. Moreover, they can also be used to
find the starting point for the gradient descent method.
2) A Geometric Approach: From a geometric perspective,
if a sensor can get its distance from at least three deployment
points, it can calculate its position. We will give a much
simplified scheme to estimate a sensor’s distance from a
deployment point. Assume that the sensor has observed ai
neighbors from the deployment group Gi , it can use the MLE
to find the distance z, such that the probability to observe ai
neighbors from group Gi is maximized.
We use Li (θ) to represent the log likelihood function, where
θ represents the location of the sensor. Based on Equation (3),
we have
Li (θ) = log f (Xi = ai | θ)
m
= log
+ ai log gi (θ)
ai
+(m − ai ) log(1 − gi (θ)).
L(θ) =
log fn (G | θ)
X
n
n
X
m
log
ai log gi (θ))
=
+
ai
i=1
i=1
+
n
X
(m − ai ) log(1 − gi (θ)).
(3)
i=1
There are various ways to find the θ that maximizes L(θ).
When L(θ) is differentiable and the maximal exists, it must
satisfy the following partial differential equations known as
the likelihood equations:
∂L(θ)
=0
∂x
and
∂L(θ)
= 0.
∂y
This is because the definition of maximum or minimum
of a continuous differentiable function implies that its first
derivatives vanish at such points.
If the first derivative has a simple analytic form, we can
solve the above likelihood equations to find the value for
θ = (x, y). However in practice, often we cannot derive an
equation with a simple analytic form for its first derivative.
This is especially likely if the model is complex and involves
many parameters and/or complex probability functions. As
we will show later when we describe how to compute gi (θ),
L(θ) is indeed very complicated. In such situations, the MLE
estimate must be sought numerically. We will describe several
numerical methods in the next subsection.
Let us use z to represent the distance from θ to the
deployment point of Gi . Let g(z) represent the probability that
a sensor from group Gi can land within a circle (with radius
R), the center of which is z distance from the deployment
point of Gi . Because g(z) = gi (θ), we can use z to replace θ
in the above equation:
m
Li (z) = log
+ ai log g(z)
ai
+(m − ai ) log(1 − g(z)).
A. Finding Maximum
1) Gradient Descent: Gradient descent [7], also known
as the method of steepest descent, is a common method in
numerical analysis. The key idea of gradient descent is to find
the maximum of a function based on the information of its
gradient. Intuitively, we can imagine that a two-dimensional
function is represented as a surface in a three-dimensional
space, and the maximum point (also called peak) holds a
zero gradient. The goal of the gradient descent method is
to find a shortest path to reach the peak from a selected
starting point. Usually the path consists of many iteration
steps, and at each step, the choice of the direction is where
the function increases most quickly. The whole process is like
hill climbing, and the goal is to reach the top of the hill using
the minimal amount of steps. To reduce the computation cost,
numerous optimization schemes have been proposed to find
a shortest path to the maximum point. One method is the
conjugate gradient method [2], which usually converges faster
to the maximum point than the gradient descent method. These
optimizations are beyond the scope of this paper. In our work,
we only focus on the most basic gradient descent method.
The gradient descent method, if used improperly, can be
computationally intensive, and thus not suitable for resourceconstrained sensor nodes. The cost of the gradient descent
method in our scheme can be significantly affected by the
selection of the starting point and the computation of the
To find z, such that Li (z) is maximized, we let the first
derivate of Li (z) be zero:
dLi (z)
=0
dz
Therefore, we get the following result:
ai
.
g(z) =
m
When g(z) is complicated, we can use the table-lookup
approach to find z given ai and m, namely, we pre-calculate
g(z) for various values of z, and store the table of results in
sensor’s memory. Once ami is known after the deployment, a
sensor can find z by looking up the value of z from the table.
If the accuracy requirement on z is not so high, the amount
of memory needed for such a table is not so large.
As we will see from the next subsection, using regression,
we can approximate g(z) using a Gaussian distribution. Therefore, finding z from ai and m is quite simple.
Once we get the distance of the sensor from three deployment points, we can find the location of the sensor using the
coordinates of these deployment points. The computation of
this scheme is quite efficient.
5
ℓ
i
ℓ
R
z
θ
(x, y)
ℓ
(a) i is outside of the circle (z > R)
Fig. 4.
where fR (ℓ | ni ∈ Gi ) is defined as the following Gaussian
distribution:
R
z
i
fR (ℓ | ni ∈ Gi ) =
θ
(x, y)
ℓ
Using geometry knowledge, it is not difficult to derive the
following equation for Larc (ℓ, z, R):
2
ℓ + z 2 − R2
−1
Larc (ℓ, z, R) = 2ℓ cos
.
2ℓz
(b) i is inside of the circle (z < R)
Probability of nodes residing within a circle.
We define g(z | ni ∈ Gi ) as the probability that the sensor
node ni from group i resides within the θ-circle, where z is
the distance between θ and the deployment point of group Gi .
To calculate gi (z | ni ∈ Gi ), we integrate the probabilities
over all the ring areas (for different ℓ) within the θ-circle.
Therefore, when z > R (as shown in Figure 4.a),
3) Small area search approach: In the above geometric approach, because we only considered three deployment points,
the accuracy might not be desirable, especially when the
number of the neighbors from the other deployment points is
not negligible. That is, the location we find might not be the
maximum point of the likelihood function L(θ). To improve
the accuracy, we use the point (X0 , Y0 ) found by the geometric
approach as an initial point, and then conduct a search in the
nearby locations to find the maximum of L(θ), i.e., the value
of L(θ) will be computed on the following points:
X = X0 + i ∗ LEN
−RG ≤ i ≤ RG
Y = Y0 + j ∗ LEN
−RG ≤ j ≤ RG,
1 − ℓ22
e 2σ .
2πσ 2
g(z | ni ∈ Gi )
Z
=
z+R
fR (ℓ | ni ∈ Gi ) · Larc (ℓ, z, R) dℓ.
z−R
When z < R (as shown in Figure 4.b),
g(z | ni ∈ Gi )
Z R−z
ℓ · 2πfR (ℓ) dℓ
=
0
Z z+R
fR (ℓ | ni ∈ Gi ) · Larc (ℓ, z, R) dℓ.
+
where LEN is the length of each step (e.g. we can set it to 2
to 5 meters), and RG determines the search range. We use the
number of steps along each direction to represent the range.
We will pick the point the has the maximum of L(θ)
as the node’s estimated location. The computational cost of
the search depends on the number of steps and the step
length. This approach will bring better result than the simple
geometric scheme at the cost of computations. A performance
comparison will be given later in Section V.
R−z
Putting both z > R and z < R cases together, we have the
following:
g(z | ni ∈ Gi )
(R−z)2
− 2σ2
= 1{z < R} 1 − e
Z z+R
fR (ℓ | ni ∈ Gi ) · Larc (ℓ, z, R) dℓ,
+
B. Computing gi (θ)
(4)
|z−R|
We use z to represent the distance from point θ to the
deployment point of group Gi . We define Ψ as the set of
all deployment groups in the KPS scheme. We draw two
circles. The first circle has a radius ℓ, and is centered at i,
the deployment point of group Gi . We call this circle the icircle. The second circle has a radius R, and is centered at
θ = (x, y). We call this circle the θ-circle. When two circles
intersect, we call the i-circle’s arc within the θ-circle the Larc ,
and we use Larc (ℓ, z, R) to represent the length of the arc. We
now consider an infinitesimal ring area Larc (ℓ, z, R) · dℓ. The
bold areas in Figure 4.a and 4.b show the infinitesimal ring
areas.
Based on the two-dimensional Gaussian distribution, the
probability that a node ni from group i ∈ Ψ with deployment
point (xi , yi ) resides within this small ring area is
where 1{·} is the set indicator function1 .
Therefore, gi (θ), the probability that a node from the
deployment group Gi can land within the neighborhood of
point θ, can be computed in the following:
p
gi (θ) = g( (x − xi )2 + (y − yi )2 | ni ∈ Gi ).
For the sake of simplicity, we use g(z) to represent g(z |
ni ∈ Gi ) in the rest of this paper, when it is obvious to see
from the context that we are referring to the nodes in group Gi .
The formula for g(z) is quite complicated, and we cannot
afford to compute it using Equation (4) in sensor networks.
Simplifying the analytical representation of g(z), if possible,
is difficult and beyond the scope of this paper. In this paper, we
propose two approaches to improve the computations. The first
is the table-lookup approach, and the second is the regression
approach.
1 − ℓ22
e 2σ · Larc (ℓ, z, R) · dℓ
2πσ 2
= fR (ℓ | ni ∈ Gi ) · Larc (ℓ, z, R) · dℓ,
1 The
6
value of 1{·} is 1 when the evaluated condition is true, 0 otherwise.
g(z) is perfectly matched with the gaussion function with σ = 54.05
C. Simplifying g(z): Table-lookup Approach
0.4
g(z)
gaussion estimation
Since g(z) only depends on R and σ, which are known prior
to the deployment, we can pre-calculate g(z) offline for each
z value, and store the results as a table in sensor’s memories.
When a sensor needs the result for a specific value, e.g., z0 ,
it can use z0 as the index to look up the value of g(z0 ) from
the table. The computation takes only constant time.
Although the range of z is from 0 to +∞, the values of g(z)
beyond certain range is negligible (our analysis shows that
g(z) is an exponentially decreasing function). Let α represent
the size of the range, in which g(z) has non-negligible values.
We divide this range into ω equal-size sub-ranges, and store
the ω + 1 dividing points into a table. When a sensor needs
to compute g(z0 ), it first finds the sub-range that contains z0
by looking up the table; then it treats the two end-points of
the sub-range as the two ends of a straight line, and finds the
value corresponding to z0 on that line. The sensor uses this
value for g(z0 ).
As we can see that the precision of this approach depends
on the size of the sub-range, the smaller the size is, the
better. However, smaller sub-range also means more memory
is needed for the whole table. Assume each value of g(z)
can be represented by two bytes, then we need 2000 bytes of
memory to store the table if we divide the range into 1000
pieces. In fact, in our experiments, when the range is divided
into 200 pieces (i.e., using 400 bytes of memory), the accuracy
is almost not affected.
Note that g(z) does not depend on the deployment points;
therefore, as long as the deployment follows the same p.d.f.,
the same g(z) table can be used, regardless of how the
deployment points are arranged.
0.35
0.3
g(z)
0.25
0.2
0.15
0.1
0.05
0
0
20
40
60
80
100
120
140
160
180
200
z
Fig. 5.
Gaussian function with Ω=54.05 really matches the g(z)
6
Average Regressing Error
Regressing Error standard deviation
Regression Error (%)
5
4
3
2
1
0
10
20
30
40
50
60
70
80
90
100
R
D. Simplifying g(z): Regression Approach
Fig. 6.
In the regression approach, we want to find a much simple
representation for g(z). Such representation does not need to
produce the exact same values as the original g(z), as long as
it is a reasonable approximation.
After plotting g(z), we have observed that the shape of
g(z) is very much like a Gaussian distribution with mean
zero. Therefore we use the following Gaussian distribution to
conduct the regression (the Guaissian distribution is adjusted
by multiplying πR2 ):
Regression Errors
values of R (Figure 6). The figure shows that when R is not
too large, the regression is quite accurate.
The above simplification can significantly reduce the costs
for computing L(θ); however, being able to compute L(θ)
efficiently is not sufficient. If the gradient descent method is to
be used to find the maximum of L(θ), we should also be able
to compute the first derivative of L(θ) efficiently.2 Let z 2 =
(x − xi )2 + (y − yi )2 , where (xi , yi ) is the deployment point
of group Gi . The first derivative on x, ∂L(θ)
∂x , can be derived
in the following (the first derivative on y can be similarly
derived):
1 −z2 /2Ω2
e
) · πR2 .
2πΩ2
The goal of the regression is to find out the standard
deviation Ω of the regressed Gaussian distribution, such that
the error between g(z) and the regressed distribution function
is minimized. We get the following relationships:
R2
Ω = 6.328 2 + σ
σ
For example, when R = 40, σ = 50, the value of Ω =
54.05. We plot both g(z) and our regression result in Figure 5.
The results show that the regression is very accurate for R =
40 and σ = 50. We also plot the mean difference between
the original g(z) values and the regression results for various
g(z) = (
n
∂g (θ)
n
∂g (θ)
i
X (m − ai ) i
∂L(θ) X ai ∂x
∂x
=
−
,
∂x
g
(θ)
1
−
g
(θ)
i
i
i=1
i=1
2 Although we can approximately calculate the first derivative of g(z) at
g(z1 )−g(z0 )
, where z1 is another point close to z0 , the
point z0 by using
z1 −z0
computation is less accurate than the direct calculation.
7
where
∂gi (θ)
∂x
is equivalent to m, the number of nodes deployed in each
group (because we have fixed the deployment area and the
number of deployment groups). Therefore, in this experiment,
we investigate how the estimation error changes when m
changes.
can be calculated in the following:
R2 −((x−xi )2 +(y−yi )2 )/2Ω2
e
(x − xi )
−2Ω4
−1
= gi (θ) 2 (x − xi ).
Ω
Combining the above two equations together (and also
applying the similar method to y), we get the following:
=
∂L(θ)
∂x
∂L(θ)
∂y
14
Estimation Error (meters)
∂gi (θ)
∂x
n
=
=
−1 X ai − mgi (θ)
(x − xi ),
Ω2 i=1 1 − gi (θ)
−1
Ω2
n
X
i=1
ai − mgi (θ)
(y − yi ),
1 − gi (θ)
Therefore, once we know how to compute g(z), we can also
compute the first derivative of L(θ). To further improve the
performance, we can use the table-lookup approach to store
the table of the Gaussian distribution into sensor’s memory.
However, our experiments show only 10% of the performance
improvement. This is because the computation on g(z) is not
the major cost.
R=40
R=50
R=60
12
10
8
6
4
2
100
200
300
400
500
600
700
800
900
1000
m
Fig. 7.
V. E VALUATION
Estimation errors vs. m (R = 40, 50, and 60).
For each experiment, we fix σ = 50, and then change m
from 100 to 1000. We repeat the same experiment for R = 40,
50, and 60. The simulation results are depicted in Figure 7.
The figure shows that our estimation is quite accurate. For
example, when m = 400 and R = 40, the estimation error is
only 8 meters, which equals 0.2R. The figure also shows that
the accuracy of the location estimation becomes better when
m increases, i.e., each sensor can observe more nodes in its
neighborhood.
In practice, if we do not have enough sensors to deploy
to reach the desired node density, we can still achieve the
desired density by deploying dummy nodes along with the
sensor nodes. A dummy node is a low-cost node, whose only
functionality is to broadcast its group identity to its neighbors.
A dummy node does not need to find its own location, nor
does it need to carry out sensing or computing tasks. Its only
goal is to increase the sample size, such that the sensors in
its neighborhood can estimate their location more accurately.
Therefore, the cost of a dummy node can be much lower than
a sensor node.
This section provides a detailed quantitative analysis evaluating the performance of our beacon-less location discovery
scheme. The obvious metric for the evaluation is the location
estimation error. We have conducted a variety of experiments
to cover different system configurations including varying the
node density and varying the transmission range. We have
also investigated how the boundary effects affect the accuracy
of the location estimation. Moreover, we have compared the
performance of the three approaches described in Section V-D.
In our experiments, the deployment area is a square plane
of 1000 meters by 1000 meters. In this paper, we only use
the square grid pattern for our deployment: namely, the plane
is divided into 10 × 10 grids of size 100m × 100m; centers
of these grids are chosen as deployment points. Figure 1
shows our deployment strategy. Similar experiments can be
conducted for other deployment patterns.
We still use m to represent the number of nodes in each
group, R to represent the transmission range. We set the σ
of the Gaussian distribution to 50 in all of the experiments.
We then randomly generate the sensor networks based on the
deployment model.
In the experiments we calculate ∆Z, the average distance
between a node’s actual position and estimated position. We
use ∆Z as the average estimation error of KPS. In our
simulation, we estimate the locations for all the nodes in the
plane, and then we calculate the average errors. The numerical
approach used in all the experiments is gradient descent unless
it says otherwise.
B. Estimation Error when Varying Transmission Range
Another way to increase the sample size is to increase
the transmission range R. When R increases, the number of
neighbors for each sensor will increase. In this experiment,
we investigate how R affects the estimation accuracy. We fix
m = 400, and vary R from 40 meters to 120 meters. The
simulation results are depicted in Figure 8.
The figure shows an interesting trend: when R increases
from 40 to 90, the estimation error decreases without a
surprise. However, starting from R = 90, the estimation
error increases. This can be intuitively explained using an
extreme-case example: assume that R = ∞, which means
that all the sensor nodes can observe exactly the same set of
A. Estimation Error when Varying Node Density
Because KPS is based on statistical methods, the sample
size is critical to the accuracy of the estimation. In KPS, the
sample size is decided by the density of the network, which
8
16
Estimation Error (meters)
7
Estimation Error (meters)
6.5
6
5.5
5
4.5
include boundary
exclude boundary
14
12
10
8
4
6
3.5
3
40
50
60
70
80
90
100
110
4
100
120
200
300
Fig. 8.
400
500
600
700
800
900
1000
m
R
Estimation errors vs. R (m = 400).
Fig. 9.
neighbors (i.e., all the other nodes in the network). Therefore,
the estimated location for all the sensors will be the same
(actually it will be the center of the deployment area).
The extreme-case example indicates that when R increases
to infinite, the estimation error will increase, and eventually
will converge to a constant, when the center of the deployment
area is selected as every sensor’s estimated location. This
is largely due to the boundary effects that we are going to
discuss in the next experiment. Namely, when R increases,
more and more nodes will be affected by the boundary effects
because their neighboring areas cover the areas outside of the
deployment area, where the node density is close to zero.
Therefore, for those nodes, the difference of their observations
becomes smaller and smaller while the difference of their
locations is still constant. We will further investigate the
boundary effects in our experiments.
The fact that Figure 8 has a minimum point tells us we
should choose the proper R in practice; just increasing R won’t
always give us better results.
Boundary (R = 40 and σ = 50).
cost is most expensive. The geometric approach is the least
expensive one, but it produces the worst estimation error.
The small-area-search approach is in the middle. In this
experiment, we quantitatively compare the computation cost
and the accuracy of these three approaches.
1) Computation Cost: The algorithms for the three approaches are tested on a PC with Intel P4 2.8G hz CPU and
1G memory. We set R = 40 and m = 100. We measure
the average time for a sensor to find its location. Their
performance comparisons are shown in Table I.
TABLE I
C OMPARISON OF THE T HREE N UMERICAL A PPROACHES .
Algorithm
Geometric Method
Small Area Search (1 step )
Small Area Search (2 steps)
Small Area Search (3 steps)
Small Area Search (4 steps)
Gradient Decent
C. Estimation Error vs. Boundary Effects
Boundary is also a factor we must consider. Because there
are less nodes on the boundaries, the variance of a node’s
neighbors is large compared to the nodes near the center. So
it’s less accurate for nodes to determine their positions with
their observations.
In the experiment, we calculate the errors in two different
ways: one includes the nodes on the boundary, and the other
does not. The boundary nodes are defined as those that are
within 50 meters of any of the four borders (50 is chosen
because σ = 50). The results are shown in Figure 9. It is
clear that nodes deployed near the boundary will make the
estimation error larger.
Computation Expense
0.02ms
0.05ms
0.14ms
0.26ms
0.32ms
0.68ms
The relative comparison among these algorithms is more
important than their absolute values. We can find that the
computational cost of the gradient descent is 34 times more
expensive than the geometric method. Given the fact that the
geometric method is very simple (its cost is almost negligible),
and the location discovery is only conducted once, the gradient
descent method is also affordable for sensor networks. Also
as we mentioned before, implementing the optimization technologies such as table-lookup in the sensor system will make
it more realistic to use the gradient descent algorithm.
2) Estimation Accuracy: From Figure 10, we see that the
gradient descent approach supplies the best results and the
geometric approach produces the worst results. The smallarea-seach scheme becomes more and more accurate when the
number of steps increases. The figure shows that the accuracy
of the 2-step method is already close to the gradient decent
method.
D. Comparison of Three Find-Maximum Methods
As we have discussed in Section IV-A, we propose to use
three different approaches to find the maximum point of the
likelihood function. Among these three approaches, gradient
descent can provide the best accuracy, but its computation
9
18
Estimation Error (meters)
B. Robustness and Security
Geometry Algorithm
Small Area Search Algorithm (2 steps)
Small Area Search Algorithm (4 steps)
Gradient Descent Algorithm
16
In the beacon-based schemes, the localization accuracy
largely depends on a small number of beacon nodes. When
some of these nodes fail to function or when they are tampered
with by adversaries (for example, some compromised beacon
nodes might report false positions), a significant number of
sensors can be affected, i.e., their derived locations can be
much far away from their actual locations.
In contrast, the beacon-less KPS scheme is much more robust and secure. In KPS, each sensor depends on its neighbors
to find its own location. When one or a few neighbors fail,
the localization results will not be affected much. When some
compromised neighbors intentionally send out false group
memberships, their lies cannot be arbitrary, because a lie that
deviates too much from the deployment knowledge can reveal
anomalies. Therefore, the KPS scheme can even tolerate node
compromise to certain degree. Further analysis regarding this
property is undergoing.
14
12
10
8
6
4
100
200
300
400
500
600
700
800
900
1000
m
Fig. 10.
Comparison of different numerical approach (R = 40).
VI. C OMPARISONS WITH EXISTING SCHEMES
In this section, we compare our KPS scheme with the
existing beacon-based location schemes. Because KPS and
its assumptions are significantly different from the existing
beacon-based schemes, comparing the localization accuracy
is not much meaningful. Therefore our comparisons mainly
focus on cost, robustness, security, and mobility.
C. Limitation of the KPS Scheme
Although KPS achieves localization without using expensive beacon nodes, it does have its limitations. First, Beaconbased schemes support mobile sensor networks. Namely nodes
can obtain their locations even if they are mobile. However,
KPS depends on the distribution of the node deployment;
once a node moves, the distribution cannot be maintained.
Therefore, KPS can only be used in a static sensor networks.
Second, locations of deployment points are critical. They must
be estimated with high accuracy. Although this can be easily
achieved for an airborne deployment because GPS can be used
on an airplane, the goal is hard to achieve for other types
of deployment. In addition, KPS also requires an accurate
modeling of deployment knowledge. In our future work, we
will study the accuracy of localization if the actual deployment
deviates from the model. Due to these limitations, we do
not claim that KPS can replace the existing beacon-based
localization schemes in all applications. Our KPS scheme
provides an less-expensive alternative in those applications
that satisfy our assumptions. We believe such assumptions are
reasonable in many sensor network applications.
A. Cost analysis
1) Communication Cost: Communication cost is a major
concern in sensor networks. For the beacon-based localization
schemes, communication cost is very low, because sensor
nodes only need to receive signals from the beacon nodes;
there is no interaction between sensor nodes. The KPS scheme
depends on the knowledge of neighbors, it requires each
node to broadcast (only one-hop broadcasting) a message
to its neighbors. However, this broadcasting is necessary for
neighbor discovering that is required by other functionalities
of sensor networks, such as routing. Therefore, the KPS
localization scheme does not introduce extra communication
cost.
2) Computation and Storage Cost: Compared with the
beacon-based location scheme, the calculation of KPS is
more complex, so the computation cost of KPS is much
higher than most of the beacon-based localization schemes.
Most computation burden comes from the Find-Maximum
methods. However, our simulation results have shown that the
computation cost is still realistic.
As we mentioned in IV-C, to reduce the computation cost,
we can store some pre-calculated table in sensor’s memory.
The size of the table can be limited to several kilobytes.
3) Device Cost: The cost of device on beacon-based
schemes is much higher than the KPS scheme. KPS is sensitive
to node density. If the node density of the sensor networks is
high enough, no extra device is needed; if the node density
is too low, cheap dummy nodes can be deployed to help
achieve acceptable localization accuracy. However, beaconbased schemes must depend on special beacon nodes, which
are much more expensive than normal sensor nodes.
D. Summaries
The comparisons of the KPS scheme and beacon-based
localization schemes are summarized in Table II
TABLE II
C OMPARISON OF KPS AND BEACON - BASED SCHEMES .
Communication overhead
Computation cost
Device cost
Robustness/Security
Mobility
10
KPS
Low
High
Low
High
None
beacon-based
Low
Low
High
Low
Good
VII. C ONCLUSION AND F UTURE W ORK
[14] A. Leon-Garcia. Probability and Random Processes for Electrical
Engineering. Reading, MA: Addison-Wesley Publishing Company, Inc.,
second edition, 1994.
[15] R. Nagpal, H. Shrobe, and J. Bachrach. Organizing a global coordinate
system from local information on an ad hoc sensor network. In IPSN’03,
2003.
[16] A. Nasipuri and K. Li. A directionality based location discovery
scheme for wireless sensor networks. In Proceedings of ACM WSNA’02,
September 2002.
[17] D. Niculescu and B. Nath. Ad hoc positioning system (APS) using AoA.
In Proceedings of IEEE INFOCOM 2003, pages 1734–1743, April 2003.
[18] D. Niculescu and B. Nath. Dv based positioning in ad hoc networks.
In Journal of Telecommunication Systems, 2003.
[19] N. B. Priyantha, A. Chakraborty, and H. Balakrishnan. The cricket
location-support system. In Proceedings of MOBICOM, Seattle, Washington’00, August 2000.
[20] A. Rao, S. Ratnasamy, C. Papadimitriou, S. Shenker, and I. Stoica.
Geographic routing without location information. In Proceedings of
ACM MOBICOM 2003, pages 96–108, September 2003.
[21] A. Savvides, C. Han, and M. Srivastava. Dynamic fine-grained localization in ad-hoc networks of sensors. In Proceedings of ACM MobiCom
’01, pages 166–179, July 2001.
[22] A. Savvides, H. Park, and M. Srivastava. The bits and flops of the n-hop
multilateration primitive for node localization problems. In Proceedings
of ACM WSNA ’02, September 2002.
[23] Y. Xu, J. Heidemann, and D. Estrin. Geography-informed energy
conservation for ad hoc routing. In Proceedings of ACM MobiCom
2000, Rome, Italy, July 2001.
In sensor networks, traditional localization schemes use beacons as the reference points to help sensors find their locations.
We present KPS, a beacon-less localization scheme, in which
sensors use the deployment distribution and the position of
deployment points to find the locations. The major advantage
of the KPS scheme is that we do not need the expensive beacon
nodes, while achieving comparable location discovery results.
We have conducted extensive evaluation. Our results show
that when the node density is high, the location estimation
error achieved by KPS can be less than a few meters. These
results show that the accuracy provided by KPS is sufficient to
support various applications in sensor networks. In our future
work, we plan to study how the inaccuracy of the deployment
knowledge can affect the accuracy of the location discovery.
Our motivation is that in practice, the deployment knowledge
that we know prior to the deployment might not be quite
accurate. It will be interesting to know how KPS is affected
by that. We also plan to provide more analytical evaluation
results on KPS.
VIII. ACKNOWLEDGMENT
The authors acknowledge supports from the United States
National Science Foundation IIS-0219560, IIS-0312366, and
CNS-0430252. The authors would also like to thank all the
anonymous reviewers for their valuable comments.
R EFERENCES
[1] P. Bahl and V. N. Padmanabhan. RADAR: An in-building RF-based user
location and tracking system. In Proceedings of the IEEE INFOCOM,
pages 775–784, March 2000.
[2] R. Barrett, M. Berry, T. F. Chan, J. Demmel, J. Donato, J. Dongarra,
V. Eijkhout, R. Pozo, C. Romine, and H. Van der Vorst. Templates for
the Solution of Linear Systems: Building Blocks for Iterative Methods,
2nd Edition. SIAM, Philadelphia, PA, 1994.
[3] N. Bulusu, J. Heidemann, and D. Estrin. GPS-less low cost outdoor
localization for very small devices. In IEEE Personal Communications
Magazine, pages 28–34, October 2000.
[4] N. Bulusu, J. Heidemann, and D. Estrin. Density adaptive algorithms
for beacon placement, April 2001.
[5] M. H. DeGroot and M. J. Schervish. Probability and Statistics. Addison
Wesley, 3rd edition, 2002. Chapter 6.
[6] L. Doherty, K. S. Pister, and L. E. Ghaoui. Convex optimization methods
for sensor node position estimation. In Proceedings of INFOCOM’01,
2001.
[7] R. Hamming. Numerical Methods for Scientists and Engineers. Dover
Pubns, 2nd edition, 1987.
[8] A. Harter, A. Hopper, P. Steggles, A. Ward, and P. Webster. The anatomy
of a context-aware application. In Proceedings of MOBICOM’99,
Seattle, Washington, 1999.
[9] T. He, C. Huang, B. M. Blum, J. A. Stankovic, and T. F. Abdelzaher.
Range-free localization schemes in large scale sensor networks. In
Proceedings of the Ninth Annual International Conference on Mobile
Computing and Networking (MobiCom ’03), 2003.
[10] B. Hofmann-Wellenhof, H. Lichtenegger, and J. Collins. Global Positioning System: Theory and Practice. Springer Verlag, 4th ed., 1997.
[11] X. Hong, K. Xu, and M. Gerla. Scalable routing protocols for mobile
ad hoc networks. IEEE Network magazine, (4), 2002.
[12] B. Karp and H. T. Kung. GPSR: Greedy perimeter stateless routing for
wireless networks. In Proceedings of ACM MobiCom 2000, 2000.
[13] Y. B. Ko and N.H. Vaidya. Location-aided routing (lar) in mobile ad
hoc networks. In Proceedings ACM/IEEE MOBICOM 98), pages 66–75,
October 1998.
11