ANALYSIS OF SYNCHRONIZATION IN MOBILE SENSOR
NETWORKS USING TIME-VARYING POLES
A thesis by
Gangadhar Vuppuluri
Bachelor of Technology, Jawaharlal Nehru Technological University, 2012
Submitted to the Department of Electrical Engineering and Computer Science
and faculty of the Graduate School of
Wichita State University
in partial fulfillment of
the requirements for the degree of
Master of Science
December 2014
© Copyright 2014 by Gangadhar Vuppuluri
All Rights Reserved
ANALYSIS OF SYNCHRONIZATION IN MOBILE SENSOR
NETWORKS USING TIME-VARYING POLES
The following faculty members have examined the final copy of this thesis for form and content,
and recommend that it be accepted in partial fulfillment of the requirement for the degree of
Master of Science with a major in Electrical Engineering
___________________________________________
Animesh Chakravarthy, Committee Chair
___________________________________________
James Steck, Committee Member
___________________________________________
Hyuck Kwon, Committee Member
iii
DEDICATION
To my parents who believe in the richness of learning
iv
ACKNOWLEDGEMENTS
I would like to express my special appreciation and thanks to my advisor Dr. Animesh
Chakravarthy for his patience, motivation and immense knowledge. Without his guidance and
incessant help this thesis would not have been possible.
I would also like to express my hearty gratitude to Dr. James Steck, Dr. Hyuck Kwon
for serving as my thesis committee members, who have spent their valuable time towards me and
my defense. I also want to thank you for letting my oral thesis defense be an enjoyable moment
and for your brilliant comments and suggestions.
My deepest thanks to my family for their boundless love and encouragement throughout
my journey. I would also like to thank all my friends who supported me to strive towards my
goal.
v
ABSTRACT
Time Synchronization is an important feature in mobile sensor networks since it leads
to more efficient data fusion, more efficient power saving schemes and more efficient access of
the communication medium. The objective of time synchronization in a network is to provide a
common time scale for the local clocks of all the nodes in the network. In this thesis, the problem
of time synchronization in mobile sensor networks is modeled as an interconnection of Linear
Time-Varying (LTV) systems operating over a graph. It is well known that in the case of Linear
Time-Invariant Systems operating over a graph, the eigenvalues of the graph Laplacian provide
useful information regarding the convergence of the network. This paper explores the use of
time-varying analogs, i.e. LTV poles obtained using a factorization approach, in analyzing LTV
systems interacting over a graph. The influence of simultaneous power transmit control and
synchronization is also studied, and it is observed that in some regions of the parameter space,
power transmit control can speed up synchronization, while in other regions of the parameter
space, it can slow down synchronization.
vi
TABLE OF CONTENTS
Chapter
1.
INTRODUCTION...............................................................................................................1
1.1
1.2
1.3
2.
2.4
2.5
2.6
2.7
Kamen’s Poles.......................................................................................................18
Canonical form representation of a time-varying system......................................22
3.2.1 Numerical Results......................................................................................23
POWER CONTROL IN SENSOR NETWORKS.............................................................30
4.1
4.2
5.
Need for Synchronization........................................................................................6
Challenges in Synchronization Techniques.............................................................8
Distributed time synchronization.............................................................................9
2.3.1 The synchronization algorithm..................................................................12
Time-invariant frequency synchronous network..................................................13
Time-varying frequency synchronous network....................................................14
Graph notation......................................................................................................15
Frequency asynchronous network........................................................................15
POLES OF LINEAR TIME-VARYING SYSTEM………………...…………………..18
3.1
3.2
4.
Wireless Sensor Networks.......................................................................................1
1.1.1 Origin and History.......................................................................................1
1.1.2 Working of a WSN………………………………………………………..2
Time-varying systems.…………………………………………………………….3
Thesis Overview…………………………………...………...…...….……….…...5
TIME-SYNCHRONIZATION IN SENSOR NETWORKS...............................................6
2.1
2.2
2.3
3.
Page
Importance of power control..................................................................................30
Need for power control..........................................................................................31
4.2.1 System formulation....................................................................................33
4.2.2 Distributed power control..........................................................................35
4.2.3 Numerical results.......................................................................................36
CONCLUSIONS...............................................................................................................42
LIST OF REFERENCES...............................................................................................................43
APPENDIX....................................................................................................................................49
vii
LIST OF FIGURES
Figure
Page
1.1
A typical WSN reporting an incident...................................................................................3
2.1
Advantage of synchronization in wireless networks over asynchronous networks.............7
2.2
Clocks for 3 nodes in case of (a) Uncoupled nodes (b) Frequency synchronized
nodes and (c) Fully synchronized nodes............................................................................11
2.3
Clock and timing phase......................................................................................................12
2.4
Categories of sensor network.............................................................................................17
3.1
Random trajectories of the nodes.......................................................................................24
3.2
Phase τ corresponding to the node trajectories of Fig 3.1.................................................24
3.3
LTV Right Poles corresponding to the node trajectories of Fig 3.1..................................26
3.4
LTV Modes corresponding to the node trajectories of Figure 3.1.....................................26
3.5
Phase τ corresponding to an oscillatory response..............................................................28
3.6
LTV Right Poles corresponding to an oscillatory response...............................................29
3.7
LTV Modes corresponding to an oscillatory response......................................................29
4.1
Power Control loops of transmitter-receiver pairs.............................................................32
4.2
Example of a cellular network...........................................................................................33
4.3
A comparison of the phases τ of the nodes with and without simultaneous power
transmit control..................................................................................................................37
4.4
A comparison of the LTV right-poles of synchronization with and without
simultaneous power transmit control.................................................................................38
4.5
A comparison of time-varying modes of synchronization with and without
simultaneous power transmit control.................................................................................38
4.6
A comparison of the phases τ of the nodes with and without simultaneous power
transmit control corresponding to an oscillatory response................................................39
4.7
A comparison of the LTV right-poles of synchronization with and without
simultaneous power transmit control corresponding to an oscillatory response...............40
4.8
A comparison of time-varying modes of synchronization with and without
simultaneous power transmit control corresponding to an oscillatory response...............40
viii
LIST OF FIGURES (continued)
4.9
τ with and without power transmit control (Synchronization is faster without
power transmit control)......................................................................................................41
ix
Chapter 1
INTRODUCTION
1.1
WIRELESS SENSOR NETWORKS
A Wireless Sensor Network (WSN) can be described as a group of nodes that operate
together and can be used to control or infer information of the surroundings by interaction between persons, computers or both [1]. Today, we have WSNs that are more
rugged, have longer life and are more cost effective when compared to those networks
when they were discovered. Many advances in communication, computing, sensing,
software and hardware design technologies have led to the increasing efficiency of
WSNs.
1.1.1
ORIGIN AND HISTORY
A majority of the advanced technologies existing today can have their origins traced
back to military applications. The first ever WSN was developed by the United
States military in the 1950s to detect and track submarines of the Soviet union [2].
This network was a submerged underwater network with acoustic sensors and hydrophones that were distributed across the Atlantic and Pacific oceans. However,
this technology is used even today for sensing volcanic activities and monitoring sea
life. Later in 1980, the United States Defense Advanced Research Project Agency
(DARPA), started a program called Distributed Sensor Network (DSN) to evaluate
1
the challenges in enforcing the wireless sensor networks. With this step, DSN made
its progress into applications like natural disaster prevention, weather estimation,
detection and tracking.
1.1.2
WORKING OF A WSN
A WSN comprises of ’nodes’ - ranging from a few to a large number of sensors. Each
node in the network is connected to one or more sensors. Every wireless network is
typically comprised of: a radio transceiver (transmitter + receiver), with an internal
or external antenna, an energy source and an electronic circuit that consists of a
microcontroller for interfacing with the sensors.
The scale of a WSN is huge, that ranges from that of a desktop computer down to
the size of a grain of sand. The cost of the sensor nodes similarly varies from a few
to thousands of dollars.
APPLICATIONS OF WSNs
Several sensor nodes are connected to each other in such a way that conditions such as
position, velocity, temperature, energy dissipation are exchanged among one another.
Area monitoring is the most common application of a WSN, wherein a network is
deployed over a region that is to be monitored. The WSNs are also being used in the
form of ’Body-area networks’ are used to collect information about an individual’s
health and fitness. WSNs are also used to monitor the condition of civil infrastructure
that are close to real time over long periods of time.
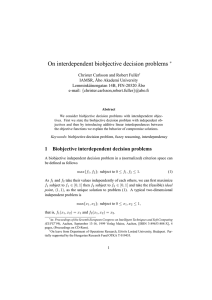
However, environmental/earth sensing is the extensive used application of a WSN.
The wireless networks are employed extensively in times of natural calamities to detect
the accurate area of the incident, that helps to take necessary preventive measures.
Fig. (1.1) shows how the sensor nodes form a network to convey data to a base
station.
2
Figure 1.1: A typical WSN reporting an incident [3]
WSNs are operated in two major types of architecture. They are Centralised architecture and Decentralised/Distributed architecture. If a centralised architecture is used
in a sensor network and the central node fails, then the entire network will collapse,
however the reliability of the sensor network can be increased by using a distributed
control architecture. Distributed control is used in WSNs because sensor nodes are
prone to failure. It is also used to collect data and to provide backup in case of any
failure of the central node.
1.2
TIME VARYING SYSTEMS
The mobility of the nodes makes the wireless sensor network a time varying system.
In this thesis, we consider the system to be a discrete time varying system. The
general form of equations for a discrete time varying system is given as
3
X(k + 1) = A(k)X(k) + B(k)U (k),
Y (k) = C(k)X(k) + D(k)U (k)
where X(k) is the system state, U (k) is the control input, Y (k) is the system output,
A(k), B(k), C(k) and D(k) are matrices of relevant dimensions.
Many methods have been developed to study the properties of LTI (Linear Time Invariant) systems when compared to the study of LTV (Linear Time Variant) systems.
The study of properties like stability, controllability, observability in LTV systems requires a different approach from that used for LTI systems. For example, the stability
of an LTI system can be inferred by looking at the real part of the eigenvalues of matrix A. It is stable if and only if the real parts of all the eigenvalues are negative.
However, this approach is not valid in the case of LTV systems. There can be examples of many systems where the real parts of all the eigenvalues of A(k) are negative
at each k and the system is unstable. For time-invariant systems interacting over a
graph, the convergence properties are determined by an analysis of the conventional
poles of the system. It is well known that it is inaccurate to view an LTV system as a
sequence of LTI systems (i.e. use a ”frozen-time LTI” approximation), since doing so
can lead to incorrect information about the stability and performance properties of
the system. This is particularly true when the rate of change of the system dynamics
is of the same order of magnitude as the system dynamics itself. In general, LTV system analysis therefore requires a machinery entirely different from that used for LTI
systems. An initial step is taken towards examining the use of time-varying analogs,
i.e. examine whether LTV poles can be used to analyze the convergence properties of
time-varying systems interacting over a graph. Several notions of poles and zeros of
LTV systems have been discussed in the literature [4],[5],[6],[7]. For an LTI system,
use of the Laplace transform (for continous-time systems) or the z-transform (for
discrete-time systems) converts the system to an algebraic representation whose numerator and denominator can then be factorized in a conventional manner, to obtain
4
the poles and zeros of the system. For an LTV system however, use of the Laplace/ztransform does not (in general) convert the system to an algebraic representation;
therefore one notion [4] invokes the use of special factorization techniques that work
directly on the differential equations (for continuous-time systems) or the difference
equations (for discrete-time systems), to obtain the LTV poles and zeros. In another
notion [5], the concept of extended eigenvalues and eigenvectors (or x-eigenvalues and
x-eigenvectors) for LTV systems is introduced. This notion was further built upon [7]
by demonstrating that performing a QR decomposition of the state transition matrix
of the LTV system can lead to the computation of the LTV poles of that system.
In other papers [6], the authors discuss the notions of Parallel D spectra and Series
D spectra to characterize features of LTV system dynamics. In this thesis, the LTV
poles that are obtained by using a factorization approach [4] are used to analyze LTV
systems interacting over a graph.
1.3
THESIS OVERVIEW
In this thesis, the problem of synchronization of mobile sensor nodes is modeled as
an LTV system.
Chapter (2) discusses the problem of time synchronization in mobile sensor networks.
Chapter (3), discusses the use of factorization approach to determine the LTV poles,
then use this approach to analyze the LTV poles associated with the synchronization
problem.
Chapter (4), discusses the importance of transmit power control in WSNs and analyze
the problem of synchronization and power control in a coupled manner. The LTV
poles of this coupled problem are used to analyze the rate at which synchronization
occurs, with and without simultaneous power transmit control.
Finally, in Chapter (5), the conclusion is presented. A scope for future work in this
area is also described.
5
Chapter 2
TIME SYNCHRONIZATION IN SENSOR
NETWORKS
In this chapter, we shall study the synchronization properties of the system using
graph theory by considering each node to be a discrete-time clock. The properties
of the sensor networks like limited energy, bandwidth and storage make the regular
synchronization methods unsuitable for distributed mobile sensor networks. Thus,
there is a tremendous increase in research on synchronization techniques for such
sensor networks.
2.1
NEED FOR SYNCHRONIZATION
The objective of time synchronization in a network is to provide a common time scale
for the local clocks of all the nodes in the network[8]. There are several reasons for
which time synchronization of sensors in a network is important:
(i) In data fusion applications, it is important that data arriving from different sensors
have a common time base. If the sensor clocks are not synchronized, the data obtained
from the sensors is virtually unusable.
(ii) Many energy-saving mechanisms in sensor networks require time synchronization,
so that the sensors can switch on and off at the correct time(s). The synchronization
techniques can be used to minimize the power, thereby increasing the lifetime of the
6
network [9]
(iii) When several nodes are trying to access the communication medium around
the same time, the presence of synchronization can help alleviate the possibility of
collisions. For instance, Fig. (2.1) is an illustration of this aspect [8]. For instance,
the synchronization techniques can be used to avoid packet collisions in a Packet
based synchronization technique, thereby improving spectral/energy efficiency and
avoids idle periods. Fig. (2.1) is an advantage of this aspect [10].
Figure 2.1: Advantage of synchronization in wireless networks over asynchronous
networks
Conventional timing synchronization involves the exchange of time information through
packets and is called as Packet-based synchronization[10]. However, the specific requirements of sensor networks like energy efficiency, scalability, reduced complexity
calls for alternative methods of synchronization. A Physical-layer based synchronization algorithm is a good alternative, where the basic idea is to build algorithms based
on exchange of pulses at physical layer, thereby reducing the level of processing at
packet stage [11] [12] [13].
In a wireless network with high node densities, the decentralized structure of the network poses a serious difficulty for synchronization. In [14], this problem is addressed
7
by a scheme wherein all clocks must synchronize to an arbitrary node in the network.
An optimal estimator is derived to determine the state of the ideal clock. The nodes
collaborate to generate an aggregate waveform that can be observed by all nodes,
which contains information to synchronize all nodes [14]. In pulse-connected networks, a clock model is proposed which can average out all random error and achieve
synchronization, as the number of the nodes grows exponentially. In this approach,
as explained in [15], all the nodes can see identical timing signals and maintain global
synchronization.
Synchronous periodic activities in biological systems such as flashing of fireflies, can
be established by studying physical layer based synchronization[11]. A bio-inspired
network synchronization protocol for large networks is proposed in [16]. Low complexity and scalability are the main advantages of this proposed protocol.
The
nodes of a system can be modeled in many ways like Integrate-and-fire[13],[11],
Leaky integrate-and-fire[17],[18], Exponential integrate-and-fire, Hodgkin-Huxley[18],
FitzHughNagumo[19], MorrisLecar, HindmarshRose.
2.2
CHALLENGES IN SYNCHRONIZATION TECHNIQUES
All the synchronization techniques are based on the fact that there is communication between the nodes of the sensor network. The dynamics of the system like
propagation time and physical access time influence the mechanism to achieve synchronization. A signal from a node undergoes delay by the time it reaches and gets
decoded by another node. The propagation time i.e the time required to propagate
the information between the interfaces of the receiver and transmitter and the time
required for the network interface of the receiver to receive the message are responsible for this delay. This delay prevents the receiver node from comparing the clocks
of the two nodes and synchronizing to the clock of the transmitting node [8]. The
time synchronization protocols are also a target of malicious antagonists who try to
8
disrupt the synchronization and disable the smooth functioning of a sensor network.
Such attacks have been analyzed and secure synchronization techniques are discussed
in [20].
The nodes that are a part of the network need to be mobile in order to carry out
suitable/required tasks. The mobility of the nodes requires higher energy consumption and better synchronization techniques when compared to the stationary nodes.
In a distributed control architecture there is no centralized body to synchronize all
the other nodes of the network. Thus, the mobile nodes must be self organised and
there is a need for efficient synchronization algorithms.
2.3
DISTRIBUTED TIME SYNCHRONIZATION
To ensure a common time-scale among the sensors in the network, a Distributed timesynchronization scheme is used. All the nodes modify their current clock based on
the average of the differences of timing phases measured with respect to other nodes.
Sensor networks being considered can be categorized into time-invariant and timevarying systems. The time-invariant and time-varying systems can again be classified
as synchronous and asynchronous. Each of these categorizations is explained below.
Let us assume that the wireless network comprises of K sensor nodes where each node
has a clock with period Tk . If the nodes are sequestered, the timing clock of the kth
sensor is tk (n) = nTk + τk (0), where τk (0) is the initial (arbitrary) timing-phase and n
is the number of periods in discrete time. There are two synchronization conditions
that are to be considered. We say that K clocks are frequency synchronized if
tk (n + 1) − tk (n) = T
(2.1)
for every k and sufficiently large value of n. 1/T is the common frequency.
Phase synchronization is the process by which two or more cyclic signals tend to oscil-
9
late with a repeating sequence of relative phase angles. Whereas, full synchronization
is attained if the clocks tick at the same time.
A more strict condition requires full i.e. frequency and phase synchronization:
t1 (n) = t2 (n) = · · · = tk (n); n → ∞
(2.2)
In Fig. (2.2), the clock at each node is represented by a periodic train of pulses
corresponding to time instants ti (n). In case nodes are uncoupled, i.e., no local timing
information is exchanged, the clocks remain asynchronous with generally different
local periods ti (n) − ti (n − 1) = Ti , and phases ti (n) ( Fig. (2.2)(a)). On the other
hand, if we allow each node, such as the ith, to gather information about the relative
time offsets, a synchronized state might be eventually achieved (Fig. (2.2) (b) and
(c))[10].
10
Figure 2.2: Clocks for 3 nodes in case of (a) Uncoupled nodes (b) Frequency synchronized nodes and (c) Fully synchronized nodes
To achieve physical-layer synchronization, the clocks of different sensors can be coupled by letting any node radiate a signal as shown in Fig.(2.3). A pulse is transmitted
at time tk (n) by the kth node and is received by other nodes. The power received by
the kth node, when power is transmitted from the ith node is given by
Pki (n) =
C
.Gki (n)
dγki
11
(2.3)
where C is a constant defined by
C=
p̂i GT GR
4π 2
(2.4)
that depends on the transmitted power p̂i of the ith node, the distance dki between
nodes k and i, the path loss exponent γ, and the antenna gains of the transmitter
and receiver GT and GR , respectively.
Figure 2.3: Clock and timing phase
Each node processes the received signal to estimate the time difference between its
clock and the clock of other nodes. i.e ti (n) − tk (n), i 6= k.
2.3.1
THE SYNCHRONIZATION ALGORITHM
For the synchronization procedure, we assume that each node can measure the time
difference based on the power of received signal. A practical implementation of this
procedure is shown in [21]. At the nth period, the kth node updates its clock tk (n)
according to the weighted sum of timing differences ∆tk (n + 1).
tk (n + 1) = tk (n) + .∆tk (n + 1) + Tk
(2.5)
where is the step size (0 < < 1). The algorithms in [22], [21] can be summarized
as equation (2.5).
A vector t(n) is defined such that t(n) = [t1 (n) · · · tK (n)]T and the vector of clock
12
periods i.e frequency is defined as T = [T1 · · · TK ]T . The difference equation (2.5) can
be represented as
t(n + 1) = A(n).t(n) + T
(2.6)
where A(n) is the K × K matrix such that [A(n)]ii = 1 − on the main diagonal and
[A(n)]ij = .αij (n), αij is given by the equation
αki (n) = PK
Pki (n)
j=1,j6=k
Pkj (n)
(2.7)
The selection of these weighting coefficients is based on algorithms in [23].
2.4
TIME-INVARIANT FREQUENCY SYNCHRONOUS NETWORK
A system is said to be time-invariant if its properties do not change with time. If
all the sensors in the wireless network are stationary, the system is considered to be
time-invariant. To study the convergence properties of the distributed time-invariant
system using synchronization algorithm, let us make the following assumptions:
(i) The network is frequency-synchronous i.e. T1 = T2 = T3 = · · · = TK
(ii) The network is time-invariant i.e. Pki (n) = Pki for any n and k 6= i.
Assumption (i) gives
tk (n) = nT + τk (n)
(2.8)
where τk (n) is the timing phase 0 ≤ τk (n) ≤ T of the kth node. By substituting
equation (2.5) in equation (2.8), the synchronization algorithm can be written as
τk (n + 1) = τk (n) + .∆τk (n + 1)
∆τk (n + 1) =
K
X
i=1,i6=k
13
αki (τi (n) − τk (n))
(2.9)
(2.10)
Now, defining a vector for timing phases of all nodes as τ (n) = [τ1 (n)....τK (n)], the
model becomes
τ (n + 1) = A.τ (n)
(2.11)
The system in equation (2.11) represents a multiagent coordination similar to the
example in [22]. The conditions of convergence can be determined by using properties
of graphs associated with the wireless network.
2.5
TIME VARYING FREQUENCY SYNCHRONOUS NETWORK
When the sensor nodes of the wireless network are mobile, the properties of the
system change with time, thereby making it a time-varying system. When the system
is frequency-synchronous (i.e. T1 = T2 = · · · = TK ), the equation can be written in
vector form as,
τ (n + 1) = A(n)τ (n)
(2.12)
where τ (n) is a vector of phases of the sensor node clocks. For a 4-node network, we
have A(n) given by the following
1
−
α
(n)
α
(n)
α
(n)
12
13
14
α21 (n) 1 − α23 (n) α24 (n)
A(n) =
α (n) α (n) 1 − α (n)
31
32
34
α41 (n) α42 (n) α43 (n) 1 − (2.13)
The time-varying dynamics of this system occur as a consequence of the movement
of the nodes - as this causes a change in the inter-node distance dki , which in turn
leads to a change in the received power Pki (refer Eqn (2.3)) and subsequently αki
(refer Eqn (2.7)).
14
2.6
GRAPH NOTATION
The synchronization algorithm can be viewed from a prospective of a weighted directed graph G = (V,E,A), where V is a set of nodes and E is a set of edges connecting
the nodes. The edge containing ith and jth nodes, i 6= j belongs to E if and only
if αij > 0. We should observe that the graph is directed (αij 6= αji for i 6= j). The
system matrix is given by
A = I − L
(2.14)
where L is the graph Laplacian of the network such that [L]ii = degree of node i
and [L]ij = −αij for i 6= j [22]. To understand the convergence properties of the
wireless network we need to understand the connectivity of the graph. A graph is
said to be strongly connected if there exists a path that links every pair of nodes.
For time-invariant systems, the distributed synchronization converges to a unique
cluster of synchronized nodes ,τ1 (n) = · · · = τk (n) = τ ∗ for n → ∞, if and only if
the directed graph is strongly connected. For time-varying systems, the distributed
synchronization converges to a unique cluster of synchronized nodes, if and only if
associated sequence of graphs are strongly connected across [n0 , ∞)[24].
2.7
FREQUENCY ASYNCHRONOUS NETWORK
In all the previous sections, it was assumed that all the nodes have the same clock
period T. However, different nodes might have different clock frequencies, in which
case the system is said to be frequency synchronous.
For a time-invariant scenario, it is observed that, if there is a frequency mismatch,
the algorithm in section 2.4 is able to synchronize the periods of the nodes but not
the timing phases so that the full synchronization condition is not achieved.
For a frequency-asynchronous time-invariant network, the matrix form of the equation
15
would be,
t(n + 1) = A · t(n) + T
(2.15)
The synchronization algorithm for this type of system is to denote a possible common
value for the clock period of all nodes to be T . Then, the clock of kth sensor for a
sufficiently large value of n can be written as
tk (n) = nT + τk (n)
(2.16)
Equation (2.16) can be written in vector form as t(n) = nT ·1+τ (n). The key interest
in such type of asynchronous networks is to determine if such common frequency 1/T
exists and if the phases τ (n) converge to a same value as n → ∞. A detailed analysis
of coupled analog oscillators is given in [25].
A time-varying frequency asynchronous network would have the representation;
t(n + 1) + A(n)t(n) + T
(2.17)
Thus,in summary the categories of sensor network based on synchronization can be
written as follows:
16
Figure 2.4: Categories of sensor network
The work in this thesis is focused on time-varying frequency synchronous sensor
networks.
17
Chapter 3
POLES OF LINEAR TIME VARYING SYSTEM
This chapter deals with the determination of the poles of Linear Time-Varying (LTV)
systems. In the case of Linear Time-Invariant (LTI) systems, use of Laplace transform of the system leads to an expression for the transfer function of the system. The
roots of the polynomial in the numerator are the zeros of the system while those of
the denominator are the poles of the system. However, in the case of LTV systems,
this approach is not feasible to compute the poles and zeros of the system because in
general it is not possible to compute the Laplace transform of LTV system. Several
notions of computing the time-varying poles have been examined in [5], [6], [7], [26].
3.1
KAMEN’S POLES
A method to calculate the poles and zeros for a linear time varying discrete-time
and continuous-time using a factorization approach is discussed [4]. For continuous
time-varying systems, the poles can be obtained by solving a non-linear time-varying
differential equation. For a discrete time-varying case, the poles are calculated recursively from a set of nonlinear algebraic equations.
For tutorial purposes, we first illustrate the method for a simple second order difference equation with time-varying coefficients.
18
y(n + 2) + a1 (n)y(n + 1) + a0 (n)y(n) = b(n)u(n)
(3.1)
where u(n) and y(n) represent the input and output at time n, respectively. Let z i
represent the i-step shift operator such that
z i f (n) = f (n + i)
(3.2)
Similarly, let a(n)z i denote an operator such that
[a(n)z i ]f (n) = a(n)f (n + i)
(3.3)
Equation (3.1) can be written using operator notation as
[z 2 + a1 (n)z + a0 (n)]y(n) = b(n)u(n)
(3.4)
The above equation is factorized as a non-commutative product ◦ of two first order
polynomials, by assuming that there exist functions p1 (n) and p2 (n) such that
[z 2 + a1 (n)z + a0 (n)]y(n) = [z − p1 (n)] ◦ [z − p2 (n)]y(n)
= [z − p1 (n)]{[z − p2 (n)]y(n)}
(3.5)
where ◦ is the usual polynomial multiplication except that z ◦ p2 (n) = p2 (n + 1).
By expanding the RHS of (3.5), we get
[z − p1 (n)] ◦ [z − p2 (n)] = z 2 − [p1 (n) + p2 (n + 1)]z + p1 (n)p2 (n)
19
(3.6)
From (3.5) and (3.6), we have
z 2 − [p1 (n) + p2 (n + 1)]z + p1 (n)p2 (n) = z 2 + a1 (n)z + a0 (n)
(3.7)
By equating the coefficients of z on both sides of the above equation, we arrive at:
p1 (n) + p2 (n + 1) = −a1 (n)
(3.8)
p1 (n)p2 (n) = a0 (n)
(3.9)
(p1 (n), p2 (n)) then form an ordered pole set for the LTV system (3.1) with p1 (n) called
the left pole and p2 (n) called the right pole [4]. From (3.8) and (3.9), a recursive
equation for the right pole can be written as:
p2 (n + 1) = −a1 (n) −
a0 (n)
p2 (n)
(3.10)
For general N − th order difference equations with time-varying coefficients of the
form
y(n + N ) + aN −1 (n)y(n + N − 1) + ... + a0 (n)y(n) = b(n)u(n)
(3.11)
the expression for computing the right poles is determined using a similar procedure
and written as:
pN (n + N − 1) = −aN −1 (n)
−
N
−2
X
ai (n)
p (n + N − 2)pN (n + N − 3) · · · pN (n + i)
i=1 N
−
a0 (n)
(3.12)
pN (n + N − 2)pN (n + N − 3) · · · pN (n)
From the above equation, we see that the right poles evolve from initial values defined
20
by pN (n0 ). Thus different initial conditions lead to different time histories of right
poles. The initial values of these poles are taken as equal to the LTI poles of the
given system evaluated at n0 . Let pN 1 (n), pN 2 (n), · · · pN N (n) be the set of right poles
calculated recursively from the initial conditions. From the set of right poles obtained
we can calculate the time-varying modes of the system, using
φp N i =
1,
if n = n0 .
(3.13)
pN i (n − 1)pN i (n − 2) · · · pN i (n0 ), n > n0 .
0,
otherwise
A time-varying N × N Vandermonde matrix is defined as
V (n) =
1
pN 1 (n)
pN 1 (n+1)pN 1 (n)
1
pN 2 (n)
pN 2 (n+1)pN 2 (n)
···
···
···
1
pN N (n)
pN N (n+1)pN N (n)
..
.
..
.
..
..
.
.
(3.14)
pN 1 (n+N −2)pN 1 (n) pN 2 (n+N −2)pN 2 (n) ··· pN N (n+N −2)pN N (n)
Now, from [4], if the determinant of V (n0 ) is nonzero, then for every value of y(n0 ),
y(n0 + 1), · · · y(n0 + N − 1) there exist constants c1 , c2 , · · · cN such that
y(n) =
n
X
ci φpN i (n, n0 )
(3.15)
i=1
and the constants c1 , c2 , · · · cN are computed from (3.16)
y(n0 )
y(n0 + 1)
..
.
y(n0 + N − 1)
= V (n0 )
21
c1
c2
..
.
cN
(3.16)
3.2
CANONICAL FORM REPRESENTATION OF A TIME-VARYING
SYSTEM
The discrete linear time varying dynamic system of form x(n + 1) = A(n)x, where
A(n) is a time-varying square matrix has to be converted into a controllable canonical
form. In [27], [28], a procedure to convert a continuous LTV system into a canonical
form is given. The system matrix for a controllable canonical form is as follows:
0
1
···
0
0
0
1
V (n) = .
..
..
..
.
.
−a0 (n) −a1 (n) · · ·
0
···
0
..
..
.
.
−aN −2 (n) −aN −1 (n)
(3.17)
In our case, a wireless network with four sensors is considered. The time-varying A
matrix is shown in equation (3.18). The entries of the time-varying A matrix are
obtained from equations (2.6) and (2.7).
1 − α12 (n) α13 (n) α14 (n)
α21 (n) 1 − α23 (n) α24 (n)
A(n) =
α (n) α (n) 1 − α (n)
31
32
34
α41 (n) α42 (n) α43 (n) 1 − (3.18)
The state space representation of the network with sensor nodes is given by
τ1 (n + 1)
τ2 (n + 1)
τ (n + 1)
3
τ4 (n + 1)
τ1 (n)
τ2 (n)
= A(n)
τ (n)
3
τ4 (n)
(3.19)
The difference equation for the system with 4 nodes can be obtained by recursive
22
substitution and elimination of the state equations in equation (3.19) in such a way
that the eventual difference equation consists of a single state. The difference equation
thus obtained is of the form:
τ1 (n + 4) + a3 (n)τ1 (n + 3) + a2 (n)τ1 (n + 2) + a1 (n)τ1 (n + 1) + a0 (n)τ1 (n) = 0 (3.20)
The canonical form matrix of this difference equation is given as shown in equation
(3.21)
0
1
0
0
0
0
1
0
C(n) =
0
0
0
1
−a0 (n) −a1 (n) −a2 (n) −a3 (n)
(3.21)
where a0 (n), a1 (n), a2 (n)anda3 (n) are as shown in Appendix.
These values of a0 (n), a1 (n), a2 (n), a3 (n) are substituted in the equation (3.12) to
evaluate a set of right poles by assuming appropriate initial conditions. The initial
conditions are taken as equal to the LTI poles of the sytem at initial time n0 . In other
words, the system is assumed to be time-invariant till time n0 , and time-varying after
n0 . Then, the associated modes are calculated for this system with four sensor nodes.
3.2.1
NUMERICAL RESULTS
We now illustrate the LTV poles on the synchronization of a time-varying sensor
network. A network with 4 mobile nodes moving with random velocities on a plane,
is considered and the distributed synchronization technique (2.12) is used to achieve
time synchronization between the nodes. Figure 3.1 shows the trajectories of the 4
nodes. Figure 3.2 is a plot of the phase τ for the nodes, with = 0.2. As expected,
the τ values converge to a common consensus value.
23
Figure 3.1: Random trajectories of the nodes
Figure 3.2: Phase τ corresponding to the node trajectories of Fig 3.1
We now analyze this convergence using the LTV poles discussed above. We first
convert equations (2.12) and (2.13) into the form of a difference equation with time-
24
varying coefficients having the following structure
τ1 (n + 4) + a3 (n)τ1 (n + 3) + a2 (n)τ1 (n + 2)
+a1 (n)τ1 (n + 1) + a0 τ1 (n) = 0
(3.22)
where τ1 (n) represents the phase of sensor 1, at discrete time n. Figure (3.3) shows
the LTV poles. There are four right poles p41 , p42 , p43 , p44 , all computed from the
following equation.
p4i (n + 3) = −a3 (n) −
a2 (n)
a1 (n)
−
p4i (n + 2) p4i (n + 2)p4i (n + 1)
a0 (n)
−
p4i (n + 2)p4i (n + 1)p4i (n)
(3.23)
and with initial conditions taken as equal to the LTI poles of the system at n = n0 .
The initial values of the LTI poles of the system computed at n0 are 1, 0.6, 0.94, 0.8.
p41 is the right pole that evolves from an initial value of 1. It can be seen that it
remains constant with a value of 1 throughout. This can also be inferred by looking
at (3.23), and keeping in mind that a0 (n) + a1 (n) + a2 (n) + a3 (n) = −1, for all n.
The other three right poles p42 , p43 and p44 however do show variation with time.
25
Figure 3.3: LTV Right Poles corresponding to the node trajectories of Fig 3.1
Figure 3.4 shows the four time-varying modes corresponding to the above LTV right
poles. While φ41 remains a constant, the other three modes φ42 , φ43 and φ44 show
variation with time, and eventually all reach a steady state value of 1. The superposition of these 4 modes using (3.15) does indeed lead to the τ1 plot shown in Figure
(3.2).
Figure 3.4: LTV Modes corresponding to the node trajectories of Figure 3.1
26
Thus, it is observed that the LTV right poles of this graph share one common feature
with the LTI poles of systems interacting over a time-invariant graph, i.e. in both
scenarios, one pole is equal to unity. However, while the LTI poles (whenever real)
can be arranged in ascending order, and the requirement of λ2 > 1 invoked in order to
ensure strong connectivity, such an ordering is not possible for the LTV right poles.
Figure 3.5 demonstrates a plot of τ for = 0.8. While this leads to convergence
as expected, it does so with an oscillatory response. For an LTI system, this would
necessarily mean that the system has complex poles, however for this LTV system
it is observed that the LTV right poles remain real for all time. The LTV modes
obtained from these poles, also remain real for all time, as is evidenced from Figure
3.7. Again, the superposition of these modes using (3.15) does indeed lead to an
accurate representation of τ1 (n) of Figure 3.5.
27
Figure 3.5: Phase τ corresponding to an oscillatory response.
28
Figure 3.6: LTV Right Poles corresponding to an oscillatory response.
Figure 3.7: LTV Modes corresponding to an oscillatory response.
29
Chapter 4
POWER CONTROL IN SENSOR NETWORKS
This chapter deals with the algorithms used for power control. The transmit power
in a wireless sensor network consisting of several nodes (transmitters and receivers)
is a key component for connectivity, interference and energy. An ingenious selection
of transmit power is necessary in order to improve the metrics like link data rate,
geographic coverage, network capacity, noise reduction. This chapter explains various
algorithms, models for efficient power control in a wireless sensor network.
4.1
IMPORTANCE OF POWER CONTROL
Control of transmit power helps with the following[29]:
(i) Connectivity: The strength of the signal received by the nodes has to be above
a certain threshold in order to ensure connectivity of the network. Power control
helps to ensure connectivity in the network, in the presence of time-variations and/or
uncertainties in the channel.
(ii) Avoiding interference: When signals are broadcast in a wireless communication environment, there is the possbility of interference since maintaining perfect
orthogonality among users in difficult. Power control can be used as a tool for efficient
usage of the spectrum.
(iii) Minimizing energy usage: Energy conservation is very important due to a
30
limited supply of power from the source and it is also crucial for the life of the network. Power control can be used to minimize the energy consumption.
(iv) Dynamic topology: In a wireless network, the transmit power of nodes can
be adjusted to construct a desired topology. Such topology control can enhance the
performance of the wireless network [30].
4.2
NEED FOR POWER CONTROL
A fundamental issue faced by a node in a wireless network is how to choose the level
of the power at which it should transmit. It is obvious that the power level with
which the transmitter transmits should be high enough so that the receiver receives
an appropriate amount of power. However, it should not transmit with too high a
power because the transmitted signal then might cause interference to other receivers
[31].
These issues make it evident that this is a feed-back based regulation problem. The
solution to this problem is a feed-back mechanism between the transmitter and the
receiver. The receiver can convey a feed back signal to the transmitter, to regulate its
transmitted power level, so that the SIR( Signal-to-Interference ratio) at the receiver
is at a desired level [32].
Another problem to be considered is when transmitter-receiver pairs operate simultaneously and have their own feedback loop (as shown in figure (4.1)). Based on its
own feedback, when a transmitter increases its power, this is interpreted as increased
interference at another receiver which is receiving a different transmission, thereby
inducing it to send a feedback to its transmitter to increase the power level. This coupling between the nodes results in each transmitter increasing its level of transmitting
power. Thus, there is a need for design of algorithms to assure the convergence of
power levels of all transmitters [32].
31
Figure 4.1: Power Control loops of transmitter-receiver pairs
This problem can be solved by distinguishing each transmitter-receiver pair in such
a way that the transmitter raises its power level depending on the SIR at its own
receiver.
Fig. (4.2)illustrates an example of a communication environment comprising of uplink
transmission from mobile station (MS) to base station (BS) and downlink transmission from BS to MS.
32
Figure 4.2: Example of a cellular network
4.2.1
SYSTEM FORMULATION
The purpose of this chapter is to perform an LTV pole analysis of scenarios wherein
synchronization and power transmit control occur simultaneously. The presence of
power transmit controls adds another layer of time-variation in αki (Eqn (2.7)) over
and above that caused by inter-node distance variation, since variations in p̂i now
cause C (Eqn (2.4)) to vary with time. Let Gij represent the power gain from transmitter of the jth link to receiver of the ith link. The total interference and noise at
33
any node is given by (4.1)[29]
qi =
N
X
Gij p̂j + ni
(4.1)
j=1,j6=i
where p̂j is the transmit signal power from jth transmitter and ni is the noise at the
receiver from other links.
The SIR of this sensor network would be the fraction of signal transmitted by the
transmitter and total interference(including noise) at the receiver. Let γi denote the
SIR of node i and is given by (4.2). In [33], the author explains that the transmission
quality is a decreasing function of its SIR at its receiver node.
γi =
Gii pi
qi
(4.2)
For every node i there is a threshold SIR, Ri > 0 such that for the link to operate
properly, it must satisfy the condition γi ≥ Ri . The noise power for node i is denoted
Ri ni
[29]. A vector of transmit powers P̂ (n) is defined such that
by ui and is given by
G11
P̂ (n) = [p̂1 (n) · · · p̂K (n)]T . Then, the SIR requirements can be written in matrix form
as shown in (4.3)
(I − F )P ≥ u
(4.3)
where I is the identity matrix, P̂ is the column vector of transmitted powers, u is the
column vector of noise powers and F is a matrix of cross-link power gains given by
Fij =
0,
if i = j.
(4.4)
Ri Gij , otherwise.
Gii
34
4.2.2
DISTRIBUTED POWER CONTROL
In any wireless sensor network it is necessary that every transmitter standardizes its
own power and is known as Distributed Power Control. A centralized power control
regulation is difficult and is prone to many problems. As the wireless technologies
keep emerging, it is important to enhance the efficiency of DPC algorithms.
The DPC algorithm was proposed by Foschini and Miljanic[34], which describes an
approach of constant SIR. The main concept of this algorithm is that each link attempts to maintain its SIR close to the threshold value of SIR, thereby reducing the
interference from other links.
The matrix F in (4.4) is element-wise nonnegative. (I − F )−1 exists and the optimal
power vector solution Pˆ∗ is given by (4.5). This optimal solution reduces the transmit
power of each node.
Pˆ∗ = (I − F )−1 u
(4.5)
The DPC equation can equivalently be written as
pi (n + 1) =
Ri
pi (n)
γi (n)
(4.6)
where n = 1, 2, . . . are the iterations, pi is the transmitted power by node i and γi (n)
is the SIR at node i in the nth iteration.
Each node monitors its individual SIR and the node i increases its transmit power
when its γi (n) is less that its threshold SIR i.e. Ri and decreases it otherwise[35]. All
the nodes do the same, and the optimal power Pˆ∗ is achieved as n → ∞.
Equation (4.6) can equivalently be written in differnce form as:
P̂ (n + 1) = Z(n)P̂ (n) + U (n)
35
(4.7)
nK T
n1
where U (n) is defined such that U (n) = [ RG111
· · · RGKKK
] .
When 4 nodes are considered, the difference equation (4.7) can be represented as,
p̂1 (n + 1)
p̂2 (n + 1)
p̂ (n + 1)
3
p̂4 (n + 1)
0
R G
2 21
G22
=
R3 G31
G33
R4 G41
G44
R1 G12
G11
R1 G13
G11
0
R2 G23
G22
R3 G32
G33
0
R4 G42
G44
R4 G43
G44
R1 G14
G11
p̂1 (n)
R2 G24
p̂
(n)
2
G22
R3 G34
p̂ (n)
G33 3
0
p̂4 (n)
+U (n)
(4.8)
The wireless network of sensor nodes can be studied by analyzing both time synchronization and power control as coupled parameters. From (3.18), (2.13), (4.7) and
(4.8) the difference equation can be represented as,
0 τ (n) 0
τ (n + 1) A(n, P̂ )
=
+
P̂ (n + 1)
0
Z(n)
P̂ (n)
U (n)
(4.9)
where it is to be noted that the coupling between τ and P̂ arises because the A matrix
(see 2.13) is now a function of P̂ .
4.2.3
NUMERICAL RESULTS
Figure (4.3) provides an overplot of the synchronization achieved, when power transmit control occurs simultaneously. As can be seen, in this particular case, use of
simultaneous power transmit control speeds up synchronization. Plots of the LTV
poles and their associated time-varying modes are shown in Figures (4.4) and (4.5),
respectively. As can be seen, the magnitude of φ43 with simultaneous power transmit
control is much higher than without power control. The φ44 mode shows the opposite trend, i.e this mode shows a lower magnitude with simultaneous power transmit
36
control, when compared to without using power transmit control. Thus by use of the
LTV poles, one can identify the specific mode(s) that get speeded up/slowed down
when performing simultaneous power transmit control and synchronization.
Figure 4.3: A comparison of the phases τ of the nodes with and without simultaneous
power transmit control
37
Figure 4.4: A comparison of the LTV right-poles of synchronization with and without
simultaneous power transmit control
Figure 4.5: A comparison of time-varying modes of synchronization with and without
simultaneous power transmit control
Figure (4.6) provides an overplot of the synchronization achieved corresponding to
an oscillatory response, when power transmit control occurs simultaneously
38
Figure 4.6: A comparison of the phases τ of the nodes with and without simultaneous
power transmit control corresponding to an oscillatory response
Plots of the LTV poles and their associated time-varying modes corresponding to
an oscillatory response are shown in Figures (4.7) and (4.8), respectively.
39
Figure 4.7: A comparison of the LTV right-poles of synchronization with and without
simultaneous power transmit control corresponding to an oscillatory response
Figure 4.8: A comparison of time-varying modes of synchronization with and without
simultaneous power transmit control corresponding to an oscillatory response
In some cases, the power transmit control algorithm can slow down synchronization.
This is illustrated in Fig.(4.9).
40
Figure 4.9: τ with and without power transmit control (Synchronization is faster
without power transmit control)
41
Chapter 5
CONCLUSIONS
In this thesis the problem of synchronization of mobile sensor nodes is modeled as
Linear Time Varying (LTV) systems interacting over a graph, and explores the use of
LTV poles as constructs for analyzing the speed at which synchronization occurs. For
LTI systems interacting over a graph, the use of conventional poles (obtained from
the system’s transfer function) have been well established to deduce the convergence
properties of the graph. It is anticipated that for LTV systems interacting over
a graph, the use of LTV poles (as obtained by the special factorization technique
introduced in [4] and applied in a graph framework in this paper), would hold similar
promise. Future work would conduct a deeper analysis of the LTV poles in a graphtheoretic framework.
42
REFERENCES
43
REFERENCES
[1] Chiara Buratti, Andrea Conti, Davide Dardari, and Roberto Verdone.
overview on wireless sensor networks technology and evolution.
An
Sensors,
9(9):6869–6896, 2009.
[2] Chee-Yee Chong and S.P. Kumar. Sensor networks: evolution, opportunities,
and challenges. Proceedings of the IEEE, 91(8):1247–1256, Aug 2003.
[3] Dionisis Kandris, Panagiotis Tsioumas, Anthony Tzes, George Nikolakopoulos,
and Dimitrios D Vergados. Power conservation through energy efficient routing
in wireless sensor networks. Sensors, 9(9):7320–7342, 2009.
[4] Edward W. Kamen. The poles and zeros of a linear time-varying system. Linear
Algebra and its Applications, 98(0):263 – 289, 1988.
[5] Min-Yen Wu. A new concept of eigenvalues and eigenvectors and its applications.
Automatic Control, IEEE Transactions on, 25(4):824–826, Aug 1980.
[6] J. Zhu and C.D. Johnson. Unified canonical forms for matrices over a differential
ring. Linear Algebra and its Applications, 147(0):201 – 248, 1991.
[7] R.T. O’Brien and P.A. Iglesias. On the poles and zeros of linear, time-varying
systems. Circuits and Systems I: Fundamental Theory and Applications, IEEE
Transactions on, 48(5):565–577, May 2001.
[8] F. Sivrikaya and B. Yener. Time synchronization in sensor networks: a survey.
Network, IEEE, 18(4):45–50, July 2004.
44
[9] Gang Xiong and S. Kishore. Second order distributed consensus time synchronization algorithm for wireless sensor networks. In Global Telecommunications
Conference, 2008. IEEE GLOBECOM 2008. IEEE, pages 1–5, Nov 2008.
[10] O. Simeone, U. Spagnolini, Y. Bar-Ness, and Steven H. Strogatz. Distributed
synchronization in wireless networks.
Signal Processing Magazine, IEEE,
25(5):81–97, September 2008.
[11] Yao-Win Hong and A. Scaglione. A scalable synchronization protocol for large
scale sensor networks and its applications. Selected Areas in Communications,
IEEE Journal on, 23(5):1085–1099, May 2005.
[12] W.C. Lindsey, F. Ghazvinian, W.C. Hagmann, and K. Dessouky. Network synchronization. Proceedings of the IEEE, 73(10):1445–1467, Oct 1985.
[13] R. Mirollo and S. Strogatz. Synchronization of pulse-coupled biological oscillators. SIAM Journal on Applied Mathematics, 50(6):1645–1662, 1990.
[14] An-swol Hu and Sergio D Servetto. Asymptotically optimal time synchronization
in dense sensor networks. In Proceedings of the 2nd ACM international conference
on Wireless sensor networks and applications, pages 1–10. ACM, 2003.
[15] An-Swol Hu and Sergio D Servetto. On the scalability of cooperative time synchronization in pulse-connected networks. Information Theory, IEEE Transactions on, 52(6):2725–2748, 2006.
[16] Yao-Win Hong and Anna Scaglione. A scalable synchronization protocol for large
scale sensor networks and its applications. Selected Areas in Communications,
IEEE Journal on, 23(5):1085–1099, 2005.
[17] B. Segee. Methods in neuronal modeling: from ions to networks, 2nd edition.
Computing in Science Engineering, 1(1):81–81, Jan 1999.
45
[18] Nathan Shepard. Integrate and fire model. 2007.
[19] Rose T. Faghih, K. Savla, M.A Dahleh, and E.N. Brown. The fitzhugh-nagumo
model: Firing modes with time-varying parameters amp; parameter estimation.
In Engineering in Medicine and Biology Society (EMBC), 2010 Annual International Conference of the IEEE, pages 4116–4119, Aug 2010.
[20] Saurabh Ganeriwal, Christina Pöpper, Srdjan Čapkun, and Mani B Srivastava.
Secure time synchronization in sensor networks. ACM Transactions on Information and System Security (TISSEC), 11(4):23, 2008.
[21] E. Sourour and M. Nakagawa. Mutual decentralized synchronization for intervehicle communications. Vehicular Technology, IEEE Transactions on, 48(6):2015–
2027, Nov 1999.
[22] R. Olfati-Saber and R.M. Murray. Consensus problems in networks of agents with
switching topology and time-delays. Automatic Control, IEEE Transactions on,
49(9):1520–1533, Sept 2004.
[23] F. Tong and Y. Akaiwa. Theoretical analysis of inter-basestation-synchronization
system. In Universal Personal Communications. 1995. Record., 1995 Fourth
IEEE International Conference on, pages 878–882, Nov 1995.
[24] L. Moreau. Stability of multiagent systems with time-dependent communication
links. Automatic Control, IEEE Transactions on, 50(2):169–182, Feb 2005.
[25] G. Scutari, S. Barbarossa, and L. Pescosolido. Optimal decentralized estimation
through self-synchronizing networks in the presence of propagation delays. In
Signal Processing Advances in Wireless Communications, 2006. SPAWC ’06.
IEEE 7th Workshop on, pages 1–5, July 2006.
46
[26] Vishwamithra Sunkara, Wilfred Nobleheart, and Animesh Chakravarthy. Performance metrics for tiltrotor flight dynamics during the transition regime. Journal
of Guidance, Control, and Dynamics, 37(6):2039–2044, 2014.
[27] J Zhu and CD Johnson. Unified canonical forms for matrices over a differential
ring. Linear Algebra and Its Applications, 147:201–248, 1991.
[28] J. Zhu and C.D. Johnson. A new procedure for transforming of time-varying
linear systems to a companion canonical form via d-similarity transformations.
In Southeastcon ’89. Proceedings. Energy and Information Technologies in the
Southeast., IEEE, pages 1284–1288 vol.3, Apr 1989.
[29] Mung Chiang, Prashanth Hande, Tian Lan, and Chee Wei Tan. Power control
in wireless cellular networks. Found. Trends Netw., 2(4):381–533, April 2008.
[30] Ram Ramanathan and R. Rosales-Hain. Topology control of multihop wireless
networks using transmit power adjustment. In INFOCOM 2000. Nineteenth
Annual Joint Conference of the IEEE Computer and Communications Societies.
Proceedings. IEEE, volume 2, pages 404–413 vol.2, 2000.
[31] Vaggelis G. Douros and George C. Polyzos. Review of some fundamental approaches for power control in wireless networks. Computer Communications,
34(13):1580 – 1592, 2011.
[32] P.R. Kumar. New technological vistas for systems and control: the example of
wireless networks. Control Systems, IEEE, 21(1):24–37, Feb 2001.
[33] N. Bambos, S.C. Chen, and G.J. Pottie. Channel access algorithms with active
link protection for wireless communication networks with power control. Networking, IEEE/ACM Transactions on, 8(5):583–597, Oct 2000.
47
[34] G.J. Foschini and Z. Miljanic. A simple distributed autonomous power control
algorithm and its convergence. Vehicular Technology, IEEE Transactions on,
42(4):641–646, Nov 1993.
[35] R.D. Yates. A framework for uplink power control in cellular radio systems.
Selected Areas in Communications, IEEE Journal on, 13(7):1341–1347, Sep 1995.
48
APPENDIX
49
APPENDIX
The values of a0 (n), a1 (n), a2 (n), a3 (n) in the controllable canonical form of the system
matrix (Section 3.2) are as shown below.
a0 (n) = −((((α32 (n+1))(((1−α12 (n+1)−α13 (n+1)))−((α13 (n+1))((α13 (n+2))
(((1 − α31 (n + 1) − α32 (n + 1))) − (((1 − α12 (n + 1) − α13 (n + 1)))(α32 (n + 1)))
/(α12 (n + 1))) + (α12 (n + 2))(((1 − α21 (n + 1) − α23 (n + 1))) − ((1 − )
((1 − α12 (n + 1) − α13 (n + 1))))/(α12 (n + 1))) + ((1 − α12 (n + 2) − α13 (n + 2)))
((1 − ) − (((1 − α12 (n + 1) − α13 (n + 1)))(α42 (n + 1)))/(α12 (n + 1)))))
/(((1 − α12 (n + 2) − α13 (n + 2)))(((1 − α41 (n + 1) − α42 (n + 1))) − ((α13 (n + 1))
(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )
(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))
(α32 (n + 1)))/(α12 (n + 1))))))/(α12 (n + 1)) − ((1 − α31 (n + 1)
− α32 (n + 1))) + ((1 − )((α13 (n + 2))(((1 − α31 (n + 1) − α32 (n + 1)))
− (((1 − α12 (n + 1) − α13 (n + 1)))(α32 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))
(((1 − α21 (n + 1) − α23 (n + 1))) − ((1 − )((1 − α12 (n + 1) − α13 (n + 1))))
/(α12 (n + 1))) + ((1 − α12 (n + 2) − α13 (n + 2)))((1 − ) − (((1 − α12 (n + 1)
− α13 (n + 1)))(α42 (n + 1)))/(α12 (n + 1)))))/(((1 − α12 (n + 2) − α13 (n + 2)))
(((1 − α41 (n + 1) − α42 (n + 1))) − ((α13 (n + 1))(α42 (n + 1)))/(α12 (n + 1)))
50
+ (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1)))
+ (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1)))))
(((1 − α12 (n + 3) − α13 (n + 3)))(((1 − α41 (n + 2) − α42 (n + 2))) − ((α13 (n + 2))
(α42 (n + 2)))/(α12 (n + 2))) + (α12 (n + 3))((α23 (n + 2)) − ((1 − )
(α13 (n + 2)))/(α12 (n + 2))) + (α13 (n + 3))((1 − ) − ((α13 (n + 2))
(α32 (n + 2)))/(α12 (n + 2)))) + (((α42 (n + 1))(((1 − α12 (n + 1) − α13 (n + 1)))
− ((α13 (n + 1))((α13 (n + 2))(((1 − α31 (n + 1) − α32 (n + 1))) − (((1 − α12 (n + 1)
− α13 (n + 1)))(α32 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))(((1 − α21 (n + 1)
− α23 (n + 1))) − ((1 − )((1 − α12 (n + 1) − α13 (n + 1))))/(α12 (n + 1)))
+ ((1 − α12 (n + 2) − α13 (n + 2)))((1 − ) − (((1 − α12 (n + 1) − α13 (n + 1)))
(α42 (n + 1)))/(α12 (n + 1)))))/(((1 − α12 (n + 2) − α13 (n + 2)))(((1 − α41 (n + 1)
− α42 (n + 1))) − ((α13 (n + 1))(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))
((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))
((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1))))))/(α12 (n + 1))
−(1−)+(((1−α41 (n+1)−α42 (n+1)))((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))
− (((1 − α12 (n + 1) − α13 (n + 1)))(α32 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))
(((1−α21 (n+1)−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))
+ ((1 − α12 (n + 2) − α13 (n + 2)))((1 − ) − (((1 − α12 (n + 1) − α13 (n + 1)))
(α42 (n + 1)))/(α12 (n + 1)))))/(((1 − α12 (n + 2) − α13 (n + 2)))(((1 − α41 (n + 1)
−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))/(α12 (n+1)))+(α12 (n+2))((α23 (n+1))
− ((1 − )(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))
(α32 (n + 1)))/(α12 (n + 1)))))((α13 (n + 3))(((1 − α31 (n + 2) − α32 (n + 2)))
−(((1−α12 (n+2)−α13 (n+2)))(α32 (n+2)))/(α12 (n+2)))+(α12 (n+3))(((1−α21 (n+2)
−α23 (n+2)))−((1−)((1−α12 (n+2)−α13 (n+2))))/(α12 (n+2)))+((1−α12 (n+3)
51
− α13 (n + 3)))((1 − ) − (((1 − α12 (n + 2) − α13 (n + 2)))(α42 (n + 2)))/(α12 (n + 2)))))
((α41 (n)) − ((1 − )(((((1 − α41 (n) − α42 (n)))((α12 (n + 1))((α21 (n))
− ((1 − )(1 − ))/(α12 (n))) + (α13 (n + 1))((α31 (n)) − ((1 − )(α32 (n)))
/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((α41 (n))−((1−)(α42 (n)))/(α12 (n)))))
/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − )
−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))
− ((α13 (n))(α42 (n)))/(α12 (n)))) − (α41 (n)) + ((α42 (n))((1 − ) − ((α13 (n))
((α12 (n + 1))((α21 (n)) − ((1 − )(1 − ))/(α12 (n))) + (α13 (n + 1))((α31 (n))
− ((1 − )(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))((α41 (n)) − ((1 − )
(α42 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n)))
+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))
(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n))))))/(α12 (n)))((α13 (n + 2))
(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))
+(α12 (n+2))(((1−α21 (n+1)−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))
/(α12 (n+1)))+((1−α12 (n+2)−α13 (n+2)))((1−)−(((1−α12 (n+1)−α13 (n+1)))
(α42 (n + 1)))/(α12 (n + 1)))) + (((1 − α12 (n + 2) − α13 (n + 2)))(((1 − α41 (n + 1)
− α42 (n + 1))) − ((α13 (n + 1))(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))
((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))((1 − )
− ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1))))(((1 − )((α12 (n + 1))
((α21 (n)) − ((1 − )(1 − ))/(α12 (n))) + (α13 (n + 1))((α31 (n)) − ((1 − )
(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))((α41 (n)) − ((1 − )
(α42 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))
/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n)))
+ ((1 − α12 (n + 1) − α13 (n + 1)))(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))
52
/(α12 (n)))) − (α31 (n)) + ((α32 (n))((1 − ) − ((α13 (n))((α12 (n + 1))
((α21 (n)) − ((1 − )(1 − ))/(α12 (n))) + (α13 (n + 1))((α31 (n))
− ((1 − )(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))((α41 (n))
− ((1 − )(α42 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )
(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))
/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))(((1 − α41 (n) − α42 (n))) − ((α13 (n))
(α42 (n)))/(α12 (n))))))/(α12 (n)))))/((((1 − α12 (n + 2) − α13 (n + 2)))
(((1 − α41 (n + 1) − α42 (n + 1))) − ((α13 (n + 1))(α42 (n + 1)))/(α12 (n + 1)))
+ (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1)))
+ (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1))))
(((α32 (n))(((1 − α12 (n) − α13 (n))) − ((α13 (n))((α12 (n + 1))
(((1 − α21 (n) − α23 (n))) − ((1 − )((1 − α12 (n) − α13 (n))))/(α12 (n)))
+ ((1 − α12 (n + 1) − α13 (n + 1)))((1 − ) − (((1 − α12 (n) − α13 (n)))(α42 (n)))
/(α12 (n))) + (α13 (n + 1))(((1 − α31 (n) − α32 (n))) − (((1 − α12 (n) − α13 (n)))
(α32 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))
/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n)))
+ ((1 − α12 (n + 1) − α13 (n + 1)))(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))
/(α12 (n))))))/(α12 (n)) − ((1 − α31 (n) − α32 (n))) + ((1 − )((α12 (n + 1))
(((1 − α21 (n) − α23 (n))) − ((1 − )((1 − α12 (n) − α13 (n))))/(α12 (n)))
+ ((1 − α12 (n + 1) − α13 (n + 1)))((1 − ) − (((1 − α12 (n) − α13 (n)))(α42 (n)))
/(α12 (n))) + (α13 (n + 1))(((1 − α31 (n) − α32 (n))) − (((1 − α12 (n) − α13 (n)))
(α32 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))
/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n)))
+ ((1 − α12 (n + 1) − α13 (n + 1)))(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))
53
/(α12 (n))))) + ((α13 (n + 2))(((1 − α31 (n + 1) − α32 (n + 1))) − (((1 − α12 (n + 1)
− α13 (n + 1)))(α32 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))(((1 − α21 (n + 1) − α23
(n + 1))) − ((1 − )((1 − α12 (n + 1) − α13 (n + 1))))/(α12 (n + 1))) + ((1 − α12 (n + 2)
− α13 (n + 2)))((1 − ) − (((1 − α12 (n + 1) − α13 (n + 1)))(α42 (n + 1)))/(α12 (n + 1))))
(((α42 (n))(((1 − α12 (n) − α13 (n))) − ((α13 (n))((α12 (n + 1))(((1 − α21 (n)
−α23 (n)))−((1−)((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))
((1 − ) − (((1 − α12 (n) − α13 (n)))(α42 (n)))/(α12 (n))) + (α13 (n + 1))
(((1 − α31 (n) − α32 (n))) − (((1 − α12 (n) − α13 (n)))(α32 (n)))/(α12 (n)))))
/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))
((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))
(((1 − α41 (n) − α42 (n))) − ((α13 (n))α42 (n)))/(α12 (n))))))/(α12 (n))
− (1 − ) + (((1 − α41 (n) − α42 (n)))((α12 (n + 1))(((1 − α21 (n) − α23 (n)))
− ((1 − )((1 − α12 (n) − α13 (n))))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))
((1 − ) − (((1 − α12 (n) − α13 (n)))(α42 (n)))/(α12 (n))) + (α13 (n + 1))
(((1 − α31 (n) − α32 (n))) − (((1 − α12 (n) − α13 (n)))(α32 (n)))/(α12 (n)))))
/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))
((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))
(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n))))))
− (((1 − alpha41 (n) − α42 (n)))((α12 (n + 1))((α21 (n)) − ((1 − )(1 − ))
/(α12 (n))) + (α13 (n + 1))((α31 (n)) − ((1 − )(α32 (n)))/(α12 (n)))
+ ((1 − α12 (n + 1) − α13 (n + 1)))((α41 (n)) − ((1 − )(α42 (n)))/(α12 (n)))
− ((((((1 − α41 (n) − α42 (n)))((α12 (n + 1))((α21 (n)) − ((1 − )(1 − ))/(α12 (n)))
+ (α13 (n + 1))((α31 (n)) − ((1 − )(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1)
− α13 (n + 1)))((α41 (n)) − ((1 − )(α42 (n)))/(α12 (n)))))/((α12 (n + 1))
54
((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − )
− ((α13 (n))(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))
(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n))))
− (α41 (n)) + ((α42 (n))((1 − ) − ((α13 (n))((α12 (n + 1))
((α21 (n)) − ((1 − )(1 − ))/(α12 (n))) + (α13 (n + 1))((α31 (n))
− ((1 − )(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))
((α41 (n)) − ((1 − )(α42 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n))
− ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))
/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))
/(α12 (n))))))/(α12 (n)))((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)
−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)−α23 (n+1)))
−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))+((1−α12 (n+2)−α13 (n+2)))((1−)
−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))/(α12 (n+1))))+(((1−α12 (n+2)−α13 (n+2)))
(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))/(α12 (n+1)))+(α12 (n+2))
((α23 (n+1))−((1−)(α13 (n+1)))/(α12 (n+1)))+(α13 (n+2))((1−)−((α13 (n+1))
(α32 (n+1)))/(α12 (n+1))))(((1−)((α12 (n+1))((α21 (n))−((1−)(1−))/(α12 (n)))
+(α13 (n+1))((α31 (n))−((1−)(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((α41 (n))
−((1−)(α42 (n)))/(α12 (n)))))/((α12 (n+1))((α23 (n))−((1−)(α13 (n)))/(α12 (n)))
+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))
(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n))))−(α31 (n))+((α32 (n))((1−)
−((α13 (n))((α12 (n+1))((α21 (n))−((1−)(1−))/(α12 (n)))+(α13 (n+1))((α31 (n))
−((1−)(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((α41 (n))−((1−)(α42 (n)))
/(α12 (n)))))/((α12 (n+1))((α23 (n))−((1−)(α13 (n)))/(α12 (n)))+(α13 (n+1))((1−)
−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))
55
−((α13 (n))(α42 (n)))/(α12 (n))))))/(α12 (n))))((α12 (n+1))(((1−α21 (n)−α23 (n)))
− ((1 − )((1 − α12 (n) − α13 (n))))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))((1 − )
−(((1−α12 (n)−α13 (n)))(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))
− (((1 − α12 (n) − α13 (n)))(α32 (n)))/(α12 (n)))))/((((1 − α12 (n + 2) − α13 (n + 2)))
(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))/(α12 (n+1)))+(α12 (n+2))
((α23 (n+1))−((1−)(α13 (n+1)))/(α12 (n+1)))+(α13 (n+2))((1−)−((α13 (n+1))
(α32 (n+1)))/(α12 (n+1))))(((α32 (n))(((1−α12 (n)−α13 (n)))−((α13 (n))((α12 (n+1))
(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)
−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)
− α32 (n))) − (((1 − α12 (n) − α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n))
−((1−)(α13 (n)))/(α12 (n)))+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))
+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n))))))
/(α12 (n))−((1−α31 (n)−α32 (n)))+((1−)((α12 (n+1))(((1−α21 (n)−α23 (n)))−((1−)
((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)
−α13 (n)))(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)
−α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n+1))((α23 (n))−((1−)(α13 (n)))/(α12 (n)))
+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))
(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n)))))/(α12 (n))))))/(α12 (n)));
a1 (n) = −(((α42 (n+1))((1−)−((α13 (n+1))((α13 (n+2))((α31 (n+1))−((1−)
(α32 (n + 1)))/(α12 (n + 1))) + ((1 − α12 (n + 2) − α13 (n + 2)))((α41 (n + 1)) − ((1 − )
(α42 (n+1)))/(α12 (n+1)))+(α12 (n+2))((α21 (n+1))−((1−)(1−))/(α12 (n+1)))))
/(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))
56
/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1)))
+ (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1))))))/(α12 (n + 1))
− (α41 (n + 1)) + (((1 − α41 (n + 1) − α42 (n + 1)))((α13 (n + 2))((α31 (n + 1)) − ((1 − )
(α32 (n + 1)))/(α12 (n + 1))) + ((1 − α12 (n + 2) − α13 (n + 2)))((α41 (n + 1)) − ((1 − )
(α42 (n+1)))/(α12 (n+1)))+(α12 (n+2))((α21 (n+1))−((1−)(1−))/(α12 (n+1)))))
/(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))
/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1)))
+ (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1)))))((α13 (n + 3))
(((1−α31 (n+2)−α32 (n+2)))−(((1−α12 (n+2)−α13 (n+2)))(α32 (n+2)))/(α12 (n+2)))
+ (α12 (n + 3))(((1 − α21 (n + 2) − α23 (n + 2))) − ((1 − )((1 − α12 (n + 2)
−α13 (n+2))))α12 (n+2)))+((1−α12 (n+3)−α13 (n+3)))((1−)−(((1−α12 (n+2)
− α13 (n + 2)))(α42 (n + 2)))/(α12 (n + 2)))) − ((((α32 (n + 1))(((1 − α12 (n + 1)
−α13 (n+1)))−((α13 (n+1))((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)
−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)−α23 (n+1)))
−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))+((1−α12 (n+2)−α13 (n+2)))
((1−)−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))/(α12 (n+1)))))/(((1−α12 (n+2)
−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))/(α12 (n+1)))
+ (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))
((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1))))))/(α12 (n + 1))
−((1−α31 (n+1)−α32 (n+1)))+((1−)((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))
− (((1 − α12 (n + 1) − α13 (n + 1)))(α32 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))
(((1−α21 (n+1)−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))
+((1−α12 (n+2)−α13 (n+2)))((1−)−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))
/(α12 (n+1)))))/(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))
57
(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))
/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1)))))
(((1−α12 (n+3)−α13 (n+3)))(((1−α41 (n+2)−α42 (n+2)))−((α13 (n+2))(α42 (n+2)))
/(α12 (n + 2))) + (α12 (n + 3))((α23 (n + 2)) − ((1 − )(α13 (n + 2)))/(α12 (n + 2)))
+ (α13 (n + 3))((1 − ) − ((α13 (n + 2))(α32 (n + 2)))/(α12 (n + 2)))) + (((α42 (n + 1))
(((1−α12 (n+1)−α13 (n+1)))−((α13 (n+1))((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))
−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)
− α23 (n + 1))) − ((1 − )((1 − α12 (n + 1) − α13 (n + 1))))/(α12 (n + 1))) + ((1−
α12 (n+2)−α13 (n+2)))((1−)−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))/(α12 (n+1)))))
/(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))
/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1)))
+ (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1))))))/(α12 (n + 1))
−(1−)+(((1−α41 (n+1)−α42 (n+1)))((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))
−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)
− α23 (n + 1))) − ((1 − )((1 − α12 (n + 1) − α13 (n + 1))))/(α12 (n + 1))) + ((1
− α12 (n + 2) − α13 (n + 2)))((1 − ) − (((1 − α12 (n + 1) − α13 (n + 1)))
(α42 (n+1)))/(α12 (n+1)))))/(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))
− ((α13 (n + 1))(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )
(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))
/(α12 (n+1)))))((α13 (n+3))(((1−α31 (n+2)−α32 (n+2)))−(((1−α12 (n+2)−α13 (n+2)))
(α32 (n + 2)))/(α12 (n + 2))) + (α12 (n + 3))(((1 − α21 (n + 2) − α23 (n + 2))) − ((1 − )
((1 − α12 (n + 2) − α13 (n + 2))))/(α12 (n + 2))) + ((1 − α12 (n + 3) − α13 (n + 3)))((1 − )
− (((1 − α12 (n + 2) − α13 (n + 2)))(α42 (n + 2)))/(α12 (n + 2)))))(((α42 (n))(((α13 (n))
((1 − ) + ((1 − )(α12 (n + 1)))/(α12 (n)) + (((α12 (n + 1))(((1 − α21 (n) − α23 (n)))
58
− ((1 − )((1 − α12 (n) − α13 (n))))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))((1 − )
−(((1−α12 (n)−α13 (n)))(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))
− (((1 − α12 (n) − α13 (n)))(α32 (n)))/(α12 (n))))((((α42 (n))(((α13 (n))((1 − )
+((1−)(α12 (n+1)))/(α12 (n))+((α13 (n+1))(α32 (n)))/(α12 (n))+(((1−α12 (n+1)
− α13 (n + 1)))(α42 (n)))/(α12 (n))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))
/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n)))
+ ((1 − α12 (n + 1) − α13 (n + 1)))(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))
/(α12 (n))))+1))/(α12 (n))−(((1−α41 (n)−α42 (n)))((1−)+((1−)(α12 (n+1)))
/(α12 (n)) + ((α13 (n + 1))(α32 (n)))/(α12 (n)) + (((1 − α12 (n + 1) − α13 (n + 1)))
(α42 (n)))/(α12 (n))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n)))
+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))
(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n)))))((α13 (n+2))(((1−α31 (n+1)
−α32 (n+1)))−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))
(((1−α21 (n+1)−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))
+((1−α12 (n+2)−α13 (n+2)))((1−)−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))
/(α12 (n + 1)))) + (α13 (n + 2))((α31 (n + 1)) − ((1 − )(α32 (n + 1)))/(α12 (n + 1)))
+((1−α12 (n+2)−α13 (n+2)))((α41 (n+1))−((1−)(α42 (n+1)))/(α12 (n+1)))−(((1−)
((1 − ) + ((1 − )(α12 (n + 1)))/(α12 (n)) + ((α13 (n + 1))(α32 (n)))/(α12 (n))
+ (((1 − α12 (n + 1) − α13 (n + 1)))(α42 (n)))/(α12 (n))))/((α12 (n + 1))((α23 (n))
− ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))
/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))
/(α12 (n)))) − ((α32 (n))(((α13 (n))((1 − ) + ((1 − )(α12 (n + 1)))/(α12 (n))
+ ((α13 (n + 1))(α32 (n)))/(α12 (n)) + (((1 − α12 (n + 1) − α13 (n + 1)))(α42 (n)))
/(α12 (n))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))
59
((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)
− α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n)))) + 1))/(α12 (n)))(((1 − α12 (n + 2)
−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))/(α12 (n+1)))
+ (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))
((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1)))) + (α12 (n + 2))((α21 (n + 1))
−((1−)(1−))/(α12 (n+1)))))/((((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))
− ((α13 (n + 1))(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )
(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))
/(α12 (n + 1))))(((α32 (n))(((1 − α12 (n) − α13 (n))) − ((α13 (n))((α12 (n + 1))
(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)
− α13 (n + 1)))((1 − ) − (((1 − α12 (n) − α13 (n)))(α42 (n)))/(α12 (n))) + (α13 (n + 1))
(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n+1))
((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))
(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))
(α42 (n)))/(α12 (n))))))/(α12 (n)) − ((1 − α31 (n) − α32 (n))) + ((1 − )((α12 (n + 1))
(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)
− α13 (n + 1)))((1 − ) − (((1 − α12 (n) − α13 (n)))(α42 (n)))/(α12 (n))) + (α13 (n + 1))
(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n+1))
((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))
(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))
(α42 (n)))/(α12 (n)))))+((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)
−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)−α23 (n+1)))−((1−)
((1 − α12 (n + 1) − α13 (n + 1))))/(α12 (n + 1))) + ((1 − α12 (n + 2) − α13 (n + 2)))((1 − )
−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))/(α12 (n+1))))(((α42 (n))(((1−α12 (n)
60
− α13 (n))) − ((α13 (n))((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )((1 − α12 (n)
−α13 (n))))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))
/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))
/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n)))
+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))
(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n))))))/(α12 (n)) − (1 − )
+(((1−α41 (n)−α42 (n)))((α12 (n+1))(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)
− α13 (n))))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))((1 − ) − (((1 − α12 (n)
−α13 (n)))(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)
− α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))
/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n)))
+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n))))))
+ ((α13 (n + 1))(α32 (n)))/(α12 (n)) + (((1 − α12 (n + 1) − α13 (n + 1)))(α42 (n)))
/(α12 (n))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))
((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41(n)
− α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n)))) − (((1 − α12 (n) − α13 (n)))((((α42 (n))
(((α13 (n))((1 − ) + ((1 − )(α12 (n + 1)))/(α12 (n)) + ((α13 (n + 1))(α32 (n)))
/(α12 (n))+(((1−α12 (n+1)−α13 (n+1)))(α42 (n)))/(α12 (n))))/((α12 (n+1))((α23 (n))
−((1−)(α13 (n)))/(α12 (n)))+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))
+ ((1 − α12 (n + 1) − α13 (n + 1)))(((1 − α41(n) − α42 (n))) − ((α13 (n))(α42 (n)))
/(α12 (n))))+1))/(α12 (n))−(((1−α41(n)−α42 (n)))((1−)+((1−)(α12 (n+1)))
/(α12 (n)) + ((α13 (n + 1))(α32 (n)))/(α12 (n)) + (((1 − α12 (n + 1) − α13 (n + 1)))
(α42 (n)))/(α12 (n))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n)))
+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))
61
(((1 − α41(n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n)))))((α13 (n + 2))
(((1 − α31 (n + 1) − α32 (n + 1))) − (((1 − α12 (n + 1) − α13 (n + 1)))(α32 (n + 1)))
/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)−α23 (n+1)))−((1−)((1−α12 (n+1)
−α13 (n+1))))/(α12 (n+1)))+((1−α12 (n+2)−α13 (n+2)))((1−)−(((1−α12 (n+1)
− α13 (n + 1)))(α42 (n + 1)))/(α12 (n + 1)))) + (α13 (n + 2))((α31 (n + 1)) − ((1 − )
(α32 (n + 1)))/(α12 (n + 1))) + ((1 − α12 (n + 2) − α13 (n + 2)))((α41 (n + 1)) − ((1 − )
(α42 (n + 1)))/(α12 (n + 1))) − (((1 − )((1 − ) + ((1 − )(α12 (n + 1)))/(α12 (n))
+ ((α13 (n + 1))(α32 (n)))/(α12 (n)) + (((1 − α12 (n + 1) − α13 (n + 1)))(α42 (n)))
/(α12 (n))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))
((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))
(((1 − α41n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n)))) − ((α32 (n))(((α13 (n))
((1 − ) + ((1 − )(α12 (n + 1)))/(α12 (n)) + ((α13 (n + 1))(α32 (n)))/(α12 (n))
+ (((1 − α12 (n + 1) − α13 (n + 1)))(α42 (n)))/(α12 (n))))/((α12 (n + 1))((α23 (n))
− ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))
/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41n)−α42 (n)))−((α13 (n))(α42 (n)))
/(α12 (n))))+1))/(α12 (n)))(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))
− ((α13 (n + 1))(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )
(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))
/(α12 (n + 1)))) + (α12 (n + 2))((α21 (n + 1)) − ((1 − )(1 − ))/(α12 (n + 1)))))
/((((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))
/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1)))
+ (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1))))(((α32 (n))
(((1 − α12 (n) − α13 (n))) − ((α13 (n))((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )
((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)
62
−α13 (n)))(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)
−α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n+1))((α23 (n))−((1−)(α13 (n)))/(α12 (n)))
+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))
(((1 − α41n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n))))))/(α12 (n))
− ((1 − α31 (n) − α32 (n))) + ((1 − )((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )
((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)
− α13 (n)))(α42 (n)))/(α12 (n))) + (α13 (n + 1))(((1 − α31 (n) − α32 (n)))
− (((1 − α12 (n) − α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n))
− ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))
/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41(n)−α42 (n)))−((α13 (n))(α42 (n)))
/(α12 (n)))))+((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)−α13 (n+1)))
(α32 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))(((1 − α21 (n + 1) − α23 (n + 1))) − ((1 − )
((1 − α12 (n + 1) − α13 (n + 1))))/(α12 (n + 1))) + ((1 − α12 (n + 2) − α13 (n + 2)))((1 − )
−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))/(α12 (n+1))))(((α42 (n))(((1−α12 (n)
− α13 (n))) − ((α13 (n))((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )((1 − α12 (n)
− α13 (n))))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))((1 − ) − (((1 − α12 (n)
−α13 (n)))(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)
− α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))
/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1)
−α13 (n+1)))(((1−α41n)−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n))))))/(α12 (n))−(1−)
+(((1−α41(n)−α42 (n)))((α12 (n+1))(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)
− α13 (n))))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))((1 − ) − (((1 − α12 (n)
−α13 (n)))(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)
− α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))
63
/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1)
−α13 (n+1)))(((1−α41(n)−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n))))))+1))/(α12 (n))
+ ((1 − )((((α42 (n))(((α13 (n))((1 − ) + ((1 − )(α12 (n + 1)))/(α12 (n))
+ ((α13 (n + 1))(α32 (n)))/(α12 (n)) + (((1 − α12 (n + 1) − α13 (n + 1)))(α42 (n)))
/(α12 (n))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))
((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41(n)
−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n))))+1))/(α12 (n))−(((1−α41(n)−α42 (n)))
((1 − ) + ((1 − )(α12 (n + 1)))/(α12 (n)) + ((α13 (n + 1))(α32 (n)))/(α12 (n))
+ (((1 − α12 (n + 1) − α13 (n + 1)))(α42 (n)))/(α12 (n))))/((α12 (n + 1))((α23 (n))
−((1−)(α13 (n)))/(α12 (n)))+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))
+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n)))))
((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))
/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)−α23 (n+1)))−((1−)((1−α12 (n+1)
−α13 (n+1))))/(α12 (n+1)))+((1−α12 (n+2)−α13 (n+2)))((1−)−(((1−α12 (n+1)
−α13 (n+1)))(α42 (n+1)))/(α12 (n+1))))+(α13 (n+2))((α31 (n+1))−((1−)(α32 (n+1)))
/(α12 (n + 1))) + ((1 − α12 (n + 2) − α13 (n + 2)))((α41 (n + 1)) − ((1 − )(α42 (n + 1)))
/(α12 (n + 1))) − (((1 − )((1 − ) + ((1 − )(α12 (n + 1)))/(α12 (n)) + ((α13 (n + 1))
(α32 (n)))/(α12 (n))+(((1−α12 (n+1)−α13 (n+1)))(α42 (n)))/(α12 (n))))/((α12 (n+1))
((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))
(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))
(α42 (n)))/(α12 (n)))) − ((α32 (n))(((α13 (n))((1 − ) + ((1 − )(α12 (n + 1)))
/(α12 (n)) + ((α13 (n + 1))(α32 (n)))/(α12 (n)) + (((1 − α12 (n + 1) − α13 (n + 1)))
(α42 (n)))/(α12 (n))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n)))
+ (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1)
64
−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n))))+1))/(α12 (n)))
(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))
/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1)))
+ (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1)))) + (α12 (n + 2))
((α21 (n+1))−((1−)(1−))/(α12 (n+1)))))/((((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)
−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))/(α12 (n+1)))+(α12 (n+2))((α23 (n+1))
− ((1 − )(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))
(α32 (n + 1)))/(α12 (n + 1))))(((α32 (n))(((1 − α12 (n) − α13 (n))) − ((α13 (n))
((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )((1 − α12 (n) − α13 (n))))/(α12 (n)))
+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))(α42 (n)))/(α12 (n)))
+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))/(α12 (n)))))
/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − )
−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))
− ((α13 (n))(α42 (n)))/(α12 (n))))))/(α12 (n)) − ((1 − α31 (n) − α32 (n))) + ((1 − )
((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )((1 − α12 (n) − α13 (n))))/(α12 (n)))
+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))(α42 (n)))/(α12 (n+2))));
a2 (n) = ((((α32 (n+1))(((1−α12 (n+1)−α13 (n+1)))−((α13 (n+1))((α13 (n+2))
(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))
+(α12 (n+2))(((1−α21 (n+1)−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))/
(α12 (n+1)))+((1−α12 (n+2)−α13 (n+2)))((1−)−(((1−α12 (n+1)−α13 (n+1)))
(α42 (n+1)))/(α12 (n+1)))))/(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))
− ((α13 (n + 1))(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )
65
(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))
/(α12 (n+1))))))/(α12 (n+1))−((1−α31 (n+1)−α32 (n+1)))+((1−)((α13 (n+2))
(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))
+(α12 (n+2))(((1−α21 (n+1)−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))
/(α12 (n+1)))+((1−α12 (n+2)−α13 (n+2)))((1−)−(((1−α12 (n+1)−α13 (n+1)))
(α42 (n+1)))/(α12 (n+1)))))/(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))
− ((α13 (n + 1))(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )
(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))
/(α12 (n+1)))))(((1−α12 (n+3)−α13 (n+3)))(((1−α41 (n+2)−α42 (n+2)))−((α13 (n+2))
(α42 (n + 2)))/(α12 (n + 2))) + (α12 (n + 3))((α23 (n + 2)) − ((1 − )(α13 (n + 2)))
/(α12 (n + 2))) + (α13 (n + 3))((1 − ) − ((α13 (n + 2))(α32 (n + 2)))/(α12 (n + 2))))
+(((α42 (n+1))(((1−α12 (n+1)−α13 (n+1)))−((α13 (n+1))((α13 (n+2))(((1−α31 (n+1)
−α32 (n+1)))−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))
(((1−α21 (n+1)−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))
+((1−α12 (n+2)−α13 (n+2)))((1−)−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))
/(α12 (n+1)))))/(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))
(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))
/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1))))))
/(α12 (n+1))−(1−)+(((1−α41 (n+1)−α42 (n+1)))((α13 (n+2))(((1−α31 (n+1)
−α32 (n+1)))−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))
(((1−α21 (n+1)−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))
+((1−α12 (n+2)−α13 (n+2)))((1−)−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))
/(α12 (n+1)))))/(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))
(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))
66
/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1)))))
((α13 (n+3))(((1−α31 (n+2)−α32 (n+2)))−(((1−α12 (n+2)−α13 (n+2)))(α32 (n+2)))
/(α12 (n+2)))+(α12 (n+3))(((1−α21 (n+2)−α23 (n+2)))−((1−)((1−α12 (n+2)
−α13 (n+2))))/(α12 (n+2)))+((1−α12 (n+3)−α13 (n+3)))((1−)−(((1−α12 (n+2)
− α13 (n + 2)))(α42 (n + 2)))/(α12 (n + 2)))))((((1 − α41 (n) − α42 (n)))((((α12 (n + 1))
(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)
− α13 (n + 1)))((1 − ) − (((1 − α12 (n) − α13 (n)))(α42 (n)))/(α12 (n))) + (α13 (n + 1))
(((1 − α31 (n) − α32 (n))) − (((1 − α12 (n) − α13 (n)))(α32 (n)))/(α12 (n))))((1 − )
+ ((1 − )/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))
((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))
(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n)))) − ((α13 (n))(α32 (n)))
/((α12 (n))((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))
((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)
−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n))))))(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)
−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))/(α12 (n+1)))+(α12 (n+2))((α23 (n+1))
−((1−)(α13 (n+1)))/(α12 (n+1)))+(α13 (n+2))((1−)−((α13 (n+1))(α32 (n+1)))
/(α12 (n+1))))+(((1−α41 (n)−α42 (n)))/((α12 (n+1))((α23 (n))−((1−)(α13 (n)))
/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1)
− α13 (n + 1)))(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n)))) − ((α13 (n))
(α42 (n)))/((α12 (n))((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n)))
+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))
(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n))))))((α13 (n + 2))
(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))
+(α12 (n+2))(((1−α21 (n+1)−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))
/(α12 (n+1)))+((1−α12 (n+2)−α13 (n+2)))((1−)−(((1−α12 (n+1)−α13 (n+1)))
67
(α42 (n+1)))/(α12 (n+1))))+((α13 (n+2))(α32 (n+1)))/(α12 (n+1))+(((1−α12 (n+2)
− α13 (n + 2)))(α42 (n + 1)))/(α12 (n + 1)) + ((1 − )(α12 (n + 2)))/(α12 (n + 1))))/
((((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))
/(α12 (n+1)))+(α12 (n+2))((α23 (n+1))−((1−)(α13 (n+1)))/(α12 (n+1)))+(α13 (n+2))
((1−)−((α13 (n+1))(α32 (n+1)))/(α12 (n+1))))(((α32 (n))(((1−α12 (n)−α13 (n)))
− ((α13 (n))((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )((1 − α12 (n) − α13 (n))))
/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))(α42 (n)))
/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))
/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))
((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))
(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n))))))/(α12 (n))−((1−α31 (n)
−α32 (n)))+((1−)((α12 (n+1))(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)−α13 (n))))
/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))(α42 (n)))/(α12 (n)))
+ (α13 (n + 1))(((1 − α31 (n) − α32 (n))) − (((1 − α12 (n) − α13 (n)))(α32 (n)))
/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − )
−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))
− ((α13 (n))(α42 (n)))/(α12 (n))))) + ((α13 (n + 2))(((1 − α31 (n + 1) − α32 (n + 1)))
−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)
−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))+((1−α12 (n+2)
−α13 (n+2)))((1−)−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))/(α12 (n+1))))(((α42 (n))
(((1 − α12 (n) − α13 (n))) − ((α13 (n))((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )
((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)
−α13 (n)))(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)
− α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))
68
/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n)))
+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n))))))
/(α12 (n)) − (1 − ) + (((1 − α41 (n) − α42 (n)))((α12 (n + 1))(((1 − α21 (n) − α23 (n)))
− ((1 − )((1 − α12 (n) − α13 (n))))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))((1 − )
− (((1 − α12 (n) − α13 (n)))(α42 (n)))/(α12 (n))) + (α13 (n + 1))(((1 − α31 (n)
− α32 (n))) − (((1 − α12 (n) − α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n))
− ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))
/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))
/(α12 (n))))))−1))/((α12 (n+1))((α23 (n))−((1−)(α13 (n)))/(α12 (n)))+(α13 (n+1))
((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)
−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n))))−((1−)((1−)+((1−)/((α12 (n+1))
((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))
− α13 (n + 1)))(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n)))) − ((α13 (n))
(α32 (n)))/((α12 (n))((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n)))
+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))
(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n))))))(((1 − α12 (n + 2)
−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))/(α12 (n+1)))
+ (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))
((1−)−((α13 (n+1))(α32 (n+1)))/(α12 (n+1))))+(((1−α41 (n)−α42 (n)))/((α12 (n+1))
((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))
(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))
(α42 (n)))/(α12 (n)))) − ((α13 (n))(α42 (n)))/((α12 (n))((α12 (n + 1))((α23 (n))
− ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))
/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))
69
/(α12 (n))))))((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)−α13 (n+1)))
(α32 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))(((1 − α21 (n + 1) − α23 (n + 1)))
−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))+((1−α12 (n+2)−α13 (n+2)))((1−)
−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))/(α12 (n+1))))+((α13 (n+2))(α32 (n+1)))
/(α12 (n + 1)) + (((1 − α12 (n + 2) − α13 (n + 2)))(α42 (n + 1)))/(α12 (n + 1)) + ((1 − )
(α12 (n+2)))/(α12 (n+1))))/((((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))
− ((α13 (n + 1))(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )
(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))
/(α12 (n + 1))))(((α32 (n))(((1 − α12 (n) − α13 (n))) − ((α13 (n))((α12 (n + 1))
(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)
− α13 (n + 1)))((1 − ) − (((1 − α12 (n) − α13 (n)))(α42 (n)))/(α12 (n))) + (α13 (n + 1))
(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n+1))
((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))
(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))
(α42 (n)))/(α12 (n))))))/(α12 (n)) − ((1 − α31 (n) − α32 (n))) + ((1 − )((α12 (n + 1))
(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)
− α13 (n + 1)))((1 − ) − (((1 − α12 (n) − α13 (n)))(α42 (n)))/(α12 (n)))
+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))/(α12 (n)))))
/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − )
−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))
− ((α13 (n))(α42 (n)))/(α12 (n))))) + ((α13 (n + 2))(((1 − α31 (n + 1) − α32 (n + 1)))
−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)
−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))+((1−α12 (n+2)
−α13 (n+2)))((1−)−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))/(α12 (n+1))))(((α42 (n))
70
(((1−α12 (n)−α13 (n)))−((α13 (n))((α12 (n+1))(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)
−α13 (n))))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))
(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))
(α32 (n)))((α12 (n + 1))((α23 (n))/(α12 (n + 2))));
a3 (n) = (1−)+(((1−α41 (n+1)−α42 (n+1)))/(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)
−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))/(α12 (n+1)))+(α12 (n+2))((α23 (n+1))
−((1−)(α13 (n+1)))/(α12 (n+1)))+(α13 (n+2))((1−)−((α13 (n+1))(α32 (n+1)))
/(α12 (n+1))))−((α13 (n+1))(α42 (n+1)))/((α12 (n+1))(((1−α12 (n+2)−α13 (n+2)))
(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))/(α12 (n+1)))+(α12 (n+2))
((α23 (n+1))−((1−)(α13 (n+1)))/(α12 (n+1)))+(α13 (n+2))((1−)−((α13 (n+1))
(α32 (n+1)))/(α12 (n+1))))))((α13 (n+3))(((1−α31 (n+2)−α32 (n+2)))−(((1−α12 (n+2)
−α13 (n+2)))(α32 (n+2)))/(α12 (n+2)))+(α12 (n+3))(((1−α21 (n+2)−α23 (n+2)))
−((1−)((1−α12 (n+2)−α13 (n+2))))/(α12 (n+2)))+((1−α12 (n+3)−α13 (n+3)))((1−)
− (((1 − α12 (n + 2) − α13 (n + 2)))(α42 (n + 2)))/(α12 (n + 2)))) − ((((α32 (n + 1))
(((1−α12 (n+1)−α13 (n+1)))−((α13 (n+1))((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))
−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)
−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))+((1−α12 (n+2)
− α13 (n + 2)))((1 − ) − (((1 − α12 (n + 1) − α13 (n + 1)))(α42 (n + 1)))/(α12 (n + 1)))))
/(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))
/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1)))
+ (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1))))))/(α12 (n + 1))
−((1−α31 (n+1)−α32 (n+1)))+((1−)((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))
71
−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)
−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))+((1−α12 (n+2)
− α13 (n + 2)))((1 − ) − (((1 − α12 (n + 1) − α13 (n + 1)))(α42 (n + 1)))/(α12 (n + 1)))))
/(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))
/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))/(α12 (n + 1)))
+ (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1)))))(((1 − α12 (n + 3)
−α13 (n+3)))(((1−α41 (n+2)−α42 (n+2)))−((α13 (n+2))(α42 (n+2)))/(α12 (n+2)))
+ (α12 (n + 3))((α23 (n + 2)) − ((1 − )(α13 (n + 2)))/(α12 (n + 2))) + (α13 (n + 3))
((1−)−((α13 (n+2))(α32 (n+2)))/(α12 (n+2))))+(((α42 (n+1))(((1−α12 (n+1)
−α13 (n+1)))−((α13 (n+1))((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)
−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)−α23 (n+1)))
−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))+((1−α12 (n+2)−α13 (n+2)))((1−)
−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))/(α12 (n+1)))))/(((1−α12 (n+2)−α13 (n+2)))
(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))/(α12 (n+1)))+(α12 (n+2))
((α23 (n+1))−((1−)(α13 (n+1)))/(α12 (n+1)))+(α13 (n+2))((1−)−((α13 (n+1))
(α32 (n+1)))/(α12 (n+1))))))/(α12 (n+1))−(1−)+(((1−α41 (n+1)−α42 (n+1)))
((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))
/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)−α23 (n+1)))−((1−)((1−α12 (n+1)
−α13 (n+1))))/(α12 (n+1)))+((1−α12 (n+2)−α13 (n+2)))((1−)−(((1−α12 (n+1)
−(α42 (n+1)))/(α12 (n+1)))))/(((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))
− ((α13 (n + 1))(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )
(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))
/(α12 (n+1)))))((α13 (n+3))(((1−α31 (n+2)−α32 (n+2)))−(((1−α12 (n+2)−α13 (n+2)))
(α32 (n + 2)))/(α12 (n + 2))) + (α12 (n + 3))(((1 − α21 (n + 2) − α23 (n + 2))) − ((1 − )
72
((1 − α12 (n + 2) − α13 (n + 2))))/(α12 (n + 2))) + ((1 − α12 (n + 3) − α13 (n + 3)))((1 − )
−(((1−α12 (n+2)−α13 (n+2)))(α42 (n+2)))/(α12 (n+2)))))(((α42 (n))(((1−α12 (n)
−α13 (n)))/((((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))
(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )(α13 (n + 1)))
/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))/(α12 (n + 1))))
(((α32 (n))(((1 − α12 (n) − α13 (n))) − ((α13 (n))((α12 (n + 1))(((1 − α21 (n) − α23 (n)))
− ((1 − )((1 − α12 (n) − α13 (n))))/(α12 (n))) + ((1 − α12 (n + 1) − α13 (n + 1)))((1 − )
−(((1−α12 (n)−α13 (n)))(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))
− (((1 − α12 (n) − α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )
(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n)))
+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))/(α12 (n))))))
/(α12 (n))−((1−α31 (n)−α32 (n)))+((1−)((α12 (n+1))(((1−α21 (n)−α23 (n)))−((1−)
((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)
−α13 (n)))(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)
−α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n+1))((α23 (n))−((1−)(α13 (n)))/(α12 (n)))
+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))
(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n))))) + ((α13 (n + 2))
(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))
+(α12 (n+2))(((1−α21 (n+1)−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))
/(α12 (n+1)))+((1−α12 (n+2)−α13 (n+2)))((1−)−(((1−α12 (n+1)−α13 (n+1)))
(α42 (n + 1)))/(α12 (n + 1))))(((α42 (n))(((1 − α12 (n) − α13 (n))) − ((α13 (n))
((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )((1 − α12 (n) − α13 (n))))/(α12 (n)))
+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))(α42 (n)))/(α12 (n)))
+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))/(α12 (n)))))
73
/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − )
−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))
− ((α13 (n))(α42 (n)))/(α12 (n))))))/(α12 (n)) − (1 − ) + (((1 − α41 (n) − α42 (n)))
((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )((1 − α12 (n) − α13 (n))))/(α12 (n)))
+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))(α42 (n)))/(α12 (n)))
+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))/(α12 (n)))))
/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − )
−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))
− ((α13 (n))(α42 (n)))/(α12 (n)))))) − ((α13 (n))((α12 (n + 1))(((1 − α21 (n)
−α23 (n)))−((1−)((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((1−)
−(((1−α12 (n)−α13 (n)))(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))
− (((1 − α12 (n) − α13 (n)))(α32 (n)))/(α12 (n)))))/(((((1 − α12 (n + 2) − α13 (n + 2)))
(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))/(α12 (n+1)))+(α12 (n+2))
((α23 (n+1))−((1−)(α13 (n+1)))/(α12 (n+1)))+(α13 (n+2))((1−)−((α13 (n+1))
(α32 (n + 1)))/(α12 (n + 1))))(((α32 (n))(((1 − α12 (n) − α13 (n))) − ((α13 (n))
((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )((1 − α12 (n) − α13 (n))))/(α12 (n)))
+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))(α42 (n)))/(α12 (n)))
+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))/(α12 (n)))))
/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − )
−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))
− ((α13 (n))(α42 (n)))/(α12 (n))))))/(α12 (n)) − ((1 − α31 (n) − α32 (n))) + ((1 − )
((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )((1 − α12 (n) − α13 (n))))/(α12 (n)))
+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))(α42 (n)))/(α12 (n)))
+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))/(α12 (n)))))
74
/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − )
−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))
− ((α13 (n))(α42 (n)))/(α12 (n))))) + ((α13 (n + 2))(((1 − α31 (n + 1) − α32 (n + 1)))
−(((1−α12 (n+1)−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)
−α23 (n+1)))−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))+((1−α12 (n+2)
−α13 (n+2)))((1−)−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))/(α12 (n+1))))(((α42 (n))
(((1 − α12 (n) − α13 (n))) − ((α13 (n))((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )
((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)
−α13 (n)))(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)
− α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))
/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))/(α12 (n))) + ((1 − α12 (n + 1)
− α13 (n + 1)))(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n))))))/(α12 (n))
−(1−)+(((1−α41 (n)−α42 (n)))((α12 (n+1))(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)
−α13 (n))))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))
(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))
(α32 (n)))/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n)))
+(α13 (n+1))((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))
(((1 − α41 (n) − α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n))))))((α12 (n + 1))
((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))(α32 (n)))
/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))(α42 (n)))
/(α12 (n)))))))/(α12 (n))−(1−)/((((1−α12 (n+2)−α13 (n+2)))(((1−α41 (n+1)−α42 (n+1)))
− ((α13 (n + 1))(α42 (n + 1)))/(α12 (n + 1))) + (α12 (n + 2))((α23 (n + 1)) − ((1 − )
(α13 (n + 1)))/(α12 (n + 1))) + (α13 (n + 2))((1 − ) − ((α13 (n + 1))(α32 (n + 1)))
/(α12 (n + 1))))(((α32 (n))(((1 − α12 (n) − α13 (n))) − ((α13 (n))((α12 (n + 1))
(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)
75
− α13 (n + 1)))((1 − ) − (((1 − α12 (n) − α13 (n)))(α42 (n)))/(α12 (n))) + (α13 (n + 1))
(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n+1))
((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))
(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))
(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)
−α13 (n+1)))((1−)−(((1−α12 (n)(α42 (n)))/(α12 (n))))))/(α12 (n))−((1−α31 (n)
− α32 (n))) + ((1 − )((α12 (n + 1)) − α13 (n)))(α42 (n)))/(α12 (n))) + (α13 (n + 1))
(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))/(α12 (n)))))/((α12 (n+1))
((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − ) − ((α13 (n))
(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))−((α13 (n))
(α42 (n)))/(α12 (n)))))+((α13 (n+2))(((1−α31 (n+1)−α32 (n+1)))−(((1−α12 (n+1)
−α13 (n+1)))(α32 (n+1)))/(α12 (n+1)))+(α12 (n+2))(((1−α21 (n+1)−α23 (n+1)))
−((1−)((1−α12 (n+1)−α13 (n+1))))/(α12 (n+1)))+((1−α12 (n+2)−α13 (n+2)))((1−)
−(((1−α12 (n+1)−α13 (n+1)))(α42 (n+1)))/(α12 (n+1))))(((α42 (n))(((1−α12 (n)
− α13 (n))) − ((α13 (n))((α12 (n + 1))(((1 − α21 (n) − α23 (n))) − ((1 − )((1 − α12 (n)
−α13 (n))))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))
(α42 (n)))/(α12 (n)))+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))
/(α12 (n)))))/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))
((1−)−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)
− α42 (n))) − ((α13 (n))(α42 (n)))/(α12 (n))))))/(α12 (n)) − (1 − ) + (((1 − α41 (n)
−α42 (n)))((α12 (n+1))(((1−α21 (n)−α23 (n)))−((1−)((1−α12 (n)−α13 (n))))/(α12 (n)))
+((1−α12 (n+1)−α13 (n+1)))((1−)−(((1−α12 (n)−α13 (n)))(α42 (n)))/(α12 (n)))
+(α13 (n+1))(((1−α31 (n)−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))/(α12 (n)))))
/((α12 (n + 1))((α23 (n)) − ((1 − )(α13 (n)))/(α12 (n))) + (α13 (n + 1))((1 − )
76
−((α13 (n))(α32 (n)))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))(((1−α41 (n)−α42 (n)))
−((α13 (n))(α42 (n)))/(α12 (n))))))+(((1−α41 (n)−α42 (n)))((α12 (n+1))(((1−α21 (n)
−α23 (n)))−((1−)((1−α12 (n)−α13 (n))))/(α12 (n)))+((1−α12 (n+1)−α13 (n+1)))
((1 − ) − (((1 − α12 (n) − α13 (n)))(α42 (n)))/(α12 (n))) + (α13 (n + 1))(((1 − α31 (n)
−α32 (n)))−(((1−α12 (n)−α13 (n)))(α32 (n)))/(α12 (n)))))/(((((1−α12 (n+2)−α13 (n+2)))
(((1−α41 (n+1)−α42 (n+1)))−((α13 (n+1))(α42 (n+1)))/(α12 (n+1)))+(α12 (n+2))
((α23 (n+1))−((1−)(α13 (n+1)))/(α12 (n+1)))+(α13 (n+2))((1−)−((α13 (n+1))
(α32 (n + 1)))/(α12 (n + 1)))) + ((1 − )(α12 (n + 3)))/(α12 (n + 2));
77