Document 14865848
advertisement

PraceedinBsal Inkmational ConJeenc. Oa Chenical ahd BioprccessEnsineerins
2/'
2y AuR6t 2003, Univenni Molaysia Sab.h, Kata Kinabah
Developmentof a Robust llybrid Estimator using Partial Least SquaresRegression
and Arfifrcial Neural Networks
Arshad Ahmadr
Lim Wan Piang'
' IAboratory of PrccessControl, Departnent of Chenical Engineefing,Faculu of Chemicaland NaturuI Resources
Eneineering,Universiti TeknologiMalatsia, 81310Skudai,Joho. MalaysiTel: +60-7-553.56I 0, Far: +60-7-558-I 463, E-nail: arshad@lkkksa.utn.n)
' Laboratory of ProcessControl, Depatnent of ChemicalEnqineein|, Facult-lof Chenical a d Natural Resources
'
Engineering,Uniyetiti TeknologiMal1ysia,I 13I0 Skudti, Johor, Malaysia
TeI: +60-7-553-5858,E-nnil: wanpiaig@hotmail.con
Abstract
Measurementdifrculry is one of the processcontrcl issues
atising frcm the conpleity and the lack of on-lirc
neasurenent devices. One of the ake at e solutions to
deal with this problem is infercnlial estimation where
secondaryvariables,such as temperatureanclpressureare
usedto prcdict the unmeasurcdpinary variables that arc
nahlt product qualities. mis paper presentsthe estination
of ptoduct conposhions for a fatry acid fructioMtion
colunn using a hybnd kchnique. Theproposed technique
combines paftial least squares r.srcssion (PIS) utd
artifcial neural netwotks(ANN) in an estination paradiqm
to provide better estinntion prcpenies. The aim js to take
odvantaSeof ANN capability to captwe the ntn-linear
rclationships as well as the statistical strength of PIS
method. The rcsults of prccess estination usine both PI.s
and htbrid nethoh arc presented- The signifcant
imprcvementobtained by the htbrid strciegt re|ealed its
capabilitt as a potentially riable estimator for prodtlct
propertiesin chenical industry.
Keywords:
Inferential Estimation, Partial l€ast SquaresRegression,
Artificial NeuralNetworks,Hybrid Model, Robushess
Introduction
The world (end o[ chemicalproduclionis now moving
lowards tull capacity operation with zero accidents,zero
emissions and high profitability. Under this stringent
environment,many plantshavebeenforced to revamptheir
exhting control system.However,Foblems that are related
to process dynamic and measuremeni remain largely
unsolved,evenwhenadvancedcontrolsystemis in place.
Processdynamicissuesaie often relatedto the non"linearity
of chemical processes while problems arisiflg from
measurementare mainly due to difficulty in implementing
on-lin€ measurements.For example, an online gas
780
chromatograph, a cornmon instrumentation for the
mearurementof product composilions,is not suitable fo.
orline application in many cases.This is due to the low
sampling rate and occasional result inconsistency.
Furthermore, it is not economic ftom the viewpoint of
operationaland maintenancecost. Due ro rhesedifficulries,
inferential esaimationhasbeenrecommendedas one of the
altemativesolution.
Inferenrial estimation is a strategy ihat employs lhe
measuement of secondary Focess outputs such a3
temperaturesand pressures,to infer the unmeasurable
disturbanceson primary processoutputs, such as producl
compositions
l. For example, intermediare tray
temperaures are usually being used to predict product
compositionsin a distillation column. Hence,the main role
of the estimator is to predict the pdnary variables using
selectedsecondaryvadables.The estimatedvaluesare $en
fed into the controller for control purloses. For practical
implementation, th€ estimator should provide reliable
predjctionof theunmeasured.
Backgound of Inferential Estimation
Since the development of infercntial conrol in 19?0s,
various apprgachesto constructthe process€stimatorhave
been widely studied.The fundamentalmethodis ro uselhe
inforrnationof theprocess,suchasmassandenergybalances,
to constructthe estimaror.Although this is a reliable and
dircct approach, the developmenlsof such models aft
laborious and knowtedge intensive. For $ese rcasons,
researchen have been formulating altemative methods.
Most of thesemethodsuse rhe input-ourputdata and some
basic knowledge of the process to develop the process
estimator,such as Kalman filtering, sratisticalmethodsand
blackbox modellingmethods.
Application of statistical methods in chemical process
modelling and control is not new. These methodsinclude
linear rcgression(LR), multiple linear re$essions (MLR),
principal componentregession (PCR),principal componenr
analysis (PCA) and partial least squareregression(PLS).
MLR is amongthe most widely appliedmethodsin chemical
industry for estimation.Recendy,the PLS nethod is also
ISBN:983-2&3-15-5
Pnc.edius ol l.tetwtiual Cdfcrence On Chefticat and Biauoc*s Encineerins
27' - 2y Ausu$ 2AB , anive^ni Malorsia sdbah, rab Kinabalu
gainingpopularityin this field comparcdwith moreclassical
MLR and PCR due to its robustness [2] In process
estimalion,the use of PLS was pione€redby Mejdell and
Skogestad13,41.Over the years, they had develoPedthe
comDositionesdhator usitg PCR and PLS models for a
whichwerebased
coluninTheestimators,
b;na;ydisrillation
dataand muitiple lempefaturemeasuremenls,
on steady-state
performed well in vadous conditions such as
muiti-component mixtures, pressure variations, and
nonlinearity. Dealing with the problems of mnlinearity
and noise in distillation column, they Foposed the use of
'additional faclors, weighting functions, and logarithmic
Someotherresearchenhad also investigatedthd application
of PLS in Drocessestimation and con$ol. Budman and
co-workers[5] addfessedthe developmentof a robust
inferentialestimaiorfor a packed-bedreactorby using PLS
model. This estimator was then comparing wjth another
estjmatordevelopedby using Kalman filter technique.
Resultsshowedthat PLS estimatorwas sjgnificantly more
accuratefor estimating the actual concentrationin a wide
rangeof operatingconditions.Another exampleis the work
by Kresta and co-workers [6]. Their estimator,which was
designed to estimate the distillatior compositions, had
showngoodpredicdonwhendealingwith largenumbersof
hjghly correlatedmeasuredvariableswithout over"fitting.
They had also proved that the model was more robust io
missingdataandsensorfailures.
The PLS model had been inferior due to its dependencyon
steady state data and insufficiency when dealing with
non-linearsystem{51.EfTortsto improve this techniquein
oder !o deatwith both dynamc and non-linearFo€ess had
beenexplored.Dayal & Maccregor [7l Foposed recusive
exponentiallyweightedPLS algorithmto imFove parameter
estimation.This newly developedalgorithm was testedon a
muitivariable CSTR and an industrial mineral floating
circuil. In the estimationof distillation compositions,Kano
and co-workers [8] canied out a comprehensivestudy of
dynamicPLSto improvethe accuracyofestimation by using
simulated tirn€ series data. They concluded that the
esiimationof top andbottomcolumn quality basedon reflux
flow mte, reboiler duty, pressure and multiple tray
tempemhrres was much better than th€ usual tray
tempemturecontrol system.
Arc$er approachto extendthe PLS model in dealing with
dynamicandnonlinearsystemis by hybridisingthe model
with other modelling pamdigm such as artificial neu|al
network (ANN). The useof ANN wi6in thePLS rnodelling
paradigmandwas first recommendedby Qin & McAvoy t9l,
The capability of ANN model in dealine with non-linear
systemhadinspiredthe mergingof thesemethodr.Sincethe
rcsults of the NNPLS model were encouraging,someother
researchershad also worked on this field to improve the
modelcapabilities,Baffi and co-workers001 had proposed
two extensionsmodels. These were the nodified NNPLS
and Iadjal basisfunction network PLS (RBFPLS). Boih of
ihese model employed enor-basedinput weights updaling
procedure !o improve the prediction capability.
ISBN:983-2643-15-5
Consequendy,Abebiyi & Cotipio [1 l] hadalsocarriedout
similar investigarionto NNPI-S model. They proposeda
dynamic NNPLS (DNNPLS) in which the static neural
network modelsin the inner relationshipwere replacedby
dynamic neuml network models. This approachhad been
tesled with the data hom a highly ron-linear fluidised
catalytic cracking unit and an isothemal r€actor. Results
showedthat the prediction was as good as a MIMO neural
network andit wasbetier than PLS-ARMA model.
Partial Least SquaresRegression
Partial least squaresregession is one of the multivariate
analysismethods.It is a linear systemidentification method
that projectsthe input-outputdatadown into a latent space,
extracts a number of principal factors with aD orthogonal
s&ucture,while capnrringmostof the variancein theoriginal
data [2]. Derails description of the PLS st$cture can be
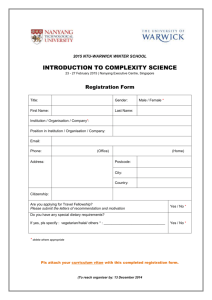
The schematicdiagam of the PLS model is illustrated in
Figurc l. [t consists of two outer relations and an inner
relation.The outerrclations are the matrixesof independenr
anddependentvariabl€s,which canbe representedby X and
Y, respectively.The inpul X is projectedinto the latentspace
by the input-loadingfacaor,P to obtain the input scores,T.
Similarly, the output scores,U is obtainedby projecting the
outputY inlo lateni spacethroughthe outputloading factor,
Q. These relations are in matdx form and are written in
Equation(l) and (2).
Outerrelations:
X = TPr + E/
(1)
Y = UQ r+ F r
(2)
!$s!-&s!
h 'r '& o i 'a r o h |
Fisure t Schenaticofthe PIS Model t I I l
The matricesEr andF.rareresidualsof X andY, rcspernvely
X and Y arc linked with a linear regressioncalled inner
relation to capturethe relationshipbetweenthe inputs and
output latent scores.The notation of the inner relation is
written in Equation(3).
lnner r€lation:
U = TB
(3)
The Focedwe of determiningthe scoresand loadingsfactor
is caried out sequentiallyfrom the flrst factor to the J'lh
factor. Scoresand loading rectors for each faclor is
calculatedfrom the prcvious residualmairicesas shown in
Equation(4) and (5), whereinitially E0= X andF0 = Y.
781
Proceedin.sol lntematiahat ConJerence
On chennal o.d Bioprcce$ En,inerthg
27tu -2q Aug& 2AB, Unive^ni Mokttsio sabah,Kohki&bat;
ForX,
Fr=Frt -r.If
(4\
For Y,
&=&.,-urQi'
(5)
Caiculation of ihe inner and outer relations is performed
unlil th€ lasi factor,/or when residualmatricesare below
certainthreshold.
Hybrid PLS-ANNModel
The hybnd PLS-ANN model is construcred
basedon tbe
NNPLS nodel I9l. As mentioned before, this rechnique
incorporatedf€edforwardoerworksinto the PLS modelling,
whereFFN is usedto capturethe nonlineariiy in the model
whilethestatisrjcal
strengthofPLS is mainrained.
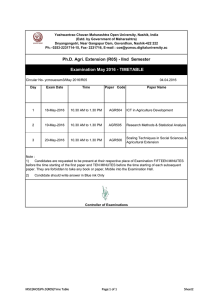
The schematicdiagram of a NNPLS nodel is depicr,edin
Figure 2. As rnentionedabove,a convenrionalPLS model
consistsof outerand inner relations,whereboth of these
relationsare representedin linear form. In NNPLS model,
the PLS outer relations are kept linear to transform the
original datainto scorcfactors(U andT). On the otherhand,
neural networks are accomplishedin the irner relation as
writtenin Equation(6):
controlof productcomposirjons
is achieredby controlJing
tempemture at selected location. However, this control
schemecanlot funcrion very welt due to distu$ancesin the
feed composition.This has qeared somedifficulries in the
compositioncontol and at times, off-specificarionproducts
have beenproduced.In rhis Fojecr, the focus is on the
developmenr
of a robustinferenriat
eslimaror
for thelight cu1
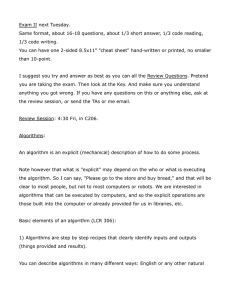
Light cut columnis a packeddisrillationcolurnnconsisting
of thiee sections, which are srripping, recriflng and
condensingsection.This colurm is operaltd under vacuum
condition inducedby steamejector. The schernaticdiagram
of this colurDnis depictedin Figure 3. The feedstockof light
cut columnis the bottomproductfrom pre-cutcolumnwjth
fatty acidsrangingfrom C-10 to C-l8. The intet temperature
rs around 220PCat pressufe aiound 6.84 kpa. Disrillare
productfmm thiscolunn is C-12with around98 qo,andrhe
bottomproducrs.which aremainty C,l4 to C- I 8 arethenfed
!o the next column.
(6)
rrJ=r{{tt) + rr
whe.er{(, standsfor lhe nonlinear relation representedby
a neuralnetwork.Here, the training dak is rhe scorefactors
generatedfrom the outer relations.
L
6
x
tl
F,
q
t
d
#
t
FiEurc 2 A Schenatic lusttution of NNPIS Model [9]
Figu/e 3 UEht Cut Cotunn in the Fatt, Acids
Frucrionation
Plant
Dynamic PIatrt Simulation
Problem Definition
The aim of this paper is ro develop a robust inferentjal
estimatorby usjnghybrid PLS-ANN modelbasedon on-line
measuementsof processvariables,such as flow raies and
temperatures,For pmclical implementation,the estimator
should able to provide accurateprediction, and the model
must be robust enough ro delal witb distwbances and
changing
of operating
conditions.
ProcessDescription
The casestudyconsidered
hereis rhelight cut columnofa
local fatty acids fractionationplant. At plesent,indirect
782
The dynamicsimulationwascarriedout usinsIrySys.planr
simulalor.Basedon lhe processflo* diagrai providedby a
local
$e lighLcur columnmodelwas sel. Here,
seven'ndusFy.
contml loops were activated, These are shown in
Figue 3. Simulatior wascarriedour in both steadystateand
dynamic modes. Results of the dynamic simulation were
comparedto the actual data collected from the planr DCS
system.MoniLoringand runing of lhe conrol loop \Las
cs.rnedoul unLil the simulaLionresulrswere in close
agreementwith the actualdata.
Sensitivity Analysis
Since the estimation model was data based,selection of
ISBNr983-2643,15-5
Pnceediass oJlnkmatio8l Conf.Eace On Chenicll and Biaptuces Eqinee ne
27 - 2q AusBt 2003. Unir.fiti Malatsia Sabah,Kota Kinaboh
inpul and oulpuLvariablesis imponant Thus'
aDDroDriale
ofboth openandclosedloopsyslemwas
.insiLiuiryanaiysis
the dynarnicbehaviourof process
carriedour ro investigare
var;ablessuch as llos rales. liquid level temperarures
and producrcomposidonsThis was done by
Drcssure,
imoosineslepschangesLovatiousprocessrsinpuLsuchas
and now mre\' The effectson the process
r"riroerarures
as
Fay temperaturesand productcompositions
such
outputs
wereihenexamjned.Theseresponseswere usedasgurdesIo
selectappropriateinput andoutput variablesthat aresuitable
for modeldeveloPment
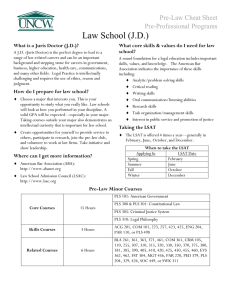
resuhsis shownin
anaivsis
of lhesensilivil)
An examDle
in
the
feed
tempersure was
increase
a
5%
Fisure 4: Here,
fraction is
the-C-I2
mole
show
lhat
Results
iniroduced.
that
the feed
0935
It
means
0.98
to
about
from
droDD€d
hassignificanleffecton theC-12moleftaction.
rempirature
Basio on the rcsultsof sensitivityanalysis,four input
orocess variables had been selected, namely the feed
temperature,thetop column temperatue,the reflux flow mte
and the recycleflow mte. Since tray temperatureshad been
pmvenasthesecondaryvariablesthat arecommonlyusedin
inferential estimation[3,8], four tray temperatureshad also
beenchosen.Thesevariableswerethenusedasinpuls for the
to Fedict the compositionof C- 12 falty
inferential.estimator
acid,
asn=j'Lr,; -it I'
('7)
(8)
Hefe,.xis themeasurement
i is
of theproducfcomposition,
its estimaajon
value,tis the meanvalueof measurements,
and/y'is the numberof measurement,
PLS Estimator
The strengthof PLS model is its capability to deal with a
large set of correlateddata. For tie unity of the data, the
selected input variables should be mean-centred€trd
variancescal€dthroughEquation9 and 10,rcspectivety.
(e)
,=z'
'I
d
l | S i ,.
N Z' \' t
Model Development
In,this section, develobment of the infercntial estimator
rbased.on both PLS and hybrid PLS'ANN model are
'descnbed. The perfomB ces of these esdmatoa! 8re
the basis of mean squaredefior of.ptediction
evaluated.on.
.( 4SE) and the explained prediction variance (EPV) The
' calculadons
ofMSE andEPV areshow! in Equation? and8,
respecnvely:
(t0)
12
-; 12|
'
l
Here,.zis an input vadable, Z is.the nieanvalueofdie input
set, z, is a meancentredvalue , z, is the meancenti€d and
variancescaledvalue, and,{ is the number of inputs in a
dataset.
Fernl.n'rxntns fCl
'"1
i o.!.1
o.e.l
J
€
9l
l,*l
F*^r
* *l
i*l
:l
l:
i*
9"
9e
Jyj
?'r
! 6l
I
:t
E
r
lrl
i't
o@ t
5
E".,
a
Fjgure4 DynanicResponse
in .theFeedTemp€rature
of 57oIncreas€
ISBN:983-2f43-15-5
783
Pruuedines of lntewtional CohfeenceOn Chenical and Biopmes Eui@erinq
27' - 2q' Augui 2AB . U,iversili Molafsia Sabah,Kora Kinabatu
The developmentof the inferen[ial model wascarried in the
The NIPALS algorithmof PLS,
MATLAB environment.
1
in
Table
which is shown
, wastransfenedto the platform of
MATLAB using its programmingianguage.The model was
first trainedusing a training daaain o.der to obtain the
associatescorefactors.The numbersof latent variablewere
setat 20. After the training, the scorefactorswere kept, and
tbey were further used to cross validate different sets of
data.TheseresuLts
arcshownin Figure5.
operating
.
DaaaA - Nomlal operatingcondilions
.
Data B - Intermediatefluctuations
.
Data C - Severefluctuarions
The pur?ose of the evaluation was to investigate the
accuracyandrobustnessof the model.The actualvaluesand
the prediction resultsof thesedataare plotted in Figure 6, 7
and8.
E.lrrurloior cr2 MoreF6dro. (rralnlngDab)
Table t NIPAIS Alsonhm olthe PIs Model I2J0l
Step
Srmmary of Steps
0
MeancentreandscaleX andY
I
Settheouiputscoresu equalto
2
Computeinput weightsw by
regressingX on u
3
Nonnalisew lo unit length
4
theinputscorest
Calculate
,!
ur. x
r
i' "
3."
Xw
Figure 5 Training Resultsby Using PIS and Htbrid
PI,s-ANNModels
Computeoutputloadingsq by
regressing
Y on I
-
6
Normaliseq to unit lenglh
q = q/llq
,7
newoutputscoresu
Calculate
5
-
tTY
t_.t
Y.q
qr'q
8
Ch€ckconvergence
on u. If
yesgo to step9 elsego to 2
9
Calculatethe inpul loadingsp
by regressing
X on t
'
10
i.{ormalisep to unit length
p=p4hll
ll
Computeinnermodel
regression
co-effic;entb
,
-
t2
Calculate
inputresidualmatrix
ll
Calculateinput residualmatrix
tr.X
t' .t
tT,u
tTt
E=X-t.pr
F=Y-b
txqr
lf additionalPLSdimensions
arenecessary,replaceX and Y
by E andF, respectivelyand
repeatstepsI to 13
In order to evaluate the Derformanceof the infereotial
estimator,the model was testedon three setsof data.They
weremadeup of differen! opsating conditions:
'184
Formulation of Hybfid PLS-ANN Model
As mentioned earlier, tne PfS model is a lineaf
identification method.In order to improve the ability of the
nodel to dealwith non-linearsystem,a hybrid model,called
bybrid PLS-ANN model were formulated. A feed forward
network with one hidden layer was incor?oratedinlo the
PLS model. Hence, it replacedthe linear inner model and
includesthe nonlinear featurein the PLS modet.Similar to
the PLS model,$e hybdd modelwasbuilt in the MATLAB
environmentusing both the Neural Network Toolbox ,nd
ihe MATLAB programminglanguage.
The network was a single input single output (SISO)
network,wberethe inputswerethe matnx of scorefactofi, T,
and the outputs were the matrix of scorefacto$, U. Before
the network training, it is important to determinethe 'best'
networktopologyto avoid the problemsof eitherover'fitling
or under- fitting. Hence, the optimal number of hidden
neuronsshould be decided.In this work, we usedtrial and
enor approach,and the numberof hiddenneuronswas
The training algorithm of this network was
Levenberg-Marquardtmethod. For network tmining, cross
validation was implementedas the stopping criteria. The
data set was split into a training set and a testing set. The
trainedmodelwasvalidatedwith tbe testingsets€quentially.
The lraining was tesninatedwhen the prediction enor of the
lesting dipped into a minimum and started to increase.
Figure 5 showsthe rraining resultsof the hybdd PLS-ANN
model.
Similar with the PLS estimator,the bybrid estirnatorwas
testedon threesetsof data,rvhich were Data A. B and C to
evaluateits performance.
The predictedC-12 compositions
ISBN:981-2643-15-5
P@..dkes oJlht.ndiorul Co4l.ren.. On Cheninl and Biopruc.s Eneii.prine
27
2y Aueu! 200J, Unit.ttiti Motntsb Sabah,Kota Ki4abatu
of thesedataarc also plotted in Figurc 6, 7 and 8'
Subsequently,the periormanceof both PLS and hybrid
modelwa! comparcdwith the actualvalues
Eslimatlonol C-l2 Mole Fractlon(Cross-valldatlon
- DataA)
0,93
I
=
0,88
0.86
0.62
0.4
0
200
Fisurc 6 Esrit&tion
400
600
a00
Tlm€(MlnuleE)
1000
1200
1,too
Resultsof Data A by Using PIS and Hybrid PIS-ANN Moclels
Estlmatlonot C.l2 Mole Fractlon(Cross-valldatlon
- DaiaB)
0,93
0.96
ri
o.92
s
0,9
=
0,aa
5 0,46
0.82
0.8
0
500
1000
l50o
Tt 16 (Mtnut$)
2000
2500
Figure 7 Estimation Results of Dota B bt Asinq PIS aid Hybid PI.S-ANN Models
Edlmtlon ol o'12 ilole Fraotlon(0@.-va dalton - Datac)
5.*
=os
FiAure 8 Es,iftation Resultsaf Data C by Usins PIs aad Hybid PLS-ANNModek
ISBN:983-2643-15-5
Ptuuediqt of Inktutiovl
ConfeE .e On Chehiat an| BjaptucessEhgiheerina
27' - 2q AusN 2Oo3, Uni,e\iti Maltrsia Sabah,Kotd Kiaabat;
Discussions
Tbe meansquareenors of the trainingand validationdata
for borhPLSandhybridestimarorwere
summarised
in Table
2. For rhe rrainingdara.the optimum numberof larent
variablesthat
canbesttrainthedaiawas20.However,only5
tatentvariables
wereneeded
to trainthehybridmodel.Irwas
becausethe MSE for the cross validationrest was nol
decreasedand the EPV for the output data was not
remarkable
increased
usingmorethan5 larentvariables.
As
a resuh,thetrainingMSE of PLSmodelwaslowerwith high
percentage
ofEPV.
TabLe
2 ConpatisonofMSEandEPv for PLSand
Pl"S-ANNModel.
Data
T.aining
Evaluation
MSE
EPV
PLS
PLS.ANN
Sincethestructure
anddevelopment
of inferentialestimarors
arestillimmature,
thisfield is srill opened
for research.
Thus,
futu.e workscan be done usingd;fferentmodelstructure.
Besidesrhat,addirionaldevices.suchas fiiter andbiascan
be addedto th€ existingmodel!o improveits accuracyand
6.22758-05 13464E-M
99.38Vo
36.32%
MSE
7.4642E-07 1.0369E-06
MSE
3.3148E-051.50368-05
DataB
MSE
1.0836E-04 8.41578-05
Dala C
MSE
2.56318-04 1.69908-04
Data A
measuredFocess variables.Moreover,ihe peformance can
be improvedusilrgthe hybrid PLS-ANN nodel. Apar! from
thestatistical
melhods,ariificialneurainerworks
arealsolhe
alternativesolution to inferenrial esrimaror.A conventional
threelayerfeedforward nerworkscanbe usedro deveiopthe
model. lt is still able to give proper predicrionwith
acceptable
enors.However,whenrhemodelis resledwith a
largesetof corelateddara,it will providepoorpredicrion.
This is dueto the limilationofthe networkslructure,
where
thedalaarenotauro-correlated.
Neverthetess,
rhetimiration
can be overcome using differenr rctwork structure.
Recunentnetworks,whjch supportthe returnable
of some
dalais suspecred
to give betterresutts.
When the Pl-S model was restedon darawith diffe.ent
operalingcondirions,
the predicrionresultsweregood and
acceptable.Refening to Figure 6, 7 and 8, the predicted
compositions
werecloseto theacrualvaluefor DaraA. For
DataBandDaraC,thepredicred
resulrswerenotso accurare,
but theywerestill followingthe |rendof the actualvalues.
Thus.we can say that whenthe fluctualionin the process
wasmcreased,
fie MSE wasgettinghigheraswe .
Thesepredicted
resultscar be improvedby usingtbehybrjd
PLS-ANN estimator.Sirnilar with ih€ PLS modet,rhis
modelwas trainedand thentesredon varioussetsof dara.
Allhough the raining MSE of the hybrid model was higher
Ihan the PLS model. it can perform berter when cross
validationwasimplemented.
Resulrsshowedthatrhecross
validationMSE of thehybridmodelwerelowerin all cases.
However.tbis modelfacedthe similarlimitationsas in rhe
caseofthePLSmodel.TheresultingMSEincreases
with the
rncrease
in process
fluctuarions.
We havealsosrudiedtheinfluenceof measurement
noiseto
bothoftheseestimators.
l0% noisewasinrroduced
to three
contol variables,
which werethe top columntemperature,
reflux and recycleflow rate.The MSE of botiresumarurs
were still acceptableand rhe prediction values were
following lhe trend of the actual values.Thus, we can
conclud€thatrh€seesrimarors
havethe ability ro dealwith
Conclusion
In this paper. the inferenrial esrimaror for the product
composjtionof a fa$y acid fractionation colunm was buitr
usingPLS model.The online measured
processvariabLes
suchastraytempefaru.es,
refluxflow rate,recycleflow rate,
teed tempemtureand top column temperaturew€re used to
construct
theeslimaror.
This esrimaror
hadbeenperforming
well in variousoperaringconditions.
Moreover.ir wasable
to givegoodpred;clionundernois, condilions.
The robustnessand accuracyof de PLS esrimatorcan be
improvedby introducingnonlinearfearue irro the modet.
This paperincorporatedANN into the pLS modetto capture
thenonlinearitythatis alwaysexistsin chemicalprocesses.
The prediclionresulrsproved rhar $e performancetra.
bettercompared
with thePLSmodel.
The hybrid PI-S,ANN estimatoris thereforeconcludedro be
applicable !o chemical processes. However, rhe
understanding
of the firsr principlemodelandihe dynamic
behavjour
of rheprocess
shouldnorbeelimjnat€d
duringthe
developmentof inferential esrimator.The tacking of rhe
process information may cause to obrain an unreliable
Acknowledgments
This project is funded by lhe Ministry of Science,
Technology
andthe Environment
rhroughNationalScience
FoundationScholarshipsand IRPA researchgrant. Our
heartiestappreciationsarefor everybodywho hasdircctly or
indirecdycontribute
10thesuccess
of rhisprojecr.
Basedon theresults.we haveproventhatrhePLSinferenlial
esiinatorwasablero give goodpredidionusingrheonline
'786
ISBN:983-2643-15-5
Pn@edinss ol lnt.rnationol Codele4! On Chedical and BiaProces EiSi"eerkg
27t -2E Ausui2oa|, unieersiti MalLlsiasobah Kotu KinabaLu
References
lnferenrial
Joseoh.B, and Blosilow CB I9?8
24\3r4a5'508
Joumal
Atcht
Conirolof Proceses
Padial
l2l celadi, P.. and Kowalski B R l9R6
Ahalvtica
A
Turoial
LeAr-SquaresRegression:
ChimicaActa 185|l'1"1
of
fll Meidell,T.. andSkogescdS l99la Estimatjon
TemPerature
DiriUationcompos;tionsfrom Multiple
Regression'
Using Partial-Leasl_Squarcs
Measurements
3Ol
Research
Chemical
Industial En|ineerins
2543-2555.
S lgglb Composilion
T.. and Skogesred.
l4l N4eidell,
ColumnUsing
DisLillation
in a PiloFPlanl
estimaror
Engineering
lndustial
Temperatures.
Multiple
h
30t25
55
s
earc
-2564
nical
Re
Che
I5l Budman,H.M.. Webb.C., Holcomb,T.R.' andMorari'
M. 1992.RobustInferentialCoolrolfor a Packed-Bed
R:e^ctoLlndus al Esgineeine Chemical Research
3r:1665-1679.
t6l Kresla.J.V.,Marlin. T.E.. and Maccregor,J.F. 1994
Developmentof tnferentialProcessModels Using PLS
Conputers& Chenical EngineerineIAQ\I591 -6t 1'
fll
''
ISBN:983-243-15-5
[7] Dayal, 8.S., and Maccregor, J.F. 1996. Recursive
ExponentiallyWeightedPLS and Its Applicationsto
Adaptive Control and Prediction.Jaunal of Process
Contrc 7(3'):169"179.
I
S , afldHashimoto,
[8] Kano,M., Miyazaki,K., Hasebe.
2000. Inferential Control System of Destillation
Compositions Using Dynamic Partiai Least Squares
Re$ession.Journal of ProcessContro 10:15'l'166.
t9l Qin, S.J., and McAvoy, T.J 1992. NonlinearPLS
modellirg Using Neural Networks. conp te^ and
Chen ical Ensineer i ns 16(4):319 -39t.
tlol Baffi. G., Martin, E.B., and Moris, AJ. 1999
Nonlinear Projection to Latent StructuresRevisited
(the Network PLS Algofithm). Comp terc and
Chemical Eneineer ing 23.1293- 1301.
llll Adebiyi, o.A., and Conipio, A.B 2003 Dynamic
Neural Networks Panial L€ast Squares(DNNPLS)
Id€n.ification of Multivariable ProcessesCanPrrelr
and ChemicaLEn|inee ng 27 tl43-155.
In Encyclopedia
[t2] wold, H. 1985.FartialLeastSquares.
of StatisticalSciences.vol 6. 584"591.New Yorkl
witey.
'787