Wichita State University Libraries SOAR: Shocker Open Access Repository
advertisement

Wichita State University Libraries
SOAR: Shocker Open Access Repository
Wind Energy Reports, no.10
Center for Energy Studies
Feasibility Study of Aileron and Spoiler Control Systems for Large
Horizontal Axis Wind Turbines
W.H. Wentz Jr., Melvin H. Snyder and J.T. Calhoun
Wichita State University
Recommended citation
W.H. Wentz Jr., Melvin H. Snyder, J.T. Calhoun. Feasibility Study of Aileron and Spoiler Control Systems
for Large Horizontal Axis Wind Turbines. Wichita, Kan: Wichita State University, 1979. -- 84 p.
Digitized by University Libraries and posted in Shocker Open Access Repository
Citable Link: http://soar.wichita.edu/dspace/handle/10057/6041
Terms of use: in the Public Domain
WER-10
l~;
nd Energy Report No. 10
FEASIBILITY STUDY OF AILERON AND SPOILER CONTROL
SYSTEMS FOR LARGE HORIZONTAL AXIS WIND TURBINES
by
W. H. Wentz. Jr .• and ro1.H. Snyder
Wichita State University
and
J.T. Calhoun
Consultant
Report of research conducted under NASA
Lewis Research Center grant NSG-3277
NASA Technical Monitor:
T. Richards
Wind Energy Laboratory
Wichita State University
Wichita, Kansas 67208
November. 1979
SUMMARY
Studies have been conducted to determine the feasibility of using aileron
or spoi ler controls as alternates to pitch control for large horizontal axis
wind turbines.
The NASA MDO-O machine was used as the basis for this study.
Results of the study show that either ailerons or spoilers can provide the
control necessary to limit turbine power in high wind conditions.
An aileron
system ;s recommended for the present app l ication, based upon the ability of
ailerons to provide self- starting and added power at low wind speed conditions.
The preliminary design study includes aileron component sizing and maximum
hinge moments . . It is recommended that ailerons be fabricated for testing on
the MOO-O turbine .
It is also recommended that theoretical modeling methods
for wind turbine performance be refined, and that wind tunnel tests be comducted to provide better data for airfoil characteristics at extreme angles
of attack with aileron- type controls.
CONTENTS
page
SUMMARY______________________________ ___ _________________ ______ ______ __
INTRODUCTION_ __________ ______ _________________ _____ ________ ____________
SYMBOLS___ ___________ __ ______________________ _________ _________________
COMPUTER MODELING___ _____________________________________________ ____ __
1
2
3
Bas i c Progr am , IIPROP" ______________________________ ___ ._. __________
3
Airfoil Characteristics Subroutine , "NACA XXII ______________________
6
7
Incrementa 1 Subrout; ne . "INCREM"__ ______________ ____________ __ ___ __
i
Post- Stall Behavior of Airfoil with Control Surface_________ ____ ___
Expanded Output Modifications__________________________ ___ _________
Convergence Problems and Re l ated Modifications_____________________
9
10
Hinge Noment_________ __ _____________________________ _____ __________
CONTROL SYSTEM OPTIONS STUDIES_ ________________ _____ _____ ______________
11
12
Control Surface Design Considerations___ _____ ______________________
12
8
Ailerons___________________________________________________________ 12
Spoiler Type_____ ________________________ ___ _______________________ 13
Spoiler Hingeline Location______________________________ ______ _____ 13
PRELIMINARY PERFORMANCE CONS IOERATIONS_________________________________ 14
leading- Edge Suction Studies ________ __ _____________________________ 14
Single Point Performance Ana lysi s __________________________________ 16
Overspeed Control_ __ ___ _____________________ ___ ______ ____ ___ _______ 18
COMPUTER STUDIES OF AILERON AND SPOILER CONTROL________________________ 20
Power Modulation at High Wind Speeds__ _______________________ ______ 20
Overspeed Contro'_ _________________________________________________ 21
Aerodynamic Starting_______________________________________________ 22
Power Increase at low Wind Speeds_ _________________________________ 23
CONTROL SYSTEM HARDWARE ____________________________________________ ____ 24
CONCLUSIONS__ _______ ______________________________ __ __________ ___ ______ 25
RECOMMENDATIONS ______ ____ _______________________ __ _________ ____________ 25
REFERENCES __ ________ ________ _____________________________________ ____ __ 26
FIGURES___ ______ _____________________ ____ ______ ________________________ 27
APPENDICES
;;
INTRODUCTION
Current large scale horizontal-axis wind turbines utilize variable pitch
of all or a portion of blade span for starting. stopping. and modulation of speed.
However. design of variable- pitch turbine blades of large size poses several
structural and mechanical problems .
Fixed-pitch rotors for large wind turbines
offer advantages over variable pitch rotors or tip-controlled rotors.
The
blades of the fixed-pitch rotor are oriented so that the fatigue- producing
cyclic gravity loads are in the direction of the greatest dimension (the section
chordwise direction).
This mini mi zing of cyclic stresses results in weight and
cost savings . A fixed-pitch rotor does not require blade pitch bearings or the
complex bearing assemblies and linkages needed for pitch control and fUI"ther
stress reduction results from combining a teetering hub with fixed pitch rotor.
These factors contribute to significant cost savings of fixed-pitch rotors over
variable- pitch rotors.
The fixed - pitch rotor , however, has two inherent problems:
(1) start- up
initiation and shutdown control, and (2) prevention of overspeed . Setting fixedpitch blades at an ang le to maximize annual energy may result in near-zero
starting torques when the rotor axis is aligned with the wind, s ince the blades
are completely stalled.
It has been demonstrated that yaw control may be used
for start up of fixed - pitch wind turbines.
enough to prevent overspeed.
However, yaw control is not fast
Yaw systems operate slowly; as much as one minute
may be required to yaw sufficient ly to prevent overspeed . Typical overs peed
rates are so high that the rotor speed can double in half that time.
Although yaw control might be used to provide starting and to shut down at
low wind speeds, other means are required for overspeed control.
One possible
concept is the use of retractable spoilers on the outboard portion of the
blades to reduce rotor speed by decreasing section lift and by increasing drag .
An alternative concept is the use of hinged trailing-edge surfaces (ailerons)
which can act similarly to spoilers in preventing overspeed. and can also act
to improve rotor torque at less - than- design wind speeds. thus improving annual
energy output.
Spoiler and aileron control systems have been studied under a 6-month
grant from NASA Lewis Research Center . This report presents results of these
studies which include aerodynamic performance of aileron and spoiler controls
and their effects on turbine performance, selection of a control system si zed
for the NASA MOO- O 38.1 m diameter wind turbine, and preliminary design of
mechanical systems for control surface actuation and fail - safe operation.
SYMBOLS
a
ax ial induced velocity factor
a'
rotational induced vel ocity factor
B
number of blades
c
airfoil or blade local section chord
ca
aileron chord
Cs
spoiler chord
Cs
ai rfoil cho rdwise f orce coefficient .
ci
airfoil lift coefficient
Ch
hinge moment coefficient
cn
normal force coefficient
Cx
coefficient of force component in plane of rotation
2
cy
R
coefficient of force component in axial direction
r
local blade radius
cp
rotor power coefficient, power/~V3nR2
V
wind velocity
x
spanwise distance from center of rotor
X
tip speed ratio, wR/Vwind
a
angle of attack
o
deflection angle
,
relative wind angle
a
blade pitch angle
w
rotor angular velocity
maximum blade radius
COMPUTER MODELING
Basic Program, "PROP"
The computer program used in the studies conducted under this NASA grant
is PROP.
This program was originally written by Stel Walker and Robert Wilson
at Oregon State University for NASA (Ref. 1).
Prior to being supplied to Wichita
State University. some modifications were made to the program at lewis Research
Center to facilitate its use on the NASA computing system.
After the program was received at WSU. it was modified to permit operation
on the university IBN system 370 computer.
The program consists of a main
program and six subroutines:
Main Program:
3
PROP
Subroutines:
SEARCH
CAlCZ
TlPlOS
NACAXX
INCREM
BESSEL
The main program receives input information about rotor geometry, control
mode (tip section pitch, spoilers, or ailerons), and operation (varying rpm or
wind speed) through a series of data cards.
For the analysis reported here,
the following input items were considered constant and were not varied :
B= 2
BO
=
(number of blades)
.97
(NASA tip loss model)
XETA
=
HB
2 ft
=
0.167
(velocity power law exponent)
(hub radius)
R = 62.5 ft
(turbine radi us)
THETP
=
(pitch angle)
THETl
= 0
0 de9
deg
(twist angle at all inboard stations)
H = 100 ft
(hub altitude)
=0
(coning angle)
SI
deg
Blade planform geometry used in all calculations corresponds to the wooden
inboard blade (shown in figure 1) .
30%of radius.
The length of the spoilers and ailerons is
This geometry was entered by means of data cards.
Input data which were varied during this study included:
v
freestream wind velocity
OMEGA
angular velocity of turbine rotor
MCON
method of control (tip section pitch, spoilers,
or ailerons)
TlPICH
angle of pitch of tip section
4
AILDEF
angle of deflection of ailerons
SPDEFL
angle of deflection of spoilers
The program permits use of va ri ous sizes of radial increments in the calculation of performance.
Early in the analysis studies. comparison was made
of results of computation using radial steps ranging from 10% to 2%.
To minimize
error, 2% increments were used in all subsequent calculations.
In operation, the computer program starts at the outboard end of the
blades and calculates components of forces for each incremental radial blade
element, working inboard to the hUb .
local chords and amount of twist are determined by the subroutine SEARCH
using linear interpolation.
Subroutine CALC ;s then called to calculate the
axial and rotational interference factors (a and a'), the local angle of attack
and lift and drag coefficients .
section is shown in figure 2.
The relative wind relationship to the blade
The relationships between angle of attack and
lift and drag coefficients are obtained from subroutine NACAXX and modified
by subroutines TIPLOS (tip and hub losses) and INCREM (increments of c, and
cd due to aileron or spoiler deployment).
As can be seen in figure 2, angle of attack is a function of a, and a is
a function of the section lift.
Thus, evaluation of a is an iterative process
which is discussed in detail in a later section of this report .
ference (a 1 ) was assumed zero for all the present studies.
Radial inter-
Elements of force
in the plane of rotation (producing torque) and normal to the rotor plane (producing thrust) are thus determined by iteration at both ends and at the center
of each 2% span blade section.
The forces are integrated across the section using
Simpson's rule and then simply summed to give total quantities for the blades .
5
Airfoil Characteristics Subroutine, "NACAXX"
Airfoil aerodynamic characteristics used in the PROP computer code are
made available to the computer in the form of subroutine NACAXX.
This technique
permits the program user to develop the aerodynamic information in a form most
suited to his own needs, or most compatible with available data . The task of
the subroutine is to determine lift and drag coefficients for a given angle
of attack, and to return these coefficients to the main program.
In subroutine
NACAXX used for the present performance studies of the NASA MOD-O wind turbine,
the aerodynamic characteristics of the NACA 23024 airfoil are stored as a set
of algebraic equations, with logic to branch to the equation appropriate for a
particular angle of attack range.
The angle of attack at a given station is
calculated from wind speed, angular speed, radius, and induced factor, a.
In order to analyze an airfoil with a control surface. it is necessary
to identify geometric characteristics of the control surface, such as control
surface chord and deflection, as well as airfoil angle of attack.
In addition.
it is desirable to store information concerning control surface hinge moments
so that control surface actuation loads may be calculated.
In the present
research, it was decided that control surface data should be treated as increments to be applied to the basic airfoil characteristics.
for adopting this procedure:
There were two reasons
first, no data were available for the NACA 23024
section with spoilers and ailerons; and second. a control surface incremental
subroutine would have application to a variety of airfoils with minimal change.
A description of the incremental routine for aileron and spoiler controls ;s
given in the section which follows.
6
Incremental Subroutine. "INCREW
This subroutine receives control surface type. control surface chord, and
deflection angle as input information.
Output information is incremental lift
coefficient. incremental drag coefficient. and control surface hinge moment
coefficient.
The incremental data are added to the basic airfoil coefficients.
so that net or total coefficients are returned to the main program for evaluating blade element performance.
The incremental data used in this subroutine were obtained from wind
tunnel experiments conducted on a 21 % thick airfoil at WSU, specifically the
lS(l )-0421 airfoil as documented in reference 2.
Figures 3 and 4 show
incremental data from the reference for lift and drag coefficients, and control surface hinge moment data as a function of control surface deflection and
angle of attack.
Equations used to model the control surface data are
given in Appendix A.
Both the experimental data and the forms selected
for representing the data reflect the fact that spoilers and ailerons
are quite similar with respect to aerodynamic characteristics which
they produce.
It should be remarked that while the incremental subroutine has been arranged
so that control surface chord is an input variable, the data were obtained from
experiments with 20% chord aileron and 10% chord spoiler.
The resulting equa-
tions would be applicable to control surfaces with chord lengths differing by
as much as 50% from the source data values, but could lead to serious errors for
larger chord differences.
Furthermore. the spoiler data were from experiments with a spoiler hingeline location of 70% chord.
While using the present data base to approximate
7
spoiler characteristics for hingelines from 60% to 90% chord would probably
not results in large errors, hingeline locations forward of 50% would be expected to produce large errors, since it is known that spoilers are much more
effective at forward locations.
In order to determine the overall hinge moment required to actuate a
control surface, it is necessary to integrate the local section hinge moments
across the span of the control.
This integration is accomplished in program
subroutine CALC, in parallel with integrations of other spanwise integrations
of blade torque and thrust loads.
Post-Stall Behavior of Airfoil with Control Surface
Post - stall characteristics of airfoils have been investigated for only
a few section shapes.
This lack of data is unfortunate, since fixed pitch
wind turbines operate over an ang l e of attack range from approximately 0° to
90°.
The aerodynamic characteristics of the NACA 23024 airfoil as modeled
in subroutine NACAXX for angles of attack beyond stall were based upon wind
tunnel tests of the symmetric 12% thick NACA 0012 section.
For post-stall
angles of attack with spoiler, it is assumed that the spoiler effectiveness
vanishes and that the basic section data apply.
This assumption is believed
to be reasonable since for high angles of attack, the airfoil will separate in
front of the spOiler, rendering it nearly ineffective.
For an airfoil with aileron deflected, on the other hand. the lower surface
shape is changed and the lift and drag will be different , even for 90° angle
of attack.
Since no experimental data for airfoils with ailerons at extreme
angles of attack are available, a model was developed for the present study
based upon theoretical results from potential flow analysis of flat plates using
8
free streamline techniques.
Appendix A shows theoretical results for
Kirchoff flow, modified by cor recti ng to a more realistic base pressure.
This modified theory is then used t o develop aileron loads for post -stall
cases.
Expa nded Output Modifications
In order to facilitate analysis of effects of spoi l er or ailero n deflections on wind turbine performance. the output of t he comp uter program was
expanded.
The computer program output was modified to provide two alternative types
of display of the performance resul ts . The "long pri nt-out" shows loca l values
of velocity. angle of pitch. angle of attack. coefficients of lift and drag. and
the resulting local contributions to torque. thrust. and a.
Integ rated results
are also printed including torque, thrust, power, cpo average a, and hinge moment.
The "short print-out" displays only the integrated values .
Examples of both
the "short print-out" and the "long print-out" are shown in fig ure 5.
The reason for the long print-out is that it permi ts an investigator to
examine local wind angles and angles of attack across the radius from hub to tip,
the resu l ting blade loading and induced effects.
An additional optional print-out was added to the program during the
present research.
At each radial station, the computer seeks to satisfy con -
tinuity and momentum relationships by an iterative procedur e involving a , the
induced velocity factor, net angle of attack on the blade section. and the
resulting section lift and drag coefficients.
In order to examine this iterative
process, an optional command causes the printer to list each suc cess i ve estimate
of local a , c t
'
cd' and the factor a.
If a does not converge i n the 50 itera -
tions a wa rn ing is printed on the output sheet.
9
Convergence Problems and Related
~lodif;cations
As outlined above , estimation of the axial interference factor, a, is
an iterative process involving the following steps:
1.
Assume initial values of a = 0 , a'
=
O.
r
(1)
a:. -
3.
Calculate
4.
Calculate Ct and cd as functions of a, including any increments
due to spoiler or aileron deflection.
5.
Calcu late cy = CtCOS$ + Cdsin$
and
e
Cx
(2)
= Ct sin $
cd cos $
(3 )
(4)
Be
6.
7.
Calculate
1rr Cy
a: --""'--'",,-8sin2$ +BC
Cy
,r
Be
;r
Cx
Calculate a': ---'"'---"----
(5)
(6 )
8 sin $ cos $
8.
Compare a or a ' to previous values to check for convergence.
If not converged, return to step 2 and repeat.
This process had been programmed in subroutine CALC to perform the iteration
up to 40 times with damping applied on the fourth, tenth, and fifteenth cycles .
It was found that at tip speed ratios, X, of more than 15, the average values
of a were predicted to be greater than 0. 5 for the straight blade at zero pitch
angle.
For bl ades with negative or positive loading outboard--as \'Jith tip
pitched, ailerons deflected, or spoilers deployed-- high values of a were obtained
10
at lower values of X, with local values of a = 1.0 (or greater) being obtained .
these unrealistic values were usually obtained at low wind speeds out-
t~hile
side the normal operating range of the rotors, it was felt that they cast doubt
on all performance predi ctions.
In order to i mprove calculation of a, the possible number of iterations
was increased to 50, damping was applied to each cycle, and local values of a
were limited to
-0.5~a!:0.5.
Also, an optional procedure was made available
which disregarded the induced velocity by setting a = O.
Figure 6 compares the
results of calculations with (1) a unlimited, (2) - O.S sasO.S, and (3) . . 0.
The remaining performance pred ictions were calculated with the restriction
that -O.S sasO . S.
Hi nge Moment
Hinge moments for the spoiler studies were obtained directly from the
wind tunnel data of reference 2.
For the aileron studies, however, hinge moment
data from this reference are not di r ectly applicable, because of the large djfference in airfoil camber between the two sections, especially near the trail ing edge.
The equation for hinge moment coefficient is given by:
(7)
where:
ch
= hinge moment coeffici ent
cho
= hinge moment coefficient at a = 0° and 6 = 0° (a function of camber)
= rate
of change of hinge moment with alpha, obtained from the
data of reference 2.
= rate
of change of hinge moment with aileron deflection,
from reference 2.
11
Since the value of Cho depends on camber of the section. and no experimental
data were available for the NACA 23024 section. a value for this parameter was
obtained by integration of the pressure distribution over the airfoil trailing
edge region using theoretical data from reference 3.
A listing of the computer program with all the modifications described
above is given in Appendix B.
CONTROL SYSTEM OPTIONS STUOIED
Control Surface Design Considerations
Geometric variables available to the designer for the present study are:
control surface type {aileron or spoiler}. spanwise extent of control surface.
control surface chord. and for the case of the spoiler. hingeline location.
Most of the torque produced by a propeller-type wind turbine is produced from
the outer portion of the blade.
For this reason, torque modulation devices
should be located on the this portion of the blade.
pitch control over the outer 35% of the blade.
The MOD-O turbine uses
Control surface span for aileron
and spoilers studies was selected as the outer 30%.
Ailerons
Ailerons have several characteristics which make them attractive as
candidates for wind turbine aerodynamic control.
First. they produce nearly
the same aerodynamic effects as spoilers of the same chord and deflection angle.
Second, ailerons have the capability of providing positive as well as negative
increments in lift.
Furthermore, downward deflection of ailerons will increase
maximum lift coefficient.
The ability to increase lift at low wind speed con-
ditions is attractive. since increased lift can be expected to result in increases in torque and hence power production.
12
Spoiler Type
Plate and plug type spoilers have both been successfully employed on
aircraft (see sketch below).
c
c
Plug-Type Spoiler
Plate-Type Spoiler
Sketch A - Spoiler Types
The two types are essentially equal in terms of lift and drag increments
produced for a given projection height.
The plug type have low actuation loads,
but reduce torsional stiffness and strength of the airfoil more than the pl «te
type.
The plate type also causes less penalty if mis -rigged, and they have
hinge moments which" tend to close them.
Based upon these considerations, plate
type spoilers were selected for the present application.
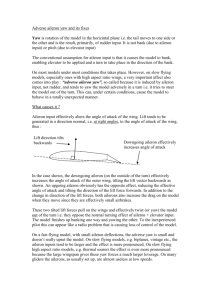
SpOiler Hingeline Location
Experiments have shown that spoiler effectiveness increases as the location of the spoilers is moved forward (ref. 4).
Unfortunately , forward spoiler
locations results in a time lag between actuation and change in lift.
Fpr this
reason, forward spoiler locations have rarely been selected for airplane con trol systems.
In the case of the wind turbine , the time response requirements
are not so severe.
In aircraft, control response must occur within the time
required to travel a few chord lengths.
13
low solidity wind t urbines such as
the MOO-O machine have blade tips I'lhich travel a large number of chord lengths
per revolution (more than 100 chord lengths at mid-control position). and control response within one revolution is considered quite satisfactory.
A second
consideration for spoiler location is the effect on the structure of cutting
into the airfoil, and a th ird consideration affecting the choice of spo iler
type and location is the effect of "mis-trilTllled" or "mis-rigged" spoilers on
drag at conditions for which spoiler deflection should be zero.
In addition,
any gap or protuberance associated with the spoiler or actuating mechanism
will add to the basic section drag, and the penalty associated with drag of
this type is much more severe for forward locations than for aft positions .
It is a cardinal rule of airfoil design that leading edges should be kept as
smooth and uncluttered as possible.
Based upon these considerations, the pre-
sent design studies were conducted for spoilers with hingeline locations aft
of 50% chord.
Because of the availability of data for spoilers with a 70%
hingeline, that location was selected .
PRELIMINARY PERFORMANCE CONSIDERATIONS
Leading-Edge Suction Studies
Traditionally, aerodynamic characteristics of airfoil sections are studied
in terms of lift and drag coefficient components of the resultant force.
Another
set of components which are sometimes used are normal and chordwise force coefficients.
For a wind turbine blade element with zero twist and zero pitch.
only the chordwise force produces torque .
It is. therefore, instructive to
study the airfoil characteristics in terms of this torque producing component,
called "leading edge suction."
The relationships between cl_ cd' and the chord-
wise and normal coefficients are:
14
cd*cOs (a)
(8 )
c n = cl * cos {a} + cd * sin(a )
(9)
Cs = cl*sin (a}
where:
Cs
cn
~
suction force coefficient. positive forwa rd
= normal force coefficient, positive upward
Figure 7 shows the cf., cd and Cs as functions of angle of attack for the
NACA 23024 airfoil with 20% aileron. A theoretical relationship between Cs and
angle can be derived for a symmetrical section from this airfoil theory, as
follows:
C1
= 2.sin(a)
,
(10)
Substituting these values relationships into equation (8) above, the following result is obtai ned:
( 11 )
In real flow, drag is present, and at zero angle of attack Cs is equal to -cd'
At angles of attack near stall. the suction decreases abruptly. and again
becomes negative .
Thus the useful angle of attack range for developing posi-
tive power is from the angle at which enough "theoretical" suction is developed
to overcome the basic section drag , up to the angle of attack at which stalling
occurs .
For the NACA 23024 airfoil the range of angles for positive suction is
between 2° and 17°.
A second region of positive suction appea rs at about 60°
and remains up to 90°.
15
The relationship between wind speed, rpm, and blade angle is s hown in
figure 2.
When the turbine axis is aligned with the wind, the angle of
attack on the blade will range from 90 0 at zero rpm to 00 at infinite rpm.
For an untwisted blade element at zero pitch angle, the angle of attack
will be equal to the
angle ~ .
For low lift coefficients and low blade
solidity, the induced velocity factors a and a' will be small .
It is
useful to assume the limiting use of zero induced effects to study trends.
Setting a = a':: 0,
tan(o) = tan(.) =
(12 )
Single Point Performance Analysis
Selecting the 75% radius station as a representative station for blade
element analysis, this gives:
Vwind
tan a = w(.75R}
Rearrange:
w =
Vwind
.75R (tan(o})
( 13)
(14 )
Using this relationship, and a specified wind speed , the rpm can be calculated
corresponding to a given angle of attack .
From the cs curve for the NASA
23024 airfoil, it ;s seen that zero torque (zero cs) will occur at several
angles.
For a wind speed of 54 m/s (120 mps), equilibrium rpm values are cal-
culated as shovm
ir.
Table 1:
16
Equilibrium States at Zero Torque
Table 1
ALPHA
VW1. nd
RPM
2°
54 m/s (120 mph)
1029
1]0
54 m/s (120 mph)
116
60°
54 m/s (120 mph)
21
Th i s study shows that the highest rpm corresponds to the lowest angle of
attack.
The question of which of the possible equilibrium states wi l l really
exist is answered by considerations of stability .
plot, and realizing that torque increases as
Examining the Cs versus
s increases, and that rpm decreases as a increases, the question of stability ;s easily understood.
C
Sketch B shows these characteristics:
I
Torque
V wind = Constant
t
Cs
+
0°
2°
60°
17°
90°
a -
-
Sketch B - Stability
17
rpm
Q
Since an increase in rpm from point 1 will result in negative torque,
and a decrease in rpm will result in positive torque, it is clear that this
point is in stable equilibrium.
characteristics.
Point 2, on the other hand, has the opposite
An increase in rpm from point 2 will result in an increase
in torque. accelerating the rotor toward point 1. and a decrease in rpm from
point 2 will result in negative torque, decelerating the rotor toward point 3
Thus. point 2 is unstable.
These same considerations will shows that point 3
is a second stable equilibrium point.
These arguments are easily generalized to state that equilibrium points
with positive slope on the graph illustrated will be stable, while equilibrium
points with negative slope will be unstable.
To protect the wind turbine
from overspeeding in high wind with loss of electrical load on the ge nerator.
it is necessary that either no stable equilibrium states exist, or that
the stab 1e equi1 i bri urn "runaway" rpm be low enough tha t no damage wi 11 be .
sustained. and the remaining rotor energy can be absorbed by the system mech anical brake.
The sketch shows that point 1 ;s the most dangerous equilibrium
point. since it corresponds to the highest stable equilibrium rpm.
Overs peed Control
In the event of electrical failure of a generator being powered by a
wind turbine, it is necessary to provide means for preventing overspeed or
"run- away" which would result in overstressing of the rotor structure and subsequent failure.
For large wind turbines this poses a difficult problem for
a mechanical brake design.
The preferred method ;s to use aerodynamic braking
such as pitch control or similar means.
The braking device must be capable
of functioning not only at the rated or design wind speed. but also at the
18
highest wind likely to be encountered.
For the present study a hurricane 'tli ;; d
speed of 54 mls (120 mph) was selected as the maximum wind s peed.
Combining
the requirements of a IIdouble emergency II s i tuation consisting of generator
failure along with hurricane wind results in a design requirement t o prevent
overs peed with zero torgue and wind velocity of 54 m/ s.
Figure 7 shows the relationship between c s and alpha for aileron
deflection of -60° , and spoiler deflection of 60°.
The results for
60 ~
upward deflection of either spoiler or aileron show that the region of
positi ve Cs in the low (pre-stall ) angle of attack range has been eli minated.
Thus no positive torque will be developed over this range of an gles. At
angles of attack beyond 60 0 however, positive Cs persists even with aileron
or spoiler control surface deflected upward
be developed.
60~,
and positive torque will
From the arguments given earlier, an equilibrium "run-away"
state can be expected at conditions corresponding to 60° angle of attack.
For the hurricane wind speed of 54 mis, the equilibrium rotational speed
will be about 21 rpm.
Since this rotational speed is well below the operat- ·
ing speed of 33 rpm, it does not pose a hazard in terms of centrifugal blade
loads.
Mechanical braking must be used to bring the rotor to rest.
From these preliminary studies based upon simplified analysis and hand
calculations, it is indicated that either a spoiler or an aileron system will
be adequate for providing overspeed protection to the turbine.
The next sec-
tion documents more sophisticated computer studies of turbine performance with
aileron and spoiler controls, which confirm these preliminary findings.
19
COMPUTER STUDIES OF AILERON AND SPOILER CONTROL
Power Modulation at High Wind Speeds
For wind speeds greater than the wind speed for which the electrical
generator is rated, it is necessary to either take the wind turbine off-line
or to Hdump" power by aerodynamic or other means .
With an aileron or spoiler
control system this "dumping" ;s accomplished by deflecting the control up-
ward to reduce lift and torque.
Figure 8 shows power coefficient vers us tip
speed ratio for the basic rotor, and the rotor with full up aileron, and with
full up spoi ler .
These results also show that either the aileron or spoiler
can provide the control necessary to reduce power to zero over the normal range
of tip speed ratios.
Because of the potential of the aileron to provide start-
ing torque and to provide increased power at low wind speeds, the aileron was
selected for further studies.
The data in figure 8 show that the aileron chord could be reduced considerably. perhaps as much as 50%, and still provide necessary overspeed protection.
While smaller aileron chord would reduce cost. it was decided to retain the
20% aileron chord size for two reasons.
First, if one aileron became inoperative
the rotor coul d be stopped with the remaining aileron.
Second, it is known from
experimental tests that the PROP code and similar theoretical methods underpredict maximum power by a considerable amount.
Therefore, a substantial ma rgin
must be provided in the design of a control system using these analytical
methods.
If experimental evaluation of the new control system reveals that
it is oversized. corrective action can be taken at that time .
Improved aero-
dynamic modeling for wind turbines should be developed to reduce discrepancies
20
between theory and experiment in order to reduce costs of experiments and
avoid expensive design errors.
Figure 9 shows how power modulation would be accomplished with the 20%
aileron control system for a synchronous generator operating at 33 rpm.
wind speeds lower than 8.2 mls (18 mph)
~Iith
For
zero control deflection. the power
developed is lower than the rated value of 120 kW shaft power. corresponding
to 100 kW of electrical power.
For wind speeds in excess of 8.2 mls (18 mph).
the turbine is capable of producing more power than the generator can absorb.
By deflecting the control surface upward. power can be modulated to provide
the required 120 kW at speeds up to 12.9 mls (29 mph).
For speeds greater
than this value, it will be possible to provide 120 kW by using down aileron
deflection, an option not possible with spoilers.
Thus the aileron system
can provide rated power up to 15.6 mls (35 mph).
Overs peed Control
Computer studies with full up aileron were conducted at the hurricane
wind speed (54 m/s) condition described earlier. for rotational speeds ranging
from 10 to 30 rpm.
occurs at 19 rpm.
These runs show that the zero torque "runaway condition"
This value compares very favorably with estimate of 21 rpm
from the simplified analysis given in Table 1, and confirms that the proposed
control system will provide adequate overspeed protection.
The control system must be capable of providing actuation forces sufficient
to overcome the cloSing aerodynamic hinge moment.
The critical design condi-
tion is maximum overspeed rotational speed of 40 rpm with 60° up aileron at
zero wind speed.
The hinge moment for this case is 186 N-m per aileron.
21
Aerodynamic Starting
14ind turbines with pitch control are ordinarily started by rotating
the blades to an unstalled angle, and then decreasing the pitch angle as rpm
increases.
l~ith
a fixed pitch rotor, very little starting torque is developed,
and other means for starting must be employed.
Recent tests by NASA with the MOO-O turbine have demonstrated that starting can be effected in a fixed pitch mode by yawi ng the rotor away from the
wind.
While this mode of operation is possible for a large scale machine,
it is inconvenient in that yaw rates must be low to prevent over-stressing the
rotor system.
With an aileron control system it is possible to generate starting
torque without yawing the rotor away from the wind . At zero rpm the effective
angle of attack is 90°, which means that the basic blade will be fully stalled.
and torque will be nearly zero.
torque is provided.
IHth up aileron, however, a larger starting
The computer code used for performance studies is not
capable of calculation at zero rpm, so runs were made at very low rpm values,
and the results were extrapolated to zero rpm.
This study shows that the
opti mum aileron angle for starting is _60° , and that a starting torque Qf
778 N-m (574 ft - lb) is available at a wind speed of 3.6 mls (8 mph) .
Because
of the dynamic pressure effect, this torque will be proportional to the square
of the wind speed.
Table 2 shows starting torque for several wind speeds.
Whether starting by use of ailerons can actually be effected depends
upon two factors which have not yet been determined.
of the generator and gear train must be overcome.
First, the friction
Second. once starting is
achieved. rpm must be increased to the point that the blades become unstalled
22
Table 2 - Starting Torque with 60° Up Aileron
Wi nd
Torgue
S~eed
2.2 m/s ( 5 mph)
304 N-m
3.6 m/s (8 mph)
778 N-m
4.5 m/s (10 mph)
1216 N- m
so that the operating speed of 33 rpm can be achieved.
Accelerating the rotor
to an unstal1ed state cannot be simulated with the present computer codes.
Ful'-
scale rotor tests will be required to evaluate the practicality of this starting
method.
Power Increase at Low Wind Speeds
Another interesting control option ;s possible with the aileron system.
At wind speeds lower than rated, positive aileron deflection can be utilized
to increase power available.
In order to assess the benefits of aileron deflection at speeds below
rated. it is necessary to calculate annual energy output for competitive control schemes using some mathematical model for the wind probabi lity distribution.
In the present study, a Rayleigh distribution has been used.
Table 3
shows results of a study of this type, comparing zero control with optimum
aileron deflections.
Optimum aileron deflections are 5° or lower.
Table 3 - Use Of Ailerons to Increase Annual Energy
Mean
5.36 m/s
(12 m~h)
Increase in
Annual Energy
1. 8%
23
nd Speed
5.81 m/s
l~i
( 13 mph)
6.26 m/s
(14 m~h)
1.6%
1.3%
These results show that using optimum aileron provides small gains in
annua l energy .
If the ra t ed power 'Here hi gher. or mean ','l i nd sp eeds lower .
larger i nc reases would result.
Appendi x C gives the deta il s of th i s study .
CONTROL SYSTEMS HARDWARE
The aileron system is shown in figure 10.
The control surface is' hinged
at the upper surface, providing maximum leverage for the actuatio n pushrod.
Travel limits are 60° upward and 15° downward, since maxi mum up travel is
needed t o limit rotor power i n high wind conditions.
The 15 0 down travel is
adequate for providi ng added power at low wind speed condit i ons.
A bell crank
tra nsfers spanwise motion of a pr imary push rod to chordwise motion.
The
primary push rod is actuated by a hydra ulic cylinder located in the inboard
portion of the rotor.
The counter-weight shown in the figure acts under the influence of
centrifugal force to drive the ail eron to the full up position, providing
fail -safe operation in the event Of hydr aulic system failure.
The hydraulic
cylinder works against the weight to bring the aileron to a desired setting.
The decision t o locate the hydraulic cylinder on the rotating blade was made
largely because of existing hydraulic hardware used for pitch control on t he
MOO-O machine.
In other appl i cations it would be quite feasib le to locate
the hydra ul ic cylinder within the rotor hub, and tra nsfer the needed spanwi se
actuator motion through a push rod extending to the rotor hub.
A mechanical
latch locks the ailerons in the full up position until released by restorati on
of hydraulic system pressure.
The aileron structure consists of aluminum hinge, ribs. and skin.
Tors ional
stiffness of the structu re is such that actuation loads can be i ntroduced at the
24
aileron root. eliminating the need fo r providing actuators at mid - span or other
locations.
Modifications to the forward portion of the blade are minimal, con-
sisting primaril y of cutting off the aft portion and installing a trailing spar
and the ai rcraft-type piano hinge to accommodate the aileron.
More detailed
design information is given in Appendi x D.
CONCLUS IONS
1.
Either ailerons or spoilers could be used to prevent runaway and to
modulate power at higher than rated wind speeds.
2.
An aileron system was selected as prime candidate fo r the present appli-
cation, based upon considerations of providing power output gains at low wind
speeds, and the possibility of starting without yawing the rotor away from the
wind.
3.
Preliminary loads analysiS including hinge moments have been developed
for a 20% chord. 30% span aileron control system for the MOO-O turbine.
4.
The system. as designed, provides overspeed protection at hurricane
wind speeds. low wind speed starting torque of 778 N-m at 3.6 m/ s. and 1.3 to
1.5% increase in annual energy compared to a fixed-pitch rotor.
RECOI+IENOATIONS
1.
Aileron hardware should be developed for testing the aileron control
concept on the MOO-O turbine.
2.
Theoretical models for wind turbine performance should be improved
to diminish the disparity between theoretical and experimental power values.
3.
',oIind tunnel tests should be conducted to provide a better data base
for airfoi l characteristics at high (up to 90°) angle of attack. with and
without control surface deployed.
25
REFERENCES
1.
Wilson, Robert E., and Lissamaman, Peter B.S.:
Applied Aerodynamics
of Wind Power Machines. NSF RANN. Grant no . GI-41840. May 1974.
2.
Wentz. W. H"
Jr .• and Fiscko. K.A.:
~Hnd
Tunnel Force and Pressure
Tests of a 21 %Thick General Aviation Airfoil with 20%Aileron,
25% Slotted Flap and 10% Slot-Lip Spoiler.
NASA CR 3081. 1979.
Theory of \<I;n9 Sections.
3.
Abbott, I.H., and Von Doenhoff. A.F..:
Dover Publications. 1958.
4.
Wenz;nger, C.J., and Rogalla, R.M.: Wind -Tunnel Investigation of
Spoiler Deflector. and Slot-Lip Lateral Control Devices on Wings
with Full-Span Split and Slotted Flaps.
26
NACA Rept . 706. 1940.
Note:
C/R
R=19.0Sm (62.Sft)
-'-
o
I
.192
.032
- . / Variable Pitch Control
~
~///~
1. 000
.647
x/R
Leading· Edge
. 700
I
N
"
20% Chord Aileron
10% Chord Spoiler
70% Chord Hingeline
Chord Lengths
x/R
.032
.192
.647
1.000
e}H
.0960
. 0960
.0640
.0333
Figure 1 - Blade Planform Geometry
v
--=.,.. - -- -- --- - -
•
__
•
__
0
__
•
__
•
__
(al Streamtube attenuation of axial velocity.
V(l-a)
W.r{l+a I
)
(b) Blade angles
Figure 2.
Blade Element Velocities
28
Symbol
-'.
-
. 0 351 C
• 005c Cap
:::iL.C
".
Alpha
..
_8°
"
~
0°
4°
Z
8°
I!l
_4°
- .~ .~
Note
Data from reference 2
CaT Incremental Lift
Fi g ure 3 - 20% Aileron Incremental Effects.
29
Symbol
-'.
e!
A
.'. .
X
.0050
(b) Incremental Drag
Figure 3 - Continued.
30
Alpha
-8·
-4·
O·
4'
I
:'. 'r.. '~ L_L2p,!_
\ \ '\:, . ~ 1
:
\: h..:i: :b. K.: . i
! ~': hi':"ll
•
';
-'-i ' oL
", ","""'
1',,
' i
I:
: ";
,Symbol
o
-S·
o·
o
S·
o
--"
,
oL
;
",; Gu;-::
;
'a
I 1-'
.1. ·1
·'1 T :'"
1 '++ _+++_~ , ~~~ :
:
I.
i
1
.;
I~ ~ I ~ ~ I
!
!,
'!
o
12·
~
16·
!
Ii
' ; '1
1·:
1
I
'I
"-'...~
+_+_ ,_
"'-
1 ~
l--' ~ ~
' ?-..,
d:~:++I+-ril-'+i+H-+-I~
i, I+t-I--;-
(c) Hinge l10ment
Figure 3 - Concluded.
31
~
....L
Note
Ah
Data from referen c e 2
I~-
---
- - - - -- -- - -
c
Synbol
Alpha
-So
OJ
.": ,-:;; In i: I:] il'!! !1111i1't ':
J
-,.
A
O·
"
'"
~
0
··,-·,·, :;1;,··
W
N
I
' j~' ~ ~ :",b#,f
0 ,::" ' .~j..
O~,~ ""p:
, ::: ~;
. : l~·J.~- ~· ~·'~<, ~tt+
':' ii_po' ~t~
a ~.fi*-.
0 0f"I
1' Qf-t~
~- .' . at-tt1
:!T 10
..-t '...' rm
'.'...·,,.±.b:~
, ~: "l..1·
.
, lo y " .,
r,o
it}
ct
,,·~
··· ~': :~~'~'I<;
~.
I..
~: J
, .........
m
,I,;
:,.
'I
,
'I, ,.'
I
- , ---,
6h/ e H".j ~.Lf"1"
- -r:-:
' .j,. c'
..i-LO..LC.!-.i·....1L;:Il,_L..L.
._ "_._...__,
,. L .
'1 :::r - r:-'l: .
, 111 I ' :
'H
" i' t" '1'' r 1j'''''m'' .'"
'
ht'''t1i118
'j;.':'. jtf::
!;.' ll~
-" '=
:::' '.; ..: "j. ~~ ;:: :: .;: I': ;". ',Ii;: h"~
'~:!:'
".1'''·'1..- ·t.ill.
":, ::;: ::;:, ..,,,.:,:., ~:Pl.
"'ftI;'' ::: i!·.i -- . . ." -' ,;;. :.. ""1"·1
.. ," .,... ,. "1'"
.. ,. ..-' ~
:';1." ,"..,J,.. ....
. I
:!u
~:! I! "' .,,'
., ,,,~'1..... ,. ." ".. ...... . .
':":' ill±i
"""'"
,:
.
• • . -.
,.1 •
I'
(a)
Lift
:.
L.
6h/e
I:++f:-I
I
'J- +-I..I.
. - I --Ti--T':,, : ·L:·1 - -C':
I
:t . I
(bl
Hinge Moment
Figure 4 - 10% Spo i l e r Increme nt a l Effects.
-.
H - -1-::-:- f ~'
" ,
&S
\
~
C_-__
~6S
~h \
,~'
c
Symb o l
w
w
(c) Drag
Figure 4 - Concluded.
Alpha
- S'
'•"
"..
-4'
0'
4'
Z
S'
c.. -= -• -= · -·
•
•
0
~
••
•
C
~
•
••
x.c_
•d
CO
=
-
· =,·
d
o
-.
----Z''': _
.
_
'"
N
o
• • • •
,,
,
0'
o
•
Zo
• •
•
_z
-~
•
,
Cd
-
o
d~
•
~.
·
o
c.
,
Z_
-=
,"
•
c
•o •oc
=
@
c
~
• •
o
N
c"
.,
•o
•
•
• •= =,
z 9
c
•
~j
-~
•••
~
c
~
•
~
•
,
=
N
••
o
o
o
o
N
N
N
N
Z
~
~
.10"' _U.
- 2:=
.JU
'J
~c
~
-•
_
=
~
,C
•
~.
C
•Cd_
c
••
Z
C
o
o
c
N
o,
o
N
N
~
N
N
N
,
o
•>
C
•
•• • •
o
• •~ •• o• • •• ••
•
•
=
•, •, , • •
•, • o, •,
N
N
N
N
N
N
N
N
N
N
=
o
o
=
•
•=
N
N
o
o
o
o
o
o
o
o
o
o
•
o
o
o
o
o
o
o
- · ·
----...
, ..
- - -· -· -·
--· -- -· -· - -.
-· · ·-· -.
·'.--.=
~_C
N
g
•• • •o
•o • •
= •
=
•, •, ••, •, , •, ~, , ••, •,
•o •
•
• •
N
N
~
C
o
N
•
- · -· - ··
...-
o
o
N
;:
~
,o
-=
g
N
N
••
·
~
0
C
N
c
~
o
• •• •• •o •o •o• •o •o •o
=, o o, o c, o, o,• o, o, =,
•=
,
=
•
--•
N
,
%
o
N
N
N
----.!.
•z
'0
· · ·
•o o
o, o ,;, , , , o, o,
• • • • •
•
o o o
•
•o • •
• • o •
•
• •• •
•
• •
•= •=
= o o
Z ,
=~
N
N
N
=
~
o
~
. --•· •••· •-· ••· -•· .••. -•• -•· •••· ••· ••·
o
=, =, =,
d~
C
o
N
-•· -· · ,· · , - · •· - -·
•
-· · - · ·
·
·
.,
-., - -- • -- - · · · · · · · · ·
----•
, , - -· · -· ·
-- • ·
·
·
•
-,- -- ,
%
,~
•o ••o ••o •o •o
=~
o
••
o
_0
•
• ·
0
c;I
Z
-·
N
.,
~.
... = ,
U
o
_
•= •o
~
~
o
o
N
N
o
• •o • • •• • •• •• •o
• •
•
•
•
o· • •
• •· •· • ••
N
N
=
o
=
o
o
0
o
o
o
• •
N
N
•
o
o
u ••
Z
~
~
_
c
,
~
•
• •
• •
•o ••
• •
N
zO'
',", -
•
0
:>
c
~
•
•
"
~
"
.... --
~Z­
,¥ lI::"
-"
•
'='•
•
c
·
o
34
o
o
·
o
o
• • ••
o
o
· ·
o
N
N
N
0
o
•
,• • =
,
· · -·
N
-.. . =--
=~~~o
~
g~;;g~
<
~o
_
C
_ ~~~=o~.
=- c - - - ___ '" ....
~.
~c o~~o~
,-, :: c
coeoc~co
o=
occcc
QC -
""C'""C
::O~Q-=:=-::
;;>C'=~I;;=CCC :;;lC:C::OC:
";0:'<:00<':00
__ _
"
%
~~
~,.. ­
~
- ------::':: .
~ \.I
. . '" . . . . . . . . . . . . . .... . .
-,
-._...c: .t: .,.. ...."., ..," . -.,, - .. =_. ._; ,_..." .,'
-- ~"'''' - ''"= - -= - ~- ::-::-~
;. " . "...., ,,;
<:-
-. T
1:='
<
.r
-~
~
~-
.. ., ...;
":'
_
~ ,...
"'
"' .r
<:" ....
"' ..,.
1.~";""=
'- "<
"­
.,;
... ..: - . .... .......
_
, "
'" '"
. _~
~,,~
~-
.
,
,
~
_:0 :;
==-."
•
-
, ;: --- -.-- . . . . .......
. . ""--. .
c.:: __ _ 1 ~ ~; ~;= ~g~~:~~=:~oc=
.
~,,;=--
co=-::==
=-::
__________ ;=:000-::==
--------
=C<':"';C='='C -':
=-
<
•
7 ..
,
:..
.;:
~
< -- I'
--_
.... -' .... I
:::: "'" I
~_
I
; - .' '; ..... - =.'
~
.! .... -: - ':" "" ..,
-:':::10:"" ~ ...
.~ ~:<:
":~-
I
~,.
I
-
"" -----,
-
I
-"
<
--
' j "' _
-'
_
•
I
I
C~'
---.:: -.=. '
"" -::"' ~
•
n
=
,,:_,
N~
=
'!"..,~
~
'~"
,
;;- =,-
'" '!" ;;
~
::.
.~.
~
~ -
<
::
..;
:.;. .:.
.....
·~
NNN ' _ · .N~
'"
..
~==;o=~=o..,oo=o~;
C=~=
.
=
=== ? ==~ ~
.
.• -=-:
-=
= ==== = O= = ~~ ~? ~~~Q~_~ ~=~~ ~ ~ '0' '"
_~
_ __
_-.o.,.-....
?-_u~'~=r'~
,,; ::. .. ... ::1,...
~
=-::.=,, =,,-
-'
.... ...
=: ,.;
./'
~
O ' - ~ -"
.: -::-
._
? ,:",~---- ' ."".
- ... . = .• ___
,- (: -: :: • '" .:". :: -. - .-o.,r.
.... _:- _= ,.
- ::
r
~
•
~~ ..:
,0
CO
./'
,,;
----' . '" :- -
-:
....
~ .- -
........ ." . . . .-.-..
N. . . .
- "" _ =___
----- ... '" ..../' - =
- ~~
...-...
~ ~~.::n=n=
•
.=.--
<
<
......
~ '"
----e> _':.O
l' :- ••
~
~,
;" -'
----------------
...... ..> .:
~.".'
.,.:;~
~:-.-=
...
~=~",
0
,_
, ___
"
"",
, ,
... -. ,_
,
35
__
,
-. • .:!
----= .-
..-
" ..,
.'.., -" ........
-,;-"
--
_
'"
'"~
"'o.....
.~
o
o
II
~
v
e
.~
~"'
C
v:::l
"'
.",
,
o
C
~
,
36
Note: Spoiler has no eff~ct on lift for
lal>17'.
w
"
. I":::::"
-"- -
· (a)
Figure 7
Lift
... Ai r foil Section Characteristics with 20\ Aileron and 10% Spoil e r.
I"': ""1 ":.::: i'LU}.
I: :
•
' Ii::' . . , " i 1,lu~!'! : I :
, '1 •. "
,:;"
I ' ' •. H'i':: , "'. "'1'1 : ·. :' ;:i '.': '.';
" .• " . . "," ." , •. ,.. , .. i. " "·1·" "i ' . ' " " ' . '
,:
:: .:
: .: ,: ,r
~
: : : ~ .:
:
: :: '
•. • I. -: ... _: .;;
.:
: ;.: .: : ' ::.:
::
I".
... .:. I
: : ", fl· . I
: : :
i!i ' :
,..
.•
e""
'··'
.•
"
•.
I""
..
'
"1
I,;:",
"
~
'
i
t'
.,
"
f:::: '. . :;; :::: : :: : : :.": . : .. , '.
:: :: : : : : .
.. ' ''-.
. : ; I ' , . : . , I.· ., "
I,."" " " ,.1'..:;,:1' 'iI'
1..': ': "
, I ~ II ; II H i'
I ,' .. " , . I'
,
i; : I,· ····
II
I
,':
'
•. ' "
171 ';:: , .. " .. , . '
! ": '
. '
1".
:
".. "
; : :.
.
: ::
tlliU ·
,
.;
,......
, ",:cl..:...t,
.,:;;.
: . ......
.
.
.
I·
• •:
::";'
' l:
I
'""""+':c.,, ~*•. '
~i;jlrl
I
..:
.~. " "
,.:
: : :.
., ' :
: '
I: :I i :: :i .' :' .i
,. V . ,t: I
.
, ..
.i": : I"":
: 1111 · ;;" ";:;:
...
: . ;I
'
I
'
i : , . : ': I:
'i
.::
. • ::!
.
:
,;
;',!
:::
i,! i
"" : i"
I I;.
I'.
. ,'
'"
.
!;J;':,'!m;
, ,'
..
:
I: I
.1
1:1
.,
I
, .,
II,
'i::
: .
I I
![ I 'I '" i
I
i II ~rr ~: :
I : ii'
't"I:';'I"
it l'- .: I 1 if'!' •• i i
.
, ' " I'
1'.•.·1:· .'-.·
[;T ' ..•••• ·.· . .
' i'l
:',
. Ii!
. . " . " ,.
. .•.. ,...
. Ii' .
~I.: :":: d,
::: i, ': · " '::~ I
'I'
.
,
;
"
,
"
r:.:, ,' "~ ,; ;'1: l <uU!U,
I'
. ''\: , ' 1 ' ' , :
I •. :.
1: ' "', :. ,.
;
:
'
:
.•
, -I~: !;::
!U··,. ,. ,.'.
, . .,' : " .. i' ' ' : ' 1-'.
'.. W:i y%r-~ , ~ , " I~I~
: •
:
, ~
~I '"
' 1:'
,
i'L
'I
Jbi ' ". l'"-L"
' . '., q.m:~ .
.
i
..•. ..... ·.·.··1: .. I,· ·i · . ;--~ ,.. • .. . .1'\ ., , " ,: i,'
1'" •.• ' '8': ,"1 •. ·. t •... ' I,, ·. ,. .
I '.' i:.'·
r"
. +: ." ,.. ... ',. ··.·{l" I ' . 1- •• ·
.
'
•
.. ,
• ..
.•.
. . , '"
-I
.
.
l _~_;.:'"
= i' •. h· ' '['. I.:{ ......... '·'.. ...•. 'II
..j'.l,e,.
r" ..I . 1' 1 · ' ··. ·1·
. .• ,i."'"
,,.i ,,. , '.'
~
i
.
"
~
.
,
"
•. , ,
I:.•• ·'; '
. 1c .
• ' . ' ,
L. '-'- ."' .
. :11 '1I,!y" ' I : ; , ~ 1-' : ~ ,i . .i· !.' t, I~ jh
1-:..: , . "".,. , ~ ,. :"1"+" I· ... " P '''' 2
•. ,II L>-::'--rv,:.- :,1
. i I'J'
.1
•.... r"..
i l i'; f
I
' Ii'i
' i ,'1 l. 'F'
.. .
fl'!
-: :,/~I I I Y!<I':
:J 1-I''-i. ~ .+ II' " . IU'
LL " .,;
. I ' 1' II'
ro, , ,"
..;". .. . , ",,', .. I' ··· ···..... ... I .!I:; 1'1 . , .• i' I! •. 11, ' LiD
.... ; 1\ L. '~~ !. 1" 1\ .. "1 I " I ,: "1'""
; ! ':i ,. ' i ~!J'
I . i·.I ~ ...'. I ' j,, '. i ."r'~I, ' ; ,.... ' .' '; "~ ' 1
ur,
.' I·· .'·' . . . I"> I " ." , .
,,f,
• . , •. , .
:. ..' . .'. '•. ' :10::::'' ' : .,.- r, ." I: ;;" i " _'i. ' i~ ':0:1" :' ';0; .
'fll.;."I:} •.... ~ .~ .. ' ~ Le· ·I;: ... i ' . !f t~ ' ~ ;1i'
i
,.'..
.:'. · · !. "'.I'· ,H,·· . :" ..,. i ' I " " Ie," ,'.,
•. I '" •. " ':'1 1 '. ,. ..•...• I , .: : ' '1 : 1 .. HlJ;' ,.,.
::.c ~ c...• ' 1".'.J'1' Ii··.·
.Jed' . I . ...... . ' .," ,,"
I ' !.. '.
I'·", . I
.. Ii" I, I; ·t !.:; .2
.' !.._. .,.. .. i. I ' ..i .;
: I: .
: . , r 'l l " •.
'j
o· ·,·e
'1
I I. i
1" , ,"
! '.1 "
38
I'
·It.I ' I'L '.'
-.a
,..
..,•
..,
~
~
.......0
u
~
'"
U
~
....u
~
0
u
r~
~
~
..
....'"
39
A
o
Figure 8 - Effects of Aileron and Spoiler on Power Coefficient.
..
~
Figure
9 - Effects of Aileron Control on Power at 33 RPf1.
c
o
k
•
.....
~
'"
,
, , '- '-, ,
,, , / ,
,,
, , /..... \
-i
-I
'"
'0
I
I
a!,
.c
~
"
0.
C
0
k
....•
.
~
'"
c
o
.~
"•u
.,.'"
"00
'"c
•
k
~
l
0
'0
....•
x
"
k
k
k
~
.~
N
,..,
o
"
N
~
C
0
.~
"
'"•,
U
~
~
a
k
(j
~
42
C
0
....•
.~
"
0
....
•
"'"
'"
k
.~
r--
...
w
ileron
. 69 x / R
1.00 x / R
(b) plan form Schematic
Figure 10 - Concluded
APPENDI X A
Incremental Effects of Control Surfaces
The following equations are based upon experimental data from reference Al .
The airfoil for which these increments were obtained is the NASA
lS (1 )-0421 MOd, a 21 % thick section.
These incremental effects should be
reasonable for the NACA 23024 and other airfoils of similar thickness.
sections less than 15%thick, more appropriate data should be used.
For
The
forms chosen for the incremental equations will have rather general applicability, but the coefficients should be adjusted based on more appropriate
experimental data, when such data are available.
Ailero n Increments
lift :
(A1 )
0° -< 0a -< 60° •
_60 0 -< (; a -< 0° •
•Note:
1·1 , .stall
• sto 11 = 17" for the NACA 23024.
Al
}
(A2 )
Qr!9..:
aC d
=
ca
c (1.05 sin' ' a)
1· 1, .sta ll
0° -< 6 a -< 60° ,
aCd
= ~a
(0 .65 sin' ' a )
_60° -< 6 a -< 0° •
1· 1, ·stall
j
(A 3 )
}
(A 4)
}
(A5 )
}
(A6)
Hinoe Moment:
c
ch
= Ca
( -. 0035 - .0542. - 2.00 sin 6a )
1· 1~ . stall
0° -< 6a _
< 60° ,
ch
ca
=C
( -. 0035 - . 0542. - 2.95 sin 6a )
-60° -< 6 a -< 0° •
1· 1, .stall
Ail eron Effects at Post-Stall Angles
For post-stall cases, no appropriate experi mental data are available.
Therefore theoretical results for Kirchoff flow (fully separated, inv;scid)
will be used.
(S ee reference A2.)
Sketch Al - Kirchoff Flow
A2
The normal force for this flow ;s given by:
(Al)
where
Cn
211'sin a
For a = 90°, equation AB gives cn = O.BB .
ments cn " 2.
(AB)
= 74"""'+=-,"I;'s"';"n7-'-."
From two-dimensional experi-
The discrepancy between theory is primarily because the base
pressure is not modeled properly by the Kirchoff theory . To correct for this
effect. a correction factor K ;s introduced.
tA9)
where
K = 2.0
.88
= 2. 27
This equation (A9) will be used to calculate the normal force for a
deflected aileron at angles of attack beyond stall. where no experimental data
are available . The load distribution will be assumed uniform over the aileron.
The loading on the portion of the airfoil forward of the aileron will be calculated in the usual way. using the data from SUBROUTINE NACAXX.
The steps
in the total calculation process ar e:
1.
Obtain c] and cd as a function of a for the airfoil without
aileron from NACAXX.
2.
Transform lift and drag coefficients to chordwise and normal
force coefficients:
A3
3.
Cc
=
cd * cos(o.)
c t * sin(o.)
(A10)
cn
=
c t * cos (a) + cd * sin(o.)
(A ll )
Calculate the contributions of the area forward of the aileron:
4.
*
(1 - calc)
(A 12)
Cnl = c n * (1 - calc)
(A13)
CCl = Cc
Calculate the aileron normal force coefficient, and resolve
into components parallel and perpendicular to the airfoil chord:
=
2.27*21f*sin(0.+oa)
(A 14 )
4+" Isin(a+oa) 1
normal component:
(A 15)
chordwise component:
(A 16)
5.
Calculate aileron hinge moment:
(A 17)
(Assumes uniform load distribution on aileron. )
A4
6.
Calculate airfoil plus aileron force coefficients:
(A 18)
(A19)
7.
Convert to lift and drag coefficients:
cc * sin(a)
(A20)
cd:: cc*COS (a) + cn*sin(a)
(A21 )
cg, ::
cn* cos(a)
(These are the net sect ion lift and drag coefficients, including
aileron effects.)
8.
Return to mai n program.
Spoil er Increments
Lift:
.c,
= CCs
(-9.9
0° -< 6 s -< 60° ,
1·1, .sta ll
1·1
lIcg, :: 0,
Drag:
,cd
C
= Cs
.
51n os)
(0.93
sin 2 os)
(A22)
(A23)
>a stall
1·1 ~ .stall
0° -< 6 s -< 60° ,
}
}
(A24 )
(A2S)
lIcd :: 0,
1·1> .stall
AS
Hi nge Moment:
ch
=.:.e.
C
(0 .175a - 6.7)(sin 2 ,s)
0° s a S (Is ta 11
ch
=
+
C
ch
(0 .075a - 6.7)(sin 2 , s)
-astall sa
<
0°
lal
>
a stall
= 0,
}
}
References
Al.
Wentz, W.H., Jr., and Fiscko, K.A.: Wind Tunnel Force and Pressure
Tests of a 21 %Thick General Aviation Airfoil with 20%Aileron, 25%
Slotted Flap, and 10% Slot-Lip Spoiler. NASA CR 3081,1979.
A2.
Kennard, E.H.: Irrotational Flow of Frictionless Fluids, Mostly of
Invariable Density. David Taylor Model Basin Report 2299 , 1967.
A6
(A26)
(A27)
(A28)
l\PPENDIX B
Computer Program Listing
TO KUN P~RF ~R ~ANCE STUDIES Dr VARYI NG
WINC SPEED OR RCTATI ONAl SPEE D.
~OCIflEC
PJ{CGR AM "'RCP
L
C
L
C
C
THIS "'RO~~AM WAS CEVEl OPED BY STel N. WAL~ER AND
RUOE RT E. ~ILS ON , DEPAR T~E N T OF ~ECHA~IC~l ~N G [NEERING,
O'EGllN ,!ATE UNIvERSITY. ALL CUEST IONS UP. PROHEMS
CC~CERNING THe "'RUGRAM SHUULD Be DI~EC T EU TO THE ABOVE .
~
C
C
~
C
MOO It-IEU ~y MEL SN YDE R, GILL wENTZ, AND CYRUS OSTOw ARI OF Tt-t WINO
e~ERGY LA B AN U ThE AIRfCIL RESEARCH GROUP AT WICHITA STAT E UNIV ERS
C
C
C
- - - MUUIFICATIGN OA TES -- JUNE TO UC TOBER 19r.
L
L
••••••• MAI~ PRCGRAM ••••••
PROP CALCULATES r~E THE OR ETICAL PERFORMANCE PARAMETERS Of A
'ROPELlER TYPE .I~O TUReINE. IT UTILIze s A SIMPSUN 'S -RUlE
METt-OO I THREE PASS TECt- NIQUE OF 'U"ERICAL I NTEGRAT ION.
C
L
_
(
L
METHOD OF C(NTRCl MAY BE - III PITCHING OF THE TIP SE CTION
121 USE CF DC TeO ARG spellER S
131 USE OF AILE RONS
L
L
C
L
L
L
1
CHOI2,5Cl,ThETX(l,50l,CIMI50J
I HO PEI R,OR,~d,O ,V,X,T H cT P ,A Mao ,H,Sl, GO , O MEG A, RrlO , VIS,H L,
1 PI , RX, 10" ~PRCF , AP f , RAO EG, (aSS I ,( S2, NF ,R R( 50 I , ( I ( 50 I ,r HE TI ( 50 J ,
2 T1 , r 2 , T3, T4 , T5 , Tb , T1 , T8 ,x ETA, HH , MO , CA I I 50 I ,C S I I 50 ) , OA I ( 50) , OS t I 50 I
DIME~S l UN
ca ~~ CN
3,~CGN,HMFtKFLAG
OlloA EN S ION PHD(2) ,PFACT(2)
DATA KW , P~ O,PFACT/lt· ~P ',' KW ',1.3 4 1,1. 1
L
(
•••••••• DEF IN E INPUT AND OUT PUT I'DICES ••••••
L
KH=5
r<.P =6
c
C
IOul=6
•••••••• REAO INPu T CATA •••••••••
REAO (KR,42J~ aOE,N INC,I N (VEl,(NCRPIoA,I PRt~T ,KFLA G
REAO ( KR,10 JR, OR ,H e ,THETP
REAO (~~tl O le,V,C MeG A,AM aO
REAO I KR , .}O )
H,SI,NF,GC,~"ROF
READ I KR ,~ C I
HL,~O ,APFt X ETA.~ H
REAC I KK ,~1)AF1,AF 2 ,Af3,AF4,AF5,~CC N ,TIP I(H ,TI PL , SPAN,O EF L,p (rSPN
RE A0 ( J(.j.{ , 2 a I ( RR , 1 I ,( 1 ( I ) , H i ETI ( 1 I ,( A1 t I J ,( S I
· NFJ
\olRITEIKP,6C)
wRITEtKP.61J
B1
(l
J l OA t ( 1) ,0 S I I I J t I = 1 ,
RM:;:O .JO~d"R
wR 1 TE (KP ,62 J Af 1 ,AFoI! ,AF 3 ,AF~ ,AF5, tl ,R"', 5 J
WRITEtKP,031
GC TO (d4, 9 5, ~o ),~C CN
84 wk l fetKP,(4)l[PICt-',TIPL
GO TO 89
85
~RITE(KP,65)SPA~,P(TSPN,OEFl
WR1TE'KP,67J
GC TO 89
U6 WRITE'KP ,6bISPA~, PC TSP N ,DEFl
WFltTE{KP,681
CC TO (1 ~ ,21,22),KFlAG
19 WRITE(KP,78J
a~
GO TO 91
21 WRITEIKP,79)
GO
TO 91
22 WRITEIKP,83J
9 1 IFIIPRINT.E'.II GC TO 90
WHITE(KP,17J
WRI TE{KP,70J
WRITE(KP,74J
WRITEIKP,15J
WR[TE(KP,76)
wR IT[(KP,7 C I
qa
~G
500 NO:;:l,NINC
IF( IPRINI.E".2I GO TC 13
'rt R ITt:(KP,69)
"' ~ ITC(KP,71J
w.HITEIKP,1Z)
WRITE(KP,731
\,RI TI:(KP,6~)
13
I F(~U~ E.~ C .1) GO
TD 6
IF'~L Oc - Z )4S 9 ,7,4q9
6
~DEL·
INCVEL
1J"'\I +IJOEl
GG TO 8
7 RPl'!iNC=INCRP I'1
a "'I:GA~OM~GA.~PMINC
a
IolI=J.14l5S3
= n11 80 .
FPS~PH :;: 88 ./60.
RAOE~
IST CP =O
SCAlE=l.
CO'TI'UE
R :;: R.SCAlE
HH :;: Hij.SCAlE
OMEGA '
DO
't
l.
l
4
OMEGA/SCALE
I=l,~F
C ""4 ( I I= () .. 304S*SCALE*C 1 t I)
:;: ' " I ) . SC AL E
l io(c:AJ =O
Cl(1)
Ii'i I T I Al \JALUES
51 = R
5 TUR [
S2
S3
=
::I
OR
He
62
Sit '" THETP
S5 = V
S6 = (Me GA
S1 = SI
(
51
IS lONCIN G
A ~G LE
(PSI)
CGSSI=CUSISI*RA OEGI
CSl=CCSSI*CCSSI
W=R~CCSSl*G~E G ~*PI/3u.
x=.,./v If P5P1PH
l.
iNITIALIZATION AND CONSTANT P ARAMETER CALCUlATICNS ••••••
•••••••
C
THETPz-THfTP*R4CEG
V=v*fPSM?H
OMEGA=OMEGA*PI/30.
SI=SI*RAOEG
SUMl = 0.0
SU"2 = 0.0
Q'=C.O
oy=o.o
Tx=O.O
n=o.o
P x= C. 0
PY=O.O
AK= 1.
C
ASTCP=O.O
I~OUCEU vELOCITY FACTORS ARE SET EQUAL TO ZERO TO BEGIN ITERATleN
A=O.O
AP=O.O
HMCPI=C.O
C
CGNTRL=J.C
'(C"TROl' CCUNTS STEP
I~
3-STEP
S[~PSON
Rt;LE tNTEGRAThlN
KHG=Q.OU237t 9 lq~·EXP(-O.2 q 7·H/lOOOO.1
RX=R
C
CORRECT FCR CONING
R=R· COSSI
REF
=BO*k,
l)R=DR*R
ORC=OR
HB=l1u*COSSI
L
L
I ~ "I
IS NUMBE R OF STEPS ACRCSS SPAN,OETERM1"ED fROM INPUT VALUE
CF OR
N~=tR-Ha)/OP+3.
IF! IRE'O.CT.OI
00
11
~O
TO 5
1.::o1,NF
RRtl)=R*K R(IJ/IOU.
U
5
THETI
(l
).aTHET I (J) -tRADEG
C
CCi'lTIf\tJE
SET R LCCAL ECUAl TC RMAX
c
c
•••••••••••••••••••••
NUMERICAL INTEGRATICN FR OM TIP TO HuB ••••••
C
CAT""'l.
IFIGO.EQ.2.1 CAT=2.
83
ClFA-l.
IFI GC .lT.2.1 GO TO 503
lF IGO .E Q. J .1 Cl FA=O. O
IF IIREAG.GT.OI GO TO 211
CA LL SEA RCH IRL,C X1,T HE TXl,CA,C S , DA , OS)
ll!
~
Sb3
C=CAI
TI1 ET = THETXl
CAll CAL CIRl,C,THET, QX ,TX,A,AP,F,ClFA, CAT ,Cl,C Q, ALFA,C H, CA ,( StOA t
20S1
RE -iNITIALIZE 'A'
A=O.O
CAT=O.O
t
~EG I N · M'RCHING
ACROSS
SPA~
FR OM TIP TO HUB
DC l JD l'=l,r-.N
C
50
c
DC r-.cr MARC~ t NSICE HUB
IF IIRl-HBI.GE.ORI GO TO 50
ASTCP: ASr CP+l.
IFIASTOP. GE.2.1 GO TU 9 ~
OR =I Rl-HBI
IF I GO .lT.3.1 GO TC 311
TES T FOR STEP IN 3-POINT SIMPSON
lFIC ON TRl.EQ.O.Ol GO TO 311
TIP=Rl-OR
IFITIP. GT.REFI GO TO 312
IFIC G~TR l.E~.l.1 GO TO 311
DR =(RL- Rcf )
ClFC=IREF-TIPI/IRl-TIPI
C IF''"-. S*CLFC
312
C(' TOl=l.
GC TO III
ClF=O.O
;11
OR2 =00 12.
OT6=vO/ lo.'C OSS II
C
I NCRE ,"1Ef'1IT ' R' IlY
' DR /2'
Rl= Rl- ORl
I F(C CN TRL.EC. O. O) e lF=1.
IF(C ONTRL.EO.2.C) CLF=(ClfO+l.J/2.
I F IIREAD.GT.OI
GO TO 202
L
Fl~O
LWL
CA LL SEAJ<CH (RL,CHO{l,l), rHE TX( 1,l),CA, CS ,OA, IJS I
C=C hJtl, L I
THET -= TrlETX Il,U
C
CA LCULATe
LOCAL CHOReS AND
V~LutS
A~GlES
AT R+OR/2 STATION
CA LL CALC(HL,C,THET,~XPl,IXPl,A,AP,F,ClF,CATrCL,CO,ALFArCH,
ZOA,OS)
INCREMENT R BY OR/2 AGAINITOTAl I'CR<"ENT = OR I
RL=RL-LJR Z
c
ClF·I.
IFICONTOl.EQ.I.OI Clf=ClFO
IFIC ON TRl. E~ . 2 .01 ClF=I. U
IF I(HEALl.CT.OI GO Te 203
FI'O lCCAl CHOReS ANC A'GlES
lu)
CAL L SEAHCH
C=CnO(Z,LJ
IF' CONTR l.E~. C . O l
TNET
~
IRL,ChOll.,l),THETX(Z,LJ,CA,CS. DA,DS )
THETXIZ,LJ
64
CA,CS,
C
CALCULATE VALUES AT R.OR STATION
CALL
CALCIRl,CfrH(T,QXp,rX~,A,AP,F,CL~,C~T,CL,CO,AlFA,Ch,CA , es .DA,
2051
THETA=LUCAL ELACE T'IST'PITCH SE TTIN G
THETA=THET+T~ETP
c
PCRL=(lOO.I·RL/R
RL/'I=O.304a*RL
CI"I=C.304S*C
NExT ~ STEPS INTEGRATE TOR QUE,THRUST AND
C
SIHPSCNS RULE
C
3 ~AL UES ARE AT R,R+DR/Z,ANC R+OR
QYX=UTb.'OX+4.-0XP1+QXPI
QY -=C:Y
PO~ER,UStNG
3-P OINT
QYX
+
TY=TY+urb*ITX+4.*'XP1+TXPI
PY=?Y-+OMEGA*CYX
Hf'lCf'I=HMGM+HI"IF*OR/COSSI
IFIC ON T R L.E~.2.1
CONTRL=O.O
GO TO 313
IFIIRL-lIPI.E Q.O.OI Ge TO 313
IFICGNTKL.E~.I.I CR·REF-T IP
IFICON1"L.E~.I.1 CUNTRL=2.
GO TO 31'
IFIC ON T R L.E~.O.OI
JIJ
OH.=DRC
.:1.:.
CCNllf'otUE
OX =,X"
H=TX?
NEXT 3 STEPS CALCULATE TCRMS TO EVALUATE AVERAGE A I'AVA'I
aVeR THE SPAN
'AVA'STc" BELe. ceMPLETES THE CALCULATICN
C
L
C
AREA
SUM!
= DK-(Z.*Rl+ORJ
=
SLf'll+AREA
SUM2 -= SU I"IZH I.-A'-AREA
IF I IPRINT .E(;.21 GO TO IOC
29 GG TU
133,3l,3l),MCON
33 CH=C.
31
~"'S=W.O. 4 41C40
WH[TE'KP,80)PCRLtRLM,CM,T~ETA,ALFA,WMS,CL,CO,CH,QXP,A, AP
luu
'3
CCNTINUE
CC~TINUE
CTY=Jv/(.5*RHO*V··2*PI·RX·*ZJ
CPY~P~/(.5·RHO*V··3·PI*RX·*ZJ
TP=PY/731.6
PWR2TP*PFACTI Kw)
AVA-l.-SU"2/SUMI
L KESTCRE lNITI.L VALUES rOR POSSIB LE RERUN
IFIIREAO.EQ.lI GO TO 105
DC 104
l:1,~F
l u,
RRI I'=IOO •• RRI I II"
THETIII,=THETIIIIIRAOEG
I REA O·I
Lv:'
CC/\ II NuE
R = SI
UR = 52
HB ::I S.3
H - E TP = S4
95
V
=
55
OM EGA =- S6
S I • S7
sa = X
VM$:O .447 040*V
UY~ ~=~Y·l.35 S8jj
T't N=4 .44 d2 1*TY
CC=CPYlX
HHCl"=HMOM*.7376
IFIIPRINT.E~.2I Ga
TO 490
WRITE(KP,17)
WRITE(KP,70)
wRI TE IKP, 141
WR IT E(KP,15J
WRIIEIKP,1bl
WRITE(KI',10)
490 ~RIT E 'KP,81IV,VM S , O MEGA.X,T~ETPt Q Y N ~,TP,C P y,TYNt CC ,HM O M ,AVA
IFI
sao
IPRINT.E~.2IGO
sao
TO
WRIT':(KI',8131
(eN Tl NUE
GO TO 502
4<;9 ~ R IT E ( KI-' ,815J
GO
TO 502
C
•••••••
(.
fCR~ATS
FOR
INPUT AND OUTPUT S TATEMENTS ••••••
(.
10
FCR~ATI4FIO.31
~O
FOR"ATI7FIO.51
jJ
FORMATllFI O .3,I2, 8X ,~lO.2,t4)
40
FC""ATI5FIO.31
41
FOR~AT'~A2,15,6flO.5J
"2 FG."ATI61101
60
FOR~AT"1',4 0X t'PERFORMANCE
61 FORMAT"
OF A
fr42 X ,'CALC ULATE D BY
HI~O-AX[S
MU O[FIED PKCP
~'NO
TURBINE')
PRQGRAH"
62 FOR ,..ATt' . JI,aX,'eLAOE SECTtQh - '. 5 A2, 5X ,' NO . BL ADES = ',F 2.D ,7X,'R
2AU!US = ',F5.2,' MEYE RS
CONING ANIiLE =',F4.1,' CEGREES')
63 FCKMAT(' Q',8X,'MET""'C:J OF CONT RO L - ' )
64 FCR.'oIAT(' ',30X,'T[P SE CTICN PITCH, AN GLE Gf P ITCH =', F::i . l , ' DEG REE
4S
TI~ SECTlON LEN GTH =',F4.1,' METERS')
65 F O~ "AT(' 'r3(')X,'A[LE RGN S,
SPAN =',f5.l,' I'4ETE RS ( GU TBOARO ',F5.1 ,
5' PERLENT J
DEFL ECTI ON =·,fb.l,' DEGREES ,)
66 F aR ,.,AT(' ' ,'; OX, ' SPOI LE RS,
SPA,.. =',F5.1,' "ETERS (C U TeOARO ', F5 .1 ,
6' PtRCENT)
Ot::fLECTI ON =',F6.l,' DEGREES"
67 FaRMAT('O',35X,'AILE~aN CH ORD IS 20~ CF LOCAL BLA.DE CHORD t)
68 f ORMATt' O',30X,'SPOILER C~URO [S lO ~ OF LUCAL CHO RD - - HINGED AT
*7C:t CHORD' J
6S F UHM ATI' ·,3X,3('I--------,) ,'1-------1--------, ,5('1---------",
92 ( , 1-------, I , ' I ' )
7 C FeRMA T( 1 1,3 X,3 ('I--------", '1---------1-------, ,3('1---------·),
7'1----------1--------1---------1-------1' 1
11 FOR MA l(' ',3X,'j
BLACE
I RAOHiS
1 LOCA L
'PITC'" IANGLE OFI RES
IULlANTI
COEF.
I
COEF.
I
HINGE
I TORCUE I
•
I
A"
1'1
12 FC RMA f(' ',.lX,' I ST4TION I
I
CMOHO
I ANGLE I ATTACK I VEL
2CCITY I
OF
I
OF
I 'OMENT
I INCREM ENTI
I
I 'J
73 FOR,.AT(' ',3X,'I(PERCENTJI(fIIETEASJ , "'''E l ERS ) I(CE G.I I I OEG .1 I 1M
3/SECI I
llfT
I
CK'G
I
COHo
I IN-"I
I
I
I'I
B6
74 Fr.;R"'AJ('
4Ut
I
'. 3X ,'1
PO"ER
I
75 FeR MAT"
'd X ,'1
5'1',9X,'J
COEF .
76 FOR ,' ''AT(' ', 3x ,'1
OMJ
I
I <>J
FREESTREAM
PO.E.
I Tl P-SPEECI PITCH I TCR Q
I •)
I TORQU E IHINGE MO MI
A
I SPEED
I
RATIO
I ANGLE I ',q x .
IANG ULAR
THRUST
jd~D SPEED
J'tl OX ,'1
COEf.
01PHI
I
(M/SI'
I
CP
I POI. Bl ADEI
( RPM I
I
I
I~EWTCNJ I
FU~MA T(l u ',//,6 X ,'l N TEGRAT EO I{ESlJLTS
CQ
(AV E )
,'I
X
I (DEG)
IN-." )
I
INI .)
77
--',Ill
78 FUI{I"'AT('v',40)(,'NGTt::!"A" IS Z.ER O ; IN UUCt::O vf::LOCITIES ARE IGN{JRED'
· / /1
79 FOHf<lAl(' Q',4 0X ,' NU TE: -O.S.lE. A .LE.+ C.5'11I
80 FCKMAT(' '.FI O.l, t-10.Z,f-ll.3.F8.l,F9.1.Fl O.l,F9.2.Fll..3, F lO. 3 .flO.
dl , FS • .3 ,F 9 .41
dl F U R~AT('O',F9.1,Fll.2,F8.l,Fl~.3,F8.l,FlL.l,F~.2,FlO.] ,FIZ.l.F8.3.
IFlC.3.f 8 .31
83 FO~"'Al('u',40X,'NCTE:"A" IS NeT LIMITED'//)
d13
fG~I"'Arc'l'l
tH~
FGRfoIAT(ll,Jf,2X,''''CCE
502 CONTINuE
I,., ERRCR,
PROGRAM STOPPED ',
STep
EN D
LL LCCCCcCCCCCCCCCCCCCCCC CCCCCCCCC CCCCCCCCCCCCCCCCCCCCC CCCCCCCCCCC CCCCCC
SUBKUU TI NE SEARCH (RL,C,THET,eA,CS,DA,DSJ
C
(
C
••••••• SEARCH - CETER~INES THE (HCRO AND THE T~tST ANGLE AT
A GiVEN _AGIUS ALeNG THE S?AN. IT UTILIZES A LINEAR
L
INTE KPO lATIC N
T~CrNI~LE.
cc~~o~
R .DR,~ B , B ,V.X,THETP,A~UO,H,Sl,G O ,OME G A.RH O , VIS,H l.
/HCPEI
1 PI, R X , W, NPR CF , AP f , R AD E G,C OSS I , CS 2, I\jF , RRC 50 Ire I ( 50 J r THE T It 5 01 •
2 T I. TL,T3,T4,T~, T6, r7,lB,XETA,HH,BG,CAI (501 ,CS" 50 I ,OAII50) ,OS I( 50)
], MCCN ,HMF,KFL AG
RR.Vzrl.l
IFIRRv.E~.RRII))
GC TO 50
t
FIRST R IN ARRAY LESSTHA,., RLOCA L, ANO BRANCH TO
INTEk~OLA1ICN STEPS
L
DC 20 1= 2 , NF
IFI . RV. GE .kRII)) GO TC 10
IF ~ L CCA L IS lESS THAN LAST VALUE I N TABLE, SET R: lAST VALUE
L
l OCA l~
IF( 1.EQ .. NF) GC TU 30
20
IIJ
CCNTiNUE
,
CC~PUlc
J=l+l
I~TERPOLAT EG
~ALUE
PE R' IRRV-RRIJ-Il)/IRRIJ-2)-RRIJ-I)1
C, P ER + leI I J-2 ) - C1 I J-I ) 1 'C 11 J- 1J
r H ET= PER. ( ThE T1 ( J- 21 - THE T 1 ( J-I ) } + THE T I ( J- 11
CA' PE k' 1CAl I J - ZJ - CA 1 1 J-lJ ). CA I I J- 1 )
CS,PE.*ICSI IJ-2 )-CSI IJ-I) ).CS 11 J-I)
DA z PE R. t DA I ( J -2 ) -OA I ( J-I) ) + DA 1 « J - LI
OS'PER +IJSIIJ- 2) - GSIIJ-lJ )'CSIIJ-I)
RETURN
C
30
t
c~G
I~lt RPCLA TICN
C'CII"-)
vALUES ReCU IRED ARE AT
IHET'THHIINF)
FI~AL
B7
STATIC,.,
C
50
CA-CAII.fl
CS=CSIINf)
UA=OA IlNf)
OS=[;S II~f)
RETURN
VAlUES RECUIRED ARE
C=C II II
THET=THETII II
~T
FIRST ST4TION
C"=CA 1(1)
CS=CSIIII
CA=D," II
US=DSIIII
RETUR/\
ENlJ
LCcCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
SU8RUUTINE
CALC(RL,C,THET,QF,TF,AtAPrF,CLF,CAT,CL,CO,ALf~,CH,CA,CS
2,DA,l)SJ
L
L
C
C
••••••• CALC - DETER"INES T_E A'IAL I~D ANGULAR INTERFERENCE
FACTORS AT A GIVEN RACl~S A~O UETERMINES FU~CTICNS DEPENDENT
UPGN THESE PARAME!ERS.
L
CCM~CN
IHCPE/
R,CR,hB,8,V,X,THETP,A~ao,H,SI,Ga,OMEGA,RHO,VIS,HL,
1 jJl,RX,W,NPROF,APF,RADEG,COSSl.CS2, NF,RR(SO),CI(SOJ ,THETl(SOJ,
c
2Tl,T2,TJ,T4,T5,T6,T7,T8,XETA,HH,HU,CAI(SOI,CSI(SO),DA1(50),051(50)
),MCCN,HMF,KFlAG
SET INITIAL VALLES
DHA ACK/O.51
XL=RL·OMEGA/V
RH=nJ:!
SIGB=d'C/PI/RL/8.
THETA=THET+THETP
c
IF LAST VALUE OF
L
TC C. TO START I TERAT 10'.
C
L
C
C
c
IF LAST VAlue OF
ro
START
'A' WAS GRI::ATER THAN 0.5, SeT
INlTIAL
'A'
EOUAL
'A' "AS EQUAL TO OR LESS THAN 0.5, USE LAST 'A'
IT~RATla,
BEGIN ITERATICN FOR 'A' AND 'AP'.
CGNVERGEJ AT 50TH STEP.
IFIABSIAI.GT.ACK)A=O.O
DO 10 J=I.50
SA~E ClO 'A'
GETA=A
ITERATION WIll CEASE IF NOT
ANC A-PRIMEI 'AP' J
DEL TA-AP
"HI IS RELATIVE 'dND DIRECTION. INCLUOING INDUCED EfFECTS.
PH [= A TAN ( I 1.- A J -CO S S I If ( 1 • .. AP ) .. XL J )
IFIAOSIPHII.LT.O.OOOll PHI- SIGNIO.OOOI.PHII
SI~PHI=S"IPHII
COSPH I=COS I PHil
ALPHA IS ANGLE Of ATTACK
THETA IS lCCAL BLADE PITC" ANGLE
ALPI-AaPHI-T_ETA
88
C
l
• ••••• CALCULATION OF SECTIONAL LIFT ANa DRAG COEFFICIENTS
C
CALCULATE RESULTANT VELOCITYI''W')
W=v-S(.;Rfi' (1.-AI-COSSII**2+{( l.+AP)·XU-·n
,5J
CALL
NAC~XX( R L,RX,Sl,ALPHA,CL,CO,Wl
GO lOI22,21,lU ,MC ON
CAlCUL..HE CCNTRCl SURfACE
C
It-lCREI"ENTAL Cl.
I NCREMEN TAL CO. AND CH
21 CALL INCRE~(ALPHA,CL,CDICH,CA,OA,CS,OS,C)
22 ALFA=~LPHA.57.2~578
d u .)
L
C
L
()o6
IFI"LeN •• '.11 Ch=O.
eCN1INuE
IF I GC.L T.3.1 GO TO bb6
Cl=CLF*CL
F=l.
GG TO b67
......
CALCUlATleN OF TIP AN( Hua LOSSES ••••••
IF(CAT.E:Q.l.)
F= O.O
IFICAT.E_.l.1 GO TO 667
XXl=
AdS(COSP~l/SINPMl)
XX L(= XXL -R/Rl
~A Ll
TIPlCS{XXL,XXLO,F,e,GO,HL,PI,R,RL,PHl,RHI
b67
CX=C l*SI NPH I-CO·C OSPHI
CY= CL.CCSPHI+CU*SlNP~l
I,..
'A MaC' lJETERMINES MADEL fOR 'A'.
IFIAMCJ.E'.O.1 GO TO 575
V~R=SlG6*CY·CS2/tSlNP~I··2J
VAH=Sl~8·CX/F/SINPttI/COSP~1
CAN =F.F+4 •• IJ~R.F·(1.-F)
IFICA".LI.O.OI (AN=O.O
C
\..
'A' IS I NCU CED AXIAL VELOCITY FACTOR, 'A' IS INDUCED RADIAL
VELCCITY FACTOR.
A= (2. *VBR+F-SCR T( CAN I II (2.* (V BR+F*F II
IF 'APF' IS 1.0, PROGRAI" CO~VERGES ON 'A't NOT 'AP'.
IF 'APF' 15 NOT 1.0, PRCGRA'" t.:CIWERGES eN 'AP', NOT 'A'.
l.
\..
IFIAPF.E~.I.1
GC TO ,dO
AP=VA~/'l.-vARI
GG TO 580
~15
VBR=SlGS·CY*CS2
VAR=S IGe.ex
IFI.'lAG.E'.11 .= 0 .0
IFIKFLAG.E'.ll (J TO 579
5/9
A=VBR/'F.SI~PHl*·2+VORI
IFIA'F.E~.l.1 GO TO 580
AP ~vAR/'F *SI~prl·COSPrl-V~RI
58..;
CONTINUE
IFIK'lAG.E'.jl (0 TO 58 1
IFIA.GT.O.51 '= 0 .5
\..
C
4J
IF,A.lT.(-O.511 A~-O.5
••••••• DAMPENING OF AXIAL AND
I TERA r IUNS.
58l CC:-.TINUE
A=IA+BETA)*.5
AP=IAP+DELTA) •• 5
89
~NGULA R
IN TE RFERENCE FACTOR
30
CC~TI~UE
C
••••••• T( ST FeR
c
CCNvERGE~CE
......
C
IF IAPf. EQ .I.1 GC TC 7e
1F(A ~S ( A ,",- DE LT A ).lE
•• OO ll
GC! TU 5C
GC TG IU
lC
C
10
•• OO l)
GC TO 50
PRI~T-OUT
IS
~EEJEO ,
CARDS ARE
INSE~TEO
HE
CC'TI'UE
KP=i:
WI'ITEIKP,79)
79
50
IF(A BS ( A -e E TAI.L~
"HEN SP(CIAl OIAGNCSr tC
~
f OR~A TI'J't2X,'~ALUE
OF
SlO~~CW~
FA CTUR , A
t
1S Nc r CONVERGED '/I
.... =IJ.S CR TI(fl.-AJ.COSSII*·i l2+(( l.+AP)*XU**2J
C Tl=( C .5.RHC*~·C)·'~.~)
Cf=CTl*RL·CX
TF=(Tl*CV*CO$SI
H~F=CH.CTl·CA**lIC
C
RETURN
END
CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
SUdRQU TINE TIPlCS(U,UC,F,C,GO,Hl,P(,R,Rl,PHI,RH)
C
C
C
L
c
•••••• TIPLC S - DfTERMINES THE TIP AND HuB LOSSES
UASEO UPU~ GCLDSTEIN'S THE ORY, CR PRANOTL'S THE OR Y,
OR FOR THE CASE OF NO LCSSES.
SU " 2;0. 0
SU~=u.o
AK= l.
A,... ~= l.
4"'= 0 .0
-;u b
LlJJ
IFIC.GT.2.01 GO TC ,66
IFIG O.EO. O.CI GO TO 200
I.I GO .E C.I. OI GC TO ID a
IFI GO .E Q.2. 01 GC TO •••
tF( GO .E Q.2. C) GC TO 444
CCI\T !f\ut:
F=IZ./PI ).AFic nSIEXP I-( Q*(R-RlJ )/(Z".Rl"'SJRTISINIPHI 1 •• 2 +. 000 l1 III
GO TO l OS
444
I CU
C
C
F=l. C
GO 10 IJ5
IfIiABSISINIPHIIII.LT •• OOOII GO TC 200
••••
GULDSTEINS MET.OO •••••••
C
00 101'4 =1,3
V=(Z.·AM+l.J
l O=UC*v
V2=~·V
I~U·v
lZ:L*l
610
CAll BE~SElll,v,At)
CAll 6cSSElIIQ,v,AtOJ
IFII.GE.J.5) GG TO ]00
A:s:Z.*Z.
8='4 .*4.
C=6.*6.
0",8.'-13.
T 1" l= 1Z I I A-" ZIt ( l 2 *Z2 J/ I , A- v2 J " ( s-v 2 I I + (lZ- - 3 ) I ( ( A- liZ J* ( O-V 2 J II C-" l ) I + ( Z2 •• 4 J/ ( (A-v Z I - ( ~- v2 1* (l. -v 2) .. ( J- VZ ) )
CT1~Z=(V*P[*A[I/(Z.-S[N(.5-V.Ptll
-TIVZ
GO TO 400
jJO
T03( U.U)/(1.+U*UJ
= *u *u'- ( 1. -u*u ) I ( ( 1. tU -u ).. *4 I
T4=lb •• U~ U *(1.-14 •• U.Ut21 •• U·*4 - 4.·U*.61/(11.+U-UI.-71
T6=64 •• U.U.(1.-75.*U.U+603 •• U.*4-1065 •• U.*6+460 •• U*.~- 36.*U-*10)
l/ie 1.+U-uJ-.IOl
CTIVZ=TOtTZ/VZ+T4/IVZ.·2)+T6/IVZ**JI
FVU=(u*UJ/(l.+U.U) - CTIVI
$UfII .. SUM+FVU/VZ
T 2 4.
4JU
1
If(AM.N~.C.OI GO TO 1
E=-O.098/(UC··.668)
IF(AM. NE. l.O) GO TO 2
<
E,0. 03 I/IUO'·1.285)
IFIAM.GTd.C) E'O.O
$UM2=$UMl+((UO*UU.AMM)/ll.+UO*UGJ - E).tAI/AIO)
A""'=AM+l.
AK=((l.*A~-1.)·AKJ/'2.·AM)
IJ
AM~=A~/(2 •• AM+l.J
G=IU*UI/Il. +U.UI-IB./IP I*PI I).SUM
CI~C=G-Il./PII'SU~2
F=( (l.tu*l.)/(l.;.lJ) l.llRe
C
L
HU8LOSS CALCULATICNS
L
1o,
IFIHL.E~.l.O)
GC TO 5CO
FI=I.C
GO TO 9UO
F 1= ( 2 .1 PI I .. AR eo S ( Ex P (-, c: .. ( Rl- RH ) II ( 2. "R H* SQFt T , SIN ( P Ht '" *2 +
I. uCC ll111
~co
F=F*F[
RE TLHN
END
LCLCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCLCCCCCCCCCCCCCCCCCCCCCCCCCCC
LCLCCCCCCCCCCCcCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC
50....
5UBROUTl~E
L
C
OESSElIZ,V,At)
••••••• aESSEL CALCULATES BESSEL
TIP LOSS MOCFL ••••••
S=c.O
AK..sO.O
C=I.
ulJ ~o
,(,= l f l C
0;' .2S*l.Z) ·-AI<
O=V+AK
811
FU~CTIDNS
fUR THE GOLDSTEIN
P~l.
TK 2 C-l.
IFITK.LE.O.CI GC TO 40
P=Q*TK*P
0=G-2.
GO TO 5
4J
E=P
S=B/'C*~}
+
S
AK=AK~l.
C=AK-C
)0
eChTINUE
AI:"
.S*Z).*VJ*S
~ETURN
E'O
SU~ROUT'NE
c
e
~
C
y = ALPHA*leO./~.1415g27
AALPHA = ABS(ALPHAl
X
C
,
NACAlXIRltRXtSltAlPHAtCl,CO,~1
THIS SUBRCUTINE CALCULATES LIFT AND DRAG COEfFICIENTS fOR THE NACA
23C24 HALF RCUGH AIRFOIL
AS A f~NCTICN Of THE ANGLE Cf ATTACK ALPHA (IN RADIANS).
= ABStYI
CC'TINUE
IFIS • • LT. X .A~O. X .ll.13.JCD ~ X/248.B-.01675
If(-9 • • LE. Y .ANC. V .lE. +8.JCO = -l.09050E-o*Y.·3 +7.19578E-;'V
***2
~2.26760E-4.X - ~9.99331E-3
IFI13 • • LE. X .ANC. X .LT.
160.JeD = 2. -
l.OB9-'1.51-AALPHA) •• 2
JF(16C • • lE. X .AND. X .LE. laO.JCO = 0.04 + 2.S*'AAlPHA-3.142'.«Z
l
L
4
C[NTI'uE
IFllO • • lE. X .AND. X .LE. to.lel =
* -5.47C84E-l*X +3.04822
C
IFI-12 • • LE. Y .AND. Y .LT. 10.lel
*Y.*7 +1.03975E-7*Y*.0
c
-1.25E-3.X~*3
=
+4.55953E-2*X**2
2.6461~E-IC*Y.*8
+2.39782E-8.
1-5.54091E-6*Y •• S -2.20717E-5*Y.-4 +J.11341E-4*Y**3 +4.59110E-4*'.·
*2 +8.26J6gE-2*Y +1.0057~E-l
C
C
IftI60 • • LT. X .ANC. X .LE. 172.SICL
= -.763
If1172.5 .LT. X .ANC. X .LE. IBC.ICL
=
C
c
IFtY .LT. -12.)CL
= -CL
812
.10173-x - 18.3114
.LCCCCCCCCCCCCCCC
C
~
~RITrE'"
SUBROUTINE I NCRc M
BY i\.
h ..... ENrZ
CCCCCCCCCCCCCCCCCCCC
~ND
CYRUS OSTA"ARI,
.,.SU,
J ULY 1919 •••
ADJUSTS AIRFOil COEFFICIEI'tTS FOR DEF LECTI ON Of SPO ILER S OR AILER I
SU~RCUTINE
PI::3.
I NCREM( Al P ~A, CL ,C J , CH ,CA, OA , CS , DS , C I
t415~3
Y=AlPhA-IBO./PI
C
e
CHO DEPENDS ON AI Rf OIL CA MB ER ~EAR TRi lLING EDGE.
THIS VA LUE GF CHO IS FOR I't ACA 230 ME~N LINE AILERONS ON LY)
CHC=-. 00 3S
CH=C.
DAR= DAOPI/IBO.
~SR=us*plIleo.
L
L
10
If(CA.EQ. O.I GO TO S
IILERCN IN[REMENT CALCULATIONS
CHECK f OR PCST STALL CO' D (T( O~
If(17 •• LT.Y.OR.Y.LT.-17.I GO TO lS
If(O •• LE.DA.ANO.CA.LE.60.IGC TO 10
If(-6 0 •• LE.CA.ANO.CA.LT.0.IGO TC IS
DCl=CA/C.'11.S*SIN(CARI-5.*SINfOARJ·SINCOAR))
~[GIN
DCC ·l.05·CA/C.SIN(O~K'.SlNIDAR)
CH=CA/C·ICHC-.O~42·Y-2 •• SIN'OAR'J
GO TO 20
15
DCL=CA/C.(11.5.S1~(OARJ+3.35.SI~(DAR).SINCDARJI
~CO=.65·CA/C·SJ N (OAR'·SINIOAR'
CH·CA/C*(CHC-.054Z*Y-2.*SIN(UARJI
,
L
c
iO
GC TO 20
If(CS.EQ.C.IGO TO JO
BEGIN SPOILE R INCRE_ENT CALCULATICNS
If(17.LI.Y. OR .Y.LT.-17.1GC TO 30
spelLER IS ASSUMEC INEFFECT IVE FOR PO ST-STALL CASES
OCL=-9.9·CS/C·SINIDSRI
DCD-.93*CS/C·SINIOSRI·SIN(DSRI
IF(0 •• LT.Y.AND.Y.LE.17.1C"=-(6.7-.IIS*Yl*CS/C*SIN( DSR I* SIN(DSRI
IF(-17 •• LE.Y.ANC.Y.lE.0.ICH·-(o.7-. 07S *YI'CS/C* SIN(OSRl- S IN(OSRI
CL.aCL+OCL
co"'c~
"
C
C
.. oco
I,jC 1G 30
CC~ TI NU E
CALC ULATE PCST-STALL CC~OITIONS FCR AILERCN
CCNVERT CL AND CD TO CN AND CC
C
C
NOR_AL FORCE COEfFICIENT:
C
CN'CL*COSIALPH~I.CO*SINIALP~AI
C
C
CHCR OwiSE fCRCE CCEFfICIENT:
L
CC"'CQ·CLS(AlPHAJ-CL·StN(ALP~A)
C
L
CALCULAT E
CCNTRIBUTIC~S
TG f ORW ARC ELEMENT
C
Cl\l ... (,.,..-tl.-CAIC)
CCI=CC*II.-(A/CI
B13
L
L
CALCULATe AILERCN CONTRIUUTIO.S
C
Cr-.:2=,i .27"2.*" I-SIN I ALPH~"C I'H II (4. +p
1.A,~SI
OC~A=C~l·CAIC*CCSIOARI
~CCA=CN2·CAIC·Slh(OARI
CH= - CN2I2 .
CN"'CN1+OCNA
CC=GCI'CCCA
C
L
C
CC'VERT TC LIFT AND CRAG COEFFICIENTS:
CL=CN'CGSIALPHAI-CC'SINIA LP>AI
Cc=CC*CaSIAlpnAI+CN · S[N ' AlP ~ AJ
~O
CCNTINUE
REIUR,
<NO
B14
SINI AlPHA+CARI J I
APPENDIX C
Annual Energy Calculations
The predicted annual energy output for fixed pitch wind turbines can be
increased by varying the aileron angle at wind speeds between cut-in and rated
power.
For the analysis here, rated power of the MDO-O turbine is assumed to
be 120 kW at the rotor shaft, wh,;ch will give about 100 kW of electrical power
from the generator.
The annual energy output is calculated for average wind
speeds of 12. 13. and 14 mph at a 30 ft heigh t which corresponds to average
speeds of 14.25. 15.44. and 16.63 mph at 100 ft hub height when a one-seventh
power law is used for the increase of wind speed with height.
Power output
was obtained f)'om the "PROP" computer program for various instantaneous wind
speed values.
Aileron settings of 0°. 2°, and 5° were used. and annual energy
integrations were done using 2 mph wind speed increments.
Smaller intervals of
wind speed and aileron angle could be used. but because of the variation of wind
speed and the response time of the system controlling the aileron angle it is
doubtful that the additional calculation ste ps would be j us tified .
Table CI shows the best aileron setting for instantaneous wind speeds
from 12 to 40 mph. and the power available for zero aileron and with best
aileron setting.
The left half of the table shows the number of hours annually
that the wind can be expected to be in each 2 mph interval for average wind
speeds of 12. 13. and 14 mph.
This latter information is obtained from an
assumed Rayleigh distribution for the wind speed.
to the rating of 120 kW shaft power.
C1
Maximum power is limited
Table CI - Best Aileron Setting, Maximum Power, and Hours
Annuall y for Various Hind Speeds
Instantaneous
Wind Speed
,
Power and Aileron Settings
Best
Power,
Maximum Aileron
No Ail eron
Power
Angle
Hours Annually
Average Wind
12 mph
13 mph
14 mph
860 hr
792 hr
846
797
794
768
12
35 . 2 kW
35.3 kW
930 hr
14
63.0
64.5
887
I
16
90.8
96.9
805
18
116.2
120.0
696
714
713
20
120.0
120.0
577
618
639
22
120 .0
120.0
459
516
554
24
120 . 0
120.0
351
I 416
465
26
120.0
120.0
259
324
380
28
120.0
120.0
184
245
I 301
30
120.0
120.0
126
179
I 232
32
120.0
120. 0
83
127
I
34
120.0
120.0
53
88
127
36
120.0
120 . 0
33
58
91
38
120.0
120 . 0
20
38
63
40
120 . 0
120.0
11
24
43
I
I
174
Total annua l energy is obtai ned from the i nformatio n contai ned in
Table CI by multiplying the number of hours in each wind speed range by the
power available for the mid- point speed, and summing over the entire year.
For wind speeds of 20 mph and greater with no aileron, and for speeds of
18 mph and greater with aileron, power is limited by the system rating of
C2
120 kW and optimization i s not possible.
Table CII shows resul ts of the annual
energy summations for average wind speeds of 12, 13 and 14 mph.
Table CII
- Annual Energy in
MWH
,
V = 13 mph
V = 12 mph
Instantaneous
Wind Speed
No
Optimum
No
Aileron
Aileron
Aileron
Optimum
Aileron
Aileron
Optimum
Aileron
12-1 8 mph
243
252
239
248
231
239
20 - 40 mph
259
259
316
316
368
368
502
511
555
564
599
607
I Tota 1 Energy
I
V = 14 mph
Increase
1.8%
1.6%
No
1.3%
The table shows that about 1.8% increase in annual energy is possible for
low average wind speeds, but only 1.3% gain i s available for an average wind
speed of 14 mph.
The amount of annual energy gained in this example is small,
and might not justify t he complexity of controlling the ailerons at wind speeds
below rated power.
However, there are two factors which should be further
invest igated befo re such a decision is made.
1.
These are :
The MDO-O is not well matched to a wind regime with average wind speeds
from 12 to 14 mph.
It spends a much larger percentage of ti me operating at
rated power than a machine properly designed for these \</ind speeds.
The MOO-OA,
a 200 kW machine with the same rotor diameter i s better matched to t he se wind
regimes and would probably show l arger annual energy gains than the MOD-D.
2.
The method used here for annual energy predi cti ons as sumes that the
wind ;s constant at each wind speed for the number of hours predicted by t he
Raylei gh dis t ribut ion.
In practice, the wind speed ; s contin uo us ly va ri able,
and the use of pitch control or aileron control to increase output depends upon
C3
the ability to sense wind speed at the rotor and the ability of the control
mechanism to follow the variations in this wind speed.
A wind speed model
which simulates these va riations and response times for the aileron control
could be developed to make more sophisticated estimates than those given here.
C4
APPENDIX D
HARDWARE DESIGN INFORMATION
General
The general configuration of the aileron control system was selected
based upon airplane flight control design experience. two-dimensional wind
tunnel research of aileron and spoiler control systems and performance studies
of the MOO-O wind turbine using the PROP computer program, with the airfoil
subroutine modified to accommodate aileron control characteristics.
From these
latter studies, it was determined that an aileron of 20% chord and 60 0 upward
deflection and with a span extending over the outer 30% of the rotor would
provide adequate overs peed protection.
From a hardware design point of view it ;s desirable to locate the aileron
hingeline near the airfoil upper surface rather than on the mean line for two
reasons.
First, when deflections of as much as 60° are to be used, the air·
foil surface forward of the aileron must be cut back to a position well forward
of the hingeline to clear the deflected aileron.
This clearance produces a
large gap in the airfoil surface when the aileron is in neutral position, which
is a source of added drag.
Second, the upper surface hinging allows maximum
moment arm inside the airfoil contour for attachment of the aileron actuating
mechanism.
On a straight· tapered blade of constant percentage thickness most para·
meters that need to be calculated can be stated in terms of local blade chords
which, in turn, depend upon blade stations
rotation).
D-I
(radial distance from the center of
The dimensional quantities given in this section of the report are in
English units rather than 5 . 1. units because of current fabrication practice.
In the calculations in the sections which follow. two aileron planform arrangements are considered.
For one planform the aileron extends from the 69.1 %
radius (518.34in . station) to the rotor tip. and for the second case the aileron
extends from 64.7% radius (485.00in . station) to the rotor tip.
studies show that either arrangement will be satisfactory.
Performance
The present design
loads analysis will also indicate that no criti cal loading situation will occur
for either geometric arrangement.
For the present pla nform geometry the local
blade chord is given by:
c
where
c
= local
x
~
=
7.05786 - .0867925x
(01 )
chord. ft.
local radial distance. ft.
Airload Hinge Moment
Data from several sources indicate that the maximum value of closing hinge
moment coefficient. ch. that can be expected with the aileron deflected up
(downwind) 60° will be less than 0.58.
To be conservative. a value of 0.58
will be used for the present design study.
Maximum hinge moment will occur when the angle of attack of the blade is
nearly 0°, i.e .• when rotational velocity is high and wind velocity is low.
In this case, resultant velocity on the blade outboard sections will come
almost entirely from rotational velocity and can be taken as v = XW.
A rotational
velocity of 40 rpm (4 .1 89 radians/sec) wi'l be used for design.
Measured along the upper surface from the hi nge 1; ne to the tra 11 i n9 edge.
the aileron chord is .1930 times local chord c.
the incremental airload hinge moment will be
0-2
Thus. at any blade station,
( 02 )
where
H
=
hinge moment
q
=
~P (",x) 2
c a = .193c
and c is 9iven by equation (01).
Using sea-level standard air density and 40 rpm, the following results
are obtained:
Inboard Aileron Station
H
2412
2808
in-lb
in-lb
51 8.34 in
485.00 in
Ai1 eron Wei ght
The flat-pattern area of sheet metal required to make the aileron skin at
any station is approximately .5557C per unit span.
Total skin weight is ca1 -
culated by integrating across the span of the aileron:
Ws =
where w
t
~
dAs
*
Jw* t * dX
(03 )
dx
specific weight of aluminum, 0.10 lb/ in 3
= skin
thickness, .020 in
dA s
(fi( = skin area per unit span = .557c
c
=a
linear function of x, from equation (01)
The sheet metal area required for a rib at any stati on is appro xi matel y
.765c for flanges plus .01240c 2 for the rib web.
weight. rib weight equals
0-3
Treating ribs as distributed
equal to the perpendicular dista nce between the hinge line and the line of action
of the centrifugal force through the local section c.g.
moments are calculated below.
The magnitude of these
Hinge mass is neglected since the moment arm is
so short.
For ribs. skin and trailing edge strip, the c.g. can be taken as being
.053c below (upwind of) the hinge line.
This is the dimension "d."
The direc-
tion of the hinge line. relative to the center-line of the steel tube spar of
the blade is .05066 radians.
The direction of the centrifugal force at the c.g.
of any aileron secti on relative to the spar center-line is approximately .6152
(e/r) radians.
Thus < : . 05066 + .6152(e/r) radians.
Multiplying the force component by its moment arm about the hinge line
and integrating over the aileron span
~ives :
He : j(w2)(X)(Sin £)(d)
E
is a small angle, so
E ~
sin
~~dX
(07)
E.
Substituting all values and integrating, the following results are
obtained:
Centrifugal Hinge Moment
Inboard Aileron Station
68.4 in-1b
75.2 in-1b
518.34 in
485.00 in
These values are much lower than the aerodynamic hinge moment .
Design of Centrifugal Force Drive System
Maximum airload hinge moment to be overcome
~
2808 in- lb.
To assure excess
capacity to drive the aileron to full up position, design for 2808 x 1.5
in-lb moment.
neglected for
=
The centrifugal moment produced by the aileron mass will be
conservati~~
in this analysis.
0-4
4212
Centrifugal Moment about Aileron Hinge line
Since centrifugal forces on incremental mass elements of the aileron act
neither through. nor parallel to, the aileron hinge line, these forces produce
moments about the hinge line as shown in the sketch below:
d
i-F c =
-w
-f
Hin~
c
mw~r
(e)
Hinge offset
l-
I
I
I
I
r
F
c
(b) Chordwise Centrifugal Fo rce
+
(a) Rotor and Centrifugal Force
Sketch 01 - Centrifugal Moment
The hinge moment at any station is the local centrifugal force times the
sine of the angle between the hinge line and a true radius, times a moment ann
0- 5
I
wr "
\'Ihere
f
dAr
W
(04)
* t * dx * dx
dAr
-dx -- rib area per unit span'" rib area/rib spacing
~:
= (.765c + .0120c 2 )/rib spacing
(The rib spacing in this case is 10 inches . )
Hinge and trailing edge strip will contribute about .027 lh/in.
etc . • are estimated to weigh about 1.0 lb total.
Rivets,
The total weight of one
aileron ;s given by:
Wtota1
=
W5 k'1" + Wrl'b 5 + wholnge+ TE + w.
rlve t S
Total Weight
Inboard Aileron Station
17.81b
518.34 in
21. 0 1 b
485.00 in
(05 )
Total Centrifu9al Force on Aileron
The total centrifugal force on the aileron is obtained by a span-wise
; ntegration:
Fe '"
where
~~
=
mass per unit span
=
fW 2x ~~dX
(06)
weight per unit span/g
Using the weight equations developed earlier for various components of the
aileron. and assuming "distributed lt rib mass as earl ier, the following resu1t
;s obtained for
w=
40 rpm.
Centrifugal Force
Inboard Aileron Station
511 1b
582 1b
518.34 in
485.00 in
0-6
Push rod moment arm about hinge line at full up aileron
Thus push rod load = 4212/3.05 = 1321 lbs.
=
3.05 in.
Pus h rod moment arm about bell
crank pivot is also 3.05 in.
Counter-balance mass c . g. has a moment arm of approximately 11 inches
when aileron is 60° up .
moment is 4212/ 11
=
Thus, the centrifugal force needed to supply 4212 in-lb
383 lbs.
The mass ;s located at x = 510 in.
Therefore the centrifugal load factor
at 4< rpm (4.1 89 rad /s ec) will be:
n =
xw'
(D8)
9
Substitut ing,
n =
23.18
The weight required will be
w = -F
n
w = 16.52 lb
Thus a centrifugal weight of this size will be able to overcome the aerodynamic hinge moment at 40 rpm and 60° up aileron with a 50% margin of safety,
and taking no credit for the centrifugal effect of the aileron mass.
Sizing the Hydraulic Cylinders
Moment arm of the actuating cylinder force to oppose the centrifugal
force will be approximately 3.9 inches with aileron up 60° .
Assuming (in the
extreme ) that w is still 40 rpm and airload hinge moment has fallen to zero,
the actuating cylinder load required to start the aileron down will be
(421 2/3.9)
=
1080 lbs.
If it is desired to produce this force with hydraulic pressure of 1000 psi
or less, net effective piston area of the activating cyl inder needs to be:
D-7
A= F
P
( D9 )
A = 1. 08 in 2
Assuming a piston rod diameter of 0.50 in. a piston diameter of 1.375 in
will be more than adequate.
Total piston travel available should be 5. 5 in.
The fluid volume change
associated with full travel will be:
( 010 )
Vol· 7.1 in'
Coordinating Aileron Deflection on the Two Blades
Because of physical constraints imposed by the confi 9urat i on of existing
MOO·O rotor design, it i s desirable that posit i on coordination between t he
a; 1erons on the
t'fIO
blades be aecamp 1; shed hy drau 1 i ca 11y ra t her t han by
mechanical interconnect between the two ai l erons as originally proposed.
Assuming identical actuating cylinders and ai l eron dr i ve l inkages in the two
blades, this requires some means af guaranteeing equal fluid volump flows
to or from the two actuating cylinders as aileron position is changed.
Since it is unlikely that loads in the two linkages will always be
the same even though aileron positions may be the same. maintaining equal
pressures in the two actuating cylinders wil l not sati sfy the equal vol ume
change requirement.
Thus,
merel~'
splitting t he fl ow from one pressure so urce
will not do.
One simple way to guarantee equal volumes is to use some such arrangement as that shown on sketch 02:
0-8
Actuating Cylinders
Equalizing Twin Master
Blade # 1
aileron
Cyl inder
..
\
\\
,.
Fluid
II
\L
\ \ \
1\ \ \ \
\'
\
I \1
Blade # 2
aileron
1
Sketch 02 - Hydraulics for Ailerons
This arrangement provides a closed hydraulic system for each blade. Two
identical master cylinders (shawn as two chambers in a single housing) are
driven by a single primary actuator.
The two master cylinders and the cylinder
that drives them constitute the unit labeled "mot;on equalizer assembly" on
the draw; ng.
Except for the effects of leakage, such an arrangement will keep positions
of the two slave cylinders coordinated even though pressures in the two systems
are different.
Since no hydraulic system can be absolutely leak - free, it seems
advisable to provide a means of supplying makeup fluid to each of the two closed
systems to compensate for small amounts of leakage.
Such a system would require
position sensors on each of the slave cylinders and on the motion equalizer
assembly .
When either slave cylinder position does not agree with equalizer
unit position within acceptable limits, an injector (perhaps solenoid actuator)
would inject a small amount of fluid into that system .
It is emphasized that the
proposed arrangement would compensate only for very low leakage rates.
gross leak would result in shutdown for repairs .
0-9
Any
All of the items described above could be mounted on the rotor.
If this
were done and the primary hydraulic supply were mounted on non-rotating structure, one fluid transfer gland on the rotor shaft and slip rings to supply power
for the injector systems would be required in addition to whatever slip rings
were needed for instrumentation and control circuits.
The primary supply system could also be rotor-mounted thus eliminating all
fluid transfer glands .
However, the number of slip rings probably would be
considerably increased if this were done.
It appears that means could be provided
to mount both the motion equalizer package and the pressure supply package on
the outside surface of the rotor hub . At 40 rpm and a radius of 2. 0 ft, centri fugal loads will be only 1.1 g.
It should be possible to mount all required
hardware well within a 2.0 ft radius.
Irrespect i ve of where the components are located, the hydraulic cylinders
will be sized as follows.
will be available.
The ful l area of the pistons in the twin master cylinder
Thus the diameter will be :
o
= /
~A.
(011 )
where A = 1.08 in 2 .
Thus
0=1.17in
Pressure in the single cylinder driving the twin master cylinders will be
essentially the same as in each of t he two driven cylinders if the single cylinder is made 1.75 inches in diameter.
be 5.5 x 1.75 2./4
=
Its total volume flo\.,.. requirement would
13.23 in 3.
To allow the ailerons to move quickly from normal operating position to
full up- position for emergency shutdown of the wind turbine, the line(s) from
the dump valve to reservoir must be designed to allow a high flow rate at low
pressure.
0- 10
Aileron Twi s t
Since the aileron actuation will take place at the inboard stati on, and
the aerodynamic hinge moment is distributed along the span, the aileron wi l l
be subjected to torsional loading.
The deflection in torsion (twist) is cal-
culated by analyzing the aileron as a thin-walled cylinder (non-circular ) .
The appropriate equation* is:
e
where T
=
J4A'T GtJ. dx
( D12 )
= applied torque per unit span
• = perimeter of thin-walled membe r
(aileron)
= cross-sectional area of aileron
G = elastic modulus in shear of aluminum
A
t
T,
i,
= skin thickness
(3.8 x 10' psi)
( . 020 in)
and A are all functions of local chard, which in turn depends on x.
analysis ignores rib and hinge contributions to torsional stiffness.
conditi on is aga i n the case of 40 rpm with 60° up ail eron.
This
The design
The "resu lts of thi s
analysis are given below:
Total Twist
Aileron Inboard Station
518.34 in
485.00 in
This amount of twist is considered to be quite acceptable.
Aileron Latching
A spring-loaded latching system i s proposed to hold the ailerons in full
up position once they have gone there.
Hydraul i c pressure would work against
* See "Advanced Mechan; cs of Hateri a 1s , " See 1y and Smi th , pub 1i shed by John
Hiley and Sons, or other appropriate reference.
D- ll
the spring for the subsequent re - start.
This could be accomplished by providing
for over-travel where the actuator cylinder is attached to the centrifugal mass
arm so that initial pi1ston motion when hydraulic pressure is re-applied will
release the latch and further motion will bring hte aileron toward the neutral
position.
On sudden loss of electrical load, the dump valve shown in the pressure
supply system schematic would be opened.
Overspeed and/or manual shutdown
signals also would be fed into the control for this valve.
The same signals
would be used to interrupt power to the pump drive motor.
Icing Problems
Possible solutions to icing problems with the rotor stationary would be
strategically placed electrical heating elements or a system to pump alcohol
or ethylene glycol into areas where ice has collected or may collect.
0-12
DESIGN SUMMARY
The design information ;s summarized as follows:
Aileron Material:
.020 in thick 2024T4 aluminum
(ribs and skin)
Aileron
Inboard Station
518 .34 in
458.00 in
17.8 lb
21 .0 1b
511 1b
582 lb
Centrifugal Hinge Moment:
(opening)
68 in- lb
74 in - lb
Aerodynamic Hinge Moment:
2412 in- lb
2808 in-lb
16.5 lb
19.2 lb
Actuator Force :
1080 lb
1257 lb
Piston Diameter:
(w/0 .5 in O. Shaft)
1.375 in*
1.375 in
5.5 in
5.5 in
Twin Piston Diameters:
1.17 in
1.17 in
Driving Piston Oiameter
1. 75 ; n
1. 75 in
Aileron
\~ei9ht:
(each)
Centrifugal Force:
(radial )
(clos ing )
Aileron Twist Under Maximum Moment:
Centrifugal Weight:
Hydraulics (1000 psi system)
Travel (mini mum)
Flow Equalizer:
* Thi s cylinder ;s slightly oversized to be a standa rd dimension.
0- 13
Note,
R=19.0Sm (62.Sft)
c/R
J
o
I
.192
.032
~
Variable Pitch Control
~/~~
1. 000
.647
x/ R
Leading Edge
.700
I
N
"
20% Chord Aileron
10% Chord Spoil e r
70% Chord Hinge line
Chord Lengths
x/R
.032
c/R
.192
1. 0960
1.0960
.647
1.000
.0640
.0333
Figure 1 - Blade Planform Geometry