Runs versus Lemons: Information Disclosure and Fiscal Capacity ∗ Miguel Faria-e-Castro
advertisement

Runs versus Lemons:
Information Disclosure and Fiscal Capacity∗
Miguel Faria-e-Castro
Joseba Martinez
Thomas Philippon
NYU
NYU
NYU Stern, NBER and CEPR
March 2015
Preliminary and Incomplete.
Abstract
We study financial crises where governments are forced to choose between runs and lemons. Revealing information about bank asset quality can improve welfare by reducing adverse selection in credit markets, but it can
also create runs on weak banks. A fiscal backstop mitigates these risks and allows the government to pursue
riskier strategies that involve high disclosure. Our theory sheds light on optimal interventions and provides an
explanation for the different choices that governments make during financial crises.
JEL: E5, E6, G1, G2.
∗ We thank Willie Fuchs, Guido Lorenzoni, Harald Uhlig and Wei Xiong (discussants), as well as participants in seminars at MIT,
NYU, NYU Stern, NBER Summer Institute, the Wharton Conference on Liquidity and Financial Crises and the AEA Annual Meeting
2015.
1
Governments play an important role in stopping or mitigating financial crises (Gorton, 2012). The types of
policies used by governments during crises can broadly be categorized into two classes. The first class involves
guarantees, capital injections, and other policies that share the common feature that they are backed by the
fiscal capacity of the government. A second class of policies includes stress tests, asset quality reviews, regulatory
assessments and other interventions that do not impinge on the balance sheet of the government but rather on its
ability to credibly disclose information. Historically, governments almost always use both types of interventions;
yet, the existing literature has only studied one or the other. Our goal is to provide a theory of optimal interventions
using both fiscal and information disclosure policies.
Beyond this normative motivation, there is also a positive one: governments with ample fiscal capacity seem
to choose different disclosure strategies than governments with limited capacity. For instance, in May 2009, the
Federal Reserve publicly reported the results of the Supervisory Capital Assessment Program (SCAP). The SCAP
was an assessment of the capital adequacy, under adverse scenarios, of a large subset of US financial firms. The
exercise is broadly perceived as having reduced uncertainty about the health of US banks and helped restore calm
to financial markets. The Committee of European Banking Supervisors (CEBS) also conducted EU-wide stress
tests from May to October 2009 but chose a very different approach to information disclosure. It first announced
that it would not disclose the results. The exercise was repeated a year later and the results were published, but
the scope of the test was limited, especially with regard to sovereign exposures. European stress tests were less
effective than their US counterparts in restoring confidence to financial markets. Our theory suggests that the lack
of a common fiscal backstop made it difficult for Europe to conduct the same rigorous stress tests as the U.S.1
##
The government can improve welfare because it can disclose information that individual banks cannot credibly
disclose. Disclosure alleviates adverse selection in the credit market but can trigger runs on weaker banks.
This will stop the liquidation of the bank’s assets, and allow the bank to survive and invest. But if the bank
turns out to be bad, the government will have to raise taxes to fulfill its guarantee. Deposit guarantee therefore
involves a tradeoff between
##
Disclosure
Disclosure is typically motivated by the need to restore investor confidence in the health of financial
firms. We capture this idea using a simple model of adverse selection, following Akerlof (1970), Stiglitz and Weiss
(1981) and Myers and Majluf (1984). Our economy is populated by financial intermediaries (“banks”) that differ
in the quality of their existing assets. Banks privately observe the quality of their legacy assets and must raise
external funds in credit markets to invest in new projects, but the riskiness of new loans depends on the quality of
legacy assets. This information asymmetry creates the potential for adverse selection. When average asset quality
1 Ong and Pazarbasioglu (2014) provide a thorough overview of the details and perceived success of SCAP and the CEBS stress tests.
See Véron (2012) for a discussion of the challenges facing European policy makers.
2
is high, adverse selection is limited and credit markets operate efficiently. When average asset quality deteriorates,
however, credit markets can freeze. The key aggregate state variable in our economy is the fraction of banks with
good legacy assets. If the fraction of bad banks is likely to be low, markets are likely to freeze, and the government
can improve welfare by disclosing information about asset quality.2
For these reasons, alleviating adverse selection pushes the government to disclose information about banks’
balance sheets. Why, then, not disclose as much as possible? We argue that an important cost of disclosure is the
risk of triggering a run on weak banks. We follow the standard approach of Diamond and Dybvig (1983) in modeling
banks as being funded with runnable liabilities.3 If short term creditors (depositors) learn that a particular bank
is weak, they might decide to run. Runs are inefficient for two reasons: there is a deadweight loss from liquidating
assets, and liquidated banks cannot invest in new projects (with positive NPV).
In our model, disclosure therefore involves a tradeoff between runs and lemons. We first consider the case of
pure disclosure without any fiscal intervention. We solve for optimal disclosure in the spirit of Bayesian persuasion,
as in Kamenica and Gentzkow (2011). The government chooses how much to disclose without knowing the actual
fraction of good banks in the economy, over which the government and the private sector share some prior belief.
Disclosure reveals both the aggregate state and information about individual banks. We argue that this captures the
essence of stress tests and asset quality reviews. We find conditions under which the planner’s disclosure problem
is either convex or non-convex and, consequently, optimal disclosure might take either intermediate, very low, or
very high values. A key determinant of the amount of disclosure is the distribution of beliefs about the aggegate
state of the economy.
Credit Guarantees and Deposit Insurance
Fiscal interventions expose the balance sheet of the government
to financial risks. The government in our model provides deposit insurance to stop bank runs and credit guarantees
to unfreeze credit markets, which it must pay for with distortionary taxation. Deposit insurance is straightforward:
it avoids inefficient liquidation of the assets of banks that are susceptible to runs. Interventions in markets with
adverse selection, on the other hand, are potentially difficult to analyze because they require solving a mechanism
design problem with endogenous outside options, as explained in Philippon and Skreta (2012) and Tirole (2012).
We rely on the work developed in these papers to show that the optimal intervention takes a simple form: the
government provides a credit-enhancing guarantee to banks that need to borrow. Guarantees of this kind are
indeed routinely observed during financial crises, and were used in the U.S. and in Europe in 2009. Deposit
insurance and debt guarantees draw on the same fiscal resources, so they create a tradeoff for the planner. We find
that deposit insurance plays a prominent role because if a bank is run on, it loses its option to invest. In that sense,
a government needs to worry about credit markets only after it has stopped large scale bank runs.
2 In this sort of environment, the impact of disclosure on efficiency is not obvious. Certain disclosure policies can have a negative
impact on welfare. However, it is always possible to find some disclosure that helps, and full disclosure is trivially optimal (if feasible)
since it restores symmetric information.
3 We have in mind all short term runnable liabilities: MMF, repo, ABCP, and, of course, large uninsured deposits. In the model, for
simplicity, we always refer to intermediaries as banks and to liabilities as deposits.
3
The main contribution of our paper is to analyze the interaction between fiscal capacity and disclosure. Our two
main insights can be summarized as follows. First, disclosure is (often) a high risk/high return strategy. Imposing
meaningful transparency about balance sheets can effectively restore confidence and unfreeze credit markets. In
many states of the world, when average asset quality is not too low, this essentially comes for free. But there are
risks: if a government implements a very informative stress test and it turns out that banks are in worse shape
than expected, the government could face a large bank run. The second key insight is that fiscal capacity provides
insurance against the risks created by information disclosure. When fiscal capacity is ample, the planner reveals
information and, in case of bad outcomes, provides guarantees to banks that are vulnerable to runs. When capacity
is low, the planner prefers to avoid runs by not disclosing much information.
It is important to emphasize that none of these results could be obtained without the joint modeling effort in
this paper. In the model, as in the real world, it is important that the same aggregate fundamental (the fraction
of bad banks) determines both the risk of runs and the risk of a market freeze. It is also important to solve for
the jointly optimal policy. Otherwise, one might think that disclosure and guarantees can be substitutes with
respect to adverse selection. A government with strong fiscal capacity could guarantee bank debt and unfreeze
markets without disclosing information. This is certainly true, but it is often not optimal, and it also misses the key
prediction. The prediction is not that fiscal capacity always implies full disclosure. The key prediction, akin to a
single crossing property, is that the optimal degree of disclosure increases with the fiscal capacity of the government.
This prediction can only be understood in the context of an explicit model, such as the one we propose.
Our paper is organized as follows. Section 1 presents the model, and the decentralized equilibrium with no
intervention. Section 2 focuses on the role of information disclosure by a benevolent planner. Section 3 discusses
fiscal interventions. Section 4 combines information disclosure and fiscal interventions, and studies the optimal
combination of the two types of policies. Section 5 concludes.
Related literature
We make two contributions relative to the existing literature. First, we model new lending and borrowing by banks
in addition to bank runs. While existing papers capture some important aspects of information disclosure, they
do not address what seems to be the main tradeoff facing policy makers, between unfreezing credit markets and
triggering bank runs.
Our second, and most important, contribution is to analyze the role of fiscal capacity in shaping information
disclosure. Our model captures the idea that fiscal capacity is like an insurance policy that allows regulators to
be more aggressive in their disclosure choices. Our model therefore provides an explanation for the difference in
disclosure choices between Europe and the United States. Banking regulators in the U.S. have a fiscal backstop
and are hence more willing to run tougher stress tests. Banking regulators in Europe do not have a common
fiscal backstop (or at least, did not have one during the financial crisis), and so are less willing to expose potential
4
weaknesses in their banking system.
Our work builds on the rich literature that studies asymmetric information, following Akerlof (1970), Spence
(1974), and Stiglitz and Weiss (1981). If no information is revealed by the planner, our economy resembles the
one studied by Philippon and Skreta (2012) and Tirole (2012). The optimal policy to mitigate adverse selection
is similar to theirs. Since we add bank runs to an economy with asymmetric information, we also build on the
large literature started by Diamond and Dybvig (1983). Several recent papers shed light on how runs take place
in modern financial systems: theoretical contributions include Uhlig (2010) and He and Xiong (2012); Gorton and
Metrick (2012) provide a detailed institutional and empirical characterization of modern runs.
Several recent papers study specifically the trade-offs involved in revealing information about banks. Goldstein
and Leitner (2013) focus on the Hirshleifer (1971) effect: revealing too much information destroys risk-sharing
opportunities between risk neutral investors and (effectively) risk averse bankers. These risk-sharing arrangements
also play an important role in Allen and Gale (2000). Shapiro and Skeie (2013) study reputation concerns by a
regulator in an environment characterized by a trade-off between moral hazard and runs.
Another set of papers study disclosure in models of bank runs. In this class of models, disclosure is a way to
break pooling equilibria. Whether disclosure is good or bad then depends on whether the pooling equilibrium is
desirable: if agents pool on the “no run” equilibrium then there is no reason to disclose information. This is more
likely to happen in good times as Carlsson and van Damme (1993) and Morris and Shin (2000) show. On the other
hand, in bad times, agents might run on all the banks, in which case it is better to disclose information to save at
least the good banks. This is the basic result of Bouvard et al. (ming), who also consider ex-ante disclosure rules
that allow pooling across macroeconomic states. Parlatore (2013) studies an economy with aggregate risk where
more precise information about realizations of the aggregate state can lead to more bank runs.
In our setting, banks are not able to credibly disclose information about their type. Alvarez and Barlevy (2014)
study a model of contagion in a banking network where moral hazard limits efficient investment. They show that
private disclosure choices are not always efficient and that mandatory disclosure can improve welfare. The focus of
the paper is different from ours. They only consider perfect or no disclosure, and they focus on contagion. Gorton
and Ordoñez (2014) consider a model where crises occur when investors have an incentive to learn about the true
value of otherwise opaque assets.
Our paper also relates to the theoretical literature on bank bailouts. Gorton and Huang (2004) argue that the
government can bail out banks in distress because it can provide liquidity more effectively than private investors.
Diamond and Rajan (2005) show that bank bailouts can backfire by increasing the demand for liquidity and
causing further insolvency. Diamond (2001) emphasizes that governments should only bail out the banks that have
specialized knowledge about their borrowers. Farhi and Tirole (2012) examine bailouts in a setting in which private
leverage choices exhibit strategic complementarities due to the monetary policy reaction. Corbett and Mitchell
(2000) discuss the importance of reputation in a setting where a bank’s decision to participate in a government
5
intervention is a signal about asset values, and Philippon and Skreta (2012) formally analyze optimal interventions
when outside options are endogenous and information-sensitive. Mitchell (2001) analyzes interventions when there
is both hidden action and hidden information. Landier and Ueda (2009) provide an overview of policy options for
bank restructuring. Philippon and Schnabl (2013) focus on debt overhang in the financial sector. Diamond and
Rajan (2012) study the interaction of debt overhang with trading and liquidity. In their model, the reluctance to
sell assets leads to a collapse in trading which increases the risks of a liquidity crisis.
Goldstein and Sapra (2014) review the literature on the disclosure of stress tests results. They explain that
stress tests differ from usual bank examinations in four ways: (i) traditional exams are backward looking, while
stress tests project future losses; (ii) the projections under adverse scenarios provide information about tail risks;
(iii) stress tests use common standards and assumptions, making the results more comparable across banks; (iv)
unlike traditional exams that are kept confidential, stress tests results are publicly disclosed. They list two benefits
of disclosure: (i) enhanced market discipline; and (ii) enhanced supervisory discipline. Our model is based on yet
another benefit: the unfreezing of the credit market. They list four costs of disclosure: (i) disclosure might prevent
risk-sharing through the Hirshleifer (1971) effect, which is the focus of Goldstein and Leitner (2013); (ii) improving
market discipline is not necessarily good for ex-ante incentives; (iii) disclosure might trigger runs; (iv) disclosure
might reduce the ability of regulators to learn from market prices, as in Bond et al. (2010). Our model is based on
cost (iii).
1
1.1
Description of the Model
Technology and Preferences
There are four periods, t = −1, 0, 1, 2, and one good (consumption) at every period. The economy is populated by a
continuum of households, a continuum of mass 1 of financial intermediaries (banks), and a government. Government
policies are studied in Sections 3 and 4. Figure 1 summarizes the timing of decisions and events in the model, which
are explained in detail below.
Figure 1: Model Timing
t = −1
t=0
t=1
◦ Nature draws θ
◦ Government sets p
◦ Credit market opens
◦ Nature draws types
◦ Signals si observed
◦ Bank learns its type
◦ Households may run
◦ Surviving banks receive
invest opportunites
t=2
◦ Legacy assets and
investments pay off
◦ Government levies
taxes
Note: θ is the fraction of bad banks, p is the precision of the disclosure policy, si is a signal about bank i’s quality.
6
Households are risk-neutral, receive an endowment ȳ1 in period 1, and care only about consumption in period
2. They have access to a storage technology to transfer resources from time 1 to time 2. This allows us to treat
total output at time 2 as the measure of welfare that the government seeks to maximize. Households have deposits
in the banks, they can lend in the credit market in period 1, and they are residual claimants of all banking profits
in period 2.
Banks are indexed by i ∈ [0, 1] and have pre-existing long-term assets (legacy assets) and redeemable liabilities
(deposits). The legacy assets of bank i generate income ai at time 2. Each bank may be of either good (g) or bad
(b) type. The assets of good banks yield higher revenues than the assets of bad banks (in a stochastic dominance
sense discussed later). Banks are financed by deposits. Each depositor is entitled to 1 unit of consumption in period
0 and D > 1 in period 2. Banks have access to a liquidation technology to meet potential redemptions. Bank i
receives (1 − δ) ai if it liquidates its assets at any time before time 2. The parameter δ > 0 captures the deadweight
loss from early liquidation.
Nature draws the distribution of bank types in period −1. Let G be the set of good banks, and B be the set
of bad banks. Nature draws the fraction of good banks θ from the distribution π (θ), and each bank then has the
same likelihood of being good. The random variable θ is therefore both the fraction of good banks in the economy
and the ex-ante probability that any given bank is good:
Pr (i ∈ G | θ) = θ.
Each bank privately observes its own type at time −1.
Households can withdraw their deposits at any time during period 0. Period 0 is also when the governement
announces its policies. Some of these policies involve the disclosure of information about banks’ types. In period 1,
each surviving (i.e., non liquidated) bank receives an investment opportunity that costs a fixed amount k at time
1 and deliver a random payoff v at time 2. We maintain the following assumption throughout the paper.
Assumption 1: Valuable Investments.
Investment projects have a positive net present value, and investment
by all banks is feasible: E[v] > k and ȳ1 > k.
Finally, at time 2, non-liquidated legacy assets return a, new investments return v, and the government levies
distortionary taxes. Raising Ψ creates a deadweight losse γΨ2 .
1.2
Welfare
Given our assumptions about preferences and technology we can characterize the first best allocation.
7
Lemma 1. The first best level of welfare in aggregate state θ is
w̄ (θ) = E [a | θ] + ȳ1 + E[v] − k
(1)
The first-best allocation has three simple features: (i) no asset is liquidated; (ii) all banks invest; and (iii) taxes
are zero. Departures from the first best allocation are driven by information assymmetries, coordination failures,
and government interventions. Runs might force some banks to liquidate their assets. We denote by L the set of
banks that are liquidated. Adverse selection might push some banks to drop out of the credit market. We denote
by O the set of banks that are not liquidated but do not invest. Finally, the government might choose to intervene
to stop bank runs or alleviate adverse selection. These interventions imply a fiscal burden Ψ. Ex-post welfare in
the economy is then
ˆ
w = w̄ − δ
L
ˆ
ai −
O∪L
(vi − k) − γΨ2
(2)
The sets L and O are complex equilibrium objects that depend (at least) on the realization of θ and the policies of
the government.
1.3
Policies
The government seeks to bring the economy as close as possible to the first best allocation. Let P denote the
(multi-dimensional) policy of the government. Given the welfare function in equation (2), this implies
" ˆ
P = arg min E δ
∗
P
ˆ
ai +
Lθ,P
Oθ,P ∪Lθ,P
#
(vi − k) +
γΨ2θ,P
The government wants to minimize liquidation costs, lost investment opportunities, and deadweight losses from
taxes. Our paper studies the kind of policies that the government should use to achieve these conflicting objectives.
We study two broad classes of policies. A first class of policies relies on the revelation of information about the
underlying distribution of banks types. We show that this involves a tradeoff between L and O, i.e., between runs
and lemons. An important point is that the government chooses its disclosure policy before knowing θ. This makes
disclosure risky.
A second class of policies relies on the power of government to raise taxes. The government may decide to
guarantee the deposits of a particular bank or to provide credit support to facilitate new investments. These
policies involve a tradeoff between L, O and Ψ. We impose the following restrictions on government interventions.
Assumption 2: Feasible Interventions. The government cannot repudiate private contracts and must respect
the participation constraints of all private agents.
Assumption 2 is critical for our analysis because it restricts the set of feasible policies. The government cannot
8
force households to keep their deposits in the banks, and it cannot force banks to issue claims they do not want to
issue. We maintain the usual definition of a free market economy where the only policy that is allowed to violate
participation constraints is taxation. We discuss later what this implies in terms of bank regulations, such as forcing
banks to raise equity.
1.4
Technical Assumptions
Our modelling choices for banking assets follow closely those in Philippon and Skreta (2012) and we make the same
technical assumptions as they make. Formally, we assume that only total income a+v is observable, that repayment
schedules are non-decreasing in total income, and that the distribution of a + v satisfies the strict monotone hazard
rate property with respect to bank types:
f (a + v | b)
f (a + v | g)
>
.
1 − F (a + v | b)
1 − F (a + v | g)
Repayment schedules must be increasing in total income a + v, and cannot depend on a and v separately. These
are standard assumptions in corporate finance that can be justified by the possibility of hidden trades.4 Our results
hold under these technical assumptions but the intuition of the model is more easily explained by using the following
special case. Let q, V, Ag , Ab be four strictly positive numbers such that q < 1 and Ab < Ag :
Assumption 3: Simplifying Assumptions. Legacy asset pay off Ag for good banks and Ab for bad banks. New
investments pay off v = V with probability q and 0 with probability 1 − q, such that
Ag −
k
> D > Ab > 0.
q
Assumption 3 satisfies the technical requirements listed above. The critical elements for adverse selection are
that banks know more than outsiders about the quality of their assets and that investment payoffs are random.
Here, for simplicity, banks know their assets’ payoffs in advance, and investment returns are binary. The inequalities
imply that good banks are safe while bad banks are effectively insolvent. The legacy assets of good banks are large
enough to cover all potential liabilities, including liabilities issued at time 1 to finance new investments, and even if
investors are pessimistic about the quality of the pool of borrowers, in which case (as we show below) they charge
an interest rate of 1/q.
4 The important point is the quality of legacy assets matters for new investment. Technically, there are several (essentially) equivalent
ways to derive this dependency. Here we follow the standard corporate We that only total income at period 2, y = a + v is contractible.
Tirole (2012) instead assumes that new projects are subject to moral hazard, so banks must pledge their existing assets as collateral.
One could also assume that bankers can repudiate their debts, engage in risk shifting, etc. All these frictions motivate the role of
existing assets as collateral for new loans and are equivalent in our framework. See Philippon and Skreta (2012) for a discussion of all
these issues.
9
2
Equilibrium without Government Intervention
Let us now characterize the equilibrium with exogenous information and without taxes.
2.1
Information
Investors observe public signals {si }i∈[0,1] about bank types at the begining of period 0. Each signal is binary and
satisfies Pr (s = 1 | G) = 1 and
Pr (s = 0 | B) = p
for some p ∈ (0, 1).5 A bad signal means that the bank is bad with certainty, whereas a bank receiving the good
signal may be good or bad. We denote by ns the mass of banks receiving signal s. By definition, we have
n0
= p (1 − θ) ,
n1
= θ + (1 − p) (1 − θ) .
Agents know p and observe n0 , therefore they also learn the aggregate state θ. Let zs denote the posterior belief
that a bank is good if it receives signal s:
zs ≡ Pr (i ∈ G | si = s) .
Bayesian consistency requires z0 = 0 and
z1 =
θ
.
θ + (1 − p) (1 − θ)
Note that the posterior probability depends on the precision p and on the realization of the aggregate state θ.
2.2
Bank runs
Let us now describe the run equilibria. Depositors can withdraw their deposits from banks at any time.6 The
liquidation technology yields 1 − δ per unit of asset liquidated and a bank that makes use of this technology looses
the oportunity to invest in period 1. If a bank liquidates a fraction λ of its assets, it can satisfy (1 − δ) λa early
5 A previous version of the model used symmetric signals with precision p ≡ Pr (s = 1 | i ∈ G) = Pr (s = 0 | i ∈ B). The current
i
i
setup is superior in three ways. It is more tractable. It is more realistic as a description of stress tests since identified problems (almost)
always exist, and the risk is really that regulators might miss some real problems. Formally, this means that there are type 2 errors but
(essentially) no type 1 errors. Finally, and more deeply, it is optimal to structure information disclosure in this way, as we discuss later
XX REFERENCE??
6 We do not explicitly model households with liquidity shocks that motivate the existence of deposit contracts in the first place, nor
do we address the question of whether a planner, assuming that it could, would choose to suspend convertibility. These issues have
been studied at length and the trade-offs are well understood (see Gorton (1985), for example). When liquidity demand is random,
suspending convertibility is socially costly. We assume that these costs are large enough that the government prefers to guarantee
deposits. Note also that our broad interpretation of deposits in the model includes short-term wholesale funding, whose suspension
would be difficult to implement in any case.
10
withdrawals and (1 − λ)a left at time 2. We assume that good banks are liquid even under a full run while bad
banks are not.
Assumption 4:
Good banks are liquid, while bad banks are not
Ab <
1
< Ag
1−δ
Now we need to characterize the set of equilibria. Suppose first that the bank that is known to be good.
Withdrawing early yields 1 while waiting yields the promised payment D. Since D > 1 the unique equilibrium is
no-run. On the other hand, if the bank is known to be bad, there always exist a run equilibrium. This is a direct
consequence of Assumption 4. Since (1 − δ) Ab < 1 the bank would have no assets left to pay its patient depositors
after a full run. Knowing this no depositor would wait if they anticipate a run.
The decision to run depends on the belief z about the quality of a bank. We have shown that no-run is the
only equilibrium when z = 1. Let z R be the posterior belief above which no run is the unique equilibrium. This
threshold is such that depositors are indifferent between running and waiting if all other depositors run. Therefore
z R + 1 − z R (1 − δ) Ab = z R D, and
(1 − δ) Ab
zR =
.
(3)
D + (1 − δ) Ab − 1
For beliefs in the set 0, z R multiple equilibria exist. For simplicity, we select the run equilibrium for any bank
whose posterior belief falls in the multiple equilibrium region. What matters for our results is that a run is possible
in that range, not that it is certain.7 We summarize our results in the following lemma.
Lemma 2. Depositors run on any bank whose perceived quality falls below z R .
Proof. See above.
The set of banks that are liquidated is therefore:
L (θ; p, ∅) = i ∈ [0, 1] | zi ≤ z R ,
where ∅ denotes the absence of government support.
2.3
Credit markets and investment in period 1
Banks receive valuable investment opportunities in period 1 but they must raise k externally. Under the assumptions
of Section 1, we have the following standard result in optimal contracting:
Lemma 3. Debt is an optimal contract to finance investment at period 1.
Proof. See Nachman and Noe (1994) and Philippon and Skreta (2012).
7 We have solved our model under two alternative and often used equilibrium selection devices: dispersed information and sunspots.
Our results are robust to using these alternative refinements.
11
If a bank borrows at rate r and invests, the payoffs of depositors, new lenders, and equity holders are
yD
=
min(a + v, D)
yl
=
min(a + v − D, rk)
ye
=
a + v − yl − yD
These payoffs reflect the fact that deposits are senior, and equity holders are residual claimants. Adverse selection
arises from the fact that banks know the payoffs of their legacy assets while lenders do not. Good banks know
that they always pay back their debts (Assumption 1) so they find it profitable to borrow at rate r only when
Ag − D + qV − rk ≥ Ag − D. Good bank therefore invest if and only if the market rate is below rg where
rg ≡
qV
.
k
(4)
We are interested in situations where information asymmetry can induce adverse selection in the credit market.
This happens when the interest rate for bad banks, q −1 , exceeds the maximum interest rate at which good types
q
are willing to invest: q −1 > rg , which is equivalent to imposing q ≤ Vk .
Equity holders of bad banks earn nothing if they do not invest since their existing assets are insufficient to repay
their depositors. As a result, bad banks always prefer to invest. Even in the absence of asymmetric information,
however, underinvestment by bad banks could occur due to debt overhang, as in Philippon and Schnabl (2013). Debt
overhang is not the focus of our analysis, so we asume that q ≥
k
,
V +Ab −D
which guarantees that Ab − D + V − kq ≥ 0.
To summarize, we consider the following parametric restrictions
Assumption 5.
There is potential for adverse selection in the credit market
k
<q<
V − (D − Ab )
r
k
V
Adverse selection models can have multiple equilibria. For instance, if lenders expect only bad banks to invest,
they set r = q −1 and indeed, at that rate, good banks do not participate. This multiplicity disappears when
governments can intervene, however, because (as we show below) the government can costlessly implement the best
pooling equilibrium by setting the interest rate appropriately. Without loss of generality, we therefore select the
best pooling equilibrium.
The equilibrium rate must satisfy the break-even condition of lenders. Consider a pooling equilibrium and where
lenders have a belief z about the type of a bank. Given the the risk free rate is one, the break-even condition is
k = zrk + (1 − z) qrk
12
Figure 2: Credit Market Equilibrium
Equilibrium Rate
1
q
Rate r
Rate r
1
q
Limit Rate For
Good Types
qV
k
Limit Rate For
Good Types
qV
k
Pooling Rate
1
0
1
1
zI
Perceived Quality z
0
zI
Perceived Quality z
1
This figures illustrate the equilibrium in credit markets by plotting the break-even rate for lenders r on the vertical axis against perceived
quality of the bank z in the horizontal axis. Due to good banks selecting out of participating in credit markets, the pooling rate on the
left panel is not an equilibrium for z < z I . The right panel illustrates equilibrium with adverse selection: below z I , the equilibrium
interest rate is q −1 and only bad banks participate in credit markets.
The lenders know that there is a probability 1 − z to lend to a bad bank that only repays with probability q. The
pooling rate is therefore
r (z) =
1
.
z + (1 − z) q
Figure 2 describes the equilibrium conditions.
Finally, we need to check the consistency of the pooling equilibirum by requiring that r (z) < rg . This defines a
threshold z I such that the pooling equilibrium is sustainable if and only if z > z I :
zI ≡
k
qV
−q
1−q
.
(5)
When z < z I , only the bad types invest, and the interest rate is r = 1q .8 We summarize the credit market equilibrium
in the following lemma.
Lemma 4. The credit market in period 1 is characterized by a cutoff z I on the perceived quality of any pool of
banks. When z > z I , both good and bad types invest, and the interest rate is r (z) =
1
z+(1−z)q .
When z < z I , only
bad types invest, and the interest rate is rb = q −1 .
Proof. See above.
The set of banks that opt out of credit markets is therefore
O (θ; p, ∅) = i ∈ G | z R ≤ zi < z I .
8 We assume here that depositors do not observe new borrowing decisions by banks. As a result, bad types can invest without creating
a run. We have solved the model under this alternative assumption.
13
Before characterizing the equilibrium of our economy with runs and adverse selection, we introduce an assumption
on the ordering of z R and z I . The case z R ≥ z I is not interesting since liquidated banks cannot invest. We therefore
make the following natural assumption:
Assumption 6: The threshold for bank runs is strictly smaller than the threshold for full investment: z R < z I ,
which requires
k
(1 − δ) Ab
qV − q
<
.
D + (1 − δ) Ab − 1
1−q
2.4
Equilibrium
The following proposition summarizes the equilibrium of our economy with runs and adverse selection, absent any
government intervention.
Proposition 5. Equilibrium in the economy with runs and adverse selection is characterized by the set L of banks
that are liquidated and the set O of banks that opt out of credit markets
L (θ; p, ∅) = i ∈ [0, 1] | zi ≤ z R ,
O (θ; p, ∅) = i ∈ G | z R ≤ zi < z I ,
where z R and z I are given by (3) and (5). Equilibrium welfare is:
ˆ
w (θ; p, ∅) = w̄ (θ) − δ
L
ˆ
a−
O∪L
(qV − k)
(6)
Proof. Follows from Lemmas 2 and 4.
Welfare depends on θ not only via average assets quality, as in the first best, but also, and more importanly, via
liquidation and lost investment opportunities.
Notice that issuing equity is not an equilibrium outcome at any stage of the model. Lemma 2 says that financing
investment by issuing equity is suboptimal. This is even more true at time 0 since in addition to the usual negative
signalling costs of equity, there is the possibility that a bad signal might trigger a run. The same arguments that
rule out equity issuance also rule out voluntary mergers of good and bad banks. In our model, the value of bad
banks’ assets is less than their deposits and there is no way for them to raise equity.
Raising equity under symmetric information (at time -1) can of course improve welfare but this is not an option
once banks know their types.
##
NEW. This may not be true if good banks anticipate a run. What can they do?
14
H1. Raise junior debt and keep cash liquid. The cash needed to kill the run equilibrium is the one that makes
even bad banks liquid
m=
1
− Ab
1−δ
To raise m they need to promise Rm such that
m = zRm + (1 − z) max 0, A + m − D = zRm + (1 − z) max 0,
b
If bad
1
1−δ
1
−D
1−δ
< D then R = 1/z. Bad banks are willing to do it if and only if (1 − δ) Ag − D < Ag − D − Rm
(assuming Rm + D < Ag ) or
zδAg >
1
− Ab
1−δ
In that case there is pooling on junior debt issuance.
H2. A better way (perhaps) could be to raise deposit rates. The condition is then
z + (1 − z) (1 − δ) Ab = zD0
or
D0 = 1 +
1−z
(1 − δ) Ab
z
A good bank would do it iff
(1 − δ) Ag − D < Ag − D0
or
1+
1−z
(1 − δ) Ab − D < δAg
z
or
zδAg > z + (1 − z) (1 − δ) Ab − zD
H2 dominate H1 iff
1
− Ab > (1 − z) (1 − δ) Ab − z (D − 1)
1−δ
MY INTUITION IS THAT H2 IS ALWAYS BETTER THAN H1. CHECK THIS.
##
Finally, a regulator might have the power to force all banks to raise equity at time 0. This would clearly violate
the participation constraint of good banks but it might improve welfare. It is important to understand, however,
that this is equivalent to a forced redistribution of resources from strong banks to weak banks. In fact, rather than
forcing all banks to raise equity, the government could guarantee deposits and cover its losses by taxing good banks’
15
profits ex-post. This would be a more efficient way to do it. It could also force good banks to buy the deposits of
good banks. Once we allow the government to force agents to do things against their interests there is no end to
what it can do. Our assumption is not that the government cannot do any of this, but in our model, redistribution
must happen via taxes and taxes are distortionary.
3
Endogenous Disclosure
We now endogenize information disclosure by letting the government choose the precision of the signals. The
government announces its choice of p at the beginning of period 0 without knowing the share of good banks θ. All
agents share a common prior belief about the distribution of θ, with probability density π (θ).
We assume throughout that banks themselves are not able to credibly disclose any information about the
quality of their assets, or rather that they have already disclosed all they can and our model is about the residual
uncertainty. Our model simply assumes that bank insiders know more than outsiders about the quality of their
legacy assets, which is almost tautological. What is less obvious, however, is why and how the government can do
better. There are two deep reasons. The first reason is that the government does not have the same conflict of
interest as individual banks. Imagine that there are two banks and that investors know that one is bad but do not
know which one. Any one bank would always claim it is the good one, but the government does not care which one
it is. Absent the risk of a run, it is clear that the government would reveal the identity of the bad bank. Another
advantage of the government is that it can mandate costly stress tests and asset quality reviews, and that it can
impose the same assumptions on all the banks. As a result, it can more easily compare the results across banks
than private investors.9 For these two reasons, we assume that the government can disclose information that the
private sector cannot credibly disclose.
After the realization of the aggregate state and the signal for each bank, agents form posterior probabilities of
each bank being good as explained earlier. Since z R > 0, banks that receive the bad signal always suffer runs.
Banks that receive the good signal may or may not suffer runs depending on how z1 compares to z R . The case
z1 < z R is not very interesting since it implies an unconditional run. To sharpen our analysis, we use the following
refinement.
Refinement:
A (small but measurable) set of agents observe the aggregate state θ in period −1.
With this refinement, if the aggregate state is such that θ < z R then an aggregate run occurs immediately. The
informed agents run in period −1. In period 0 all other depositors observe the run, and run as well. A run on the
entire system obviously renders stress tests and AQRs useless. In such a scenario the government would simply
try to save a few banks by issuing guarantees, as discussed later. But this is not a very interesting scenario (even
9 Indeed, the costs of complying with the post-crisis reporting environment are significant. For example, Success in Fed stress tests
comes with a cost (http://www.risk.net/risk-magazine/feature/2357474/success-in-fed-stress-tests-comes-with-a-cost).
16
Figure 3: Equilibrium Regions
1
zR
0.9
zI
0.8
0.7
Runs
0.6
0.5
Inefficient
Investment
All
Invest
0.4
0.3
0.2
0.1
0
0
0.2
0.4
z
0.6
0.8
1
This figure illustrates the equilibrium thresholds: for posteriors below z R , banks suffer runs. For posteriors between z R and z I , the
economy faces suboptimal investment, as only bad banks invest. For posteriors above z I , all banks with the good signal invest without
facing adverse selection in credit markets.
Cyprus did not experience such an unconditional run) and the refinement allows us to separate this extreme case
from the more intersting ones.
Conditional on no immediate run, then, everyone knows that θ > z R and since z1 > θ there is no run when
banks receive good signals. We can then think of π (θ) as the distribution of θ conditional on no aggregate run being
observed.10 At the other extreme, the case θ > z I does not change our analysis at all but forces us to introduce
additional notations so we ignore it.
Assumption 7.
Without loss of generality, the support of the probability density function π (θ) is [θ, θ] = [z R , z I ].
With this additional assumption, the equilibrium with stress testing is characterized by the number of banks in
each category n0 and n1 and the comparison of z1 (θ, p) and z I . For banks with good signals there are two possible
outcomes, depending on the values of θ and p.
1. Banks with the good signal face adverse selection, z R ≤ z1 (θ, p) < z I ;
2. All banks with the good signal invest, z I ≤ z1 (θ, p).
The equilibrium regions are depicted in Figure 3: banks with posterior belief lower than z R suffer a run; banks with
posterior belief in the z R , z I interval are not run on, but credit markets for these banks are affected by adverse
selection; finally, all banks with belief greater than z I invest, since credit markets for these banks are free from
adverse selection.
For a given p, the outcome depends on the realization of θ. Figures 4 and 5 illustrate two possible outcomes
depending on the realization of θ: if the realization is low, not only the mass of banks with the bad signal is high,
10 Formally, let the primitive distribution of θ be denoted by π (θ). Our analysis focuses on the conditional distribution that arises
0
conditional on θ ≥ z R , which we call π for simplicity.
17
Figure 4: Low θ
1
0.9
zR
0.8
θ=0.3
p=0.8
zI
0.7
0.6
z0
z1
0.5
0.4
0.3
0.2
0.1
0
0
0.2
0.4
0.6
z
0.8
1
This figure illustrates the posterior beliefs zs (θ, p)and mass of banks ns (θ, p) for s = {0, 1} at each posterior. The realization of θ is
low and p = 0.8. Credit markets for banks that received the good signal feature adverse selection (leading to suboptimal investment).
Figure 5: High θ
1
zR
0.9
θ=0.7
p=0.8
0.8
zI
z1
0.7
0.6
0.5
0.4
0.3
z0
0.2
0.1
0
0
0.2
0.4
z
0.6
0.8
1
This figure illustrates the posterior beliefs zs (θ, p)and mass of banks ns (θ, p) for s = {0, 1} at each posterior. The realization of θ is
high and p = 0.8. All banks that receive the good signal invest, since z1 > z I .
but the posterior beliefs for banks with the good signal is low. If the realization is high the posterior will be higher
and more mass will be placed on the good signal posterior.
We can characterize the equilibrium outcome for banks that receive the good signal for any pair (θ, p) using a
threshold on θ: the minimum (aggregate) state for which all banks that receive the good signal invest
θI (p) = min θ | z (θ, p) ≥ z I
(7)
The power of the stress test p determines this threshold, against which the realization of θ is compared to determine
the equilibrium outcome. This threshold, and the possible equilibrium regions, are depicted in Figure 6 for θ ∈
R I
z , z and p ∈ [0, 1].
18
Figure 6: Equilibrium Regions
zI
0.7
All
Invest
θ I (p)
0.65
0.6
θ
0.55
0.5
0.45
Inefficient
Investment
0.4
0.35
0.3
z R0
0.2
0.4
p
0.6
0.8
1
This figure illustrates the equilibrium regions in (p, θ) space. The line is the investment threshold, θI (p).
For the economy with stress testing, welfare is as given by (6), with the masses in each set being given by
L (θ, p) =p (1 − θ)
O (θ, p) =1 z (θ, p) < z I θ
this results in the following expression for welfare in the decentralized equilibrium, given (θ, p)
w (θ, p) = w∗ (θ) − p (1 − θ) δAb + qV − k − 1 z (θ, p) < z I θ (qV − k)
(8)
The first term is first-best welfare; the second term corresponds to liquidation and foregone investment losses by
banks that suffer runs, and the final term is foregone investment due to adverse selection. Note that the last term
is only positive when z (θ, p) < z I , or θ < θI (p). Taking expectations of equation over θ, expected welfare can be
written as
ˆ
∗
b
Eθ [w (θ, p)] = Eθ [w (θ)] − pE [1 − θ] δA + qV − k −
where Π (θ) =
´θ
θ
max[θ I (p),z R ]
zR
θdΠ (θ) (qV − k)
(9)
π (x) dx is the cumulative distribution function of θ. The welfare function consists of expected
first-best welfare, minus welfare losses that arise from asset liquidation by banks that suffer runs, minus foregone
investment opportunities both by banks that suffer liquidation and banks that opt out of investment due to adverse
selection.
19
The government’s disclosure problem, before the aggregate state θ is realized, can be formulated as
max Eθ [w (θ, p)]
p∈[0,1]
(10)
where Eθ [w (θ, p)] is the expected welfare function defined in (9). The tradeoff faced by the government in choosing
the informativeness of disclosure is that, by increasing the precision of the signal, it raises (in expectation) the
perceived quality z1 of banks that receive the good signal, thereby increasing expected investment by good banks.
This comes at the cost of revealing some banks to be bad and therefore causing runs (recall that banks that receive
the bad signal are run with certainty).
To further develop intuition about the costs and benefits of disclosure, Propositions 6 and 7 provide results on
optimal disclosure in the absence of runs and lemons, respectively.
Lemma 6. If there are no runs, welfare is weakly increasing in p (strictly increasing for p : θI (p) > z R ), and full
disclosure is optimal.
Proof. See Appendix B.
In the absence of runs, welfare is strictly increasing in p for low levels of disclosure: disclosing information
increases the average quality of banks with the good signal, decreasing the probability that credit markets will be
affected by adverse selection.11 Beyond a certain level of p, which we denote pm , the average quality of the banks
with the good signal will be so high that they invest with certainty in every state of the world. Increasing p yields
no further benefits, so in the absence of runs the planner is indifferent between disclosure choices in [pm , 1].
pm : θI (pm ) = z R ⇒ pm =
zI − zR
∈ (0, 1)
z I (1 − z R )
Lemma 7. If there is no adverse selection, welfare is strictly decreasing in p and no disclosure is optimal.
Proof. See Appendix B.
Absent adverse selection, the only effect of disclosure is that banks that are revealed to be bad suffer runs. Figure
7 represents the trade-off graphically: it plots the expected mass of banks that are affected by adverse selection,
and the expected mass of banks that are expected to suffer a run, as a function of p. The mass of banks that are
expected to suffer a run is strictly increasing in p, as p = 1 corresponds to the extreme case in which the signal
is perfect and no bad bank receives the good signal. The mass of banks that are expected to suffer from adverse
selection is decreasing until pm , after which disclosure is already high enough that the pool of banks with the good
signal invests efficiently even for low realizations of θ.
11 This is not a general property of information disclosure in an adverse selection setting. For example, if the asymmetric information
pooling equilibrium is such that investment is efficient, disclosing the identity of good banks weakly decreases welfare, since it reduces
the likelihood that the pooling equilibrium will induce efficient investment. A previous version of our model considered this possibility.
Our chosen form of disclosure technology is both more realistic and tractable analytically.
20
Figure 7: Expected mass at L and O, θ ∼ U z R , z I
0.5
0.45
0.4
0.35
pm
0.3
Banks in L
Banks in O
0.25
0.2
0.15
0.1
0.05
0
0
0.2
0.4
p
0.6
0.8
1
This figure plots the expected mass of banks in the set O (banks that opt out of credit markets due to adverse selection) and the set L
(banks which are run and liquidate assets) as a function of p, assuming a uniform distribution for the aggregate state π (θ) = U z R , z I .
We proceed to characterize the problem with runs and lemons. We first establish that there exists an interior
upper bound on the amount of disclosure that the planner chooses.
Lemma 8. In the economy with runs and lemons, the planner never sets p > pm .
Proof. See Appendix B.
This result follows immediately from the previous lemmas: increasing disclosure over pm offers no benefits from
unfreezing markets, while still causing bad banks to suffer runs, so the planner will never optimally choose a level
of disclosure beyond pm . We now characterize the solution to the disclosure problem in terms of the properties
of the distribution for the aggregate state. Proposition 9 describes the government’s optimal disclosure policy for
different characteristics of the distribution π (θ).
Proposition 9. Let
χ (θ) ≡ θ
If χ (θ) ≥
3z I −1
, ∀θ
1−z I
π 0 (θ)
π (θ)
∈ z R , z I , welfare is a strictly concave function in [0, pm ], and the optimal level of disclosure
solves the first-order condition
dθI (p)
π θI (p) θI (p) (qV − k) −
− E [1 − θ] δAb + qV − k = 0
dp
If χ (θ) ≤
3z R −1
, ∀θ
1−z R
∈ z R , z I , welfare is a strictly convex function in [0, pm ]. The optimal level of disclosure is
21
p = 0 if and only if
pm ≥
E [θ]
h
E [1 − θ]
1
δAb
qV −k
+1
(11)
i
and is p = pm otherwise.
Proof. See Appendix B.
The intuition for the above results is as follows: one can see χ (θ) as a measure of the slope of the density
function for the aggregate state at θ. A distribution with a high χ (θ) will tend to have an increasing probability
density function, and a high average; and so the aggregate state is, on average, high. When the distribution of θ
has a lot of mass to the right, choosing a small amount of disclosure entails a lower cost of runs (since there will
be fewer bad banks on average), while ensuring full investment by the (large) mass of good banks in almost every
state of the world. The planner has an incentive to choose an interior solution, since the benefits are large and the
costs are small. On the other hand, when χ (θ) is low, the distribution will tend to have a lot of mass to the left.
In this case, the trade-off between costs and benefits of disclosure is less favorable: given a low prior θ, the planner
needs to disclose a larger number of bad banks to push the posterior above z I . This entails causing runs on a larger
number of bad banks, and so the costs are higher. Furthermore, there is a small number of good banks, and so the
benefits of unfreezing the markets for these are also smaller. The Proposition shows that, in this case, the welfare
function is convex and the planner chooses either no disclosure at all, p = 0, or the upper bound pm . As condition
11 illustrates, the choice depends on how large pm is relative to parameters of the model. If pm is very large, then
disclosure involves causing runs on a large amount of banks, and so no disclosure is optimal.
To illustrate these claims, Figure 9 plots the expected welfare function for different distributions of the aggregate
state (normalized by first-best welfare for each distribution). We focus on distributions of the form π (θ) = βθχ for
χ ∈ R, where β is an appropriate normalizing constant, β =
χ+1
.
(z I )χ+1 −(z R )χ+1
Note that for this class of distributions
χ (θ) = χ is a constant. Given our baseline calibration (see A), χ = −1.5 is chosen to generate a convex welfare
function, and χ = 7 generates a concave welfare function. χ = 0 is the uniform distribution on z R , z I , and does
not satisfy either of the sufficiency conditions.12 In this case, we can use the following corollary to 9 to show that
the welfare function is first convex, and then concave in the [0, pm ] interval.
Corollary 10. Assume that π (θ) = βθχ (where β is an appropriate normalizing constant that depends on χ).
I
−1
Then: (i) Expected welfare is strictly concave for χ ≥ 3z
, (ii) Expected welfare is strictly convex for χ ≤
1−z I
h
i
R
3z R −1
−1 3z I −1
; (iii) For χ ∈ 3z
, 1−zI , welfare is convex in p ∈ 0, 12 3 − 1/z I − χ(1/z I − 1 and concave in p ∈
1−z R
1−z R
1
m
I
I
.
2 3 − 1/z − χ(1/z − 1 , p
Proof. See Appendix B.
12 In
our baseline calibration, z R = 0.25 and z I = 0.75. The thresholds are −1/3 and 5 for convexity and concavity, respectively.
22
Figure 8: Densities,π (θ) = βθχ
−3
6
x 10
χ=−1.5
χ=0
χ=7
5
π(θ)
4
3
2
1
0
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
θ
This figure plots the shape of different pdf ’s of the type
βθχ ,
for different values of χ.
The densities are shown in Figure 8. To focus on the shape of the welfare function, we plot welfare minus its
average value over p.
For χ = −1.5, welfare is convex for p ≤ pm ; moreover, it is nonmonotonic, first decreasing and then increasing.
Given our calibration, no disclosure is the optimum. For χ = 0, no disclosure is also the optimal solution, but
welfare is no longer strictly convex, becoming concave after a certain point. Finally, for χ = 7, welfare is strictly
concave and the optimal level of disclosure is interior.
4
Fiscal Interventions
##
##
In this section we analyze the fiscal interventions that the government can use to mitigate adverse selection
and bank runs, abstracting for now from information disclosure. We model the government’s fiscal constraints
as a convex (quadratic) cost of fiscal intervention scaled by a parameter γ which we refer to as the (inverse of)
government’s fiscal capacity. Unlike disclosure, fiscal interventions are undertaken after the aggregate state θ is
realized. Denoting the fiscal interventions by F and their cost by ΨF , welfare with fiscal interventions is
ˆ
w (θ, I, F) = w∗ (θ) − δ
LI,F
ˆ
a−
23
OI,F ∪LI,F
(qV − k) − γΨ2F
Figure 9: Welfare Normalized,π (θ) = βθχ
0
pm
E[w(p, θ)] − W F B
−0.1
−0.2
−0.3
−0.4
−0.5
χ=−1.5
χ=0
χ=7
−0.6
−0.7
0
0.2
0.4
p
0.6
0.8
1
This figure plots the welfare function W (p)for the specialization π (θ) = βθχ , and different values of χ. Welfare is normalized by its
first-best value (which is independent of p) to make the scale comparable.
With fiscal interventions, the mass of banks in L and O is a function both of the information set and of the fiscal
intervention.
4.1
Credit Guarantees
In the region zs ∈ [z R , z I ] where banks do not suffer runs but where credit markets are affected by adverse selection,
the government may want to intervene to unfreeze credit markets and increase investment. Philippon and Skreta
(2012) and Tirole (2012) study how to design such an intervention in order to minimize its cost for tax payers. In
our setup, we have the following result.
Proposition 11. The cost of intervention in markets with adverse selection equals the informational rents paid
to informed parties. Under the assumptions of this model, direct lending by the government, or the provision of
guarantees on privately issued debts, are constrained efficient.
Proof. See Philippon and Skreta (2012).
The proposition says that if the government chooses to intervene, it should either lend directly to the banks, or
it should provide guarantees on new debts. Since banks with the bad signal are liquidated and lose the investment
opportunity, they never receive support in the credit markets, but any bank that receives the good signal is a
potential beneficiary of this policy. For a given posterior on banks with the good signal z, the optimal policy consists
of choosing a number of banks α and guaranteeing loans made to those banks at the interest rate r = rg =
24
qV
k
,
so that good banks become willing to invest. Note that the policy always consists on either setting r = rg or
i
doing nothing, since (as explained below) setting r ∈ rg , 1q is costly on average for the government and does not
contribute to mitigating adverse selection. Setting r <
qV
k
is also costly and cannot increase investment further.
For a particular bank with posterior z, the cost of implementing the program is
z(k − rg k) + (1 − z)(k − qrg k) = z(k − qV ) + (1 − z)(k − q 2 V )
the cost is strictly positive as long as z ≤ z I . The net marginal benefit of implementing this program is given by
z(qV − k)
Note that the benefit is increasing in z, while the costs are decreasing in z. The total cost of the credit guarantee
program is
Ψk = α {k − qV [z (θ, p) (1 − q) + q]}
(12)
Ex-post welfare with a credit market policy α is
2
w (θ, pΨ) = w (θ, p) + 1 z (θ, p) ≤ z I αz (θ, p) (qV − k) − γ Ψk
(13)
where w (θ, p) is the private level of welfare as given in (8). The benefit of this policy is to increase the investment
of good banks: this happens with probability z (θ, p), the posterior probability of a bank that received the good
signal actually being good. This benefit is only possible if the market is frozen, or z (θ, p) ≤ z I . The final term
corresponds to the deadweight loss generated by government expenditures.
Since the intervention is ex-post, the government takes the aggregate state θ and the precision signal p as given13
when choosing the size of the intervention, solving the following program
max
α∈[0,n1 (θ,p)]
w θ, p, Ψk
The following lemma summarizes the solution to this program:
Lemma 12. The optimal credit guarantee policy is α = 0 for z ≥ z I and
(
α = min n1 (θ, p) ,
z (θ, p) (qV − k)
2γ {k − qV [z (θ, p) (1 − q) + q]}
for z < z I .
13 In
Section 5 we analyze fiscal policy and information disclosure jointly.
25
)
2
Proof. See Appendix B.
When z < z I and the credit market is frozen, the optimal policy consists of supporting a mass of banks that
is equal to the ratio of marginal benefits to marginal costs, adjusted by the total marginal cost of government
spending.
4.2
Deposit Insurance
The government may also intervene to prevent liquidation by banks that receive the bad signal and are therefore
susceptible to runs. Preventing runs on these banks is desirable both because liquidation is costly in itself, and
because banks that are run on become unable to invest at t = 1.
To prevent runs, the government announces deposit guarantees for a mass of banks β that have received the bad
signal. For these banks, the government guarantees to repay depositors the contractual deposit amount D at t = 2.
By offering this guarantee, the government prevents asset liquidation by assuming the risk of the deposit contract:
it commits to pay D to the depositors, and demands D from the bank. As in the decentralized equilibrium, some
banks may be unable to repay their senior debt, in which case the guarantee is costly for the government.
The cost of guaranteeing the deposits for a bad bank is
D − qD + (1 − q) Ab
That is, the government spends D, the amount it guarantees. Bad banks that survive a run invest with certainty:
if the investment is successful, which happens with probability q, the bank is solvent and thus able to repay the full
amount of the guarantee, D. With probability 1 − q, the investment opportunity fails and the government receives
the value of the bank’s legacy assets Ab , in which case the government makes a loss (since it had guaranteed
D > Ab ). It is therefore costly to guarantee deposits for bad banks in expectation.
The net benefit of guaranteeing the bank is
δAb + (qV − k)
The benefit has two components: first, legacy assets are not liquidated which entails a net benefit of δAb and,
second, bad banks that are saved always invest in the project.
The total cost of the deposit guarantee policy is
Ψd = β (1 − q) D − Ab
26
(14)
and ex-post welfare is
2
w(θ, p, Ψd ) = w (θ, p) + β δAb + qV − k − γ Ψd
(15)
The first term is decentralized welfare as defined in (8), the second term is the benefit of this policy: to prevent
liquidation costs and foregone investment by all bad banks whose deposits are insured by the government; and
the final line are government costs for the program. The government solves the following program for this ex-post
intervention
max
β∈[0,n0 (θ,p)]
w θ, p, Ψd
The optimal policy is summarized in Lemma 13.
Lemma 13. The optimal deposit guarantee for bad banks satisfies
(
β = min n0 (θ, p) ,
δAb + (qV − k)
)
2
2γ [(1 − q) (D − Ab )]
Proof. See Appendix B.
The general form of the optimal policy is very similar to that described in the case of the credit guarantee: the
optimal mass of banks to be saved is given by the ratio between the marginal benefits and the marginal costs of
the policy. In this case, these no longer depend on either θ or p because this policy only applies to banks receiving
the bad signal, which are known to be bad.
4.3
Combining Deposit Insurance and Credit Guarantees
To complete our description of equilibrium with fiscal intervention, we characterize the ex-post welfare function
when the government can use both policies.
2
w (θ, p, Ψ) = w (θ, p) + β δAb + qV − k + 1 z (θ, p) < z I αz (θ, p) (qV − k) − γ (Ψ)
(16)
where Ψ ≡ Ψk + Ψd is total spending. The first term is decentralized welfare, the second term are the benefits of
deposit insurance, the third term represents the benefits of credit guarantees, and the final term are the distortionary
costs of government spending. Optimal joint fiscal policy is the solution to
max w (θ, p, Ψ)
α,β
s.t. β ∈ [0, n0 (θ, p)]
α ∈ [0, n1 (θ, p)]
27
(17)
The government chooses α, β to maximize (16) subject to the constraints that the supported masses cannot exceed
the size of the respective target pools of banks. The optimal policy consists of comparing the marginal benefits of
the two policies, and first exhausting the policy that yields the highest marginal benefit to cost ratio. Only if that
policy is exhausted is the second ever used. The following Proposition summarizes the design of the optimal fiscal
interventions.
Proposition 14. (Optimal Joint Fiscal Policy) Define z c as
zc ≡ zI
1+ 1−
1
k
qV
(D−Ab )
δAb +qV −k
< zI
Then, the optimal joint fiscal policy is as follows: for z (θ, p) < z c , the planner exhausts the deposit policy first
(
(
))
M Bβ
β = max 0, min n0 (θ, p) ,
2γM Cβ2
(
(
))
M Bα (θ, p)
M Cβ
α = max 0, min n1 (θ, p) ,
2 − M C (θ, p) n0 (θ, p)
α
2γM Cα (θ, p)
for z (θ, p) ∈ z c , z I , the planner exhausts the credit policy first
(
(
α = max 0, min n1 (θ, p) ,
(
))
M Bα (θ, p)
2γM Cα (θ, p)
2
(
))
M Bβ
M Cα (θ, p)
β = max 0, min n0 (θ, p) ,
−
n1 (θ, p)
2γM Cβ2
M Cβ
and for z (θ, p) > z I , only the deposit policy is used
(
(
M Bβ
β = max 0, min n0 (θ, p) ,
2γM Cβ2
))
where
M Bα (θ, p) ≡ 1 z (θ, p) < z I z (θ, p) (qV − k)
M Bβ ≡ δAb + qV − k
and
M Cα (θ, p) ≡ k − qV [z (θ, p) (1 − q) + q]
M Cβ ≡ (1 − q) D − Ab
Proof. See Appendix B.
28
Figure 10: Optimal Joint Fiscal Policy, θ ∼ U z R , z I
Expected Support, Deposit Policy
Expected Support, Credit Policy
p=0
p=0.5
p=1
0.9
0.8
0.45
0.4
0.7
0.35
0.6
0.3
0.5
0.25
0.4
0.2
0.3
0.15
0.2
0.1
0.1
0.05
0
10
20
γ
30
40
0
50
10
20
γ
30
40
50
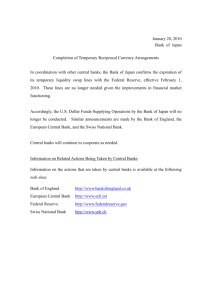
This figure depicts the optimal joint fiscal policy as a function of the fiscal capacity parameter γ, for different values of p. The left
panel plots the expected number of banks that receive credit support, while the right panel plots the expected number of banks that receive
deposit support.
While the marginal costs and benefits of the deposit policy are parametric, since this policy only applies to
bad banks, the costs and benefits of the credit policy depend on z (θ, p). Since this policy applies to both bad
and good banks, the composition of the class of banks that received the good signal matters. This policy is more
attractive the greater the perceived quality of the banks that received the good signal, and so will be prioritized for
combinations of θ and p that result in a greater z (θ, p): this happens because the marginal benefits of the credit
guarantee are weakly increasing in z (θ, p), while its marginal costs are strictly decreasing.
The amount of fiscal support is generally decreasing in the measure of fiscal capacity γ. Figure 10 illustrates
the expected mass of banks supported by each policy as a function of the fiscal capacity parameter γ. The left
panel plots the expected credit policy support, Eθ [α (θ, p)], while the right panel plots the expected deposit policy
support Eθ [β (θ, p)] for different levels of disclosure, p = {0, 0.5, 1}. For p = 0, a market freeze is certain, and no
runs occur. Thus the level of credit support is at a maximum, and the level of deposit support is zero. For p = 1,
the other polar case, all banks have their types revealed: there is no adverse selection so credit support is not
needed, and the deposit policy is at it most active for all γ. For the intermediate case, both policies are activated,
since both runs and market freezes occur with positive probability.
5
Disclosure with Fiscal Interventions
Having described the optimal ex-ante disclosure and ex-post fiscal policies separately, we now characterize the
problem of a government that has access to both types of policies. Note that the analysis of optimal fiscal policy
29
undertaken in Section 4 applies exactly: since fiscal policy is set after aggregate uncertainty has been realized, it is
also set for a given level of disclosure p; the previous section characterized fiscal policy for arbitrary pairs (θ, p). The
problem becomes then to maximize with respect to p, taking as given the ex-post choice of fiscal policy. Formally,
the government’s problem can be written as
max Eθ max w (θ, p, Ψ)
p∈[0,1]
s.t.
α,β
(18)
β ∈ [0, n0 (θ, p)] , ∀ (θ, p) ∈ z R , z I × [0, 1]
α ∈ [0, n1 (θ, p)] , ∀ (θ, p) ∈ z R , z I × [0, 1]
where the ex-post welfare function is as defined in (16). We begin the analysis by establishing that the government
weakly discloses more when fiscal policy is available.
Proposition 15. Disclosure is weakly greater when fiscal policy is available (0 ≤ γ < ∞) compared to when it is
not (γ = ∞).
Proof. See Appendix B.
This result is, in principle, not obvious in the sense that, by disclosing more, the planner is creating more
runs, but unfreezing markets. Therefore, in expectation, more disclosure increases the need for deposit insurance,
but decreases the need for credit guarantees. Thus, allowing for fiscal interventions, does not make disclosure
unambiguously better, in principle. The key mechanism that leads to this result is that more disclosure results in a
greater average quality of the pool of banks that receives the good signal, z1 (θ, p). This interacts with fiscal policy
in an extensive margin by increasing the likelihood of deposit insurance being activated, and reducing the likelihood
that credit guarantees are activated. This also interacts with fiscal policy in an intensive margin, however, by
reducing the marginal costs of credit guarantees, and increasing their marginal benefits. While there are no clear
benefits from increased disclosure in the extensive margin, disclosure is good for the intensive one.
We now proceed to present the main result of this paper: under certain conditions, it is possible to establish a
monotone relationship between the degree of fiscal capacity γ and the optimal choice of disclosure p∗ .
Proposition 16. When welfare is concave or convex, optimal disclosure p∗ is decreasing in γ.
Proof. See AppendixB.
The government discloses more when fiscal capacity is greater (or γ is lower).14 The left panel of Figure 11
depicts the optimal choice of disclosure p∗ as a function of γ, for θ ∼ U z R , z I . Optimal disclosure is (weakly)
decreasing in γ: high fiscal capacity translates into greater capability to provide credit and deposit guarantees - to
14 We conjecture, but do not prove, that the sufficient condition for concavity of the welfare function described in Proposition 9 also
apply to disclosure choice with fiscal policy: if the welfare function is, for example, concave without fiscal policy, the inclusion of fiscal
policy preserves concavity.
30
Figure 11: Optimal disclosure choice with fiscal policy
p∗ , Optimal Disclosure
E[Ψ], Expected Spending
0.25
1
Credit Guarantees
Deposit Insurance
0.9
0.2
0.8
0.7
0.15
0.6
0.5
0.1
0.4
0.3
0.05
0.2
0.1
0
0
5
γ
10
0
15
0
5
γ
10
15
This figure plots several variables as a function of γ, the measure of fiscal capacity. The left panel plots p∗ , the optimal
disclosure policy. The right panel plots expected spending, broken down by type of spending.
“mop up” in case a bad state of the world materializes, leading the government to choose high levels of disclosure.
As γ increases, and fiscal capacity becomes more limited, the government starts choosing intermediate levels of
disclosure, finally opting for no disclosure, p = 0, for γ high enough. The right panel plots expected government
spending Eθ [Ψ] given optimal disclosure p∗ , disaggregated by type of spending. For low levels of γ, the planner
chooses high disclosure, unfreezing markets and creating runs: it therefore offers plenty of deposit guarantees and
does not use the credit support program extensively. As the optimal level of disclosure decreases, the planner no
longer needs to offer deposit insurance, but increases the expected support in terms of the credit program.
To better understand the trade-offs faced by the planner, Figure 12 plots expected welfare with and without
fiscal policy. The chosen levels of fiscal capacity, γ = 1.7 and γ = 7.4 imply full and interior disclosure as optimal
policies, respectively. While in the baseline parametrization, the government chooses not to disclose at all, p = 0
for γ = ∞, the availability of fiscal policy increases the incentives to disclose since the government becomes capable
of solving both the runs and adverse selection problems directly. This creates the incentives to optimally take on
some more risk, and choosing an optimal p > 0, where runs are possible in equilibrium.
6
Conclusion
In this paper, we have developed a theoretical framework that generates a meaningful tradeoff for information
revelation. In an environment with informational asymmetries and where private agents have no incentives to
reveal any information, the burden of disclosure falls on the government. Revealing private information helps
in unfreezing credit markets, but can also cause inefficient liquidation of legacy assets due to bank runs. The
31
Figure 12: Expected Welfare with and without Fiscal Policy
6
E[w(p, θ, Ψ)]
5.9
5.8
5.7
pm
5.6
γ=1.7
γ=7.4
γ=∞
5.5
5.4
0
0.2
0.4
p
0.6
0.8
1
This figure plots expected welfare with optimal fiscal policy (blue solid line for low γ, dotted green line for high γ) and without
fiscal policy (dashed red line for γ = ∞).
government trades off these two sources of inefficiencies by optimally choosing the power of a test that reveals bad
banks with certainty, but may pool bad and good banks.
We find that the properties of the government’s pure disclosure problem are heavily dependent on the assumed
distribution of the aggregate state - the true fraction of good banks in the economy. During normal times, when the
financial system is generally viewed as solid and the distribution of the state is skewed to the left, the government
chooses intermediate levels of disclosure. In a financial crisis, or during times of high uncertainty, the distribution
of bank quality may be skewed to the left, in which case the planner may have incentives to adopt more extreme
disclosure policies.
Our main result is that a planner’s fiscal capacity is a key determinant of the optimal disclosure policy. When
fiscal capacity is high, it is optimal for the planner to reveal information and provide deposit insurances to at least
a subset of banks that are vulnerable to runs, such that these banks survive and are able to invest in profitable
projects, as well as credit guarantees to banks that are vulnerable to market freezes. When fiscal capacity is low,
the planner prefers to avoid runs and the issuance of deposit guarantees by not disclosing much information, and
then mitigate the resulting adverse selection in the credit market by providing credit guarantees only.
Our model can help shed light on the different approaches towards disclosure and stress testing that were
adopted on either side of the Atlantic. It is generally accepted that stress tests in the US involved greater levels
of disclosure in Europe. Our model suggests that this difference in policies is related to the asymmetry in fiscal
capacities between the two regions.
32
.
33
A
Parameters used in examples
To generate the figures, we use the parametrization in the table below.
Table 1: Parametrization for Numerical Examples
Parameter
Description
Value
Ag
Ab
D
V
q
k
(1 − δ)
Good Assets
Bad Asset
Deposits
Project Payoff
Prob. Success
Investment Cost
Recovery Rate
10.3
0.9
1.6
10.9
0.2
1.8
0.2
Unless otherwise noted, most examples use γ = 5.
B
Proofs
Proof of Lemma 5
Proof. Without runs, welfare can be written as
ˆ
g
b
zI
Eθ [w (θ, p)] = E [θ] A + E [1 − θ] A + qV − k +
max[θ I (p),z R ]
θ (qV − k) dΠ (θ)
The derivative of welfare with respect to p is
I
I
I
dθI (p)
dEθ [w (θ, p)]
R
= 1 θ (p) ≥ z π θ (p) θ (p) (qV − k) −
≥0
dp
dp
It is strictly positive for p : θI (p) ≥ z R , and zero otherwise. Welfare is then weakly increasing in p, and so full
disclosure is (weakly) optimal.
Proof of Lemma 6
Proof. Without adverse selection, expected welfare can be written as
Eθ [w (θ, p)] = pE [1 − θ] (1 − δ)Ab + E [θ] (Ag + qV − k) + (1 − p) E [1 − θ] Ab + qV − k
34
The derivative with respect to p is
dEθ [w (θ, p)]
= −E [1 − θ] δAb + qV − k < 0
dp
strictly negative for p ∈ [0, 1]. Therefore, p = 0 is optimal.
Proof of Lemma 7
Proof. Welfare with runs and lemons is given by 9. The derivative of expected welfare with respect to p is
I
I
I
dEθ [w (θ, p)]
dθI (p)
R
= 1 θ (p) ≥ z π θ (p) θ (p) (qV − k) −
− E [1 − θ] δAb + qV − k
dp
dp
The first term is only positive for p ≤ pm , while the second term is always negative. Thus welfare is strictly
decreasing for p > pm .
Proof of Proposition 8
Proof. For any distribution π (θ), the derivative of expected welfare with respect to p is
I
I
I
dEθ [w (θ, p)]
dθI (p)
R
= 1 θ (p) ≥ z π θ (p) θ (p) (qV − k) −
− E [1 − θ] δAb + qV − k
dp
dp
We can write the second derivative of expected welfare with respect to p as
d2 Eθ [w (θ, p)]
= −1 θI (p) ≥ z R (qV − k) π θI (p)
2
dp
(
dθI (p)
dp
2 "
)
#
π 0 θI (p)
d2 θI (p)
I
1 + θ (p)
+ θ (p)
π [θI (p)]
dp2
I
Replace for the derivatives of θI (p) and simplify to obtain
I
1/z I − 1 I
I
d2 Eθ [w (θ, p)]
R
I
I
= 1 θ (p) ≥ z (qV − k) π θ (p)
4 3 − 1/z − χ θ (p) 1/z − 1 − 2p
I
dp2
(1/z − p)
(19)
Note that all the terms except for the last one are strictly positive for p ≤ pm . The shape of the welfare function
is therefore determined by the sign of this last term. For the welfare function to be strictly concave, we need this
term to be strictly negative for any p ∈ [0, pm ]. This is equivalent to
3 − 1/z I − χ θI (p) 1/z I − 1 − 2p < 0
3 − 1/z I − 2p
⇔χ θI (p) >
1/z I − 1
35
Note that the right-hand side is strictly decreasing on p. It is then enough to show that
3z I − 1
3 − 1/z I − 2p
=
minm χ θI (p) > maxm
I
1/z − 1
1 − zI
p∈[0,p ]
p∈[0,p ]
So that a sufficient (but not necessary) condition for this to be satisfied is to ensure that
χ (θ) >
3z I − 1
, ∀θ ∈ z R , z I
1 − zI
In this case, the expected welfare function is strictly concave on [0, pm ], and so the first-order condition is sufficient
and necessary for the optimum
I
I
dEθ [w (θ, p)]
dθI (p)
= π θ (p) θ (p) (qV − k) −
− E [1 − θ] δAb + qV − k = 0
dp
dp
Equivalently, we can establish a sufficient condition for convexity by ensuring that the last term of 19 is strictly
positive. This happens, whenever
3 − 1/z I − 2p
χ θI (p) <
1/z I − 1
It is enough to show that
maxm χ θI (p) <
p∈[0,p ]
minm
p∈[0,p
3 − 1/z I − 2p
3z R − 1
=
I
1/z − 1
1 − zR
]
A sufficient condition for this is to ensure that
χ (θ) <
3z R − 1
, ∀θ ∈ z R , z I
R
1−z
In this case, due to strict convexity of the welfare function, the optimum must be at one of the boundaries of the
choice set. These are 0 and pm . We can evaluate expected welfare at each of these points and compare the values
Eθ [w (θ, p)]|p=0 = E [θ] Ag + E [1 − θ] Ab + qV − k
Eθ [w (θ, p)]|p=pm = E [θ] (Ag + qV − k) + pm E [1 − θ] (1 − δ)Ab + (1 − pm ) E [1 − θ] Ab + qV − k
The planner prefers not to disclose, p = 0, if and only if
Eθ [w (θ, p)]|p=0 ≥ Eθ [w (θ, p)]|p=pm
pm ≥
E [θ]
1
b
E [1 − θ] 1 + qVδA−k
36
Proof of Corollary 9
Proof. (i) and (ii) follow directly from the proof to Proposition 9. To show (iii), note that the term whose sign
determines the concavity or convexity of welfare is now given by
3 − 1/z I − χ 1/z I − 1 − 2p
and so it is strictly decreasing in p. For χ ∈
h
3z R −1 3z I −1
, 1−zI
1−z R
i
, this term is strictly positive for p = 0 and strictly
negative for p = pm . It crosses zero at
pc =
1
3 − 1/z I − χ 1/z I − 1
2
So welfare is convex for p ∈ [0, pc ] and concave for p ∈ [pc , pm ].
Proof of Lemma 11
Proof. The first-order condition follows from taking the derivative of (13) with respect to α,
2
1 z (θ, p) < z I z (θ, p) (qV − k) − 2γα [k − qV (z (θ, p) (1 − q) + q)] ≤ 0
The first term (marginal benefits) is zero for z (θ, p) ≥ z I and positive otherwise. The second term (marginal costs)
is always positive for α > 0. This means that the optimal policy is α = 0 for z (θ, p) ≥ z I , and interior otherwise
α=
z (θ, p) (qV − k)
2
2γ [k − qV (z (θ, p) (1 − q) + q)]
up to being contained in the [0, n1 (θ, p)] interval.
Proof of Lemma 12
Proof. The first-order condition follows from taking the derivative of 15 with respect to β,
b
2
δA + qV − k − 2γβ (1 − q) D − Ab
≤0
The optimal policy is then
β=
δAb + qV − k
2
2γ [(1 − q) (D − Ab )]
up to being contained in the [0, n0 (θ, p)] interval.
37
Proof of Proposition 13
Proof. Define the marginal benefits and marginal costs for each policy as
M Bα (θ, p) ≡ 1 z (θ, p) < z I z (θ, p) (qV − k)
M Bβ ≡ δAb + qV − k
and
M Cα (θ, p) ≡ k − qV [z (θ, p) (1 − q) + q]
M Cβ ≡ (1 − q) D − Ab
The first-order conditions with respect to each of the policies are
M Bα (θ, p)
− 2γΨ ≤ 0
M Cα (θ, p)
M Bβ
β:
− 2γΨ ≤ 0
M Cβ
α:
where Ψ = αM Cα + βM Cβ is total fiscal spending.
Consider first the situation in which z ≥ z I . Then, M Bα = 0, and the FOC for α reads
−2γΨ ≤ 0
with a strict inequality if α > 0. This implies that α = 0 is optimal. We then have that Ψ = βM Cβ , and the FOC
for β becomes
β=
M Bβ
∈ [0, n0 (θ, p)]
2γM Cβ2
Consider now the case in which z < z I . In this case, both policies yield positive marginal benefits. First, note
that the marginal benefits of each policy are constant and positive, while marginal costs are increasing from 0. Thus
setting α = 0 and β = 0. cannot be optimal, as the planner could benefit from raising at least one of the policies.
Furthermore, the first-order conditions form a linear system of inequalities, and depend on the controls α, β only
through the total spending term. The policies solve the following system of inequalities
1 M Bα (θ, p)
− M Cβ β, α ∈ [0, n1 (θ, p)]
2γ M Cα (θ, p)
1 M Bβ
M Cβ β =
− M Cα (θ, p) α β ∈ [0, n0 (θ, p)]
2γ M Cβ
M Cα (θ, p) α =
This is equivalent to solving a demand system for substitute goods with upper bounds on consumption: the planner
38
will choose the policy that yields the best marginal benefit to marginal cost ratio up to capacity, and only then
choose the following policy. Consider first the case in which
M Bα (θ, p)
M Bβ
≥
M Cα (θ, p)
M Cβ
This condition is equivalent to
z (θ, p) ≥ z I
1+ 1−
1
k
qV
(D−Ab )
δAb +qV −k
≡ zc
In this case, the planner sets α first, since it yields a greater benefit-to-cost ratio. The optimal α satisfies
(
(
α = max 0, min n1 (θ, p) ,
))
M Bα (θ, p)
2
2γM Cα (θ, p)
and the optimal β becomes active only if α is at capacity. We can write the optimal choice as
(
(
))
M Bβ
M Cα (θ, p)
β = max 0, min n0 (θ, p) ,
n1 (θ, p)
−
2γM Cβ2
M Cβ
The opposite case, in which β yields the greater marginal benefit to cost ratio occurs when z (θ, p) ≤ z c < z I . In
this case, the policies are analogous
(
(
M Bβ
β = max 0, min n0 (θ, p) ,
2γM Cβ2
))
and
(
(
))
M Cβ
α = max 0, min n1 (θ, p) ,
2 − M C (θ, p) n0 (θ, p)
α
2γM Cα (θ, p)
M Bα (θ, p)
It is possible to tighten this characterization. First, define
θc (p) : z (θc (p) , p) = z c ⇔ θc (p) =
1−p
1/z c − p
Note then that for θ ≤ θc (p), β is set first. Furthermore, it is set to a value that does not depend on the state,
(θ, p). This means that we can easily obtain the threshold θ beyond which β (θ, p) hits its upper bound, n0 (θ, p).
β hits the upper bound when
M Bβ
≥ n0 (θ, p) = p (1 − θ)
2γM Cβ2
⇔θ ≥1−
1 M Bβ
≡ θβ (p)
p 2γM Cβ2
Finally, we can do the same for the interval in which α (θ, p) is preferred. This case is slightly more complicated,
39
since the marginal benefits and costs of this policy also depend on (θ, p). We can show that the region for which
the planner sets α (θ, p) ≥ n1 (θ, p) is given by
z (θ, p) (qV − k)
2
2γ [qV (1 − q)] (z I − z (θ, p))
2
≥ θ + (1 − p) (1 − θ)
⇔0≥θ
2
1 − pz
I 2
"
− θ 2 1 − pz
I
I
(1 − p) z +
#
qV − k
2
2γ [qV (1 − q)]
2
+ (1 − p) z I
The roots of the above inequality are
"
θ
α,±
I
(p) = θ (p) +
qV − k
#
2
4γ [qV (1 − q) (1 − pz I )]
v"
u
u
± t θI (p) +
qV − k
#2
2
2
4γ [qV (1 − q) (1 − pz I )]
− [θI (p)]
Let θα,− (p) denote the negative root and θα,+ (p) the positive one. Note that the positive root is strictly greater
than θI (p): but the planner does not use α (θ, p) in that case. Let then θα (p) ≡ θα,− (p) be the only plausible root.
A full characterization of fiscal policy in terms of the aggregate state is: for θ ∈ z R , θβ(p) ∪ θI (p) , z I , the
planner sets an interior β (θ, p) and α (θ, p) = 0. For θ ∈ θβ (p) , θc (p) , the planner sets β (θ, p) = n0 (θ, p) and
α (θ, p) > 0. For θ ∈ [θc (p) , θα (p)], the planner sets an interior α (θ, p) and β (θ, p) = 0. For θ ∈ θα (p) , θI (p) ,
the planner exhausts α (θ, p) = n1 (θ, p) and sets β (θ, p) > 0.
Proof of Proposition 14
Proof. First, we note that we can write the disclosure problem as follows
max Eθ max w (θ, p, Ψ)
p∈[0,1]
α,β
n
h
io
2
= max Eθ [w (θ, p)] + Eθ [M Bβ β (θ, p)] + Eθ 1 z (θ, p) < z I M Bα (θ, p) α (θ, p) − γE (M Cβ β (θ, p) + M Cα (θ, p) α (θ, p))
p∈[0,1]
where Eθ [w (θ, p)] is the welfare function that we analyzed in the case of disclosure only, equation (9) andα (θ, p) , β (θ, p)
are the optimal policies derived in the previous section. This means that the first-order condition for disclosure will
now be
dEθ [w (θ, p, Ψ)] dEθ [w (θ, p)]
=
dp
dp
dβ (θ, p)
+Eθ
(M Bβ − 2γM Cβ Ψ (θ, p))
dp
dα (θ, p) I
+Eθ
1 z (θ, p) < z M Bα (θ, p) − 2γM Cα (θ, p) Ψ (θ, p)
dp
dM Cα (θ, p)
I dM Bα (θ, p)
+Eθ α (θ, p) 1 z (θ, p) < z
− 2γΨ (θ, p)
dp
dp
I
dθ (p)
+1 [p ≤ pm ] π θI (p)
M Bα θI (p) , p α θI (p) , p
dp
40
The term in the first line is the original derivative. The term in the last line is equal to zero, since the optimal
policy prescribes no credit support in the absence of a market freeze α θI (p) , p = 0. The term in the second line
is weakly positive. To see this, note that at an interior optimum, we have that the second factor is equal to zero,
since it equals the first-order condition for β
M Bβ − 2γM Cβ Ψ (θ, p) = 0
So this term is non-zero when the above first-order condition is either negative or positive. When the first-order
condition is negative, the planner finds it optimal to set β (θ, p) = 0, and so the derivative
dβ(θ,p)
dp
is zero. When it
is positive, it means that this policy is constrained above, or
β (θ, p) = n0 (θ, p) ⇒
dβ (θ, p)
=1−θ >0
dp
Since the term in the second line is the expectation of terms that are either zero or positive, it is non-negative. The
sum of the terms in the third and fourth lines can be shown to be weakly positive as well. To see this, note that it
is composed of two terms: the second term in the sum can be shown to be strictly positive, since
dM Bα (θ, p)
dz (θ, p)
= (qV − k)
>0
dp
dp
dM Cα (θ, p)
dz (θ, p)
= −qV (1 − q)
<0
dp
dp
while the first term will be either zero or negative. Following an argument similar to the one for the term on the
second line, we can show that the first term is zero whenever α (θ, p) < n1 (θ, p). The only instances in which this
term is non-zero is when α (θ, p) = n1 (θ, p). Generally, we can write this term as
dα (θ, p) I
Eθ
1 z (θ, p) < z M Bα − 2γM Cα Ψ (θ, p)
dp
ˆ
=−
(1 − θ) 1 z (θ, p) < z I M Bα (θ, p) − 2γM Cα (θ, p) Ψ (θ, p) dΠ (θ)
α(θ,p)=n1 (θ,p)
and we have, for the second term, that
dM Cα (θ, p)
I dM Bα (θ, p)
− 2γΨ (θ, p)
Eθ α (θ, p) 1 z (θ, p) < z
dp
dp
ˆ
dz (θ, p)
≥
α (θ, p)
[qV − k + 2γΨ (θ, p) qV (1 − q)] dΠ (θ)
dp
α(θ,p)=n1 (θ,p)
41
This means that we can write the sum of the third and fourth lines as
dα (θ, p) 1 z (θ, p) < z I M Bα (θ, p) − 2γM Cα (θ, p) Ψ (θ, p)
dp
dM Bα (θ, p)
dM Cα (θ, p)
+Eθ α (θ, p) 1 z (θ, p) < z I
− 2γΨ (θ, p)
dp
dp
ˆ
≥−
(1 − θ) 1 z (θ, p) < z I M Bα (θ, p) − 2γM Cα (θ, p) Ψ (θ, p) dΠ (θ)
Eθ
ˆ
α(θ,p)=n1 (θ,p)
dz (θ, p)
[qV − k + 2γΨ (θ, p) qV (1 − q)]
dp
α(θ,p)=n1 (θ,p)
ˆ
dz (θ, p)
=
n1 (θ, p)
− z (θ, p) (1 − θ) [qV − k + 2γΨ (θ, p) qV (1 − q)] + (1 − θ) 2γΨ (θ, p) k − q 2 V dΠ (θ)
dp
α(θ,p)=n1 (θ,p)
ˆ
=
(1 − θ) 2γΨ (θ, p) k − q 2 V dΠ (θ)
+
α (θ, p)
α(θ,p)=n1 (θ,p)
≥0
This implies that
dEθ [w (θ, p, Ψ)]
dEθ [w (θ, p)]
≥
dp
dp
When fiscal policy is available, welfare is at least as increasing in disclosure as when fiscal policy is not available.
This reveals a (weak) preference for disclosure under the availability of fiscal policy.
Proof of Proposition 15
Proof. Consider first the case in which welfare is strictly concave. This implies that
d2 Eθ [w (θ, p, Ψ)]
<0
dp2
and, furthermore, the first-order condition with respect to p is necessary and sufficient. The FOC satisfies
dEθ [w (θ, p, Ψ)]
=0
dp
⇔Φ (p, γ) = 0
From the implicit function theorem, we have that
∂p
=−
∂γ
∂Φ
∂p
−1 ∂Φ
∂γ
By assumption, the objective function is concave, and thus the optimum p is interior, or
∂Φ
d2 Eθ [w (θ, p, Ψ)]
<0
=
∂p
dp2
42
We can compute the second term
∂Φ
=
∂γ
∂
dEθ [w(θ,p,Ψ)]
dp
∂Φ
∂γ
as
∂γ
∂ 2 β (θ, p)
∂ 2 α (θ, p) = Eθ
[M Bβ − 2γM Cβ Ψ (θ, p)] +
1 z (θ, p) < z I M Bα (θ, p) − 2γM Cα (θ, p) Ψ (θ, p)
∂p∂γ
∂p∂γ
dM
B
(θ,
p)
dM Cα (θ, p)
dΨ (θ, p)
∂α (θ, p)
α
1 z (θ, p) < z I
− 2γΨ (θ, p)
− 2Eθ Ψ (θ, p)
+Eθ
∂γ
dp
dp
dp
∂α (θ, p)
dM
B
(θ,
p)
dM
C
(θ,
p)
dΨ (θ, p)
α
α
= Eθ
1 z (θ, p) < z I
− 2γΨ (θ, p)
− 2Eθ Ψ (θ, p)
∂γ
dp
dp
dp
Notice that the first two terms are equal to zero: the first-order conditions are only positive whenever the policies
are at the upper bound, in which case they do not depend on γ. This condition is negative or zero for α (θ, p) = 0
or α (θ, p) = n1 (θ, p). The only interesting case is then when α (θ, p) is interior. Consider first the case in which
β (θ, p) = 0. Then, this term is equal to
∂Φ
z (θ, p) (qV − k)
α (θ, p) dz (θ, p)
=Eθ −
1 z (θ, p) < z I (qV − k) + 2γ
qV (1 − q)
∂γ
γ
dp
2γM Cα
z (θ, p) (qV − k) dz (θ, p) (qV − k)
k − q2 V
− Eθ
2γM Cα
dp
2γM Cα2
z (θ, p) (qV − k)
dz (θ, p) (qV − k) α (θ, p) 2
= − Eθ
1 z (θ, p) < z I M Cα + z (θ, p) qV (1 − q) +
k
−
q
V
dp
M Cα
γ
2γ 2γM Cα2
<0
Note then that this term is always negative. Consider now the case in which α (θ, p) is interior, and β (θ, p) =
n0 (θ, p). Then, the derivative is
∂Φ
z (θ, p) (qV − k)
M Bα dz (θ, p)
z (θ, p) (qV − k) dΨ (θ, p)
I
=Eθ − 2
1
z
(θ,
p)
<
z
(qV
−
k)
+
2γ
qV
(1
−
q)
−
E
θ
∂γ
2γ M Cα2
dp
2γM Cα
γM Cα
dp
z (θ, p) (qV − k) (qV − k) dz (θ, p)
dΨ (θ, p)
= − Eθ
1 z (θ, p) < z I M Cα + z (θ, p) qV (1 − q) +
γM Cα
2γM Cα2
dp
dp
z (θ, p) (qV − k) (qV − k) dz (θ, p)
dz (θ, p) (qV − k)
I
2
= − Eθ
1
z
(θ,
p)
<
z
M
C
+
z
(θ,
p)
qV
(1
−
q)
+
k
−
q
V
α
γM Cα
2γM Cα2
dp
dp
2γM Cα2
<0
Also negative. This implies that
∂Φ
≤0
∂γ
and so, if welfare is concave,
∂p
≤0
∂γ
43
Note that the sign derivation of
∂Φ
∂γ
≤ 0 does not depend on any specific properties of the welfare function, or the
distribution π (θ). These are relevant only to the extent that assumptions are required to ensure that
∂Φ
∂p
≤ 0 as
well. Even if we are not able to establish strict concavity of the welfare function, the above result holds for any
welfare function that is locally concave at the optimal disclosure point.
For the second part of the proposition, assume now that welfare is convex. Then, the solution is at a corner,
either at p = 0 or p = pm . If p = 0, there is no disclosure, and so there are no runs. This means that β (θ, 0) = 0,
n
o
M Bα (θ,0)
and α (θ, 0) = min 1, 2γM
. Expected welfare is
2
C (θ,0)
α
h
i
2
Eθ [w (θ, 0, Ψ)] =Eθ [w (θ, 0)] + Eθ [M Bα (θ, 0) α (θ, 0)] − γEθ (M Cα (θ, 0) α (θ, 0))
ˆ θα
ˆ zI n
2
o
M Bα (θ, 0)
2
g
b
=Eθ [θ] A + Eθ [1 − θ] A + qV − k +
M Bα (θ, 0) − γ [M Cα (θ, 0)] dΠ (θ)
2 dΠ (θ) +
z R 4γM Cα (θ, 0)
θα
where θα (0) is the smaller root of
M Bα (θ, 0)
2
2γM Cα (θ, 0)
=1
1
θ =z +
−
4γ (qV − k)
α
s
I
1
1
+ 2z I
4γ (qV − k) 4γ (qV − k)
n
o
MB
If p = pm , there is no adverse selection. This means that α (θ, pm ) = 0, and β (θ, pm ) = min pm (1 − θ) , 2γM Cβ 2 .
β
Let θm = 1 −
1 M Bβ
pm 2γM Cβ2 ,
the level of θ beyond which all bad banks whose types are disclosed are supported. Then,
welfare is
h
i
2
Eθ [w (θ, pm , Ψ)] =Eθ [w (θ, pm )] + Eθ [M Bβ β (θ, pm )] − γEθ (M Cβ β (θ, pm ))
=Eθ [θ] (Ag + qV − k) + Eθ [1 − θ] (1 − pm ) Ab + qV − k + pm (1 − δ)Ab
ˆ zI
M Bβ2
m
+
Π
(θ
)
+
pm (1 − θ) M Bβ − γM Cβ2 pm (1 − θ) dΠ (θ)
2
4γM Cβ
θm
The planner prefers no disclosure if and only if the following parametric restriction is satisfied,
ˆ
θα
m
M Bβ p Eθ [1 − θ] +
ˆ
2
M Bα (θ, 0)
2 dΠ (θ) +
zI
n
o
2
M Bα (θ, 0) − γ [M Cα (θ, 0)] dΠ (θ)
4γM Cα (θ, 0)
θα
I
ˆ
z
M Bβ2
m
≥E [θ] (qV − k) +
Π
(θ
)
+
pm (1 − θ) M Bβ − γM Cβ2 pm (1 − θ) dΠ (θ)
2
4γM Cβ
θm
zR
44
or
ˆ
θm
m
M Bβ p
zR
#
"ˆ α
ˆ θm
θ
M Bβ2
M Bα2
1
dΠ (θ) −
(1 − θ) dΠ (θ) − (qV − k)
θdΠ (θ) +
2 dΠ (θ)
4γ zR M Cα2
z R M Cβ
zR
"ˆ I
#
ˆ zI
z
2
2
m
−γ
M Cα dΠ (θ) −
[p (1 − θ) M Cβ ] dΠ (θ)
ˆ
θα
θα
θm
≥0
It is enough to show that this restriction is less likely to be binding as γ ↑. That is, as fiscal capacity decreases, the
planner is more likely to choose p = 0 than p = pm . For this, define the above inequality as Λ (γ) ≥ 0; we want to
show that
∂Λ (γ)
≥0
∂γ
To show this, take the derivative, noting that the only parameters that implicitly depend on γ are θm and θα ,
(
)
m
M Bβ2
∂Λ (γ)
2
m ∂θ
m
m
m
m
= π (θ )
p (1 − θ ) M Bβ −
− γ [p (1 − θ ) M Cβ ]
∂γ
∂γ
4γM Cβ2
)
(
α
α 2
∂θ
M
B
(θ
)
α
2
α
−π (θα )
M Bα (θα ) −
2 − γ [M Cα (θ )]
∂γ
4γM Cα (θα )
"ˆ α
# "ˆ I
#
ˆ θm
ˆ zI
θ
z
M Bβ2
1
M Bα2
2
2
m
− 2
dΠ (θ) −
M Cα dΠ (θ) −
[p (1 − θ) M Cβ ] dΠ (θ)
2 dΠ (θ) −
2
4γ
z R M Cα
z R M Cβ
θα
θm
"ˆ m
# "ˆ I
#
ˆ θα
ˆ zI
θ M B2
z
1
M Bα2
β
2
m
2
= 2
dΠ (θ) +
[p (1 − θ) M Cβ ] dΠ (θ) −
M Cα dΠ (θ)
2 dΠ (θ) −
2
4γ
θα
z R M Cβ
θm
z R M Cα
"
# ˆ I
ˆ θα
z
M Bβ2
M Bα2
1
dΠ
(θ)
−
−
M Cα2 dΠ (θ)
= 2
2
4γ
M Cβ2
θα
z R M Cα
#)
(
"
2
2
1
M Bβ
M Bα (θα )
α 2
2
α
≥ 2
− 4γ Π (θ )
2 − M Cα (θ )
4γ
M Cβ
4γ 2 M Cα (θα )
2
1
M Bβ
= 2
≥0
4γ
M Cβ
We then conclude that the inequality is indeed less likely to bind as γ ↑, so that the planner will (weakly) prefer to
disclose less, set p = 0.
C
General Model for θ, θ̄ ⊃ z R , z I
In this section, we present the general set-up where the support of the distribution π (θ) is larger than z R , z I .
Note that, in this case, full system-wide runs are possible if θ < z R . Similarly, a good state where neither runs nor
adverse selection arise in equilibrium is possible for θ ≥ z I . The analysis of the cases in which the support of θ is a
strict subset of z R , z I follow from specializations of the analysis in the main text.
45
Define thresholds θR (p) and θI (p) given by
θR (p)
=
θI (p)
=
1−p
1/z R − p
1−p
1/z I − p
The main analysis disregards θR (p), since θ ≥ z R , but this threshold is relevant for the general case. It is the
threshold below which banks that receive the good signal are run on. Expected welfare for the private equilibrium
can be written as
Eθ [w (θ, p, Ψ)]
2
= ȳ1 − γ (Ψ) + pE [1 − θ] (1 − δ)Ab
ˆ max[θR (p),θ]
g
+ (1 − δ)
θA + (1 − θ) (1 − p) Ab dΠ (θ)
ˆ
θ
θ̄
g
θA + (1 − θ) (1 − p) Ab + qV − k dΠ (θ)
+
max[θ R (p),θ]
ˆ
θ̄
+
max[θ I (p),θ]
θ (qV − k) dΠ (θ)
The first line is as before, and contains the endowment, the fiscal costs and the costs from disclosing banks that are
bad with certainty. The second line is the new component: by letting θ ≤ z R , we are allowing for the possibility
of system-wide runs, in which even banks with the good signal suffer a run. This happens if the aggregate state,
the average quality of the banks, is low enough, and the level of disclosure is also low enough. Thus the general
case contains an additional benefit of disclosure that was not present in the main analysis: by disclosing more, the
planner is reducing the likelihood that the good pool suffers a run (or even eliminating it altogether).
First-best welfare is as before, and corresponds to the situation in which there are no runs and all banks invest
w∗ = Ab E [1 − θ] + Ag E [θ] + qV − k
C.1
Economy without Runs
As before, it is useful to understand the impact of disclosure on each source of inefficiency separately, before moving
to the analysis of the full problem. In this case, we can write welfare as
ˆ
max[θ I (p),θ ]
Eθ [w (θ, p)] = ȳ1 +
θ
ˆ
θ̄
+
max[θ I (p),θ]
=
g
θA + (1 − θ) Ab + qV − k dΠ (θ)
θ (Ag + qV − k) + (1 − θ) Ab + qV − k dΠ (θ)
ˆ
b
ȳ1 + E [1 − θ] A + qV − k + A E [θ] + (qV − k)
46
θ̄
g
θdΠ (θ)
max[θ I (p),θ]
Welfare is weakly increasing in disclosure in the absence of runs, since
dθ I (p)
dp
< 0: by disclosing more, the planner
unfreezes markets at no cost. This is true up to p such that θI (p) = θ, beyond which disclosure has no effect on
welfare. We can then define
pI : θI pI = θ ⇔ pI =
zI − θ
(1 − θ)
zI
as the maximum p for which welfare is increasing in disclosure. Note that this is the equivalent to the threshold pm
defined in the main text.
C.2
Economy without Lemons
Assume now that there is no adverse selection problem in credit markets. This allows us to write expected welfare
as
ˆ
Eθ [w (θ, p)]
= ȳ1 +
b
pE [1 − θ] (1 − δ)A + (1 − δ)
ˆ
θ
g
θA + (1 − θ) (1 − p) Ab dΠ (θ)
θ̄
+
max[θ R (p),θ]
ˆ
=
max[θ R (p),θ ]
(1 − δ)
θ
θ (Ag + qV − k) + (1 − θ) (1 − p) Ab + qV − k dΠ (θ)
max[θ R (p),θ ]
ˆ
g
θA + (1 − θ) Ab dΠ (θ) +
θ̄
max[θ R (p),θ]
θ (Ag + qV − k) + (1 − θ) (1 − p) Ab + qV −
Contrary to the baseline analysis, in which no trade-off exists and welfare is strictly decreasing in disclosure,
disclosure now has a benefit when it comes to runs: by disclosing, the planner will be reducing the likelihood that
the economy finds itself in the midst of a system-wide run, when θ < z R . This means that optimal disclosure,
without adverse selection, can potentially be different from p = 0. The derivative of expected welfare with respect
to p is
dEθ [w (θ, p)]
dp
dθR (p) R
1 θR (p) ≥ θ π θR (p) −
θ (p) [δAg + qV − k] + (1 − p) 1 − θR (p) δAb + qV − k
dp
ˆ θ̄
−
(1 − θ) δAb + qV − k dΠ (θ)
=
max[θ R (p),θ]
Note that the first component of the derivative only depends on p for θR (p) ≥ θ: as with adverse selection, beyond
a certain point, disclosure is so high that a system-wide run becomes impossible. We can let that point be denoted
as
pR : θR pR = θ ⇔ pR =
zR − θ
z R (1 − θ)
For p ≥ pR , the derivative of welfare is equal to the term on the second line only, and thus strictly negative.
Expected welfare is strictly decreasing on disclosure for p ≥ pR , since disclosing anything beyond this point has no
impact on the probability of a system-wide run (which is averted with certainty) and only causes inefficient runs
47
on bad banks. This logic is similar to the one in the baseline model.
Focusing on p ≤ pR , there are benefits and costs to disclosure. The second derivative of the welfare function isd2 Eθ [w (θ, p)]
dp2
)
2
R
d2 θR (p) R
dθR (p)
+ π θ (p)
θ (p) [δAg + qV − k] + (1 − p) 1 − θR (p) δAb + qV −
2
dp
dp
R
2
dθ (p) g
dθR (p)
− π θR (p)
δ A − (1 − p) Ab + p (qV − k) + 2π θR (p)
1 − θR (p) δAb + qV − k
dp
dp
(
0
= − π θR (p)
Note that both terms in the second line are negative. For the first line, it is enough to show that the first factor is
positive to establish the entire term as negative. We can sign it as
2
R
π 0 [θ R (p)] (1/z R −1)
1/z R −1
π θ (p) −2 (1/zR −p)3 + π[θR (p)] (1/zR −p)4
R
1/zR −1 1
R
π 0 [θ R (p)]
R
= π θ (p) (1/zR −p)3 1−p −2 + 2p + 1/z − 1 θ (p) π[θR (p)]
1/zR −1 1 R
χ θ (p) 1/z R − 1 − 2 + 2p
π θR (p) (1/z
R −p)3 1−p
=
It is then enough that the term in brackets be positive. This happens when
2 (1 − p)
2z R
min χ θR (p) ≥ max
=
R
p
p 1/z − 1
1 − zR
This then becomes a sufficient condition for concavity of the welfare function. This means that the optimum is
interior and solves the first-order condition.
C.3
Full Economy
We now proceed to the disclosure problem in the full economy. As before, the general problem without fiscal policy
is
max Eθ [w (θ, p)]
p∈[0,1]
where the objective function can be written as
Eθ [w (θ, p)]
= ȳ1 + (1 − δ)Ab
(
ˆ
R
+ 1 p≤p
(1 − δ)
θ
(ˆ
+
1 pR ≤ p ≤ pI
(ˆ
+
1 p≥p
I
θ
θ̄
θ
ˆ
θ R (p)
θ Ag − Ab dΠ (θ) +
θ̄
θ R (p)
θ Ag − (1 − δ)Ab − (1 − p) δAb + qV − k + (1 − p)
ˆ
θ̄
θ Ag − (1 − δ)Ab − (1 − p) δAb + qV − k + (1 − p) δAb + qV − k dΠ (θ) +
θ̄
θ
θ I (p)
)
b
g
b
b
θ A − (1 − δ)A + qV − k − (1 − p) δA + qV − k + (1 − p) δA + qV − k dΠ (θ)
48
We can recover the previous result that the planner will never set p ≥ pI : given that z I > z R implies that pR < pI ,
we know that the benefits of disclosure are zero beyond this point: not only has the planner averted a system-wide
run with certainty, but it has also unfreezed the market. Disclosing beyond this point only causes costly runs, and
is therefore not optimal. The generic first-order condition is
dθI (p)
1 p ≤ pI π θI (p) −
θI (p) (qV − k)
dp
dθR (p) R
+1 p ≤ pR π θR (p) −
θ (p) δAg + 1 − θR (p) (1 − p) δAb + qV − k
dp
ˆ θ̄
(1 − θ) δAb + qV − k dΠ (θ)
−
max[θ R (p),θ]
where the first line is the marginal benefit of reducing adverse selection, and positive for p ≤ pI , the second line is
the marginal benefit of reducing system-wide runs, and positive for p ≤ pR . The final term is the marginal cost of
disclosure: the cost of creating runs on bad banks. Note that for p ∈ pR , pI , both the welfare function and the
first-order condition collapse to the case analyzed in the main text, and the same results apply locally.
1.
C.4
Fiscal Policy
The analysis of fiscal policy is undertaken taking (p, θ) as given. We first look at fiscal policy separately, and then
jointly.
C.4.1
Credit Guarantees
Credit guarantees are now offered only to the good pool, since the bad pool consists only of bad banks. This means
that depositors/lenders know that if a bank in the bad pool survives, then it invests with certainty (it can only
survive with deposit guarantees - more coming next). As before, the government chooses to support a mass equal
toα banks in the good pool. As before, the cost per bank supported in the good pool is given by
M Cα = k − qV [z + q (1 − z)]
We look at fiscal policy in three different situations
1. θ ≤ θR (p), in which case the good pool suffers a run, and no credit guarantees are ever offered. Thus α = 0.
2. θ ∈ θR (p) , θI (p) . In this case, the good pool suffers from adverse selection. Welfare is given by
g0 (1 − δ)Ab + (g1 − α) zAg + (1 − z) Ab + qV − k + α zAg + (1 − z) Ab + qV − k − γΨ2
49
where
Ψ = αM Cα
Define
M Bα ≡ z (qV − k)
and the FOC simply implies
M Bα
α = max 0, min g1 ,
2γM Cα2
note that both marginal benefit and marginal cost are functions of (p, θ) through z.
3. θ ≥ θI (p), in which case the bad pool suffers a run and the good pool is free from adverse selection, so α = 0.
C.4.2
Deposit Insurance
Deposit guarantees can be offered to either pool, since the bad pool always suffers a run, and the good pool may
or may not suffer one. As before, let βi denote the mass of banks supported in pool i = 0, 1. We have that
M C0
≡
(1 − q) D − Ab
M C1
≡
(1 − q) D − Ab (1 − z)
So that it is cheaper to provide deposit guarantees to the good pool (since there are less bad banks in that pool).
1. If θ ≤ θR (p), both pools suffer a run, and the government may activate deposit guarantees for both of them.
Welfare is then
(g0 − β0 ) (1−δ)Ab +β0 Ab + qV − k +(g1 − β1 ) (1−δ) zAg + (1 − z) Ab +β1 zAg + (1 − z) Ab + qV − k −γΨ2
where
Ψ = β0 M C 0 + β1 M C 1
Let
M B0
M B1
≡ δAb + qV − k
≡ (1 − z) δAb + qV − k + zδAg
50
then, the FOC are
β0 : M B0 − 2γΨM C0
≤ 0
β1 : M B1 − 2γΨM C1
≤ 0
Note that we have that
M B1
M B0
≤
⇔ 0 ≤ zδAg
M C0
M C1
meaning that the government always chooses to exhaust support to the good pool before supporting the bad
pool. The optimal policy is then as follows: set
M B1
β1 = max 0, min g1 ,
2γM C12
If β1 < g1 , set β0 = 0. Otherwise, set
M B0
M C1
β0 = max 0, min g0 ,
−
g1
2
2γM C0
M C0
2. If θ ≥ θR (p), support is extended to the bad pool only. In this case, welfare is
(g0 − β0 ) (1 − δ)Ab + β0 Ab + qV − k + g1 zAg + (1 − z) Ab + qV − k + 1 θ ≥ θI (p) z (qV − k) − γΨ2
where
Ψ = β0 M C 0
Implying that the optimal policy follows
M B0
β0 = max 0, min g0 ,
2γM C02
C.4.3
Both Policies
We now combine the two policies, and allow the government to offer credit and deposit guarantees at the same
time. We consider the three different cases
1. If θ ≥ θI (p), the government sets α = β1 = 0, and β0 is set as before.
2. If θ ∈ θR (p) , θI (p) , the government sets β1 = 0. The government now has to jointly set α, β0 . Welfare is
given by
(g0 − β0 ) (1−δ)Ab +β0 Ab + qV − k +(g1 − α) zAg + (1 − z) Ab + qV − k +α zAg + (1 − z) Ab + qV − k −γΨ2
51
where
Ψ = β0 M C0 + αM Cα
The FOC, as before, is of the form
M B0
− 2γΨ
M C0
M Bα
− 2γΨ
α:
M Cα
β0 :
≤ 0
≤ 0
So that the government fully exhausts the policy with the greatest marginal benefit-to-cost ratio before setting
the other. The planner chooses to set the credit guarantee first if and only if
z≥
b
δA + qV − k k − q 2 V
=
(1 − q) [(qV − k) (D − Ab ) + qV [δAb + qV − k]]
1+
zI
M C0 qV −k
M B0 q(1−q)V
Or, if z is high enough; note that M B0 , M C0 are independent of z, and hence of (p, θ), thus this restriction
is purely parametric. In this case, we have that the optimal policy follows
M Bα
α = max 0, min g1 ,
2γM Cα2
and β0 = 0 if α < g1 . Otherwise,
M B0
M Cα
β0 = max 0, min g0 ,
−
g
1
2γM C02
M C0
If the condition is not satisfied, β0 is set first.
3. If θ ≤ θR (p), the analysis is more complex as then the government has to compare the cost-benefit ratios of
setting β0 , β1 , α as all three policies are potentially active. Welfare is then
(g0 − β0 ) (1−δ)Ab +β0 Ab + qV − k +(g1 − β1 ) (1−δ) zAg + (1 − z) Ab +(β1 − α) zAg + (1 − z) Ab + qV − k +α zAg
where
Ψ = αM Cα + β0 M C0 + β1 M C1
Bi
Note that the problem is slightly more complex: while the planner still chooses the policy such that M
M Ci ≥
n
o
MB
maxj∈P M Cjj , it faces the constraint that α ≤ β1 . That is, credit guarantees can only be offered to the
good pool if deposit guarantees are offered to prevent a run in the first place. We must therefore consider all
possible cases separately. Note that β1 always dominates β0 , as we have showed above
52
(a) Consider first the case in which β1 is the preferred policy. Then
M B1
β1 = max 0, min g1 ,
2γM C12
and the other policies are only set if β1 = g1 . In that case, the planner proceeds to compare α, β0 ,
following the previous decision rule. The sufficient condition for β1 to be preferred over α is a quadratic
on z.
(b) Consider now the case in which α is the preferred policy. Then, the planner will set β1 = α, since we
must have that α ≤ β1 . In this case, the optimal policy satisfies
α = max 0, min g1 ,
M Bα
2γM Cα (M Cα + M C1 )
and β1 = α. If α < g1 , then β0 = 0. Otherwise,
M C0
(M Cα + M C1 )
β0 = max 0, min g0 ,
−
g1
2γM C02
M C1
53
References
Akerlof, G. A. (1970). The market for ‘lemons’: Quality uncertainty and the market mechanisms. Quarterly Journal
of Economics 84, 488–500.
Allen, F. and D. Gale (2000). Financial contagion. Journal of Political Economy 108 (1), 1–33.
Alvarez, F. and G. Barlevy (2014). Mandatory disclosure and financial contagion. Working Paper 2014-04, Federal
Reserve Bank of Chicago.
Bond, P., I. Goldstein, and E. S. Prescott (2010). Market-based corrective actions. Review of Financial Studies 23,
781–820.
Bouvard, M., P. Chaigneau, and A. de Motta (Forthcoming). Transparency in the financial system: Rollover risk
and crises. Journal of Finance (1206).
Carlsson, H. and E. van Damme (1993). Global games and equilibrium selection. Econometrica 61 (5), 989–1018.
Corbett, J. and J. Mitchell (2000). Banking crises and bank rescues: The effect of reputation. Journal of Money,
Credit, and Banking 32, 3(2), 474–512.
Diamond, D. W. (2001). Should japanese banks be recapitalized? Monetary and Economic Studies, 1–20.
Diamond, D. W. and P. H. Dybvig (1983). Bank runs, deposit insurance, and liquidity. Journal of Political
Economy 91, 401–419.
Diamond, D. W. and R. G. Rajan (2005). Liquidity shortages and banking crises. Journal of Finance 60 (2),
615–647.
Diamond, D. W. and R. G. Rajan (2012). Fear of fire sales and the credit freeze. Quarterly Journal of Economics.
Farhi, E. and J. Tirole (2012, February). Collective Moral Hazard, Maturity Mismatch, and Systemic Bailouts.
American Economic Review 102 (1), 60–93.
Goldstein, I. and Y. Leitner (2013). Stress tests and information disclosure. Working Papers 13-26, Federal Reserve
Bank of Philadelphia.
Goldstein, I. and H. Sapra (2014, March). Should Banks’ Stress Test Results be Disclosed? An Analysis of the
Costs and Benefits. Foundations and Trends(R) in Finance 8 (1), 1–54.
Gorton, G. (1985). Bank suspension of convertibility. Journal of Monetary Economics 15 (2), 177 – 193.
Gorton, G. (2012). Misunderstanding Financial Crises: Why We Don’t See Them Coming. Oxford University
Press, Oxford, UK.
54
Gorton, G. and L. Huang (2004, June). Liquidity, efficiency, and bank bailouts. American Economic Review 94 (3),
455–483.
Gorton, G. and A. Metrick (2012). Securitized banking and the run on repo. Journal of Financial Economics 104 (3),
425–451.
Gorton, G. and G. Ordoñez (2014, February). Collateral crises. American Economic Review 104 (2), 343–378.
He, Z. and W. Xiong (2012, 04). Rollover Risk and Credit Risk. Journal of Finance 67 (2), 391–430.
Hirshleifer, J. (1971). The private and social value of information and the reward to inventive activity. American
Economic Review 61 (4), pp. 561–574.
Kamenica, E. and M. Gentzkow (2011). Bayesian persuasion. American Economic Review 101 (6), 2590–2615.
Landier, A. and K. Ueda (2009, June). The Economics of Bank Restructuring; Understanding the Options. IMF
Staff Position Notes 2009/12, International Monetary Fund.
Mitchell, J. (2001). Bad debts and the cleaning of banks’ balance sheets: An application to transition economies.
Journal of Financial Intermediation 10, 1–27.
Morris, S. and H. S. Shin (2000). Rethinking multiple equilibria in macroeconomic modeling. In B. S. Bernanke
and K. Rogoff (Eds.), NBER Macroeconomic Annual Macroeconomic Annual, Volume 15, pp. 139–161.
Myers, S. C. and N. S. Majluf (1984). Corporate financing and investment decisions when firms have information
that investors do not have. Journal of Financial Economics 13, 187–221.
Nachman, D. and T. Noe (1994). Optimal design of securities under asymmetric information. Review of Financial
Studies 7, 1–44.
Ong, L. L. and C. Pazarbasioglu (2014, February). Credibility and Crisis Stress Testing. International Journal of
Financial Studies 2 (1), 15–81.
Parlatore, C. (2013). Transparency and bank runs. New York University Stern School of Business.
Philippon, T. and P. Schnabl (2013, 02). Efficient Recapitalization. Journal of Finance 68 (1), 1–42.
Philippon, T. and V. Skreta (2012). Optimal interventions in markets with adverse selection. American Economic
Review 102 (1), 1–28.
Shapiro, J. and D. Skeie (2013, August). Information Management in Banking Crises. (9612).
Spence, A. M. (1974). Market Signalling. Cambridge, Mass: Harvard University Press.
55
Stiglitz, J. E. and A. Weiss (1981). Credit rationing in markets with imperfect information. American Economic
Review 71 (3), 393–410.
Tirole, J. (2012, February). Overcoming Adverse Selection: How Public Intervention Can Restore Market Functioning. American Economic Review 102 (1), 29–59.
Uhlig, H. (2010). A model of a systemic bank run. Journal of Monetary Economics 57, 78–96.
Véron, N. (2012, August). The challenges of Europe’s fourfold union.
56