Optimal control of a high-volume assemble-to-order expediting
advertisement

Queueing Syst (2008) 60: 1–69
DOI 10.1007/s11134-008-9085-6
Optimal control of a high-volume assemble-to-order
system with maximum leadtime quotation and
expediting
Erica L. Plambeck · Amy R. Ward
Received: 23 August 2007 / Revised: 15 August 2008 / Published online: 20 September 2008
© Springer Science+Business Media, LLC 2008
Abstract For an assemble-to-order system with a high volume of prospective customers arriving per unit time, we show how to set nominal component production
rates, quote prices and maximum leadtimes for products, and then, dynamically, sequence orders for assembly and expedite components. (Components must be expedited if necessary to fill an order within the maximum leadtime.) We allow for updating of the prices, maximum leadtimes, and nominal component production rates in
response to periodic, random shifts in demand and supply conditions. Assuming expediting costs are large, we prove that our proposed policy maximizes infinite-horizon
expected discounted profit in the high-volume limit. For a more general assembleto-order system with arbitrary cost of expediting and the option to salvage excess
components, we show how to solve an approximating Brownian control problem and
translate its solution into an effective control policy.
Keywords Assemble-to-order systems · Functional limit theorems · Diffusion
limits · Deadlines · Maximum leadtime quotation · Instantaneous control
Mathematics Subject Classification (2000) Primary 90B05 · 60F17 ·
Secondary 90B22 · 60J70
E.L. Plambeck
Graduate School of Business, Stanford University, 518 Memorial Way, Stanford, CA 94305-5015,
USA
A.R. Ward ()
Marshall School of Business, University of Southern California, Bridge Memorial Hall—BRI 401F,
Los Angeles, CA 90089-0809, USA
e-mail: amyward@marshall.usc.edu
2
Queueing Syst (2008) 60: 1–69
1 Introduction
Consumers would like to have products tailored to their individual preferences, but
they are impatient. Therefore manufacturers can gain competitive advantage by offering customizable products and delivering these products quickly. This feat is accomplished by designing a family of products that can be rapidly assembled from
various combinations of a relatively small set of modular components, in response to
customer orders.
This paper examines operations management in such an assemble-to-order system. The system manager first chooses a price and maximum leadtime to quote for
each product (which jointly determine the vector of mean demand rates for all products), and invests in production capacity for each component (which determines the
nominal rate of component production). Then, as the stochastic demand and component production processes are realized, the system manager dynamically controls
the assembly process (allocating scarce components among outstanding orders for
various products), and fine-tunes the production process (expediting component production at a high cost per unit or salvaging excess components for a low revenue per
unit). When shifts occur in the demand and/or production cost functions, the system
manager may re-set prices, maximum leadtimes and production capacity. The objective is to maximize expected discounted profit, subject to the constraint that every
customer’s order must be filled within the product-specific maximum leadtime.
The control problem is very complex, and cannot be solved exactly. We consider a high-volume asymptotic regime in which the arrival rate of prospective customers grows large (relative to the time horizon over which prices, maximum leadtimes and production capacity remain fixed). In that asymptotic regime, the optimal
prices, maximum leadtimes and component production capacity result in heavy traffic, meaning that demand for each component is nearly balanced with capacity. Then,
we are able to characterize system performance by a Brownian approximation with
dimension equal to the number of components (rather than the number of components
plus the number of products). We show how to numerically solve the approximating
Brownian control problem and translate the solution into a policy for dynamically expediting and salvaging component production and sequencing orders for assembly in
the original assemble-to-order system. For the case that expediting is expensive and
components cannot be salvaged, we prove that our proposed policy is asymptotically
optimal in the high-volume regime. Intermediate results in this proof provide heuristic motivation that our proposed policy will be effective in any assemble-to-order
system with high potential demand.
For a review of the operations management literature on assemble-to-order systems, we refer the reader to Song and Zipkin [34]. This literature takes the order
arrival process and component production capacity as given, does not allow for component expediting, and assumes that customer order assembly is FIFO. In the subset of this literature most closely related to our paper (Song [32], Lu, Song, and
Yao [22], Cheng, Ettl, Lin, and Yao [9], Song, Xu, and Liu [33], and Glasserman
and Wang [13]), the maximum leadtime and minimum fill rate (fraction of customer
orders that must be filled within the maximum leadtime) are exogenously specified
as policy constraints, whereas the remainder of the literature simply assigns a linear penalty for backorders. The focus of the operations management literature on
Queueing Syst (2008) 60: 1–69
3
assemble-to-order systems is on managing component production and inventory, and
for analytic tractability, each component is assumed to be managed independently,
without regard for the inventory positions of other components. Kushner [18] was the
first to study integrated control of component production in an assemble-to-order system. Our analysis is similar in spirit to his, in that we both consider an approximating
multidimensional Brownian control problem, but is more complete in that we prove
that optimal prices, maximum leadtimes and component production capacities result
in heavy traffic. We thus provide economic motivation for the Brownian approximation, through which integrated component control becomes tractable. In a companion
paper, Plambeck [26] incorporates transportation leadtimes for components, assumes
(unlike in this paper) that the time at which each customer pays is invariant with respect to the assembly policy, and proves that independent threshold control of each
component is asymptotically optimal.
Control of component expediting and salvaging in our assemble-to-order system
translates into instantaneous control in the Brownian control problem. Because the
directions of control are along the axes, we are able to apply the computationallyefficient method of Kumar and Muthuraman [17] to solve the Brownian control
problem. (If the system manager had to use admission control—rejecting customer
orders—rather than component expediting to avoid violating quoted maximum leadtimes, as in Plambeck, Kumar, and Harrison [27], the Brownian approximation would
exhibit instantaneous control at an oblique angle to the axis, and so the more general methods of Kushner and Dupuis [19] and Kushner and Martins [20] would be
required.) Other papers that incorporate expediting are the companion paper Plambeck [26] mentioned above, Lawson and Porteus [21] and Sethi, Yan, and Zhang [31]
in the context of single-item inventory management, Maglaras and Celik [23] in the
context of a single-server queue with dynamic pricing, and Cho and Meyn [10] in the
context of power networks.
The constraint that orders must be filled within a maximum leadtime provides
valuable flexibility to the system manager in choosing when to assemble which products. When all the necessary components are in stock, the system manager is able to
fill orders in strictly less than the maximum leadtime and thus collect revenue early.
We characterize conditions under which the flexibility inherent in maximum leadtime
quotation is extremely valuable.
In the case that customers are infinitely patient and the salvage value of all components is zero (so that leadtime quotation is irrelevant and no expediting or salvaging
occurs), the policy for setting static prices, component production capacity, and dynamically scheduling orders for assembly proposed in this paper is exactly the policy
proposed in Plambeck and Ward [28]. The reader may wish to review [28] to develop intuition, in that simplest of settings, for the optimality of heavy traffic and
the key insight that the assemble-to-order system dynamics can be approximated by
a Brownian motion with dimension equal to the number of components (rather than
the number of products plus the number of components).
The rest of the paper is organized as follows. In Sect. 2, we formulate our model.
Assuming that expediting is expensive and excess components cannot be salvaged,
we derive an upper bound on asymptotic profit in Sect. 3. We propose a control policy,
and prove that that proposed policy is asymptotically optimal in Sect. 4. We explain
4
Queueing Syst (2008) 60: 1–69
how to modify the proposed policy for systems with general expediting costs and
salvaging in Sect. 5. Finally, in Sect. 6, we consider systems in which the demand
and/or component production cost functions shift at random times, and the prices,
maximum leadtimes and component production capacity must change accordingly.
We conclude in Sect. 7. The proofs of all our results can be found in the Appendix.
2 Model formulation
We specify the evolution dynamics of our assemble-to-order system in Sect. 2.1.
In Sect. 2.2, we introduce the static planning problem (profit rate maximization in
a deterministic fluid approximation for our system). We specify our high-volume
asymptotic regime in Sect. 2.3. Finally, in Sect. 2.4, we introduce a perturbation of
the static planning problem that allows for a small imbalance in the demand and
production rate for each component, and is necessary for our asymptotic analysis.
2.1 The assemble-to-order system
Consider a system in which J different components are assembled into K different finished products (the assemble-to-order system in Fig. 1). Product k ∈ K ≡
{1, . . . , K} requires a positive, integer amount of the type j ∈ J ≡ {1, . . . , J } component equal to akj . Each component j is required for the assembly of at least one
product, so that for any j , akj > 0 for at least one k. Assembly is instantaneous, given
the necessary components.
At time t = 0, the system manager chooses the production capacity μj for each
component j ∈ J , and the price pk and maximum leadtime lk to quote for each
product k ∈ K. (Two “products” may consist of the same set of components, and differ only in price and maximum leadtime.) Given the vector of prices and maximum
Fig. 1 The assemble-to-order system. (Salvaging is incorporated as a decision variable in Sect. 5)
Queueing Syst (2008) 60: 1–69
5
leadtimes for all products (p, l), customers order product k according to a renewal
process Ok with rate λk (p, l). Specifically, Ok (t) denotes the cumulative number of
orders for product k that arrive before time t. A customer pays pk when his order for
product k is filled. Components of type j arrive at the assembly facility according to
a renewal process Cj with rate μj (the component j production capacity). Specifically, Cj (t) denotes the cumulative number of components that arrive before time t.
Each component has an associated unit production cost, cj > 0, paid upon the delivery of the component. A component of type j may also have a physical holding
cost per unit per unit time hj > 0. The component production capacity, price, and
maximum leadtime quotation decisions are irreversible, meaning that μ, p, and l are
fixed throughout the time horizon.
An order for product k must be filled within lk time units (and may be filled before
lk time units have passed). Assuming customer orders for each product are filled FIFO
within each product class, and letting Ak (t) denote the cumulative number of type
k orders assembled in [0, t], the constraint that orders are filled within the quoted
maximum leadtime can be expressed as
Ak (t) ≥ Ok (t − lk )
for all t ≥ 0 and k ∈ K.
(1)
To make (1) feasible, we assume that the system manager can immediately obtain an
extra unit of component j by paying an “expediting” cost xj > cj .
The system manager must dynamically sequence outstanding orders for assembly
and expedite components. The system manager may choose to fill an order in less than
the maximum leadtime, which generates early payment but risks using a component
needed to prevent future expediting. Specification of Ak determines order queues as
follows:
Qk (t) ≡ Ok (t) − Ak (t) ≥ 0,
k ∈ K.
(2)
When Xj is the cumulative number of components expedited up to time t, physical
inventory levels are
Ij (t) ≡ Cj (t) + Xj (t) −
K
akj Ak (t) ≥ 0,
j ∈J.
(3)
k=1
The shortage of component j is
Sj (t) ≡
K
akj Ok (t) − Cj (t) − Xj (t),
j ∈J,
(4)
k=1
which implies its representation in terms of queue-lengths and inventory levels is
Sj (t) =
K
k=1
akj Qk (t) − Ij (t),
j ∈J.
(5)
6
Queueing Syst (2008) 60: 1–69
The objective is to maximize expected infinite-horizon discounted profit E[],
where
≡
K ∞
pk e−δt dAk (t) −
k=1 0
J ∞
e−δt cj dCj (t) + hj Ij (t) dt + xj dXj (t) .
j =1 0
(6)
Customer payment occurs at the time of order fulfillment, but components must be
paid for at the time of their arrival. Therefore, an increase in component production
capacity tends to decrease expediting and delay in order fulfillment (revenue collection), but to increase the physical and financial costs of holding component inventory.
Because for any non-negative and non-decreasing process ,
s
∞
∞ ∞
∞
e−δt d(t) =
δe−δs ds d(t) =
δe−δs
d(t) ds
0
0
=
0
t
∞
0
δe−δs (s) ds,
0
where we have used Fubini’s theorem to justify interchanging the order of integration,
the definition of the queue-lengths and inventory processes in (2) and (3) implies
infinite-horizon discounted profit in (6) and can also be written in the following form
that is insightful and more convenient for analysis:
K
∞
J
=
δe−δt
pk Ok (t) −
cj Cj (t) dt
0
k=1
−
∞
e
0
−δt
K
k=1
j =1
δpk Qk (t) +
J
hj Ij (t) + δxj Xj (t) dt.
(7)
j =1
It follows that the financial holding cost per customer order in queue per unit time
is δpk .
An admissible policy u = (pu , lu , μu , Au , Xu ) specifies the product prices, quoted
maximum leadtimes, component production capacities, the sequencing rule for assembly, and the expediting rule for components. For a policy to be admissible, we
require that pu , lu and μu are non-negative, the processes Au and Xu are integervalued, non-decreasing, non-anticipating, have Au (0− ) = Xu (0− ) = 0, and satisfy
(1), (2) and (3). (In Sects. 5 and 6 below, we expand the space of admissible policies
to allow for salvaging of excess components and for the prices, maximum leadtimes
and component production capacities to change in response to random shifts in the
demand function λ(p, l) and component costs (c, x).)
For clarity of presentation, we do not subscript the system processes associated
with a particular policy whenever the policy under consideration is clear from the
context. We index products such that when there are two products i and k (i, k ∈ K),
with identical components aij = akj for all j ∈ J , the lower-indexed product has a
higher price pi ≥ pk and shorter maximum leadtime li ≤ lk .
Finding a policy that maximizes expected profit E[] for defined in (6) is
intractable. Therefore, we will perform an asymptotic analysis and search for a policy
Queueing Syst (2008) 60: 1–69
7
that maximizes expected profit asymptotically. The starting point of this analysis is to
find the maximum achievable profit when demand and component production occur
at their mean rates.
2.2 The static planning problem
Suppose that in setting p, l and μ, the system manager ignores the discrete and
stochastic nature of customer orders and component production, and simply assumes
that demand and production flow at their long run average rates. Then, to maximize
the profit rate, he solves the following static planning problem
π≡
max
p≥0,l≥0,μ≥0
K
pk λk (p, l) −
k=1
J
μj cj ,
(8)
j =1
subject to balance in the demand and production rate for each component:
K
akj λk (p, l) = μj ,
j ∈J.
(9)
k=1
We let (p , l , μ ) denote the solution to the static planning problem, and provide
sufficient conditions to guarantee uniqueness at the end of this subsection.
The optimal objective value in (8) upper-bounds the expected profit rate, which implies δ −1 π upper-bounds expected infinite-horizon discounted profit in the stochastic
system. Due to stochastic variability, sometimes components will be expedited to prevent violation of quoted leadtimes, and sometimes components will sit in inventory.
Hence the upper bound is not in general achieved. However, we will show that in
high-volume conditions, under an appropriate policy, the infinite-horizon discounted
profit is close to δ −1 π ; see Theorem 2.
Consumers tend to be averse to waiting for a product and instantaneous delivery
is free in the static planning problem (because it ignores stochastic variability). One
might therefore expect that with any realistic demand rate function λ(p, l), the optimal solution to (8)–(9) has zero leadtimes l = 0. This is true when consumers are
homogeneous in their tolerance for delay.
Example 1 Prospective customers arrive according to a Poisson process with rate λ
and have valuation vk for having product k immediately, where v = (v1 , . . . , vK ) is
drawn from a general joint distribution. Every prospective customer has the same
delay cost function f (l), regardless of which product she chooses, and will therefore
purchase a product that
max vk − f (lk ) − pk
(10)
k∈K
if the optimal objective value in (10) is non-negative, and otherwise make no purchase. We assume that f is non-decreasing and satisfies f (0) = 0, and let k ∗ (v)
denote the smallest k ∈ K that achieves the maximum in (10). Then, the demand rate
function
λk (p, l) = λP k = k ∗ (v) and vk − f (lk ) − pk ≥ 0
8
Queueing Syst (2008) 60: 1–69
K
˜
has the property that K
k=1 pk λk (p, l) ≤
k=1 p̃k λk (p̃, l) for any price and leadtime
˜ with l˜k = 0,
vector (p, l) with lk > 0 and alternative price and leadtime vector (p̃, l)
˜
p̃k = pk + f (lk ), and for i = k p̃i = pi and li = li . It follows immediately that the
static planning problem has an optimal solution with lk = 0 for all k ∈ K.
However, it is possible to construct a reasonable demand rate function such that
the optimal solution to (8)–(9) has positive leadtimes lk > 0 for a strict subset of
products in K. Consider the following example from Afeche [1].
Example 2 Suppose that J = 1 so that products may be differentiated only by price
and leadtime. Prospective customers are of two types. A type 1 customer’s valuation
for a product with zero maximum leadtime is drawn from a uniform [0, 1] distribution, and it decreases linearly with the maximum leadtime, with slope w1 ≡ 1.
A type 2 customer’s valuation for a product with zero maximum leadtime is drawn
from a uniform [0, 1/2] distribution, and it decreases linearly with the maximum
leadtime, with slope w2 = 1/4. Customers of each type arrive at rate 1. To maximize
the profit rate, it is sufficient to offer only two products, with prices and leadtimes
chosen such that customers of type 1 prefer product 1 and customers of type 2 prefer
product 2:
(11)
pi + wi li ≤ pj + wi lj for i, j ∈ {1, 2} and i = j.
Then a type i ∈ {1, 2} customer having valuation v buys product i if and only if
v − pi − wi li ≥ 0
and the demand rate for product i is
λi (p, l) = 1 − Fi (pi + wi li ) ,
where
F1 (v) = v,
0 ≤ v ≤ 1 and F2 (v) = 2v,
0 ≤ v ≤ 1/2.
Therefore, the static planning problem reduces to
π=
max
p≥0,l≥0,μ≥0
p1 λ1 (p, l) + p2 λ2 (p, l) − μc
subject to the incentive compatibility constraint (11) and
λ1 (p, l) + λ2 (p, l) = μ.
When c < 3/7, the unique solution is
p1 =
10 15
+ c,
23 23
p2 =
9
6
+ c,
23 23
l1 = 0,
which implies that
13 15
− c > 0,
23 23
21
9
λ2 (p , l ) =
− c > 0.
23 23
λ1 (p , l ) =
l2 =
6
4
+ c,
23 23
Queueing Syst (2008) 60: 1–69
9
Then,
π = (p1 − c)λ1 (p , l ) + (p2 − c)λ2 (p , l )
2
1 =
184 − 506c + 414c2 .
23
Motivated by Example 2, our model formulation allows for products i and k to
be physically identical (aij = akj for all j ∈ J ) and differ only in quoted price and
maximum leadtime. In effect, the system manager may offer a discount to consumers
that are willing to accept a long leadtime. The key characteristic of the distribution of
consumer preferences in Example 2 is the strong positive correlation between impatience and willingness to pay a high price. Existing literature shows that this positive
correlation is necessary for price discrimination through leadtime differentiation to be
profitable (see, for example, Afeche [1], Katta and Sethuraman [16], Maglaras and
Celik [23], Plambeck [26]), which corresponds in our model to the solution of (8)–(9)
having lk > 0 for a strict subset of products in K. For convenience in presentation,
we will assign indices to products such that
lk = 0
for k ∈ K0 ≡ {1, . . . , K0 }
and lk > 0
for k ∈ K\K0
(12)
for some positive integer K0 ≤ K. (Note that for a given set S and subset S0 ⊂ S, we
/ S0 }. If S0 = S, then S\S0 is the empty
use the notation S\S0 ≡ {s ∈ S such that s ∈
set.)
Commonly, as discussed above, any solution to the static planning problem in
(8)–(9) must have l = 0, which is equivalent to K0 = K. Then, the following standard assumptions on the demand rate function ensure that the solution to the static
planning problem in (8)–(9) is unique. Let λ(p) ≡ λ(p, 0). First, assume λ(p) is
continuously differentiable, and the Jacobian matrix [∂λk /∂pm ]k,m=1,...,K is invertible everywhere. Second, assume customer demand for any one product is strictly
decreasing in the price of that product, but is non-decreasing in the price of different products, so that ∂λk (p)/∂pk < 0 while ∂λk (p)/∂pm ≥ 0, m = k. Third, assume
K
m=1 ∂λk /∂pm < 0 for each k = 1, . . . , K, which means that demand for each product decreases when
all products’ prices increase by the same amount. Finally, assume
the revenue rate K
k=1 λk pk is strictly concave. Then it follows from Lemma 3.1 in
Plambeck and Ward [28] that there is a unique optimal solution to the static planning
problem (p , l = 0, μ ), which satisfies
pk >
J
cj akj > 0 for all k ∈ K
and μ > 0.
(13)
j =1
Let us impose the natural assumption in Example 1 that the product valuation
vector v has a joint probability density function with invertible Jacobian matrix. Then
Example 1 satisfies the conditions in the previous paragraph. Example 2 also has
a unique solution to the static planning problem, which satisfies (13), even though
l2 > 0. In the remainder of the paper, we will assume that the static planning problem
in (8)–(9) has a unique solution that satisfies (13).
10
Queueing Syst (2008) 60: 1–69
2.3 The high-volume asymptotic regime
Our analysis considers a sequence of systems, indexed by n = 0, 1, 2, . . . . Order arrival rates tend to infinity in a manner that preserves the structure of the demand
functions, as follows:
λnk (p, l) ≡ nλk (p, l),
k ∈ K.
Component production rates in the nth system are
nμn .
The renewal processes O1 , . . . , OK and C1 , . . . , CJ are defined in terms of the
K + J independent sequences of mean 1 non-negative random variables {zk (i), i =
2 and σ 2 , re1, 2, . . .}, k ∈ K and {yj (i), i = 1, 2, . . .}, j ∈ J having variances σO,k
C,j
spectively. Specifically, for any t ∈ m
n
n n n
zk (i) ≤ λk (p , l )t
and
Ok (t) ≡ max m ≥ 0 :
Cjn (t) ≡ max
m≥0:
i=1
m
yj (i) ≤ nμnj t
(14)
.
i=1
We assume that E|zk (1)|2+2
1 < ∞, k ∈ K and E|yj (1)|2+2
1 < ∞, j ∈ J for
1 > 0.
Note that λn is an order n quantity but μn is an order 1 quantity. Henceforth, when
we wish to refer to any process or other quantity associated with the assemble-toorder system having order arrival rate functions λn , we superscript the appropriate
symbol by n.
An admissible policy refers to an entire sequence, u = (pun , lun , μnu , Anu , Xun ), that
specifies an admissible policy, as defined in the second to last paragraph of Sect. 2.1,
for each n. Our objective is to specify a policy having associated expected infinitehorizon discounted profit that is in some sense close to the maximum achievable
profit nδ −1 π in high volume. Note that since arrival and component production rates
are of order n, the expected profit will be as well. Define
˜n=
n − nδ −1 π
,
√
n
(15)
˜ n ≤ 0 in high volume.
and note that Definition 1 A policy is said to be asymptotically optimal if it is admissible,
˜ n ] > −∞, and
lim infn→∞ E[
n
n
˜ ≥ lim sup E ˜u
lim inf E (16)
n→∞
for any other admissible policy u.
n→∞
Queueing Syst (2008) 60: 1–69
11
In high volume, any asymptotically optimal policy has prices, maximum leadtimes, and component production rates that converge to the solution of the static
planning problem in (8)–(9).
Proposition 1 Any asymptotically optimal policy has
pn → p ,
ln → l,
and μn → μ ,
as n → ∞.
Finally, we require the following standard technical specifications. Let (, F , P )
be a probability space. For each positive integer i, let D i be the space of all functions
ω : [0, ∞) → i that are right continuous with left limits. Consider D i to be endowed with the usual Skorohod-J1 topology, and let M i denote the Borel σ -algebra
on D i associated with this topology. All stochastic processes in this paper are measurable functions from (, F , P ) into (D i , M i ) for the appropriate dimension i. For
a sequence of stochastic processes {ξ n }, each of dimension i, the notation “ξ n ⇒ ξ ”
means the probability measures induced by ξ n on (D i , M i ) converge weakly to the
probability measure induced by ξ on (D i , M i ).
2.4 The perturbed static planning problem
The static planning problem does not account for variability. Furthermore, although
we know from Proposition 1 that any asymptotically optimal policy has p n → p ,
l n → l , and μn → μ , we do not know anything about the convergence rate. Hence,
due to stochasticity in demand and component production, we will want to consider policies with prices, maximum leadtimes, and component production rates that
slightly deviate from (p , l , μ ). This leads us to consider a perturbed static planning problem, in which there can be an imbalance in the demand rate and production
rate for each component, and strictly positive maximum leadtimes for products that
have zero maximum leadtime in the solution to the static planning problem.
π(θ, l) ≡ max
p≥0,μ≥0
K
pk λk (p, l) −
J
μj cj ,
(17)
j =1
k=1
subject to the perturbation θ in the balance between demand and production rate for
each component
K
akj λk (p, l) − μj = θj ,
j ∈J,
(18)
k=1
and the lower bound on maximum leadtime quotations
lk ≥ l k ,
k ∈ K0 for l > 0.
(19)
We again assume the indexing satisfies (12). Observe that the optimal objective value
in the perturbed static planning problem π(θ, l) is a strictly increasing, linear function
12
Queueing Syst (2008) 60: 1–69
of the capacity imbalance θ , and is a decreasing, possibly nonlinear function of the
maximum leadtime perturbation l.
We require knowledge about the behavior of the perturbed static planning
problem
n , l n ) that satisfies √nθ n → θ
when
θ
and
l
are
small.
In
particular,
for
a
sequence
(θ
√
n n
and nl n →
√ l as n → ∞, it is useful for us to know the nconvergence rate of π(θ , l )
˜ in (15).
to π . The n scaling is motivated by the scaling for If l = 0 and the standard assumptions
on
the
demand
function given in the para
graph before (13) are satisfied, then K
p
λ
(p,
l)
is
differentiable
at the optimum
k=1 k k
and maximum leadtimes l = 0. It follows that for a sequence (θ n , l n ) havprices
p
√
√
ing nθ n → θ and nl n → l as n → ∞,
J
K
√ n n
n π θ ,l − π =
cj θ j −
bk l k ,
lim
n→∞
where
bk = −
K
j =1
m=1
pm
−
J
amj cj
j =1
(20)
k=1
∂λm (p , 0)
∂lk
for all k ∈ K.
(21)
When customers have heterogeneous preferences, as in Example 2, the revenue function may not be differentiable at the optimum prices and leadtimes, because the arrival
rate function may not be continuous. To see this, observe that p1 − p2 = l2 − l1 in
Example 2, so that the incentive compatibility constraint (11) is binding for type 1
customers, and a small change in the prices or leadtimes such that p1 − p2 > l2 − l1
will shift all orders from type 1 customers from product 1 to product 2. Our analysis
must allow for such discontinuities in λ(p, l). This motivates an assumption analogous to (20).
√
Assumption
1 Consider a sequence of perturbations (θ n , l n ) that satisfy nθ n → θ
√ n
and nl → l as n → ∞. There exists a unique b > 0 that does not depend on either
θ or l such that
K0
J
√ n n
lim n π θ , l − π =
cj θ j −
bk l k .
n→∞
j =1
(22)
k=1
Assumption 1 provides information about small perturbations in the static planning problem. In addition, we require an upper bound on the profit-impact of larger
perturbations.
Assumption 2 For any finite > 0, there exist multipliers mk > 0, k ∈ K0 , such that
π(θ, l) ≤ π +
J
cj θ j −
j =1
for all 0 ≤ l k ≤ , k ∈ K0 , and |θj | ≤ , j ∈ J .
K0
k=1
mk l k ,
Queueing Syst (2008) 60: 1–69
13
Example 1 satisfies (20)–(21), and therefore satisfies Assumptions 1 and 2 with
mk = bk as defined in (21), for all k ∈ K.
Example 2 satisfies Assumptions 1 and 2. Specifically, the perturbed static planning problem
π = max p1 λ1 (p, l) + p2 λ2 (p, l) − μc
p≥0,μ≥0
subject to
λ1 (p, l) + λ2 (p, l) = μ + θ,
p 1 − p2 ≤ l 2 − l1 ,
1
p2 − p1 ≤ (l1 − l2 ),
4
l ≤ l1
has solution
p1 (θ, l) = p1 −
l1 (θ, l) = l,
11
l,
23
p2 (θ, l) = p2 −
l2 (θ, l) = l2 +
2
l,
23
14
l.
23
In the case that c = 1/10, π = 0.26435, and
π(θ, l) = π − 0.5l + 0.261l 2 +
1
θ.
10
n n
To see
Assumptions
√ that
√ 1n and 2 are satisfied, note that for any sequence (θ , l ) such
n
that nθ → θ and nl → l as n → ∞,
√ n n
1
n π θ , l − π → −0.5l + θ.
10
Furthermore, since the linear term in the expression for π (θ, l) is negative, there
exists a multiplier m such that
π(θ, l) ≤ π +
1
θ − ml
10
for all small enough θ and l.
3 An upper bound on expected profit
We define the regulated Brownian motion that approximates the shortage process
under any candidate asymptotically optimal policy in Sect. 3.1, and use this approximation to construct an upper bound on expected profit in Sect. 3.2. In Sect. 3.3, we
calculate the upper bound explicitly in two simple examples. Finally, in Sect. 3.4, we
examine the degradation in expected profit when the system manager is no longer
allowed to fill an order in strictly less than the quoted maximum leadtime.
14
Queueing Syst (2008) 60: 1–69
3.1 The Brownian approximation
In high-volume assemble-to-order systems, heavy traffic arises from optimal capacity,
price and maximum leadtime quotation decisions. The following proposition establishes this insight. Let
θjn ≡
K
akj λk p n , l n − μnj ,
j ∈J
(23)
k=1
be the capacity imbalance rate in the supply and demand for component j .
Proposition 2 Any asymptotically optimal policy has
√
√
lim sup n|θ n | < ∞ and lim sup nlkn < ∞,
n→∞
n→∞
for all k ∈ K0 .
From Proposition 2, we can restrict attention to policies in which the capacity
imbalance θ n in (23) satisfies
√ n
nθ → θ as n → ∞,
(24)
for some θ ∈ J . Then, the functional central limit theorem and the Cramer–Wold
device
that the scaled imbalance in demand and supply of components
K dictate
−1/2 (O n − C n ) behaves in high volume as a J -dimensional Brownian
a
n
k=1 kj
k
j
motion B with drift rate θ and covariance matrix having (i, j )th entry
ij ≡
K
2
2
aki akj λk σOk
+ μj σCj
1{i = j }.
(25)
k=1
Because expediting is expensive, it should be used only as necessary to assemble
customer orders within the quoted maximum leadtime. Therefore, under any asymptotically optimal policy, the shortage process defined in (4) can be approximated by
a regulated Brownian motion (RBM). In this approximation, the shortage process
is regulated by expediting to remain in a region determined by the maximum leadtimes. Note that although the component shortage process (4) is entirely determined
by the primitive processes of order arrivals O and component production C and the
expediting process X, the assembly policy A can influence the shortage process indirectly, through the expediting process. The RBM approximation relies on the system
manager adopting an intelligent assembly policy that enables him to use the minimal
amount of expediting.1
To characterize this RBM more precisely, let us first consider the case that the
solution to the static planning problem has lk = 0 for all k ∈ K, as for the class of
1 In an example with K = 2 products having a common component, if the system manager foolishly assembles all orders for product 1 while allowing the queue of orders for product 2 to build up to its limit (26),
then he may be forced to expedite the common component to avoid violating the maximum leadtime for
product 2, even though the shortage process is strictly below its limit in (27).
Queueing Syst (2008) 60: 1–69
15
problems detailed in Example 1. Proposition 2 suggests that in the nth system, the
system manager should quote a maximum leadtime
l
lkn = √k
n
√
where l k is a non-negative constant for each product k ∈ K. To understand the 1/√n
scaling of maximum leadtimes in (32), note that queue-lengths will be of order n
because that is the size of the imbalance in the demand and supply of components,
discussed above. Furthermore, by Reiman’s “snapshot principle” [30], the leadtime
for a product-k
Qnk (t)/λnk (p n , l n ), which is
√ order placed at time t is approximately
n
n n
n n
of order 1/ n due
√ to the scale of the demand rate λk (p , l ) = nλk (p , l ). This
motivates the 1/ n scaling of maximum leadtimes in (32). Note that the difference
between the actual and maximum leadtimes is very small and will often be zero.
Regarding the region in which the shortage process and its RBM approximation
must be contained, Reiman’s “snapshot principle” implies that for large n, satisfying
the maximum leadtimes in (32) requires Qnk (t)/λnk (p n , l n ) ≤ lkn , or, equivalently,
Qnk (t)
√ ≤ λk p n , l n l k ,
n
(26)
for all k ∈ K. Substituting (26) into the expression (5) for the shortage of component
j establishes that
K
K
Sjn (t) Qnk (t) akj √ ≤
akj λk p n , l n l k .
√ ≤
n
n
k=1
(27)
k=1
Corresponding to the right-hand side of (27) in the limit as (p n , l n ) → (p , l ) under
any asymptotically optimal policy, define
sj =
K
akj λk p , l l k .
(28)
k=1
Also define B to be a J -dimensional Brownian motion with drift rate θ and covariance matrix given in (25) and suppose that (Sθ,l , Xθ,l ) jointly satisfies
Sθ,l (t) = B(t) − Xθ,l (t) ∈ S ≡ (−∞, s 1 ] × · · · × (−∞, s J ],
(29)
∞
Xθl non-decreasing, and
s j − Sθ,l,j (t) dXθ,l,j (t) = 0,
Xθ,l (0) = 0,
0
j ∈J.
(30)
In words, the condition (30) requires that the limiting expediting process Xθ,l,j increases only at times when Sθ,l,j = s j and is therefore the minimal amount of expediting required to maintain the limiting shortage process Sθ,l,j below the level s j
and thus to avoid violating the maximum leadtime for a product that requires component j. We expect that for a given l and θ , the shortage process and expediting
16
Queueing Syst (2008) 60: 1–69
process can be approximated by
Sn
√ ≈ Sθ,l
n
and
Xn
√ ≈ Xθ,l ,
n
(31)
and show in Sect. 3.2 how to optimally choose θ and l.
In the alternative case that the optimal solution to the static planning problem has
lk > 0 for at least one product k ∈ K\K0 , as in Example 2, the system manager quotes
a maximum leadtime
l
lkn = √k
(32)
for all k ∈ K0 ,
n
and can quote lkn = lk for all k ∈ K\K0 . The approximation for the shortage process
remains the same, except that the bound (28) is infinite for any component used in a
product k ∈ K\K0 . Specifically, we need only modify the definition of s j to
sj ≡
K0
k=1 akj λk (p , l )l k
∞
if akj = 0 for all k ∈ K\K0 ,
if akj ≥ 1 for some k ∈ K\K0 ,
(33)
and the approximation (31) holds, with (Sθ,l , Xθ,l ) defined as in (29)–(30). The operational implication is that a component j used in a product for patient customers
(i.e., for which akj ≥ 1 for some k ∈ K\K0 ) is never expedited in the limiting RBM
approximation. To see why expediting is unnecessary, recall that under any asymptotically optimal policy, the maximum leadtime for each product k ∈ K\K0 intended
for patient customers satisfies lkn → lk > 0. When demand exceeds nominal production of component j , the system manager can allocate units of component j to filling
orders for products k ∈ K0 within their short maximum leadtimes, while holding a
queue of orders for the products k ∈ K\K0 with akj ≥ 1 targeted to patient customers.
√
As discussed in the previous paragraph,
the resulting queue will be of order n and
√
leadtimes will be of order 1/ n for those products, even with zero expediting of
component j . It follows that in the nth system for large n, under any asymptotically
optimal policy, actual leadtimes for a product k ∈ K\K0 targeted to patient customers
will consistently be strictly lower than the quoted maximum leadtime. Hence implementation issues might arise if prospective customers could obtain information about
actual leadtimes; we address this in Sect. 3.4.
Finally, note that in both the cases that lk = 0 for all k ∈ K, and that lk > 0 for
at least one product k ∈ K\K0 , Theorem 1 in Dai and Williams [12] guarantees the
existence of a unique solution to (29)–(30).
3.2 The upper bound
We first write the diffusion-scaled profit function in (15) in terms of the diffusionscaled and centered processes
n n
√ Okn (t)
n
Õk (t) ≡ n
− λk p , l t , k ∈ K,
(34)
n
Queueing Syst (2008) 60: 1–69
C̃jn (t)
17
√ Cjn (t)
n
− μj t ,
≡ n
n
j ∈J
(35)
and the diffusion-scaled processes
K
Sjn
√
S̃jn ≡ √ =
akj Õkn (t) − C̃jn (t) + nθjn t − X̃jn (t),
n
j ∈J,
(36)
k=1
Xn
X̃ n ≡ √ ,
n
(37)
Qn
Q̃n ≡ √ ,
n
(38)
In
I˜n ≡ √ .
n
(39)
Then, it follows that
˜n=
∞
δe
−δt
0
K
pkn Õkn (t) −
k=1
J
cj C̃jn (t)
dt
j =1
K
J
n n √ −1 n
n
pk λ k p , l −
cj μj − π
+ nδ
j =1
k=1
−
∞
e
−δt
0
K
δpkn Q̃nk (t) +
J
n
n
hj I˜j (t) + δxj X̃j (t) dt .
(40)
j =1
k=1
˜ n ]. The following
We use the representation (40) to obtain an upper bound on E[
n
˜
lemma shows that the first term in the expression for E[ ] in (40) converges to 0.
Lemma 1 Under any policy u with pun → p and μnu → μ
k ∈ K and j ∈ J
∞
∞
n
and
e−δt sup Õu,k
(s) dt, n ≥ 0
e−δt sup
0
0
0≤s≤t
0≤s≤t
as n → ∞, for each
n
C̃ (s) dt, n ≥ 0
u,j
are uniformly integrable families. Furthermore, as n → ∞, for each k ∈ K and j ∈ J
∞
∞
−δt n
E
e Õk (t) dt → 0 and E
e−δt C̃jn (t) dt → 0.
0
0
˜ n ] in (40), because for every n
For the second term in the expression for E[
K
k=1
J
pkn λk p n , l n −
cj μnj ≤ π θ n , l n ,
j =1
18
Queueing Syst (2008) 60: 1–69
Assumption 1 implies that for any policy satisfying (24) and (32),
K
J
K0
J
n n √ −1 n
n
−1
lim sup nδ
pk λ k p , l −
cj μj − π ≤ δ
cj θ j −
bk l k .
n→∞
j =1
k=1
j =1
k=1
To asymptotically upper-bound the third term in (40), we require a linear program
that can be used to find the queue-lengths and inventory levels that asymptotically
minimize instantaneous holding costs for a given value of the shortage process and
given upper bound on queue-lengths. Let (q , i )(S, L) solve
min δ
Q≥0,I ≥0
K
pk Qk +
J
(41)
hj Ij
j =1
k=1
subject to
Ij ≡
K
akj Qk − Sj ≥ 0,
(42)
k=1
Qk ≤ Lk ,
k ∈ K0 .
(43)
The objective function (41) follows from the third term in the representation for
diffusion-scaled infinite-horizon discounted profit in (40). Constraint (42) follows
because inventory levels must be non-negative. When
Lk = λk p , l l k , k ∈ K 0 ,
(44)
constraint (43) follows from the upper bound on queue levels in (26) required to fill
orders within the quoted maximum leadtime.
Any asymptotically optimal policy has p n → p by Proposition 1. Furthermore,
recall from Sect. 3.1 that for any sequence of capacity imbalances θ n satisfying (24)
and leadtimes l n satisfying (32), when the cost of expediting is high, so that expediting as few components as possible is desirable, we expect that
S̃ n ⇒ Sθ,l
Therefore,
lim inf E
n→∞
∞
e
−δt
0
K
and X̃ n ⇒ Xθ,l ,
δpkn Q̃nk (t) +
as n → ∞.
J
hj I˜jn (t) + δxj X̃jn (t) dt
≥ H(θ, l),
j =1
k=1
where
H(θ, l) ≡ E
∞
e
−δt
δ
0
+ δxj Xθ,lj (t)
K
k=1
.
J
hj ij Sθ,l (t), L dt
pk qk Sθ,l (t), L dt +
j =1
(45)
Queueing Syst (2008) 60: 1–69
19
The discussion in the last several paragraphs suggests that
n
˜ ≤ D(θ, l)
lim sup E n→∞
for
D(θ, l) ≡ δ
−1
J
cj θ j −
j =1
K0
bk l k − H(θ, l).
(46)
k=1
The first term in (46) represents the profit differential associated with the static decisions of price, component production capacity and maximum leadtime, while the
second term, H(θ, l) in (45), accounts for costs associated with dynamic assembly
and expediting decisions. These two terms have in common the imbalance in demand and supply for each component θ and the maximum leadtimes l for products
intended for impatient customers. Reducing the static capacity investment for component j translates to increasing the drift θj in the Brownian approximation, which
increases the dynamic costs associated with queue-lengths and expediting. Such a reduction simultaneously reduces expenditure on component production capacity and
physical component inventory holding costs. Increasing the maximum leadtime for
any product k ∈ K0 translates to increasing l k in the Brownian approximation, which
reduces expediting costs but also reduces the expected revenue rate and increases the
costs associated with having order backlogs and holding component inventory.
Define
max
D(θ, l) .
(47)
= θ ∈ J , l ∈ +,K0 : D(θ , l ) =
θ∈
J ,l∈
+,K0
Theorem 1 Assume the set is nonempty. If
J
−1
−1
akm hm
xj > max akj pk + δ
k:akj >0
and (θ , l ) ∈ , then
for all j ∈ J ,
(48)
m=1
n
˜ ≤ D θ , l .
lim sup E n→∞
We expect the function D(θ, l) to be concave, and so to have a finite maximum.
Then, there is exactly one element in the set , (θ , l ). In general, (θ , l ) must
be computed numerically. However, in very simple examples, it can be computed
analytically. We show how to do this in Sect. 3.3.
Any policy that asymptotically achieves the upper bound D(θ , l ) in Theorem 1
also has queue-lengths and inventory levels that are asymptotically determined by
the functions q and i operating on the shortage process. In Sect. 4, we propose
a policy that asymptotically achieves the upper bound D(θ , l ), which implies that
any asymptotically optimal policy must achieve the upper bound D(θ , l ). Hence
the dimensionality of the system state is reduced to J (the dimension of the shortage
process) under any asymptotically optimal policy. As assemble-to-order systems are
20
Queueing Syst (2008) 60: 1–69
designed to support a large number of products K with relatively few components J ,
this reduction in dimensionality greatly facilitates characterization of system performance.
3.2.1 The implications of the high expediting cost assumption
We employ the lower bound (48) on the cost of expediting in the proof of Theorem 1 to ensure that an asymptotically optimal policy will expedite only as many
components as are necessary to fulfill the quoted maximum leadtimes, and no more.
(If expediting were extremely cheap, it would be optimal to expedite more components and fill orders in less than the maximum leadtimes, in order to realize revenue
early. In practice, expediting is unlikely to be so cheap that it is used simply to realize
revenue early, and in this sense the lower bound (48) is not restrictive.) The lower
bound (48) is sufficient but not necessary for our proposed policy to be asymptotically optimal. In Sect. 5, we explain how to adapt our proposed policy to systems
with arbitrarily low expediting costs xj > cj for all j ∈ J ; however, we are unable
to provide a rigorous proof of asymptotic optimality with general expediting costs.
Consider the linear program
K
J
pk Qk +
(hj Ij + δxj j )
(49)
δ
γ (p, S, L) ≡
min
Q≥0,I ≥0,
≥0
k=1
j =1
subject to
Ij =
K
akj Qk + j − Sj ≥ 0,
j ∈J,
(50)
k=1
Qk ≤ Lk ,
k ∈ K0 ,
(51)
which provides the minimum cost arrangement of queues and inventory levels for
given prices p ∈ +,K , shortage S ∈ J , and upper bound on queue-lengths L ∈
+,K0 , allowing for extra expediting. As increases, Q may decrease, and so the
formulation of the linear program defining γ captures the cost trade-off of expediting
to achieve lower queue-levels than would be necessary to satisfy quoted maximum
leadtimes. The following lemma provides the conditions under which extra expediting is suboptimal.
K0
akj Lk for all j ∈ J so that the linear program definLemma 2 Assume Sj ≤ k=1
ing γ (p, S, L) in (49)–(51) is feasible. If
J
−1
−1
xj > max akj pk + δ
akm hm
for all j ∈ J ,
(52)
k:akj >0
m=1
then any optimal solution to γ (p, S, L) has = 0 and, for the special case that
Lk = λk (p , l )l k for all k ∈ K0 , is also an optimal solution for the linear program
in (41)–(43).
Queueing Syst (2008) 60: 1–69
21
Lemma 2 and the upper bound on the shortage process (27) suggest that in the
high-volume limit, under assumption (52), the expediting process of any asymptotically optimal policy should behave as
+
K
n
n
n
n
akj Ok s − lk − Cj (s) , j ∈ J .
(53)
Xj (t) ≡ sup
0≤s≤t
k=1
The process X is the minimal cumulative amount of expediting required to satisfy
quoted maximum leadtimes. Let
S nj (t) ≡
K
akj Okn (t) − Cjn (t) − Xnj (t),
j ∈J,
(54)
k=1
be the associated shortage process. Our third lemma establishes the behavior of
(X n , S n ) in the high-volume limit.
√
√
√
Lemma 3 Suppose nθ n → θ ∈ J , nlkn → l k for k ∈ K0 , and nlkn → ∞ for
k ∈ K\K0 as n → ∞. Then,
n
S Xn
⇒ (Sθ,l , Xθ,l ),
√ ,√
n
n
as n → ∞.
3.3 Numerical examples
We show how to find in (23) analytically in an extremely simplified version of
Example 1, and also in Example 2. In both cases, the set has exactly one element,
(θ , l ).
The two examples are chosen to show how the parameters that determine our
proposed asymptotically optimal policy, θ and l , differ between settings in which
price discrimination through leadtime differentiation is, versus is not, optimal. When
there is no leadtime differentiation (every physical product is offered at exactly one
price and
√ leadtime), each element of the shortage process has an upper bound of
order n that is determined by l . Otherwise, the shortage of any component
√used
in a product that is offered at two distinct prices and leadtimes, divided by n, is
arbitrarily large, and the maximum leadtime quoted for the higher-priced product is 0
under any asymptotically optimal policy.
Example 1 (Continued and Extremely Simplified) We reduce the assemble-to-order
system to a pure inventory system, in which there is one product and one component. Then, we can compute (θ , l ) analytically. In general, the computation must
be done numerically, using the approach shown in Sect. 5 for a more general problem
formulation.
Let
λ(p, l) = 2 − 2p − l,
22
Queueing Syst (2008) 60: 1–69
and assume c = 1/2. Then, the static planning problem
π=
max
p≥0,l≥0,μ≥0
pλ(p, l) − μc
subject to
λ(p, l) = μ
has solution
p = 3/4,
λ = μ = 1/2,
and l = 0.
The linear program in (41)–(43)
3
min δ Q + hI
4
Q≥0,I ≥0
subject to
I = Q − S ≥ 0,
1
Q≤ l
2
has solution
(q , i )(S) =
(0, S),
(S, 0),
S < 0,
S ≥ 0.
Suppose the arrival and component production processes are both Poisson so that
σ 2 = λ + μ = 1. Then, B is a Brownian motion with drift θ and variance σ 2 that
satisfies
1
Sθ,l (t) = B(t) − Xθ,l (t) ≤ l
2
for
∞
1
Xθ,l (0) = 0,
l − Sθ,l dXθ,l (t) = 0.
Xθ,l non-decreasing, and
2
0
Our objective is to maximize
1
D(θ, l) = δ −1 cθ − δ −1 l − H(θ, l),
4
over θ ∈ and l ≥ 0, where
∞
H(θ, l) = E
e−δt δp Sθ,l (t)1 Sθ,l (t) > 0 + hSθ,l (t)1 Sθ,l (t) ≤ 0 dt
0
+ x dXθl (t) ,
recalling that D(θ, l) was defined in (46), and H(θ, l) in (45).
Queueing Syst (2008) 60: 1–69
23
Following the same arguments as in Proposition 5.11 in Harrison and Taksar [14]
or Theorem 2 in Constantinides and Richard [11], it follows that
H(θ, l) = k(0),
where k is twice continuously differentiable on (−∞, (1/2)l], and satisfies
1 k (t) + θ k t1{t ≥ 0} − ht1{t < 0} = 0.
2
The solution is
k(t) =
k1 (t),
t ≥ 0,
k2 (t),
t < 0,
where
k1 (t) = c1 er1 t + c2 er2 t + p t +
θp ,
δ
θh
h
k2 (t) = d1 er1 t − t − 2
δ
δ
for
θ 2 + 2δ,
r2 = −θ − θ 2 + 2δ,
r1 = −θ +
c1 =
x − p −r1 1 l (p + hδ )( θδ r1 − 1) (r2 −r1 ) 1 l
2 ,
e 2 −
r2 e
r1
r2 − r1
(p + hδ )( θδ r1 − 1)
,
r2 − r1
θ
h
d1 = c1 + c2 +
p +
.
δ
δ
c2 =
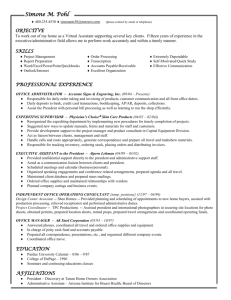
Figure 2 graphs the function D(θ, l) when x = 6, h = 0.25, and δ = 0.1. The
function is concave, and the maximum is attained at
θ , l = (−0.0898, 1.0760),
for D(θ , l ) = −16.134. Consistently with intuition, as holding cost increases, the
capacity imbalance θ becomes positive, and the allowable leadtime for products,
(1/2)l , also increases. Specifically, increasing h to 1/2 while keeping all other parameters the same yields the solution (θ , l ) = (0.0292, 1.5478) for D(θ , l ) =
−19.98. Also consistently with intuition, as the expediting cost increases, the capacity imbalance decreases, and the allowable leadtime for products, (1/2)l , also
increases. In particular, changing the expediting cost x to 10 from 6, keeping the
holding cost h = 1/4 as it was before, and having all other parameters the same results in the solution (θ , l ) = (−0.1900, 2.2834) for D(θ , l ) = −19.94.
24
Queueing Syst (2008) 60: 1–69
Fig. 2 D(θ, l) graphed as a
function of θ and l when
p = 3/4, c = 1/2, δ = 0.1,
h = 1/4, and x = 6
The condition in Theorem 1 requires that x > p + h/δ. However, the computation
of (θ , l ) does not require this condition. In the general model setting with K products and J components, it continues to be the case that we can compute (θ , l ) without the condition on the expediting costs. Furthermore, we expect the upper bound in
Theorem 1 to hold for any expediting cost xj > cj . However, the proof of asymptotic
optimality is very challenging in this more general setting, for reasons explained in
Sect. 5.1.
Example 2 (Continued) Assume c = 1/10 in Example 2, which implies
1
p1 = ,
2
4
μ = .
5
p2 =
3
,
10
1
λ1 = ,
2
λ2 =
3
,
10
l1 = 0,
1
l2 = ,
5
and
When holding costs are zero, the linear program in (41)–(43) becomes
1
3
min δQ1 + δQ2
Q 2
10
subject to
Q1 + Q2 − S ≥ 0,
which has solution
q1 , q2 , i =
1
0 ≤ Q1 ≤ l,
2
(0, 0, S),
S ≤ 0,
(0, S, 0),
S ≥ 0.
Because one customer class is patient, the system manager can fill orders within the
quoted maximum leadtime in high volume without expediting, and so s = ∞ for s
Queueing Syst (2008) 60: 1–69
25
defined in (33). Then, the process Sθ,l defined in (29)–(30) is such that Sθ,l (t) has a
normal distribution with mean θ t and variance σ 2 t, where
1 2
3 2
4
σ 2 = σO1
+ σO2
+ σC2 ,
2
10
5
as defined in (25).
We now calculate
max D(θ, l)
θ∈
,l≥0
for D(θ, l) defined in (46). The function H(θ, l) defined in (45) is
∞
3
H(θ, l) = E
δe−δt Sθ,l (t)1 Sθl (t) ≥ 0 dt
10
0
∞
3 δe−δt E Sθl (t)1 Sθl (t) ≥ 0 dt,
=
10
0
where the interchange of expectation and integral sign follows because the integrand
is non-negative. By Proposition 18.3 in Browne and Whitt [6], letting φ and be the
probability density and cumulative distribution functions, respectively, of a standard
normal random variable,
√
E Sθl (t)|Sθl (t) ≥ 0 = θ t + σ t
√
φ( −θσ t )
√
1 − ( −θσ t )
.
Therefore, since
E Sθl (t)1 Sθl (t) ≥ 0 = E Sθ,l (t)|Sθ,l (t) ≥ 0 × P Sθ,l (t) ≥ 0 ,
and
√ −θ t
P Sθ,l (t) ≥ 0 = 1 − ,
σ
it follows that
√ √ √
−θ t
−θ t
E Sθ,l (t)1 Sθ,l (t) ≥ 0 = θ t − θ t
+ σ tφ
.
σ
σ
Substitution then yields that
3
3 θ
H(θ, l) =
+
10 δ 10
∞
δe
−δt
0
√ √ √
−θ t
−θ t
σ tφ
− θ t
dt,
σ
σ
and so
1
−1 θ
3
D(θ, l) =
− l−
5 δ 2
10
∞
δe
0
−δt
√ √ √
−θ t
−θ t
− θ t
dt,
σ tφ
σ
σ
26
Queueing Syst (2008) 60: 1–69
Fig. 3 D(θ , 0) graphed as a
function of θ for the parameters
in Example 2 when σ 2 = 1 and
δ = 0.1
where b = 1/2 is calculated for Example 2 at the end of Sect. 2.4. Because l ≥ 0 in
the above expression, setting l to 0 maximizes D(θ, l). We then need to maximize
D(θ, 0) over θ . Figure 3 shows graphically that D(θ, 0) is a concave function of θ .
The optimum θ , θ , occurs at −0.1038, and D(θ , 0) = −0.31.
That l = 0 in the continuation of Example 2 is not by chance. Consider any
two products k ∈ K0 and m ∈ K\K0 that are physically identical (akj = amj for all
and l = 0 < l j ∈ J ) but differentiated in price and maximum leadtime (pk > pm
m
k
in the optimal solution to static planning problem). Holding an order for product m
is cheaper than holding an order for product k and has identical effect on component
inventory, so qk (S, L) = 0 for any S ∈ J and L ∈ +,K0 . Furthermore, because the
j th component of the shortage process is unrestricted for any j such that amj > 0, for
, i )(S (t), l) does not depend on l. Therefore, in a system
any l > 0 and t > 0, (qm
θ,l
m
in which products are differentiated only by price and maximum leadtime (i.e., all
products require the same components),
∂H/∂l k = 0,
k ∈ K0 ,
and so, because bk > 0 for k ∈ K0 , by Assumption 1
∂D/∂l k < 0.
We conclude that l k = 0 for all k ∈ K0 to maximize D(θ, l) in (46).
3.4 Exact leadtime quotation
We have assumed that prospective customers know only the quoted maximum leadtimes, not the distribution of actual leadtimes. If impatient customers did have information about the actual leadtimes for products in classes K\K0 before ordering
(e.g., through word-of-mouth), and knew that delays for those products were likely
to be short, some might switch their orders from the expensive products in classes K0
with guaranteed short leadtimes to the cheaper products in classes K\K0 . This would
reduce the optimal expected discounted profit generated by the assemble-to-order
system. The effect of giving customers information about actual leadtimes would, in
equilibrium, be similar to that of requiring exact leadtime quotation
Ak (t) = Ok (t − lk )
for all t ≥ 0 and k ∈ K
(55)
Queueing Syst (2008) 60: 1–69
27
rather than (1). Under (55), the assembly process would be determined by the order
arrival process, such that discounted profit in (6) would become
K k=1 0
∞
pk e
−δ(t+lk )
dOk (t) −
J ∞
e−δt cj dCj (t) + hj Ij (t) dt + xj dXj (t) .
j =1 0
(56)
To construct an upper bound on discounted profit (56), suppose that orders flow
at their long run average rates as in the construction of the static planning problem
in (8)–(9) and, additionally, suppose that the system manager is able to produce each
component j precisely when needed to assemble products while paying only cj per
unit. The resulting upper bound on expected discounted profit
K
J
δ −1 π ≡ δ −1 max
e−δlk pk −
akj cj
(57)
p≥0,l≥0
j =1
k=1
equals δ −1 π in the case that the unique optimal solution to the static planning problem (8)–(9) has zero leadtimes for all products l = 0 and is strictly less than δ −1 π
in the case that lk > 0 for at least one product k ∈ K. It follows that, in the case that
lk > 0 for at least one product k ∈ K, requiring exact leadtime quotation will reduce
expected discounted profit in the nth system by approximately
nδ −1 π − π → ∞ as n → ∞.
Fundamentally, the reduction in discounted profit occurs because of a delay in order
fulfillment and hence revenue collection.
We conclude that in the case that lk > 0 for at least one product k ∈ K, the system
manager would strongly prefer the greater flexibility associated with maximum leadtime quotation as opposed to exact leadtime quotation. Hence there is a very strong
(of order n) financial incentive to prevent prospective customers from obtaining information about actual leadtimes.
In contrast, in the case that lk = 0 for all k ∈ K, the reduction in discounted
√ profit
from imposing the exact leadtime constraint (55) will be at most of order n. This
is because we expect that all terms in the expression for the diffusion-scaled profit
in (40) will have a limit. The loss in profit will occur because queue-length and inventory levels will not match the levels given by the linear program in (41)–(43) that
asymptotically minimize instantaneous holding costs.
4 An asymptotically optimal policy
In this section, we propose a policy for setting prices, maximum leadtimes, component production rates, and dynamically sequencing orders for assembly and expediting components. We then show that the proposed policy is asymptotically optimal.
Our proposed policy is a discrete review policy that releases orders for assembly
at times ir n , i ∈ {1, 2, . . .}, where the review period length is
rn ≡
1
nβ
(58)
28
Queueing Syst (2008) 60: 1–69
for
1 + 1 32 (1 + 1 )
1
<β <
∧
< 1.
2
2 + 1
3 + 2
1
Note that the length of the review period is tied to the number of moments (2 + 2
1
for 1 > 0) assumed on the order and component inter-arrival times.
Prices, quoted maximum leadtimes, and production capacity are
p n = p n−1/2 θ , n−1/2 l ,
l n = l n−1/2 θ , n−1/2 l ∨ r n ,
μn = μ n−1/2 θ , n−1/2 l ,
according to the solution of the perturbed static planning problem in (17)–(19) with
perturbation (n−1/2 θ , n−1/2 l ∨ r n ) where (θ , l ) ∈ . Recall that was defined
in (47). Because orders are only assembled at discrete review time points, to satisfy
the constraint that all orders must be filled within their quoted maximum leadtimes
(1) the proposed policy quotes maximum leadtimes weakly greater than the review
period, lkn ≥ r n for all k ∈ K.
In our proposed policy, the system manager expedites components and releases
orders for assembly at discrete review time points The proposed expediting and assembly processes are
Xn (t) = Xn ir n for t ∈ ir n , (i + 1)r n and i ∈ {0, 1, 2, . . .},
An (t) = An ir n for t ∈ ir n , (i + 1)r n and i ∈ {0, 1, 2, . . .}
with (Xn (ir n ), An (ir n )) defined recursively, as follows. At time 0, Xn (0) =
An (0) = 0. For every positive integer i, given the cumulative quantities expedited
and assembled at the last review period
n
X (i − 1)r n , An (i − 1)r n ,
for each j ∈ J ,
n
X,j
K
n
n
n
ir ≡ max X,j (i − 1)r ,
akj max Okn (i + 1)r n − lkn ,
k=1
An,k (i
− 1)r
n
− Cjn
n
ir
,
(59)
which is the minimum cumulative amount of expediting required to assemble orders
that are due within the review period, that is, before time (i + 1)r n , and to satisfy the
constraint that the expediting and assembly processes are non-decreasing. Finally, the
cumulative number of orders assembled by time ir n is
(60)
An ir n = O n ir n − Qn ir n ,
Queueing Syst (2008) 60: 1–69
29
where for each i, (Qn (ir n ), In (ir n )) solve
min δ
Q,I ≥0
K
pk Qk
K0
J
n
n n n
n +
Qk − λk p , l lk − r
+ζ
+
hj Ij
k=1
(61)
j =1
k=1
subject to
Ij ≡
K
akj Qk − Sjn ir n ≥ 0,
j ∈J,
(62)
k=1
Qk ≤ Lni,k , k ∈ K,
Qk ≤ Okn ir n − An,k (i − 1)r n ,
(63)
k∈K
(64)
for
ζ >δ
K
k=1
pk +
J
j =1
hj
K
akj
a finite constant
(65)
k=1
Lni,k ≡ Okn ir n − Okn (i + 1)r n − lkn .
(66)
The expediting policy Xn guarantees feasibility of (61)–(64) at every discrete review
time point ir n .
The assembly policy An minimizes instantaneous holding cost except in circumstances where that myopic approach would cause excess expediting; the purpose of
the penalty ζ is to prevent excess expediting. Recall from (26) in Sect. 3.1 that to fill
orders for product k ∈ K within the quoted maximum leadtime lkn , the queue should
not exceed λnk (p n , l n )lkn . The penalty ζ is large enough to ensure
Qn,k ir n ≤ λnk p n , l n lkn − nr n , k ∈ K,
whenever feasible. Thus the penalty ζ prevents allocation of a scarce component to
fulfill an order for a product with relatively high holding cost δpk before that order
is due when, in order to prevent excess expediting, that component should instead
be allocated to another product with relatively low holding cost δpk , high queue,
and orders that are due immediately. Constraint (62) ensures the inventory process
is non-negative. Constraint (63) requires that all orders are assembled within their
quoted maximum leadtimes, which can be seen by substituting the expression for Qn
in (60) into the constraint (63) to find
An,k ir n ≥ Okn (i + 1)r n − lkn , k ∈ K.
Therefore,
An,k (t) = An,k
t
t
n
n
n
n
n
n
r
≥
O
+
1
r
−
l
k
k ≥ Ok t − lk ,
n
n
r
r
k ∈ K,
(67)
30
Queueing Syst (2008) 60: 1–69
and so, in words, the number of orders for product k assembled up to time t always
equals or exceeds the number of orders for product k received up to time t − lkn , as
required by (1). Constraint (64) maintains a non-decreasing assembly process.
Let (qn , in )(S, L) denote a solution to the optimization problem in (61)–(63). Similarly to Plambeck and Ward [28] (see the discussion following Assumption 1) or
Bassamboo et al. [3] (see Proposition 2 and the surrounding discussion), we assume
that (qn , in )(S, L) is Lipschitz continuous in (S, L) for each n, and that the sequence
of Lipschitz continuous solutions can be chosen so that the convergence
1 √ qn , in S n , Ln → q (S, L)
n
√
√
as n → ∞ holds when S n / n → S and Ln / n → L as n → ∞. This is true whenever the vector of cost coefficients
J
J
hj a1j , . . . , pK +
hj aKj
p1 +
j =1
j =1
is not parallel to (akj )k=1,...,K , the vector of products requiring component j , for
every j ∈ J . Note that whenever (qn , in )(S n (ir n ), Lni ) satisfies constraint (64), we
select
n n n n n n n n n Q ir , I ir
= q , i S ir , Li .
Asymptotic optimality
The proposed policy satisfies the conditions for an asymptotically optimal policy established in Proposition 1, that p n → p , μn → μ , and l n → l as n → ∞. The
following lemma shows that the conditions for an asymptotically optimal policy established in Proposition 2 are also satisfied.
Lemma 4 The proposed policy satisfies
√ −1/2 −1/2 nlk n
θ ,n
l ∨ r n → l k ,
k ∈ K0
as n → ∞.
√
The other condition in Proposition 2, that lim supn→∞ n|θ n | < ∞ for θ n defined in (23), is satisfied because the constraint (18) in the perturbed static planning
problem shows
θjn =
K
akj λk p n , l n − μnj = n−1/2 θj ,
j ∈J.
k=1
In high volume, under the proposed policy, the dimensionality of the limiting system equals the number of components J .
Queueing Syst (2008) 60: 1–69
31
Proposition 3 Under the proposed policy,
n n n n
⇒
Sθ ,l , Xθ ,l , q (Sθ ,l , L ), i (Sθ ,l , L ) ,
S̃ , X̃ , Q̃ , I˜
as n → ∞, where (q , i ) is the solution to (45)–(47) with Lk = λk (p , l )l k for
k ∈ K0 , and (Sθ ,l , Xθ ,l ) is the RBM defined in (29)–(30) with drift θ and state
space S = (−∞, s 1 ] × · · · × (−∞, s J ].
Furthermore, when the system operates under the proposed policy, the upper
bound on expected profit in Theorem 1 is attained.
Proposition 4 Under the proposed policy,
n
˜ = D θ , l .
lim E n→∞
We note that Propositions 3 and 4 are exactly Proposition 4.2 in Plambeck and
Ward [28] when customers are infinitely patient, so that leadtime quotation is irrelevant and there is no expediting. It is the translation of the constraint that all orders
are filled within the quoted maximum leadtime to an upper bound on the shortage of
each component that makes the proofs technically more challenging.
The asymptotic optimality stated in our next theorem follows immediately from
Propositions 3 and 4.
Theorem 2 Assume
xj > max
k:akj >0
−1
akj
pk + δ −1
J
akm hm
for every j ∈ J .
(68)
m=1
The policy proposed in Sect. 3 having
n
˜ = D θ , l
lim E n→∞
(69)
is asymptotically optimal.
5 Systems with salvaging and a general cost of expediting
The proposed assembly and expediting policies are not easily implementable in practice because of the large amount of state information required. Furthermore, up to
this point, we have focused on dynamic control of assembly sequencing and component expediting. In particular, we have assumed that component production capacity
is a fixed decision at the beginning of the time horizon, and all components that are
produced must either be assembled into products to meet customers’ orders or remain in inventory. In reality, when component inventory grows too large, most firms
will dynamically salvage excess components (or idle component production capacity). Moreover, expediting may not always be as expensive as required in Theorem 1,
32
Queueing Syst (2008) 60: 1–69
and so it may be beneficial in practice to sometimes expedite components earlier than
strictly needed to satisfy maximum leadtimes.
In this section, we generalize our formulation to allow for component salvaging
and cheap expediting. Rather than require that all orders are filled within the quoted
maximum leadtime (1), we require that all orders are filled within the quoted maximum leadtime with arbitrarily high probability: for any T > 0,
P An,k (t) ≥ Okn t − lkn for all 0 ≤ t ≤ T and k ∈ K → 1.
This relaxation allows us to propose a profitable and relatively easy-to-implement
control policy. The proposed policy is based on the numerical solution of a Brownian
control problem that is heuristically motivated by the analysis in Sects. 3 and 4.
We expect that our proposed policy with dynamic salvaging and a general cost
of expediting is asymptotically optimal; however, proving its asymptotic optimality
appears very difficult, and the reasons why will become apparent in Sect. 5.1, which
sets up the approximating Brownian control problem. However, numerically solving
the limiting Brownian control problem is tractable, and we do this in Sect. 5.2. Because most of the assemble-to-order literature assumes each component is managed
according to an independent base stock policy, we choose numerical examples that
illustrate when the profit gain from joint optimal control of all component inventory
levels is small vs. large. Finally, Sect. 5.3 discusses how to translate the solution to the
approximating Brownian control problem into our proposed policy for the associated
discrete event assemble-to-order system.
5.1 The approximating Brownian control problem
Suppose that the system manager can sell component j ∈ J for a low price of vj
per unit, and expedite production of component j at a cost of xj per unit where
vj < cj < xj . (The cost of expediting one unit, xj , should be higher than the nominal
cost of producing one unit, cj , because otherwise the system manager would only use
expedited production with instantaneous delivery, and there would be no interesting
control problem.) Note that the salvage value vj for a component may be negative; in
some applications and particularly in the electronics industry, disposal of excess components may be costly. Let V approximate the cumulative, diffusion-scaled number
of components salvaged in this manner. Then the process approximating the shortage
process, S is defined similarly to (29), except with the addition of V ,
S(t) = B(t) − X(t) + V (t) ∈ S ≡ (−∞, s 1 ] × · · · × (−∞, s J ].
(70)
Given a capacity and maximum leadtime perturbation (θ, l), for Lk = λk (p , l )l k ,
k ∈ K0 , the optimal expediting and salvaging processes are the solution to the Brownian control problem
K
J
∞
−δt
e
pk qk S(t), L +
hj ij S(t), L dt
δ
minE
X,V
+
0
J
j =1
k=1
xj dXj (t) − vj dVj (t)
j =1
(71)
Queueing Syst (2008) 60: 1–69
33
subject to
X, V ∈ D([0, ∞), ) are non-decreasing, RCLL, adapted to B,
have X(0) = V (0) = 0,
and condition (70) holds.
The definition of the expediting process X in (30) no longer applies, because expediting of component j may occur before the upper bound s j (defined in (33))
is reached. The optimal objective value in (71) substitutes for H(θ, l) in the definition of D(θ, l) in (46). Because the structure of the optimal expediting and salvaging processes in (71) is unknown, constructing an upper bound on achievable
expected diffusion-scaled and centered infinite-horizon discounted profit as in (106)
in the proof of Theorem 1 is much more difficult, and so we do not prove asymptotic
optimality.
5.2 Solving the approximating Brownian control problem
We numerically solve the Brownian problem for two particular systems with J = 2
components, using the algorithm of Kumar and Muthuraman [17], and exhibit structural properties that hold for any assemble-to-order system with 2 components. Consider a system with two components and three products. Product 1 requires both
components and has price p1 = 5. Product 2 requires only component 1 and has
price p2 = 3. Product 3 requires only component 2 and has price p3 = 3. The three
products are not leadtime constrained: L1 = L2 = L3 = ∞ in (43). The expediting costs and salvage values are identical for the two components: x1 = x2 = 2,
and v1 = v2 = 0.2. We will consider both the case in which physical holding costs
are present h1 = h2 = 1, and the case in which no physical holding costs exist
h1 = h2 = 0. The discount rate is δ = 0.15.
In both the case that h1 = h2 = 1 and the case that h1 = h2 = 0, the solution to the
linear program (41)–(43) gives priority to the high-revenue product 1:
⎧
(0, 0, 0), (−S1 , −S2 ),
S1 ≤ 0, S2 ≤ 0,
⎪
⎪
⎪
⎪
⎪
(0,
S
,
0),
(0,
−S
),
0
< S1 , S2 < 0,
⎪
1
2
⎨
S1 < 0, S2 > 0,
q1 , q2 , q3 , i1 , i2 = (0, 0, S2 ), (−S1 , 0),
⎪
⎪
⎪
(S2 , S1 − S2 , 0), (0, 0), S1 > S2 > 0,
⎪
⎪
⎪
⎩
(S1 , 0, S2 − S1 ), (0, 0), S2 > S1 > 0.
The optimal objective value (i.e., the instantaneous
(S1 , S2 )) is
⎧
S1 + S2 ,
⎪
⎪
⎪
⎪
⎪
⎪
3
2
⎨ 3S1 + S2 ,
pk q k +
hj ij = S1 + 3S2 ,
δ
⎪
⎪
k=1
j =1
⎪ 3S1 + 2S2 ,
⎪
⎪
⎪
⎩
2S1 + 3S2 ,
cost associated with shortage
S1 ≤ 0, S2 ≤ 0,
0 < S1 , S2 < 0,
S1 < 0, S2 > 0,
S1 > S2 > 0,
S2 > S1 > 0,
34
Queueing Syst (2008) 60: 1–69
Fig. 4 The optimum region in which to contain the shortage process through expediting and salvaging
when h1 = h2 = 1 and
⎧
0,
⎪
⎪
⎪
⎪
⎪
⎪
3
2
⎨ 3S1 ,
δ
pk q k +
hj ij = 3S2 ,
⎪
⎪
k=1
j =1
⎪
3S1 + 2S2 ,
⎪
⎪
⎪
⎩
2S1 + 3S2 ,
S1 ≤ 0, S2 ≤ 0,
0 < S1 , S2 < 0,
S1 < 0, S2 > 0,
S1 > S2 > 0,
S2 > S1 > 0,
when h1 = h2 = 0.
For θ = 0, Fig. 4 shows the optimum region R in which to constrain the shortage
process by expediting and salvaging components. The region R can be thought of as
the “no control” region. The first structural insight is that components are expedited
when the shortage process is high, even in the absence of maximum leadtime constraints. Expediting reduces the financial holding cost associated with delaying order
assembly. Components are salvaged to generate revenue and avoid physical inventory
holding cost when the shortage process is low.
Observe that in Fig. 4b the shortage process is contained in a “no control” region
that more closely resembles a rectangle than does the “no control” region in Fig. 4a.
When the “no control” region is rectangular, salvaging and expediting of one component do not depend upon the shortage of other components. Independent control
of each component is attractively simple to implement. Figure 4 suggests that when
physical holding costs are negligible, the system manager can employ simple independent control of each component, rather than the complex optimal policy, with
relatively little loss of profit. Independent control of each component is exactly optimal for a system in which physical holding costs are negligible and (in contrast to the
formulation in this paper) filling an order early does not cause the customer to pay
early; see Plambeck and Ward [29].
Further inspecting Fig. 4, one finds that the two components are complements,
meaning the value of holding one component increases as the number of the other
component increases. The threshold for expediting component 1 increases with the
shortage of component 2. The threshold for salvaging component 1 also increases
Queueing Syst (2008) 60: 1–69
35
with the shortage process for component 2. Adding a unit of component 2 increases
the value of a marginal unit of component 1, and vice versa. This complementarity
follows from the following general property of the instantaneous cost function for
assemble-to-order systems with two components.
Lemma 5 For any assemble-to-order system with J = 2 components,
K
2
∂
pk qk (S) +
hj ij (S)
δ
∂Si
k=1
is decreasing in Sj , j = i, i, j ∈ {1, 2}
j =1
in the feasible region (−∞, s 1 ] × (−∞, s 2 ].
We solved the Brownian control problem for a wide variety of ATO systems with
J = 2 components, and observed that the two components are always complements.
Based on Lemma 5 and our numerical study, we believe that for any ATO system
with two components, the optimal policy has the following structural property.
Conjecture For any assemble-to-order system with J = 2 components, the solution
to the Brownian control problem is a state-dependent threshold policy:
Salvage component 1
if S1 < T 1 (S2 ),
Expedite component 1 if S1 > T 1 (S2 ),
Salvage component 2 if S2 < T 2 (S1 ),
Expedite component 2 if S2 > T 2 (S1 ),
where the thresholds T 1 (·), T 1 (·), T 2 (·), T 2 (·) are non-decreasing and satisfy
T 1 (·) ≤ T 1 (·), and T 2 (·) ≤ T 2 (·).
Benjaafar and El Hafsi [4] prove a similar structural property for assembly systems with a single product (K = 1). Specifically, they consider salvaging (but not
expediting) and prove that a state dependent base stock policy is optimal, where
the base stock level for each component is non-decreasing in the inventory position
of other components. However, these simple structural properties do not generalize
to assemble-to-order systems with J ≥ 3 components and K ≥ 2 products, because
components may be substitutes (meaning the value of holding one component may
decrease as the number of another component increases) rather than complements.
One might hope to prove our conjecture by showing that the conjectured structural property is preserved at each successive iteration of the algorithm of Kumar and
Muthuraman [17].
their algorithm requires convexity in the holding
Unfortunately,
J
q (S) +
cost function δ K
p
k=1 k k
j =1 hj ij (S), and their proof of convergence is
only for one-dimensional problems. We chose parameters for the example in Fig. 2
such that convexity holds. However, this is not true in general. If we increase the price
of product 1 so that p1 > 2p2 and maintain p2 = p3 , then for x = (1p1 − 2p2 , 1) and
36
Queueing Syst (2008) 60: 1–69
y = (1, 1p1 − 2p2 ) and h1 = h2 = 0
3
pk qk (x) +
k=1
3
pk qk (y) = 2p1 + 2p2 (p1 − 2p2 )
k=1
< 2p1 + p1 (p1 − 2p2 )
=
3
pk qk (x + y),
k=1
which implies that convexity is false.
5.3 Policy translation
The proposed policy sets prices, quoted maximum leadtimes, and production capacity
θ l
p =p √ ,√ ,
n
n
θ
l
lkn = l √ , √ ∨ r n ,
n
n
θ
l
μn = μ √ , √ ,
n
n
n
(72)
(73)
(74)
according to the solution of the perturbed static planning problem in (17)–(19) with
√
√
perturbation (θ n, l / n ∨ r n ) and
(θ , l ) ∈
arg max
θ∈
J ,l∈
+,K0
δ
−1
J
j =1
cj θ j −
K0
bk l k − H(θ, l)
k=1
where H(θ, l) now denotes the optimal objective value in (71).
In translating the optimal solution X and V to the Brownian control problem (71) with the optimal (θ , l ) into a salvaging and expediting policy in the nth
assemble-to-order system, we relax the constraint (1) that every order must be assembled within the quoted maximum leadtime for every n. Instead, we allow for a
vanishingly small probability of a sample path on which any tardiness occurs. This
relaxation allows us to propose a policy for dynamic salvaging, expediting and assembly sequencing that is relatively simple to implement, asymptotically optimal under
the conditions of Theorem 2, and highly effective in general.
The processes X and V (corresponding to an optimal (θ , l )) restrict the diffusion approximating the shortage process S to some region R ⊆ S. To translate the
solution into a policy for expediting and salvaging in the nth assemble-to-order sys√
tem, the system manager should scale the “no control” region R by n, and, at each
review time point ir n , expedite and salvage the minimal components necessary to
Queueing Syst (2008) 60: 1–69
37
maintain the shortage process in
Rn =
√
nR ∩ −∞,
K
!
ak1
k=1
× −∞,
K
!
akJ λnk
!
""
λnk p n , l n lkn − nr n 1 + max λk p n , l n
× ···
k∈K
!
n n n
n n ""
n
p , l lk − nr 1 + max λk p , l
.
k∈K
k=1
The intersection in the above expression is necessary to ensure that when R is not a
strict subset of S, the expediting policy provides an extra cushion to ensure that all
quoted maximum leadtimes are satisfied in high volume with very high probability.
The cumulative number of orders assembled is defined recursively, as in (60),
but can no longer be defined in terms of Qn that solves (61)–(64) because the constraint (63) that ensures all quoted maximum leadtimes are satisfied may no longer
be feasible. Instead, for each review time point ir n let (Qn (ir n ), In (ir n )) solve
min δ
Q≥0,I ≥0
+
J
K
pk Qk + ζ
k=1
K #
!
!
""$+
Qk − λnk p n , l n lkn − r n 1 + max λk p n , l n
k∈K
k=1
(75)
hj Ij
j =1
subject to
Ij =
K
akj Qk − Sjn ir n ≥ 0,
j ∈J,
(76)
k=1
Qk ≤ Okn ir n − An,k (i − 1)r n ,
k ∈ K.
(77)
The penalty term
ζ
K #
!
!
""$+
Qk − λnk p n , l n lkn − r n 1 + max λk p n , l n
k∈K
k=1
in the objective function substitutes for the hard constraint (63) that orders must be
filled within the quoted maximum leadtime. Recall from (65) that ζ is a constant
large enough to ensure
!
!
""
for all k ∈ K
Qn,k ir n ≤ λnk p n , l n lkn − r n 1 + max λk p n , l n
k∈K
whenever feasible.
The probability that all orders are filled within the quoted maximum leadtime
converges to 1 in the high-volume limit.
38
Queueing Syst (2008) 60: 1–69
Lemma 6 Let T > 0. Under the proposed policy
P An,k (t) ≥ Okn t − lkn for all 0 ≤ t ≤ T and k ∈ K → 1
(78)
as n → ∞.
Finally, suppose that salvage values and component holding costs are negligible
so that zero salvaging is optimal, and suppose that expediting costs are high as in
Theorem 2. Then, the policy proposed in this Subsection is attractively simple and
asymptotically optimal. The proposed expediting process is
n
n
X (t) = X ir n for t ∈ ir n , (i + 1)r n and i ∈ {0, 1, 2, . . .},
where
n
Xj ir n
≡ max
m=1,...,i
−
K
K
akj Okn mr n − Cjn mr n
k=1
!
akj
!
""
nλk p n , l n lkn − nr n 1 + max λk p n , l n
+
k∈K
k=1
.
(79)
This is designed so that the associated shortage process
n
S j (t) =
K
n %
akj Okn (t) − Cjn (t) − Xj
& t/r n r n ,
j ∈J
(80)
k=1
stays within the region determined by the upper bounds
n
S j (t) ≤
K
k=1
!
!
""
,
akj nλk p n , l n lkn − nr n 1 + max λk p n , l n
k∈K
j ∈J.
(81)
The proposed assembly policy in (60) is defined using the linear program in (75)–
(77) to define Qn (ir n ) at each review time point ir n , i ∈ {1, 2, . . .}. The advantage
of this policy over the policy proposed in Sect. 4 is that the expediting process
n
X in (79) requires much less state information than the expediting process X in (59). At each discrete review time period ir n , the system manager need only
know the shortage of component j to decide how much of component j to expedite.
6 Adapting prices, maximum leadtimes, and production capacity to shifts
in demand and supply conditions
Up to this point, we have assumed that component production costs and product
demand rates (as a function of prices and maximum leadtimes) are constant. In
practice, however, these changes occur at certain points in time, such as when fire
Queueing Syst (2008) 60: 1–69
39
damages a component production facility or a competitor introduces a new product. Assemble-to-order manufacturers, particularly those with Internet sales like
Dell, typically change their prices, maximum leadtimes and/or nominal rates of component production in response to such shocks in the business environment [25].
Selling online reduces the “menu costs” associated with changing prices, but not
to zero [7], and frequent price changes are perceived as unfair by customers [15].
Therefore, as noted by Netessine [24], prices do not change continuously over
time, but, rather, remain constant over a finite time horizon—until a significant
shift in the business environment justifies a change. This leads us to generalize
our model formulation to consider piecewise constant policies for setting prices,
maximum leadtimes, and component production rates, with the changes corresponding to random shocks in component production costs and product demand
rates.
This section is organized into four parts, to mimic the development of our proposed policy in Sects. 2 through 5. Sect. 6.1 generalizes our model formulation. We
construct an upper bound on expected profit in Sect. 6.2. In Sect. 6.3, we extend the
definition of our proposed policy, so that it remains asymptotically optimal (achieves
the upper bound on expected profit) in our generalized model formulation. Finally,
in Sect. 6.4, we further extend our proposed policy to allow for salvaging of excess
components and general expediting costs.
6.1 Model formulation
Suppose there are M possible realizations of the demand rate function and the nominal component production and expediting cost vectors, (λm , cm , xm ), m ∈ M =
{1, 2, . . . , M}. Changes in the demand rate function and the nominal component
production and expediting cost vectors occur at times {τ1 , τ2 , . . .}, where the “interarrival times” τi − τi−1 for i ∈ {1, 2, . . .} are independent and identically distributed
with finite expectation, and τ0 ≡ 0. When the system is in state (λm , cm , xm ) during the time interval [τi−1 , τi ) for some i ∈ {1, 2, . . .}, it independently shifts to state
(λm , cm , xm ) at time τi with probability wmm . We let m(t) denote the system state
at time t ≥ 0. The renewal processes Oik and Cij for i ∈ {0, 1, 2, . . .}, k ∈ K and
j ∈ J , represent the cumulative number of order and component arrivals, starting
from time τi and running through the next change in system state at time τi , and,
analogous to (14), have rates λik (pi , li ) and μij that are determined by the choice of
pi , li , and μi at time τi . The controls Xij (t), j ∈ J , represent the cumulative number
of components expedited in [τi , t), and Aik (t), k ∈ K, represent the cumulative number of type k orders assembled in [τi , t), for t ∈ [0, τi+1 − τi ]. Then, queue-lengths
are represented as
Qk (t) ≡ Qk (0)+
∞ 1{τi+1 ≤ t}(Oik (τi+1 − τi ) − Aik (τi+1 − τi ))
i=0
and the inventory levels as
+ 1{τi ≤ t < τi+1 }(Oik (t − τi ) − Aik (t − τi ))
,
k ∈ K,
40
Queueing Syst (2008) 60: 1–69
⎛
⎞
1{τi+1 ≤ t}(Cij (τi+1 − τi ) + Xij (τi+1 − τi )
⎟
∞ ⎜
⎜ − K
⎟
k=1 akj Aik (τi+1 − τi ))
⎜
⎟
Ij (t) ≡ Ij (0) +
⎜ + 1{τ ≤ t < τ }(C (t − τ ) + X (t − τ ) ⎟ ,
i
i+1
ij
i
ij
i ⎠
i=0 ⎝
− K
k=1 akj Aik (t − τi ))
j ∈J,
for t ≥ 0, where we have also allowed for general initial conditions. Analogous to (7),
infinite-horizon discounted profit is
K
∞ τi+1
J
=
δe−δt
pik Oik (t − τi ) −
cm(τi )j Cij (t − τi ) dt
τi
i=0
−
i=0
j =1
k=1
∞ τi+1
e
−δt
δ
τi
K
pik Qk (t) +
J
hj Ij (t) + δxm(τi )j Xij (t − τi ) dt .
j =1
k=1
The shortage process is
S0j (t) ≡ Sj (0) +
K
akj O0k (t) − C0j (t) − X0j (t),
t < τ1
k=1
K
− Sij (t) ≡ Sij τi +
akj Oik (t) − Cij (t) − Xij (t),
(82)
t < τi+1 − τi .
k=1
Under the assumption that
Sj (0) =
K
akj Qk (0) − Ij (0),
j ∈J,
k=1
the representation of the shortage process in terms of queue-lengths and inventory
levels
Sij (t) =
K
akj Qk (t + τi ) − Ij (t + τi ),
t < τi+1 − τi , j ∈ J
k=1
in (5) remains valid.
Let π m denote the optimal objective function value for the static planning problem
in (8)–(9) when the system is in state m, i.e., the demand rate function is λm and
component costs are (cm , xm ), and assume that Assumptions 1 and 2 hold for each
m ∈ M. Then, the upper bound on infinite-horizon discounted profit is
∞
e−δt nπ m(t) dt,
0
and the definition of the diffusion-scaled profit in (15) becomes
-∞
n − 0 e−δt nπ m(t) dt
n
˜
.
=
√
n
Queueing Syst (2008) 60: 1–69
41
The high-volume asymptotic regime is exactly as in Sect. 2.3, so that during
[τi , τi+1 ), with prices and maximum leadtimes (pi , li ), the order arrival rates are
λni (pi , li ) ≡ nλi (pi , li ),
and the component production rates are
nμni
in the nth system for all i ∈ {1, 2, . . .}. The renewal processes Oik and Cij are defined in terms of the independent sequences of mean 1 non-negative random variables
2 and σ 2 that
{zik (i ), i = 1, 2, . . .} and {yij (i ), i = 1, 2, . . .} having variances σOk
Cj
do not depend on i so that
n
(t) ≡ max
Oik
i ≥0:
zik (i
) ≤ λnik
n n
pi , l i t
i =1
Cijn (t) ≡ max
i
i ≥0:
i
and
yij (i
) ≤ nμnij t
.
i =1
For t ≥ 0 and i ∈ {0, 1, 2, . . .},
n
√ Oik
(t)
− λik pin , lin t , k ∈ K,
n
n
n
√ Cij (t)
n
n
− μij t , j ∈ J ,
C̃ij (t) ≡ n
n
n
Õik
(t) ≡
and
Sin (t)
S̃in (t) = √
,
n
Xin (t)
X̃in (t) = √
,
n
Qn (t)
Q̃n (t) = √ ,
n
I n (t)
and I˜n (t) = √ .
n
It follows that
˜ =
n
∞ τi+1
δe
−δt
i=0 τi
+
− τi ) −
J
cm(τi )j C̃ijn (t
− τi ) dt
j =1
k=1
i=0
K
n
pik
λm(τi )
k=1
−
n n
pik
Õik (t
∞
√ n
δ −1 e−δτi − e−δτi+1
×
K
∞ τi+1
i=0 τi
J
n n pi , l i −
cm(τi )j μnj − π m(τi )
e
−δt
j =1
K
k=1
n n
δpik
Q̃k (t) +
J
j =1
n
n
˜
hj Ij (t) + δxm(τi )j X̃ij (t − τi ) dt,
(83)
42
Queueing Syst (2008) 60: 1–69
where we have also used the fact that
∞
∞
e−δt nπ m(t) dt =
nπ m(τi ) δ −1 e−δτi − e−δτi+1 .
0
i=0
6.2 The upper bound on expected profit
, l , μ ) denote the solution to the static planning problem in (8)–(9) when
Let (pm
m
m
the demand rate function is λm and component costs are cm . As in (12), we assign
indices to products such that
=0
lmk
for k ∈ Km0 ≡ {1, . . . , Km0 }
and lmk
> 0 for k ∈ K\Km0
for positive integers Km0 ≤ K for all m ∈ M. Let
θijn ≡
K
akj λk pin , lin − μnij ,
j ∈J
k=1
be the capacity imbalance in the supply and demand for component j over [τi , τi+1 ).
Propositions 1 and 2 will be valid over each time interval [τi , τi+1 ), and so we can
restrict ourselves to policies that satisfy for each i ∈ {0, 1, 2, . . .}
n n n
pi , li , μi → pm(τ
, l , μm(τi ) ,
i ) m(τi )
and
√ n
nθi → θm(τi )
n
and lik
= l m(τi )k n−1/2
for k ∈ Km(τi )0 ,
as n → ∞ for i ∈ {0, 1, 2, . . .} and θm ∈ J , l m ∈ +,K0 for each m ∈ M.
Let Bi be a J -dimensional Brownian motion with drift rate θm(τi ) and covariance
, l ) and μ . The
matrix m(τi ) , where m is as given in (25) for λm(τi )k ≡ λmk (pm
m
m
Brownian motions B1 , B2 , . . . are independent and have initial position 0. Let
Km0
akj λmk pm
, lm l mk if akj = 0 for all k ∈ K\Km0 ,
k=1
s mj ≡
∞
if akj ≥ 1 for some k ∈ K\Km0 ,
and Sm ≡ (−∞, s m1 ] × · · · × (−∞, s mJ ]. Similarly to (29)–(30), suppose that
(Si , Xi ) jointly satisfy
Si (t) = Si (0) + Bi (t) − Xi (t) ∈ Sm(τi ) ,
Xi (0) = 0,
Xi non-decreasing,
∞
and
0
s m(τi )j − Sij (t) dXij (t) = 0,
j ∈J.
As in (31), we expect that
S n Xn
√i , √i
n
n
≈ (Si , Xi ),
Queueing Syst (2008) 60: 1–69
43
with initial conditions defined recursively as S0 (0) = 0 and Si (0) = Si−1 (τi − τi−1 ).
Let bm , m ∈ M, be the multipliers in Assumption 1 when the demand rate function
is λm and component costs are cm . Then, because (83) is very similar to (40), the
arguments in Sect. 3.2 hold for each time period [τi , τi+1 ), and so
n
˜ |m(0) = m, S0 (0) = S ≤ E |m(0)
˜
= m, S0 (0) = S
(84)
lim sup E n→∞
for
˜ =
∞
δ
−1
J
K
−δτ
−δτi+1
i
e
−e
cm(τi )j θm(τi )j −
bm(τi )k l m(τi )k
j =1
0=1
−
∞ τi+1
e−δt δ
i=0 τi
K
k=1
pm(τ
q Si (t), L
i )k k
k=1
J
hj ij Si (t), L + δxm(τi )j Xij (t) dt.
+
j =1
Note that when m(0) = m, S0 (t) follows a multidimensional normal distribution
with mean vector θ and covariance matrix t conditioned to be in the region Sm . Let
ft be the associated probability density function. Then, observe that
˜
E |m(0)
= m, S0 (0) = S
J
K
−δτ −1
1
=δ 1−E e
cmj θmj −
bmk l mk − H(m, S, θm , l m )
+
0
∞
e−δt
j =1
M
m =1
wmm
k=1
J
˜
E |m(0)
= m, S0 (0) = S ft (S ) dS P (τi ∈ dt)
where, for Lmk = λmk (p , l )l mk , k ∈ Km0 ,
H(m, S, θ, l)
K
τ
q (S (t), L ) dt
δ k=1 pmk
m
k 0
−δt
dt m(0) = m,
e
=E
J
+ j =1 (hj ij (S0 (t), Lm ) dt + δxmj X0 (t))
0
S0 (0) = S .
This motivates the definition
⎛
⎞
δ −1 (1 − E[e−δτ1 ])( Jj=1 cmj θj − K
k=1 bmk l k )
⎜
⎟
⎜ − H(m, S, θ, l)
⎟
⎜
⎟.
V(m, S) =
max
- ∞ −δt M
⎜
⎟
+,K
+ 0 e ( m =1 wmm J V(m , S )ft (S ) dS ) ⎠
θ∈
J ,l∈
0 ⎝
× P (τi ∈ dt)
(85)
44
Queueing Syst (2008) 60: 1–69
The set (m, S) that is analogous to (47) consists of all θ ∈ J and l ∈ +,K0
that maximize the right-hand side of the expression for V(m, S). The expression (84)
suggests that, analogous to Theorem 1, if the cost of expediting in each period is high,
so that
J
−1
−1
xmj > max akj pmk + δ
akm hm
for all j ∈ J ,
(86)
k:akj >0
m=1
then
n
˜ |m(0) = m, S0 (0) = S ≤ V(m, S)
lim sup E n→∞
for each m ∈ M and S ∈ .
6.3 An asymptotically optimal policy
The proposed policy for setting prices, maximum leadtimes and component production rates for each time period [τi , τi+1 ) is exactly that in Sect. 4:
θi l i
=p √ ,√ ,
n
n
θ
l
lin = l √i , √i ∨ r n ,
n
n
θ
l
μni = μ √i , √i ,
n
n
pin
(87)
(88)
(89)
according to the solution of the perturbed static planning problem in (17)–(19) with
√
√
√
perturbation (θi / n, l i / n ∨ r n ) where (θi , l i ) ∈ (m(τi ), Si (τi+1 − τi )/ n).
Assembly and expediting follow the proposed policy in (59) and (60), modified
to start at time τi , i ∈ {0, 1, 2, . . .}, and using the shortage process Sin defined
in (82), the demand rate function λnm(τi ) , component production costs cm(τi ) , and
prices, maximum leadtimes, and component production rates (pin , lin , μni ) specified
above.
In each time period [τi , τi+1 ), we observe the dimensionality reduction in Proposition 3, so that
S̃in , X̃in , Q̃ni , I˜in
⇒
Si , Xi , q (Si , Lm(τi ) ), i (Si , Lm(τi ) ) ,
, l )l for k ∈ K , and, similar to Proposition 4,
where Lmk = λmk (pm
0m
m mk
n
˜ |m(0) = m, S(0) = S = V(m, S).
lim E n→∞
Hence Theorem 2 holds: under the assumption (86) that the expediting cost in each
period is high, the proposed policy is asymptotically optimal.
Queueing Syst (2008) 60: 1–69
45
6.4 Systems with salvaging and expediting
We generalize our formulation in Sect. 6.1 to allow for salvaging of excess components, for a value per unit vm < cm when the system is in state m ∈ M. We also allow
for the expediting cost to be low, assuming only that xm > cm for each m ∈ M. The
process Vij (t) represents the cumulative number of components salvaged in [τi , t)
for t ∈ [0, τi+1 − τi ). The shortage process definition in (82) is modified to include
salvaging, so that
S0j (t) ≡ Sj (0) +
K
akj O0k (t) − C0j (t) − X0j (t) + V0j (t),
t < τ1 ,
k=1
K
Sij (t) ≡ Sij τi− +
akj Oik (t) − Cij (t) − Xij (t) + Vij (t),
t < τi+1 − τi .
k=1
The function V is defined as in (85) in Sect. 6.2, except that the definition of H
is modified as follows. Let m ∈ M, S ∈ J , θ ∈ J , l ∈ +,Km0 be given. Let B
be a Brownian motion with drift θ and covariance matrix m . Similarly to (71) in
Sect. 5.1, let X and V solve
⎤
⎛ K
⎡
⎞
δ k=1 pk qk (S(t), l)
τ
⎥
⎜
⎢
⎟
minE ⎣
e−δt ⎝ + Jj=1 hj ij (S(t), l) dt
⎠ m(0) = m, S(0) = S ⎦
X,V
0
+ Jj=1 xj dXj (t) − vj dVj (t)
(90)
subject to
X, V ∈ D [0, ∞), are non-decreasing, RCLL, adapted to B,
have X(0) = V (0) = 0,
and S(t) = S + B(t) − X(t) + V (t) ∈ Sm .
The function H(m, S, θ, l) now denotes the optimal objective value in (90).
The proposed policy sets prices, maximum leadtimes, and component production
rates as in (87)–(89), with (m, S) defined using the modified definition of the function V. The cumulative number of orders assembled, starting from time τi , is defined
as in Sect. 5.3, but using the demand function λm(τi ) , the prices pin and leadtimes
lin defined in the first sentence of this paragraph, the order arrival process Oi , and
the shortage process Si defined in the first paragraph of this subsection. In each time
interval [τi , τi+1 ), the policy for dynamic expediting and salvaging is also defined as
in Sect. 5.3, but using the region Rm(τi ) .
7 Conclusions
This paper demonstrates that realistically complex models of assemble-to-order systems become analytically tractable under the assumption that a high volume of
46
Queueing Syst (2008) 60: 1–69
prospective customers arrive per unit time. That assumption is valid in many, if not
most, application contexts. By assuming a high volume of potential demand, we have
derived a policy for setting prices, maximum leadtimes and nominal component production rates, and then dynamically sequencing orders for assembly and managing
component inventory through expediting and salvaging, which maximizes expected
profit asymptotically. The proposed policy extends in a straightforward manner to allow prices, maximum leadtimes and nominal component production rates to change
in response to periodic, random shifts in the demand function and production costs.
We also have developed useful approximations for expected profit and the distribution
of order queues and component inventory levels under the proposed policy.
These approximations are useful in developing managerial insight. For example,
joint optimal control of assembly sequencing and component inventory (as compared
to FIFO assembly and independent control of each component, which is common in
the literature and in practice, due to its simplicity) significantly increases expected
profit, especially when physical component inventory costs and the discount rate are
large. Secondly, when prospective customers are heterogeneous, with a sufficiently
strong positive correlation between impatience and willingness to pay a high price,
so that the system manager should price-discriminate based on leadtime, the manager
of an assemble-to-order system has a strong financial incentive to prevent prospective customers from learning about the distribution of actual leadtimes. Rather than
provide exact leadtime information, the manager should, if possible, quote only a
maximum leadtime and consistently fill patient customers’ orders early, in strictly
less than the maximum leadtime, in order to realize revenue early.
The main technical contribution of the paper is to provide an asymptotic optimality
proof when the expediting cost is large enough that the system manager should only
expedite components when strictly necessary, to satisfy leadtime promises. The most
important insight coming out of this analysis is that the dimensionality of the system
state is greatly reduced, and equals the number of components. This is important
because most assemble-to-order systems are designed to support a large number of
products K with relatively few components J .
Acknowledgements We thank Joshua Reed for programming the algorithm of Kumar and Muthuraman [17], and numerically solving the relevant Brownian control problem to produce Fig. 2. This research
was supported in part by the National Science Foundation under Grant PECASE-0239840.
Appendix
In this technical appendix we provide the proofs for all the results stated in the manuscript titled: “Optimal Control of a High-Volume Assemble-to-Order System with
Maximum Leadtime Quotation and Expediting.” The organization is such that the
proposition and theorem proofs appear first, in the order of their appearance in the
paper, and then the lemma proofs. The numbering of all the equations in this technical
appendix begins after the number of the last equation, (90), in the main paper body.
The numbering of all the references is consistent with the reference list at the end of
the main paper body. We often refer to the functional central limit theorem (FCLT)
Queueing Syst (2008) 60: 1–69
47
and the functional strong law of large numbers (FSLLN), and a convenient reference
for these is Billingsley [5], Chen and Yao [8], or Whitt [35].
Proof of Proposition 1 From Definition 1, any asymptotically optimal policy has
n
˜ ≥ c,
lim inf E n→∞
for c a finite constant. Dividing both sides of the above inequality by
√
n shows
n
˜
lim inf E √ ≥ 0.
n→∞
n
(91)
From (7) and the fact that (3) requires physical inventory levels to be non-negative,
K
∞
J
O n (t) Cjn (t)
n
−δt
n k
δe
pk
cj
≤
−
dt
n
n
n
0
j =1
k=1
∞
−
δe
−δt
0
K
Qn (t)
pkn k
n
k=1
+
J
xj
Xjn (t)
j =1
n
dt.
(92)
We will use the following linear program to upper-bound the right-hand side of (92)
f (p, B) ≡
min
K
Q≥0,X≥0
pk Qk +
J
(93)
xj X j
j =1
k=1
subject to
K
akj Qk + Xj ≥ Bj ,
j ∈J.
(94)
k=1
The equivalent evolution equations for the shortage process in (4) and (5), and the
constraint (3) that physical inventory levels are non-negative imply that for all t > 0
K
akj Qnk (t) + Xjn (t) ≥
k=1
K
akj Okn (t) − Cjn (t),
j ∈J.
(95)
k=1
Then, it follows from the definition of f in (93)–(94) that for all t > 0
K
pkn Qnk (t) +
J
xj Xjn (t) ≥ f p n , B n (t)
j =1
k=1
for B n (t) = (B1n (t), . . . , BJn (t)) and
Bjn (t) =
K
k=1
akj Okn (t) − Cjn (t),
j ∈J.
(96)
48
Queueing Syst (2008) 60: 1–69
Since for any r > 0
f (p, rB) = rf (p, B),
the inequalities (92) and (96) imply
n
≤
n
∞
δe
−δt
0
K
O n (t)
pkn k
k=1
∞
−
0
n
−
J
cj
Cjn (t)
j =1
n
dt
B n (t)
dt.
δe−δt tf p n ,
nt
(97)
The FSLLN establishes
Okn (t)
− λk p n , l n t → 0,
n
k ∈ K,
and
Cjn (t)
n
− μnj t → 0,
j ∈J,
a.s., u.o.c., as n → ∞. Therefore, from (97), also integrating over t > 0 and using the
definition of f in (93)–(94),
n
n
˜
= lim inf
− δ −1 π
lim inf √
n→∞
n→∞
n
n
K
J
−1
pkn λk p n , l n −
cj μnj
≤ lim inf δ
n→∞
j =1
k=1
−f p ,
n
K
akj λk p n , l n − μnj , j ∈ J
−π
k=1
⎞
n
n n
minQ≥0,X≥0 K
k=1 pk (λk (p , l ) − Qk )
⎜
⎟
⎜ − Jj=1 (cj μnj + xj Xk ) − π
⎟
⎜
⎟
−1 ⎜
⎟,
= lim inf δ ⎜ subject to
⎟
n→∞
K
⎜ K
⎟
n
n
n
⎝
k=1 akj Qk + Xj ≥
k=1 akj λk (p , l ) − μj , ⎠
⎛
j ∈J
a.s. Recall that xj > cj . By comparing the linear program in the above display to the
static planning problem in (8)–(9), we conclude
˜n
lim inf √ ≤ 0 a.s.
n→∞
n
From (91), the above display, and bounded convergence,
n
˜n
˜n
˜
lim inf E √ = E lim inf √ ≤ 0 ≤ lim inf E √ ,
n→∞
n→∞
n→∞
n
n
n
Queueing Syst (2008) 60: 1–69
49
which implies E[lim infn→∞
˜n
√
] = 0.
n
We conclude
˜n
lim inf √ = 0, a.s.,
n→∞
n
which occurs if and only if
pn → p ,
ln → l,
and μn → μ
as n → ∞, because (p , l , μ ) is the unique optimal solution of the static planning
problem. The stated result follows.
Proof of Proposition 2 From Proposition 1, we can assume without loss of generality
that as n → ∞
pn → p ,
ln → l,
and μn → μ ,
and so, also recalling the definition of θ n in (23), for any > 0, for large enough n,
θ n < and max lkn − lk < .
k∈K
For any prices p n , maximum leadtimes l n , and capacity μn ,
K
J
pkn λk p n , l n −
cj μnj ≤ π θ n , l n ,
j =1
k=1
and so from Assumption 2, for large enough n,
K
K0
J
J
pkn λk p n , l n −
cj μnj ≤ π +
cj θjn −
mk lkn .
j =1
k=1
j =1
k=1
Also using the representation of diffusion-scaled profit in (40) and the non-negativity
of the inventory process, we find
˜n≤
∞
δe
−δt
0
+
K
pkn Õkn (t) −
nδ
−1
J
cj θjn
j =1
∞
−
δe
0
for large enough n.
−δt
cj C̃jn (t)
j =1
k=1
√
J
K
k=1
−
K0
dt
mk lkn
k=1
pkn Q̃nk (t) +
J
j =1
xj X̃jn (t)
dt
(98)
50
Queueing Syst (2008) 60: 1–69
Recall the definition of the linear program f (p, B) for p ∈ +,K and B ∈ J in
(93)–(94) in the proof of Proposition 1. The bound (95) (also located in the proof of
Proposition 1) implies that for all t ≥ 0
K
n (t)
K
J
n (t)
C
O
j
k
pkn Q̃nk (t) +
xj X̃jn (t) ≥ f p n ,
akj √
− √ ,j ∈ J
.
n
n
j =1
k=1
k=1
The above display, (98) and Lemma 1 show
n
˜
lim sup E n→∞
⎛√
K0
nδ −1 ( Jj=1 cj θjn − k=1
mk lkn )
⎝
≤ lim sup
-∞
Okn (t)
√ −
n→∞
− 0 δe−δt E[f (p n , ( K
k=1 akj
n
⎞
Cjn (t)
√ ,j
n
∈ J ))] dt
⎠ , (99)
where Fubini justifies the interchange of limit and expectation because f is nonnegative. Also, f (p, B) is convex in B, and so by Jensen’s inequality
K
n
Okn (t) Cj (t)
n
E f p ,
akj √ − √ , j ∈ J
n
n
k=1
≥f p , E
n
K
k=1
n
Okn (t) Cj (t)
akj √ − √
,j ∈ J
.
n
n
Noting that
K
k=1
n
K
√
Okn (t) Cj (t) akj √
akj Õkn (t) − C̃jn (t) + θ n nt,
− √ =
n
n
k=1
where θ n is as defined in (23), since the FCLT implies Õkn , k ∈ K, and C̃jn , j ∈ J , all
converge to mean zero Brownian motions, we conclude from (99) that
J
K0
n
√
˜ ≤ δ −1 lim sup n
lim sup E cj θjn −
mk lkn − f p n , θ n , (100)
n→∞
n→∞
j =1
k=1
also noting that f (p, rB)
rf (p, B) for any p ∈ +,K , B ∈ J , and scalar r. Fi=
J
n
nally, since pk → pk > j =1 akj cj for all k ∈ K from (13), there exists > 0 such
that cj + ≤ xj for all j ∈ J and pkn > Jj=1 akj (cj + ) for all k ∈ K for large
enough n, and so
J
J
(cj + ) max θjn , 0 − Xj +
xj X j
f pn , θ n ≥
j =1
≥
J
(cj + ) max[0, θj ]
j =1
j =1
Queueing Syst (2008) 60: 1–69
51
for large enough n. We conclude from (100) that
J
J
K0
n
√ −1
n
n
˜ ≤ δ lim sup
lim sup E n
cj θ j −
mk lk − (cj +
) max[0, θj ] .
n→∞
n→∞
j =1
j =1
k=1
√ ni
ni θj → ∞ for any j ∈ J , (101) implies
n
˜ i = −∞,
lim sup E (101)
For any subsequence ni having
ni →∞
and so such a policy cannot be asymptotically optimal. For any subsequence ni hav√
√
ing ni θjni → −∞ for any j ∈ J , and on which lim supni →∞ ni [θmni ]+ < ∞ for
all m = j , again from (101),
n
˜ i = −∞.
lim sup E ni →∞
We conclude that any asymptotically optimal policy has
√ lim sup nθ n < ∞.
(102)
n→∞
√
We now argue that any asymptotically optimal policy also has lim supn→∞ nlkn <
∞ for all k ∈ K0 and complete the proof. Without loss of generality, we can assume
(102) holds for any asymptotically optimal policy. Since 0 ≤ lkn for all n and k ∈ K
and, from Assumption 2, the multipliers mk > 0 for all k ∈ K0 , the bound (101) im√ n
plies that on any subsequence {ni } having ni lk i → ∞ as ni → ∞ for any k ∈ K,
also
n
˜ = −∞,
lim sup E n→∞
meaning such a policy cannot be asymptotically optimal.
Proof of Theorem 1 We first relax the requirement that the expediting process be
non-decreasing. Specifically, we require only that
jn (t) ≡ Xjn (t) − Xnj (t) ≥ 0,
j ∈J.
˜ n can be represented in terms of n as follows:
From (40), K
∞
J
n
−δt
n n
n
˜
δe
pk Õk (t) −
cj C̃j (t) dt
=
0
+
√
nδ
−1
j =1
k=1
K
pkn λk
J
n n p ,l −
cj μnj − π
j =1
k=1
∞
−
e
0
0
K
δpkn Q̃nk (t) +
k=1
∞
−
−δt
e−δt δxj
J
j =1
Xnj (t)
√
n
J jn (t)
n
˜
dt
hj Ij (t) + δxj √
n
j =1
dt.
(103)
52
Queueing Syst (2008) 60: 1–69
From the constraint (1) that orders for product k must be assembled within maximum
leadtime lkn , and the evolution equation for the queue-length process (2),
Qnk (t) ≤ Okn (t) − Okn t − lkn ,
and so for γ defined in (49)–(51) and S n defined in (54),
δ
K
pkn Q̃nk (t) +
J
j =1
k=1
jn (t)
hj I˜jn (t) + δxj √
n
S n (t) Okn (t) − Okn (t − lkn )
≤ γ pn , √ ,
,k ∈ K .
√
n
n
(104)
Observe that arranging queues and inventory levels according to the solution of γ at
all times t > 0 may result in an assembly process that both increases and decreases,
and so the bound (104) also relaxes the constraint that the assembly process is nondecreasing. Because without loss of generality we may assume
√ n
√ n
nθ → θ ∈ J and
nl → l ∈ +,K0 ,
(105)
by Proposition 2, the bound (104), Assumption 1, Lemma 1, and the representation
˜ n in (103),
for n
˜
lim sup E n→∞
≤ δ −1
J
cj θ j −
j =1
− lim sup E
n→∞
+δ
J
j =1
0
K0
bk l k
k=1
n
n
Ok (t) − Okn (t − lkn )
−δt
n S (t)
e
γ p , √ ,
, k ∈ K0
√
n
n
∞
X nj (t)
xj √
dt .
n
(106)
Consider any sequence n on which (105) holds. On this sequence, because the FCLT
establishes
√
1 √ Okn (·) − Okn · − lkn = Õkn (·) − Õkn · − lkn + nlkn λk p n , l n
n
⇒ l k λk (p , l ),
k ∈ K0 ,
as n → ∞, Lemma 3 shows
n
S Xn O n (·) − Okn (· − lkn )
√ ,√ , k
√
n
n
n
⇒ Sθ,l , Xθ,l , l 1 λ1 (p , l ), . . . , l K0 λK0 (p , l ) ,
Queueing Syst (2008) 60: 1–69
53
as n → ∞, where (Sθ,l , Xθ,l ) solve (29)–(30). The continuous mapping theorem then
implies
n
∞
J
n
Xj (t)
Ok (t) − Okn (t − lkn )
−δt
n S (t)
+δ
e
xj √
γ p , √ ,
, k ∈ K0
dt
√
n
n
n
0
j =1
∞
J
−δt
e
xj Xθ,l,j (t) dt
γ p , Sθ,l , l k λk (p , l ), k ∈ K0 + δ
⇒
0
=
∞
e
0
j =1
−δt
δ
K
pk qk
J
Sθ,l (t) dt +
hj ij Sθ,l (t) + δxj Xθ,l,j (t) dt,
j =1
k=1
(107)
as n → ∞, where the equality follows from Lemma 2. Fatou’s Lemma, (106), (107),
and the definition of D in (46) then imply
n
˜ ≤ D(θ, l),
lim sup E n→∞
which implies the stated upper bound.
Proof of Proposition 3 In preparation for the proof of Proposition 3, we require several lemmas that establish asymptotic properties of our proposed policy. The first
lemma, which follows from Lemma 9 by Ata and Kumar [2], bounds the number
of orders and components that arrive in a review period and bounds the number of
orders that arrive within a maximum leadtime period.
Lemma 7 (Ata and Kumar [2]) Let r n = n−β be as defined in (58). Under the proposed policy, for any positive finite constant c, as n → ∞,
!
"
P
max n max Okn ir n − Okn (i − 1)r n − nλk p n , l n r n < cn1−β → 1,
i∈{1,...,T /r } k∈K
!
P
max
max Okn ir n − lkn − Okn (i − 1)r n − lkn
i∈{1,...,T /r n } k∈K
"
− nλk p n , l n r n < cn1−β → 1,
"
!
P
max n max Cjn ir n − Cjn (i − 1)r n − nμnj r n < cn1−β → 1,
i∈{1,...,T /r } j ∈J
!
P
max n max Okn ir n − Okn (i + 1)r n − lkn
i∈{1,...,T /r } k∈K
"
− nλk p n , l n lkn − r n < cn1−β → 1.
We next show that the constraint (64) requiring the proposed assembly process to
be non-decreasing is not binding in high volume.
Lemma 8 Let T > 0. Under the proposed policy, as n → ∞,
P Qn ir n = qn S n ir n , Lni for all i ∈ 0, 1, . . . , T /r n → 1,
where Lni is as defined in (66).
54
Queueing Syst (2008) 60: 1–69
We also require a probabilistic upper bound on the cumulative number of components our proposed policy expedites. Our next lemma shows that, with arbitrarily
n
high probability in high volume, X defined in (79) expedites more than the pron
posed expediting policy X . This is intuitively true because the expediting process X
maintains the shortage process in a smaller region for each n than does Xn .
Lemma 9 Let T > 0. Under the proposed policy, as n → ∞,
n
P Xn (t) ≤ X (t) for all t ≥ 0 → 1.
n
n
Finally, we show that the process (S , X ) defined in (79)–(80) weakly converges
to reflected Brownian motion under diffusion-scaling.
Lemma 10 Under the proposed policy,
n n
S , X ⇒ (Sθ,l , Xθ,l ),
as n → ∞.
n
n
Proof of Proposition 3 Let (S n , X n ) be as defined in (53)–(54) and (S , X ) be as
defined in (79)–(80). Under the proposed policy, by Lemma 4,
√ n
√ n
√ n
nθ → θ ,
nlk → l k for k ∈ K0 , and
nlk → ∞ for k ∈ K\K0 ,
(108)
and so from Lemmas 3 and 10,
(S n , Xn )
⇒ (Sθ ,l , Xθ ,l )
√
n
n
and
n
S ,X
⇒ (Sθ ,l , Xθ ,l ),
√
n
(109)
as n → ∞. On any sample path ω ∈ satisfying
n
X n (t) ≤ X (t)
for all t > 0,
noting that Xn is the minimal cumulative amount of expediting required to satisfy
quoted maximum leadtimes so that
Xn (t) ≤ X n (t)
for all t > 0,
it follows from the evolution equation for the shortage process in (4) that
n
S (t) ≤ S n (t) ≤ S n (t)
for all t > 0.
Therefore,
n
Xn
X
√ − Xθ ,l ≤ X̃ n − Xθ ,l ≤ √ − Xθ ,l n
n
and
n
S
Sn
√ − Sθ ,l ≤ S̃ n − Sθ ,l ≤ √ − Sθ ,l ,
n
n
Queueing Syst (2008) 60: 1–69
55
and so the weak convergences in (109) imply
n n
S̃ , X̃ ⇒ (Sθ ,l , Xθ ,l )
as n → ∞.
Since assembly only occurs at discrete review time points,
t
t
n
n
n
Qnk (t) = Qk
r
+
O
,
(t)
−
O
k
k
n
r
rn
(110)
k ∈ K,
and so for Sθ ,l defined in (29)–(30) and Lk ≡ λk (p , l )l k
1 n
sup √ Qk (t) − qk Sθ ,l (t), L n
0≤t≤T
1
√ (Qn ( tn r n ) + O n (t) − O n ( tn r n ))
k
k r
n k r
1 n
t
n (S n ( t r n ), Ln
n
n
n
= sup − √1n q,k
n
t ) + √n q,k (S ( r n r ), L t ) r
rn rn 0≤t≤T − q (S (t), L )
k
≤
max
i∈{1,...,T /r n }
+ n−1/2
θ ,l
n n n 1 n
S ir , Li √ Qnk ir n − q,k
n
max n Okn (i + 1)r n − Okn ir n − nλk p n , l n r n i∈{1,2,...,T /r }
+ n1/2−β λk p n , l n
1 n
t
n
n
+ sup √ qk S
r , L t − qk Sθ ,l (t), L .
rn
n
rn
0≤t≤T
Lemmas 7 and 8 imply the first two terms on the right-hand side of the above expression weakly converge to 0 as n → ∞. Therefore, to complete the proof, it is sufficient
to show that for any T > 0,
1 n
t
n
n
sup √ qk S
(111)
r , L t − qk Sθ ,l (t), L ⇒ 0
rn
rn
n
0≤t≤T
as n → ∞.
To see (111), first observe that when n−1/2 S n → S, n−1/2 Ln → Lk , k ∈ K0 , and
−1/2
n
Ln → ∞, k ∈ K\K0 , then
1 √ qn , in S n , Ln → q (S, L )
n
(112)
as n → ∞. To find the convergence (112),
√ we are also using the fact that under the
proposed policy p n → p , l n → l , and nlkn → l k for k ∈ K0 (from Lemma 4), and
so
n−1/2 λnk p n , l n lkn − nr n → Lk ,
56
Queueing Syst (2008) 60: 1–69
as n → ∞, because also n−1/2 nr n = n1/2−β → 0 as n → ∞ since β > 1/2 by assumption. Then, asymptotically, the penalty term in the objective (61)
K0
+
Qk − n−1/2 λnk p n , l n lkn − nr n
=0
ζ
k=1
for any feasible solution. Next, the definition of Lni in (66) implies that for any t > 0,
Lnt/r n ,k
= Õkn
√
n
−
⇒
t
t
n
n
n
n
r − Õk
+ 1 r − lk
rn
rn
√ n λk (p n , l n ) 1/2−β
n
+ λk p n , l n
nlk
|λ(p , l )|
Lk ,
∞,
k ∈ K0 ,
k ∈ K\K0 ,
(113)
as n → ∞. The weak convergence in (113) follows because (1) the FCLT guarantees
Õ n weakly converges to a continuous limit process and r n → 0, lkn → 0, k ∈ K0 , as
n →√
∞, (2) n1/2−β → 0 because by assumption β > 1/2, and (3) p n → p , l n → l ,
and nlkn → l k , k ∈ K0 , as n → ∞ under the proposed policy. We conclude from
the weak convergence of the shortage process established in (110), the convergence
of n−1/2 qn in (112), the weak convergence of Ln in (113), and a generalization of
the continuous mapping theorem (see, for example, Theorem 1.5.2 in the Internet
Supplement to Whitt [35]) that
1 √ qn , in S n , Ln ⇒ (q , i )(Sθ ,l , L ),
n
(114)
as n → ∞. Therefore, the weak convergence in (111) is valid and under the proposed
policy
(Qn , I n )
⇒ q (Sθ ,l , L ), i (Sθ ,l , L )
√
n
as n → ∞.
˜ n in (40). Lemma 1 estabProof of Proposition 4 Consider the representation for lishes that the expected value of the first term on the right-hand side converges to 0.
Under the proposed policy,
K
k=1
J
pkn λk p n , l n −
cj μnj = π n−1/2 θ , n−1/2 l ∨ r n .
j =1
√
Because β < 1/2 by assumption, n(n−1/2 l ∨ r n ) → l as n → ∞, and so Assumption 1 establishes that the second term on the right-hand side of (40) converges
Queueing Syst (2008) 60: 1–69
57
K0
to Jj=1 cj θj − k=1
bk l k . Proposition 3 and the continuous mapping theorem show
the weak convergence of the third term on the right-hand side of (40)
K
∞
J
−δt
n n
n
n
hj I˜ (t) + δxj X̃ (t) dt ⇒ H(θ , l ),
e
δp Q̃ (t) +
0
k
k
j
j
j =1
k=1
as n → ∞. Therefore, to show
n
˜ = D(θ , l )
lim E n→∞
and complete the proof, it is sufficient to establish the uniform integrability of the
families {X̃ n }, {Q̃n }, and {I˜n }.
At each time point ir n , the expediting process X n (defined in (59)) is bounded by
+
K
n
n
n
n
n
n
Xj ir ≤ max
akj Ok (m + 1)r − Cj mr
, j ∈J,
m=1,...,i
k=1
and so, for any t > 0, for each j ∈ J ,
+
K
n
Okn (s + r n ) Cj (s)
n
X̃j (t) ≤ sup
akj
− √
√
n
n
0≤s≤t
k=1
≤
K
akj
k=1
+
K
sup
0≤s≤t+r n
n √
Õ (s) + sup C̃ n (s) + t nθ n
k
j
j
0≤s≤t
akj λk p n , l n n1/2−β .
k=1
Therefore, from Lemma 1, for each j ∈ J , the family
∞
δe−δt X̃jn (t) dt, n ≥ 0
(115)
0
is uniformly integrable.
Because assembly only occurs at review time points and constraint (63) in the
proposed assembly policy upper-bounds the queue-level at each review time point,
t
t
n
n
n
n
n
r + Ok (t) − Ok
rn
Qk (t) = Qk
n
r
rn
− t
n
n
−
l
≤ Okn (t) − Okn
+
1
r
.
k
rn
Under diffusion-scaling, the above inequality implies
− t
n
n
+
1
r
+ λk p n , l n n1/2−β
−
l
Q̃nk (t) ≤ Õkn (t) − Õkn
k
n
r
√ n n n
+ nλ p , l lk .
58
Queueing Syst (2008) 60: 1–69
Uniform integrability of
∞
0
δe−δt Q̃nk (t) dt, n ≥ 0 ,
k ∈ K,
√
then follows from Lemma 1, and the fact that Lemma 4 guarantees nlkn → l k as
n → ∞.
The representation of the diffusion-scaled shortage
- ∞ process in (36), Lemma 1, and
the previously argued uniform integrability of { 0 δe−δt X̃jn (t) dt, n ≥ 0} for j ∈ J
-∞
imply { 0 δe−δt |S̃jn (t)| dt, n ≥ 0} is a uniformly integrable family for each j ∈ J .
The representation of the shortage process in terms of queue-lengths
and inventory
-∞
levels in (5) and the just shown uniform integrability of { 0 δe−δt Q̃nk (t) dt, n ≥ 0}
for each k ∈ K then implies the families
∞
δe−δt I˜jn (t) dt, n ≥ 0 , j ∈ J
0
are uniformly integrable, which completes the proof.
Proof of Theorem 2 This is immediate from Theorem 1 and Proposition 4.
Proofs of Lemmas
Proof of Lemma 1 Lemma 1 follows immediately from Lemma 4 in Plambeck and
Ward [28].
Proof of Lemma 2 We first substitute for Ij and write the linear program γ in (49)–
(51) in the form
K
K
J
pk Qk +
akj Qk + j − Sj + δxj j
min δ
hj
Q≥0,
≥0
k=1
j =1
k=1
subject to
K
akj Qk + j − Sj ≥ 0,
j ∈ J , Qk ≤ Lk , k ∈ K0 .
k=1
The linear program γ has a finite optimal solution (Q , ) because it is assumed
feasible and the objective function is bounded below by 0. Therefore, its dual
max
η≥0
J
S j ηj −
j =1
K0
ηJ +k Lk
k=1
subject to
J
j =1
aj k ηj − ηJ +k ≤ δpk +
J
j =1
hj akj ,
k ∈ K0 ,
Queueing Syst (2008) 60: 1–69
59
J
aj k ηj ≤ δpk +
J
j =1
hj akj ,
k ∈ K − K0 ,
(116)
j =1
ηj ≤ hj + δxj ,
j ∈J,
also has a finite optimal solution η .
> 0 for some m ∈ J . We will derive a contradiction. If Q < L
Suppose that m
k
k
for some k ∈ K0 with akm > 0 then the complementary slackness condition
ηJ +k (Qk − Lk ) = 0
implies ηJ +k = 0, and with (116) implies
δpk +
J
akj (hj − ηj ) ≥ 0.
j =1
Furthermore, from the above inequality and because the dual solution is non-negative,
1
1
ηm − hm ≤
akj (hj − ηj ) + δpk ≤
akm hm + δpk . (117)
akm
akm
j =m
j =m
The complementary slackness condition
m
(ηj − hj − δxj ) = 0
implies
δxm = ηm
− hm .
(118)
We conclude from (117) and (118) that
1
akm hm + δpk ,
δxm ≤
akm
j =m
which contradicts (52). Finally, consider the case that Qk = Lk for all k ∈ K0 with
K0
= 0. Our assumption S ≤
akm > 0. Define j = j∗ for j = m, m
m
k=1 akm Lk
guarantees that (Q , ) is feasible. The objective value at (Q , ) is strictly lower
than at (Q , ), which contradicts the optimality of (Q , ). We conclude = 0 in
any optimal solution.
Proof of Lemma 3 For each j ∈ J , recalling the definition of θ n in (23), let
K
+
√ n
n
n
n
χ̃j (t) ≡ sup
akj Õk (s) − C̃j (s) + nθj s − s j ,
0≤s≤t
B̃jn (t) ≡
S̃jn (t) ≡
K
(119)
k=1
akj Õkn (t) − C̃jn (t) +
k=1
B̃jn (t) − χ̃jn (t),
t > 0.
√ n
nθj t,
(120)
(121)
60
Queueing Syst (2008) 60: 1–69
Since χ̃jn increases only when s j − S̃jn = 0, we can write S̃ n and χ̃ n using the oblique
reflection mapping as follows:
s − S̃ n , χ̃ n = s − B̃ n , s − B̃ n .
√
The functional central limit theorem and the assumption that nθ n → θ as n → ∞
imply
B̃ n ⇒ B,
as n → ∞, where B is a Brownian motion with drift θ and covariance matrix defined in (25). Therefore, because and are Lipschitz continuous on D J (see,
for example, Theorem 14.2.7 in Whitt [35]), the continuous mapping theorem shows
s − S̃ n , χ̃ n ⇒ (s − Bθ ), (s − Bθ ) ,
as n → ∞, and so, for (S, X) a RBM satisfying (29)–(30), as n → ∞,
n n
S̃ , χ̃ ⇒ (S, X).
(122)
Observe from the definition of S n in (54), Õkn in (34) for k ∈ K, and C̃jn in (35)
for j ∈ J , that
K
S nj (t) Xnj (t)
n
n
n√
akj Õk (t) − C̃j (t) + θj nt − √
√ =
n
n
k=1
=
S̃jn (t) +
Xnj (t)
n
χ̃j (t) − √
.
n
From the definition of Xn in (53),
⎡ K
⎤+
√ n
n
n
k=1 akj Õk (s) − C̃j (s) + nθj s
Xnj (t)
K
√
⎢
⎥
√ = sup ⎣ − k=1 akj nlkn λk (p n , l n )
⎦ .
n
K
0≤s≤t
n
n
n
+ k=1 akj (Õk (s − lk ) − Õk (s))
(123)
(124)
(125)
For j such that akj = 0 for all k ∈ K\K0 ,
K
√
akj nlkn λk p n , l n → s j < ∞.
(126)
k=1
Because lkn → 0 for all k ∈ K0 and the FCLT establishes Õkn weakly converges to a
continuous limit process,
(127)
max sup Õkn s − lkn − Õkn (s) ⇒ 0,
k∈K0 0≤s≤t
as n → ∞. We conclude from the definition of χ̃jn in (119), (125), (126), and (127)
that
Xj
χ̃jn − √ ⇒ 0,
(128)
n
Queueing Syst (2008) 60: 1–69
61
as n → ∞, for j such
√ that akj = 0 for all k ∈ K\K0 . For j such that akj ≥ 1 for some
k ∈ K\K0 , because nlkn → ∞ for k ∈ K\K0
Xnj
√ ⇒0
n
(129)
as n → ∞. We conclude from the convergence in (122), the representation (123), the
weak convergence in (128) and (129), and the fact that s j = ∞ implies χ̃jn is the zero
process that
n
S Xn
⇒ (S, X),
√ ,√
n
n
as n → ∞, where (S, X) is as in (122), a RBM satisfying (29)–(30).
Proof of Lemma 4 The proof is by contradiction. First observe that because the solution to the perturbed static planning problem must satisfy constraint (19),
√ n −1/2 −1/2 nlk n
θ ,n
l ∨ r n ≥ l k ∨ n1/2−β ≥ l k for all k ∈ K0 ,
because β < 1/2 by assumption. Therefore, if the limit
√ n −1/2 −1/2 nlk n
θ ,n
l ∨ r n → lk ,
k ∈ K0
fails to hold, there must exist an index k̂ ∈ K0 , a subsequence n̂ → ∞ and a constant
w > l such that
k̂
√ (130)
n̂lk̂ n̂−1/2 θ , n̂−1/2 l ≥ w
for all n̂. Consider the alternative perturbation with w substituted for l , that
k̂
is, l̂ k = l k for k = k̂, k ∈ K0 and l̂ k̂ = w. Inequality (130) guarantees that for
all n̂, the solution to the perturbed static planning problem with perturbation
(n̂−1/2 θ , n̂−1/2 l ) is also a solution to the perturbed static planning problem with
perturbation (n̂−1/2 θ , n̂−1/2 l̂), and so
π n̂−1/2 , n̂−1/2 lˆ = π n̂−1/2 θ , n̂−1/2 l .
From Assumption 1,
√ √ n̂ π n̂−1/2 θ , n̂−1/2 lˆ − π = n̂ π n̂−1/2 θ , n̂−1/2 l − π
→
J
cj θj −
j =1
K0
bk l k
(131)
k=1
as n̂ → ∞. But Assumption 1 also tells us that
J
√ n̂ π n̂−1/2 θ , n̂−1/2 lˆ − π →
cj θj − bk̂ w −
j =1
<
J
j =1
which contradicts (131).
bk l k
k∈K0 \{k̂}
cj θj −
K0
bk l k ,
k=1
62
Queueing Syst (2008) 60: 1–69
Proof of Lemma 5 We can write
f (S1 , S2 ) = F (S1 , S2 ) − h1 S1 − h2 S2
(132)
where
F (S1 , S2 ) ≡ min
Q
K
δpk
2
+
akj hj Qk
j =1
k=1
K
subject to:
akj Qk ≥ Sj ,
j = 1, 2,
k=1
0 ≤ Qk ≤ λ∗k dk ,
Defining pk ≡ δpk +
2
j =1 akj hj ,
k = 1, . . . , K.
(133)
the dual for problem (133) is
g(S1 , S2 ) ≡ max S1 Y1 + S2 Y2 −
Y,W
K
λ∗k dk Wk
k=1
subject to: ak1 Y1 + ak2 Y2 − Wk ≤ pk ,
Y ≥ 0,
k = 1, . . . , K,
W ≥ 0,
which reduces to
g(S1 , S2 ) ≡ max S1 Y1 + S2 Y2 −
Y
K
λ∗k dk
0 ∨ (ak1 Y1 + ak2 Y2 − pk )
k=1
subject to: Y ≥ 0.
In the feasible region (S1 , S2 ) ∈ (−∞, s 1 ] × (−∞, s 2 ], because for any feasible Q
K
pk Qk ≥ S1 Y1 + S2 Y2 −
k=1
K
λk dk 0 ∨ (ak1 Y1 + ak2 Y2 − pk )
k=1
for any feasible Y , and Y = (0, 0) is always feasible, there exists a finite optimal solution Y (S1 , S2 ). Since S2 multiplies Y2 only, increasing S2 causes Y2 (S1 , S2 ) to either
remain constant or increase, which implies Y1 (S1 , S2 ) will either remain constant or
decrease. Therefore, Y1 (S1 , S2 ) decreases with S2 and Y2 (S1 , S2 ) decreases with S1 .
∂g
∂g
decreases with S2 , and ∂S
decreases with S1 . The desired result
We conclude ∂S
1
2
follows from strong duality.
Proof of Lemma 6 In a purposeful slight abuse of notation, we let (qn , in )(S) denote
a solution to the linear program in (75)–(76). Consider a sample path ω ∈ on which
%
&
Qn ir n = qn S n ir n
for all i ∈ 0, 1, . . . , T /r n ,
max n max Okn ir n − Okn (i + 1)r n − lkn − nλk p n , l n lkn − r n < n1−β .
i∈{1,...,T /r } k∈K
Queueing Syst (2008) 60: 1–69
63
On such a sample path, because the proposed expediting policy ensures
K
! !
""
S n ir n ≤
,
akj λnk p n , l n lkn − nr n 1 + max λk p n , l n
k∈K
k=1
avoiding the penalty ζ is feasible and so
!
n n !
""
n
q,k
S ir
≤ λnk p n , l n lkn − r n 1 + max λk p n , l n
,
k∈K
k ∈ K.
Furthermore, for all k ∈ K, and all i ∈ {0, 1, . . . , T /r n },
Okn ir n − Okn (i + 1)r n − lkn ≥ nλk p n , l n lkn − r n − n1−β
!
"
≥ nλk p n , l n lkn − nr n 1 + max λk p n , l n
≥
n
q,k
n n S ir .
Therefore, as in (67), for all 0 ≤ t ≤ T ,
An,k (t) ≥ Okn t − lkn
k∈K
for all k ∈ K.
Arguments very similar to those in the proof of Lemma 8 show
%
&
P Qn ir n = qn S n (ir n ) for all i ∈ 0, 1, . . . , T /r n
→ 1.
Lemma 7 then completes the proof.
Proof of Lemma 7 The first three inequalities are very similar to Lemma 4.1 in Plambeck and Ward [28], except that the review period length has a different order of
magnitude, that depends on the number of moments assumed on the order and component inter-arrival times (2 + 2
1 for 1 > 0). We show the proof for the first inequality and omit that for the next two. From Lemma 9 and bound (113) on the residual
inter-arrival times at the start of a review period in Ata and Kumar [2], and for C2 (
)
defined for > 0 as in [2], directly after (104),
"
!
P
max n max Okn ir n − Okn (i − 1)r n − nλk p n , l n r n > cn1−β
i∈{1,...,T /r } k∈K
1−β
C2 ( cnnr n )
T
≤ n K
∼ nβ(2+
1 )−(1+
1 ) → 0,
r
(nr n )1+
1
as n → ∞, from the assumption that β < (2 + 1 )−1 (1 + 1 ). For the last inequality,
we first separate out the cases that k ∈ K0 and k ∈ K\K0 :
!
P
max n max Okn ir n − Okn (i + 1)r n − lkn
i∈{1,...,T /r } k∈K
"
− nλk p n , l n lkn − r n > cn1−β
64
Queueing Syst (2008) 60: 1–69
≤P
!
max Okn ir n − Okn (i + 1)r n − lkn
max
i∈{1,...,T /r n } k∈K0
"
− nλk p n , l n lkn − r n | > cn1−β
!
+P
max n max Okn ir n − Okn (i + 1)r n − lkn
i∈{1,...,T /r } k∈K\K0
"
− nλk p n , l n lkn − r n > cn1−β .
For k ∈ K\K0 , again using Lemma 9 and bound (113) in [2]
!
max Okn ir n − Okn (i + 1)r n − lkn
max
P
i∈{1,...,T /r n } k∈K\K0
"
− nλk p n , l n lkn − r n > cn1−β
≤ (K − K0 )
cn1−β
n
n
k∈K\K0 lk −r )
C2 ( n(max
(n(maxk∈K\K0 lkn
)
− r n )1+
1 )
∼ nβ(3+2
1 )−(1+
1 ) → 0,
as n → ∞, from the assumption that β < (3 + 2
1 )−1 (1 + 1 ). For k ∈ K0 such that
l k = 0, because constraint (19) binds in the solution to the perturbed static planning
problem, lkn = r n , and so
Okn ir n − Okn (i + 1)r n − lkn − nλk p n , l n lkn − r n = 0
for all n. It then follows that
P Okn ir n − Okn (i + 1)r n − lkn − nλk p n , l n lkn − r n > cn1−β = 0. (134)
Therefore, from (134) and Lemma 9 and bound (113) in [2],
!
P
− max Okn ir n − Okn (i + 1)r n − lkn
max
i∈{1,...,T /r n } k∈K
"
− nλk p n , l n lkn − r n > cn1−β
3
∼ nβ(3+2
1 )− 2 (1+
1 ) → 0,
as n → ∞.
Proof of Lemma 8 At any given review time point ir n , i ∈ {1, . . . , T /r n }, adding
the constraint (64) can only increase the optimal objective value, and so
Queueing Syst (2008) 60: 1–69
δ
K
65
K0
J
n
n n n n n
n
n +
n
ir + ξ
q,k ir − nλk p , l lk − nr
ir
+
hj i,j
n
pk q,k
k=1
j =1
k=1
≤δ
K
K0
n n +
Q,k ir − nλk p n , l n lkn − nr n
pk Qn,k ir n + ξ
k=1
+
J
k=1
n
n
ir .
hj I,j
j =1
Therefore, whenever
n
n
q,k
ir ≤ Okn ir n − An,k (i − 1)r n
(135)
for all k ∈ K so that constraint (64) is satisfied,
n n n n n n n n = q ir , i ir
Q ir , I ir
is an optimal solution to the linear program in (61)–(64), and therefore is chosen by
the proposed policy.
To complete the proof, it is sufficient to show that as n → ∞,
P bound (135) is satisfied for all i ∈ 0, 1, . . . , T /r n → 1.
Let
1
1
α = min λk (p , l )
K
k∈K 2
κ(2 k=1 akj + 3)
and consider a sample path ω ∈ on which
max n max Okn (i + 1)r n − Okn ir n − λk p n , l n nr n < αn1−β ,
i∈{0,1,...,T /r } k∈K
max
(136)
max Okn (i + 1)r n − lkn − Okn ir n − lkn − λk p n , l n nr n i∈{0,1,...,T /r n } k∈K
< αn1−β ,
max
max C n (i + 1)r n − C n ir n − μj nr n < αn1−β .
i∈{0,1,...,T /r n } j ∈J
j
j
(137)
(138)
We use mathematical induction to show that on any sample path ω ∈ satisfying
(136)–(138), (135) holds for i ∈ {0, 1, . . . , T /r n }. The application of Lemma 7
then completes the proof.
From the Lipschitz continuity of qn , letting κ be the Lipschitz constant, and the
n (r n ) ≤ K a O n (r n ), for any k ∈ K,
fact that for any j ∈ J X,j
k=1 kj k
n
n
Okn r n − q,k
ir
"
!
n n n
≥ λk p , l nr − αn1−β − κ max Sjn r n ∨ max Ln1,k
j ∈J
k∈K
66
Queueing Syst (2008) 60: 1–69
≥ λk (p n , l n )nr n − αn1−β
K
n n
n
− κ max
akj Ok r + Cj r + X,j r − κ max Ln
j ∈J
k∈K
k=1
1,k
K
n n n
1−β
≥ λk p , l nr − καn
akj + 3
2
=n
1−β
k=1
λk (p n , l n )
−
ακ
2
akj + 3
|λ |2/3
K
k=1
> 0 = An,k (0),
where the strict inequality holds for large enough n because λk (p n , l n ) → λk for any
k ∈ K under the proposed policy. We conclude (135) holds for large enough n. Next,
assume Qn (ir n ) = q (S n (ir n ), Lni ) so that An (ir n ) = O n (ir n ) − q (S n (ir n ), Lni ).
Then, the Lipschitz continuity of qn and the fact that
K
n n
n
(i + 1)r n − X,j
ir ≤
akj Okn (i + 2)r n − lkn − Okn (i + 1)r n − lkn
X,j
k=1
implies
Okn (i + 1)r n − qk S n (i + 1)r n , Lni+1
= Okn (i + 1)r n − Okn ir n
+ qk S n ir n , Lni − qk S n (i + 1)r n , Lni+1 + An,k ir n
≥ λk p n , l n nr n − αn1−β + An,k ir n
!
"
− κ max Sjn (i + 1)r n − Sjn ir n ∨ max Lni+1,k − Lni,k j ∈J
k∈K
K
≥ λk p n , l n nr n − αn1−β κ 2
akj + 3 + An,k ir n
> An,k
n
ir ,
k=1
for large enough n, for all k ∈ K, i ∈ {0, 1, . . . , T /r n }.
Proof of Lemma 9 On any sample path ω ∈ having
Qnk
n
ir = qn S n ir n , Lni
T
for all i ∈ 1, 2, . . . , n ,
r
Queueing Syst (2008) 60: 1–69
67
constraint (64) is inactive at each review time point and so for each i ∈ {1, 2, . . . ,
T /r n },
K
n
n
n
n
n
n
n
n
n
X,j ir = max X,j (i − 1)r ,
.
akj Ok (i + 1)r − lk − Cj ir
k=1
Recalling that Xn (0) = 0, the above recursion shows
n
X,j
n
ir =
max
m∈{1,...,i}
K
akj Okn
+
n
n
n
n
(i + 1)r − lk − Cj ir
k=1
for each i ∈ {1, 2, . . . , T /r n }. If the sample path ω ∈ additionally has
max n max Okn ir n − Okn (i + 1)r n − lkn − nλk p n , l n lkn − r n < nr n
i∈{0,1,...,T /r } k∈K
so that
!
!
""
− − nλk p n , l n lkn − nr n 1 + max λk p n , l n
> Okn (i + 1)r n − lkn
− Okn ir n
k∈K
for each k ∈ K and i ∈ {1, 2, . . . , T /r n }, then
K
n
X,j
ir n = max
akj Okn ir n − Cjn ir n
m∈{1,...,i}
+
K
+
n n n
n −
n
akj Ok (i + 1)r − lk
− Ok ir
k=1
≤
k=1
max
m∈{1,...,i}
−
K
K
akj Okn ir n − Cjn ir n
k=1
!
!
""
akj nλk p n , l n lkn − nr n 1 + max λk p n , l n
+
k∈K
k=1
n
= Xj ir n .
Lemmas 7 and 8 then complete the proof.
n
n
Proof of Lemma 10 Recall the definitions of X and S in (79) and (81), and the
definitions of χ̃ n , B̃ n , and S̃ n in (119), (120), and (121) in the proof of Lemma 3.
Observe that for any i ∈ {0, 1, 2, . . .},
n
X j (ir n )
√
n
⎡ K
⎢
= max ⎣
m=1,...,i
√ n ⎤+
n
n
n
n
k=1 akj Õk (mr ) − C̃j (mr ) + nθj
√
⎥
n n n
⎦
− K
k=1 akj ( nλk (p , l )lk
1/2
n
n
n
− n r (1 + maxk∈K λk (p , l )))
68
Queueing Syst (2008) 60: 1–69
and
n
n
S j (t)
Xj (t/r n r n )
√ = B̃jn −
√
n
n
n
X j ( rtn r n )
n
n
.
= S̃j (t) + χ̃j (t) −
√
n
For any T > 0
n
Xj (t/r n r n ) → 0,
sup χ̃jn (t) −
√
n
0≤t≤T
√
as n → ∞, since nλk (p n , l n )lkn → λk (p , l )l k and n1/2 r n = n1/2−β → 0 as
n → ∞. The desired result follows from the weak convergence of (S̃ n , χ̃ n )
in (122).
References
1. Afeche, P.: Incentive compatible revenue management in queueing systems: Optimal strategic idleness
and other delaying tactics. Working Paper (2004)
2. Ata, B., Kumar, S.: Heavy traffic analysis of open processing networks with complete resource pooling: Asymptotic optimality of discrete review policies. Ann. Appl. Probab. 15, 331–391 (2005)
3. Bassamboo, A., Harrison, J.M., Zeevi, A.: Design and control of a large call center: Asymptotic
analysis of an LP-based method. Oper. Res. 54, 419–435 (2006)
4. Benjaafar, S., El Hafsi, M.: Production and inventory control of a single product assemble-to-order
system with multiple customer classes. Manag. Sci. 52, 1896–1912 (2006)
5. Billingsley, P.: Convergence of Probability Measures, 2nd edn. Wiley, New York (1999)
6. Browne, S., Whitt, W.: Piecewise-linear diffusion processes. In: Dshalalow, J. (ed.) Advances in
Queueing: Theory, Methods, and Open Problems, pp. 463–480. CRC, Boca Raton (1995)
7. Brynjolfsson, E., Smith, M.D.: Frictionless commerce? A comparison of Internet and conventional
retailers. Manag. Sci. 46, 563–585 (2000)
8. Chen, H., Yao, D.D.: Fundamentals of Queueing Networks: Performance, Asymptotics, and Optimization. Springer, New York (2001)
9. Cheng, F., Ettl, M., Lin, G., Yao, D.D.: Inventory-service optimization in configure-to-order systems.
Manuf. Serv. Oper. Manag. 4, 114–132 (2002)
10. Cho, I.-K., Meyn, S.P.: The dynamics of the ancillary service prices in power networks. In: Proc. 42nd
IEEE Conference on Decision and Control, vol. 3, pp. 2094–2099 (2003)
11. Constantinides, G.M., Richard, S.F.: Existence of optimal simple policies for discounted-cost inventory and cash management in continuous time. Oper. Res. 26, 620–636 (1978)
12. Dai, J.G., Williams, R.J.: Existence and uniqueness of semimartingale reflecting Brownian motions
in convex polyhedrons. Theory Probab. Appl. 50, 3–53 (1995)
13. Glasserman, P., Wang, Y.: Leadtime-inventory tradeoffs in assemble-to-order systems. Oper. Res. 46,
858–871 (1998)
14. Harrison, J.M., Taksar, M.I.: Instantaneous control of Brownian motion. Math. Oper. Res. 8, 439–453
(1983)
15. Haws, K.L., Bearden, W.O.: Dynamic pricing and consumer fairness perceptions. J. Consum. Res. 33,
304–311 (2006)
16. Katta, A.K., Sethuraman, S.: Prising strategies and service differentiation in queues—a profit maximization perspective. Working Paper, Columbia University (2005)
17. Kumar, S., Muthuraman, M.: A numerical method for solving singular stochastic control problems.
Oper. Res. 52, 563–582 (2004)
18. Kushner, H.J.: Control and optimal control of assemble-to-order manufacturing systems under heavy
traffic. Stoch. Stoch. Rep. 66, 233–272 (1999)
Queueing Syst (2008) 60: 1–69
69
19. Kushner, H.J., Dupuis, P.G.: Numerical Methods for Stochastic Control Problems in Continuous Time.
Springer, New York (1992)
20. Kushner, H.J., Martins, L.F.: Numerical methods for singular stochastic control problems. SIAM J.
Control Optim. 29, 1443–1475 (1991)
21. Lawson, D., Porteus, E.: Multistage inventory management with expediting. Oper. Res. 48, 878–893
(2000)
22. Lu, Y., Song, J.S., Yao, D.D.: Order fill rate, leadtime variability and advance demand information in
an assemble-to-order system. Oper. Res. 51, 293–308 (2003)
23. Maglaras, C., Celik, S.: Dynamic pricing and leadtime quotation for a multi-class make-to-order queue
2005. Working Paper
24. Netessine, S.: Dynamic pricing of inventory/capacity with infrequent price changes. Eur. J. Oper. Res.
174, 553–580 (2006)
25. Perman, S.: Automate or die. Business 2.0 (2001)
26. Plambeck, E.: Asymptotically optimal control for an assemble-to-order system with capacitated component production and fixed transport costs, 2005. Oper. Res. (2008, forthcoming)
27. Plambeck, E., Kumar, S., Harrison, J.M.: Asymptotic optimality of a single server queueing system
with constraints on throughput times. Queueing Syst. 39, 23–54 (2001)
28. Plambeck, E., Ward, A.R.: Optimal control of a high-volume assemble-to-order system. Math. Oper.
Res. 31, 453–477 (2006)
29. Plambeck, E., Ward, A.R.: Note: A separation principle for a class of assemble-to-order systems with
expediting. Oper. Res. 55, 603–609 (2007)
30. Reiman, M.I.: The heavy traffic diffusion approximation for sojourn times in Jackson networks.
In: Disney, R.L., Ott, T.J. (eds.) Applied Probability-Computer Science, The Interface. Birkhauser,
Boston (1982)
31. Sethi, S.H., Yan, S.H., Zhang, H.: Inventory models with fixed costs, multiple delivery modes, and
forecast updates. Oper. Res. 51, 321–338 (2003)
32. Song, J.S.: On the order fill rate in a multi-item base-stock inventory system. Oper. Res. 46, 831–845
(1998)
33. Song, J.S., Xu, S., Liu, B.: Order fulfillment performance measures in an assemble-to-order system
with stochastic leadtimes. Oper. Res. 47, 131–149 (1999)
34. Song, J.S., Zipkin, P.: Supply chain operations: Assemble-to-order and configure-to-order systems. In:
Handbooks in Operations Research and Management Science, Supply Chain Management, vol. XXX,
Chap. XIII (2003)
35. Whitt, W.: Stochastic-Process Limits. Springer, New York (2002)