CALIFORNIA STATE UNIVERSITY, NORTHRIDGE
advertisement

CALIFORNIA STATE UNIVERSITY, NORTHRIDGE
PHASE-ONLY ADAPTIVE NULLING
WITH DISCRETE VALUES
A thesis submitted in partial satisfaction of the
requirements for the degree of Master of Science in
Engineering
by
Elise Tina Oestreich
August, 1979
~\
The Thesis of Elise Tina Oestreich is approved:
California State University, Northridge
ii
'
ACKNOWLEDGMENT
The author wishes to thank Dr. Ephraim Mendelovicz for suggesting
the topic for this thesis and for his continuing encouragement and
guidance.
iii
TABLE OF CONTENTS
Page
LIST OF FIGURES
vi
LIST OF TABLES
vii
ABSTRACT • .
viii
Chapter 1 -
INTRODUCTION
1
1.1
Background and Problem Statement .
1
1.2
Array, Signal and Noise Models .
2
1.3
Derivation of the Signal to Interference Plus
Noise Ratio (SIR) for the Fully Adaptive Array
6
Derivation of the Optimum Weight Vector for the
Fully Adaptive Array . . . . . . . . . . . . . .
9
1.4
1.5
The Maximum SIR for an ESA with Discrete Phases
11
1.6
Thesis Outline. . .
13
Chapter 2 -
BRANCH AND BOUND
14
2 .1
Introduction to Branch and Bound .
14
2.2
SIR Maximization for the ESA with Discrete Phases
15
2.3
Tree Structure
16
2.4
A Fundamental Mathematical Relation
19
2.5
Fathoming
20
2.6
Updating the Current Lower Bound •.
21
Chapter 3 -
COMPUTER PROGRAM DESCRIPTION .
22
3.1
Introduction to the Computer Program .•
22
3.2
Fully Adaptive Array Processing
24
3. 2.1
MWQ . .
25
3.2.2
SIRCLB
29
3.3
ESA Processing -
Pre-Branch and Bound (SIRCLB)
iv
29
Page
3.4
Branch and Bound:
ment Priority . .
Discrete Weights and Assign-
3.5
Branch and Bound:
Loop Processing
3.6
ARFACT and APLOT
47
3.7
Trench-Zohar Complex Toeplitz Matrix Inversion
Subroutine
47
Chapter 4 -
35
40
RESULTS
48
4.1
Introduction
48
4.2
Results for Four Element Arrays
48
4.3
Results for Eight Element Arrays
55
4.4
Problems with Algorithm .
59
Chapter 5 -
CONCLUSIONS AND FUTURE IVORK
63
67
REFERENCES
APPENDICES
68
A.
MAXIMIZATION OF THE SIGNAL TO INTERFERENCE RATIO· ·
B.
MAXIMUM SIR FOR A PARTIALLY CONSTRAINED WEIGHT VECTOR 77
c.
COMPUTER PROGRAM LISTING
v
84
LIST OF FIGURES
Page
1.1
Coherent Combiner for K Channels
3
1.2
Signal Arriving in the Direction 8
from Broadside · · · • ·
·
~ ·
4
2.1
Tree Structure for Branch and Bound
17
3.1
Block Diagram for the Computer Program
23
3.2
Interference Covariance Matrix
27
3.3
Flowchart for SIRCLB ESA Processing •
30
3.4
Flowchart for WEIGHT Subroutine, p. 1
32
Flowchart for WEIGHT Subroutine, p. 2
33
3.5
Flowchart for Branch and Bound
36
3.6
Complex Plane Representation of Discrete Set
(NBITS = 3) .
· · · . . .
. . . . . .
41
....
50
4.1
Adapting Patterns with Jammer in Main Beam,
.
ESA with 3 Bit Phase Shifters
4.2
Adapting Patterns with Jammer in First Sidelobe,
ESA with 3 Bit Phase Shifters
4.3
Antenna Patterns with Jammer in Second Sidelobe,
ESA with 3 Bit Phase Shifters
4.4
Comparison of Adapting Patterns with Jammer
in Main Beam, ESA with 3 Bit Phase Shifters vs.
4 Bit Phase Shifters · · · · · ·
53
4.5
Patterns for Eight Element Linear Array
60
5.1
Approximate Branch and Bound Search . • ·
66
.
.
.
vi
.
.
... ...
......
..
...
51
52
LIST OF TABLES
Page
4.1
Signal to (Noise Pluse Interference) Ratios (dB),
Jammer in 3 Different Positions . . . . • .
54
4.2
Signal to (Noise Plus Interference) Ratios, dB
56
4.3
Difference Between Adapted and Quiescent Patterns
in Direction of Interference, dB · · · · • . · .
57
Difference Between Adapted and Quiescent Patterns
in Direction of Signal, dB . • . . . . . . . . .
58
4.4
vii
ABSTRACT
PHASE-ONLY ADAPTIVE NULLING
WITH DISCRETE VALUES
by
Elise Tina Oestreich
Master of Science in Engineering
In this thesis a method, using a branch and bound algorithm, is
described for obtaining optimal phase settings for jammer cancellation with an electronically scanning array (ESA) whose only variable
parameters are element phases which vary in discrete steps.
For the purpose of this study it is assumed that the interference
environment is known.
Therefore, no estimation of environmental noise
input will be required.
The signal to interference plus noise ratio (SIR) for a linear
array with an adaptive complex element weight vector was given in the
literature.
In particular the optimum weight vector that maximizes
the SIR when the weights are unconstrained has been derived.
This solution is not valid when the values allowed for the
components of the weight vector are restricted to a discrete set.
In
particular, in an ESA the only values available are those with constant
viii
magnitude and discrete phases determined by the number of phase shifter
bits.
Methods of continuous analysis cannot produce a result for this
discrete problem and an exhaustive search is impractical in most
circumstances.
In contrast to the exhaustive search method, the branch and bound
technique needs to examine only a small subset of all possible discrete weight vectors in order to arrive at the best SIR.
The method
has been tested and the jammer cancellation results in the test cases
have been encouraging.
As a minimum, the approach described provides upper bounds for
adaptation performance for electronically scanned arrays that are
controlled with digital phase shifters.
Chapter 1
INTRODUCTION
1.1
Background and Problem Statement
Radar and communication systems must be designed to cope with
directional interference, intentional and unintentional, in order to
fill the needs of users.
This requirement has led to increasing
interest in adaptive antenna techniques which can sense and respond
to a time-varying environment.
Adaptive arrays have the capacity to
null the reception from particular directions and thereby eliminate
undesirable signals.
An adaptive array can be implemented by asso-
ciating a coherent receiver channel with each array element.
The
complex gain of the receiver is equivalent to a complex weight.
This
weight has magnitude and phase that vary over a continuous range of
values.
Adaptive arrays are over-equipped to handle electronic scan-
ning since all that is required for that function is variable phase
shifters.
In many applications electronic scanning is necessary,
while adaptive nulling capability is a desirable option, often left
out, due to its high cost.
Using phase control only reduces this cost
and provides the electronic scan function.
In addition it should pro-
vide an acceptable degree of nulling adaptivity.
Arrays having phase
control only are typically called electronically scanned arrays (ESA) .
This thesis provides a way to find the best adaptive nulling perf omance for an ESA with phases that vary in discrete steps.
Herein the term "fully adaptive array" is reserved for arrays
with element weights that can vary continuously in magnitude and phase
such as those analyzed by Widrow [1] and Applebaum [2] .
1
2
1.2
Array, Signal and Noise Models
The signal and noise environment can be represented by a coherent
combiner as shown in Figure 1.1.
All desirable signals are narrowband
and the noise is a narrowband, stationary process, which is additive
and Gaussian with zero mean and unit variance.
The interferences are
also narrowband, zero mean stationary processes which are additive and
Gaussian.
Signals, noise and interference are represented by complex
envelopes.
The desired input signal waveform modeled as a planar wave is
represented in Figure 1.2.
The horizontal line along the bottom of
the drawing depicts a linear array with K elements.
signal arrives at an angle 8
s
from broadside.
The incoming
In this linear array it
is assumed that the elements are equally spaced by a distance
A
d =
(1.1)
2
where A is the wavelength.
This value insures that there will be no
grating lobes for any scanning angle es.
The equation for the signal
th
in the k-- array element is given by
-j
2Tikd
---A- sin 6 8
(1.2)
Given that n. and n. are the noise and interference components
~
J
from two channels i and j the covariance of n. and n. is given by
~
J
(1.3)
where
*
represents complex conjugate.
3
s,
•
•
•
Figure 1.1. Coherent Combiner forK Channels
4
f.-~
0
--..~oo-~-1·-- ~ ~
2
•
•
•
(K-11
Figure 1.2. Signal Arriving in the Direction e s from Broadside
5
It follows that
m ..
J1
= E{ n.J* n.}
1
E{n. n~} = m~.
=
1
J
(1.4)
1J
Thus, the covariance matrix
6.
M = (m .. ]
-
is Hermitian.
(1. 5)
1J
The power in the ith channel is given by
m .. =
11
E{n~ n.} =
1
jn.j
1
1
2
(1. 6)
Note that the covariance matrix is made up of two components
M = M.
-1
+ --n
M
(1. 7)
where --J_
M. represents the covariance matrix due to interference alone
and M denotes the covariance matrix for noise alone,
--n
where
(1.8)
M
--n
with
~
6. identity matrix of order K
and
p
6.
=thermal noise power in each array element.
n
The derivation of the covariance matrix M. is shown next.
-J..
The
voltage due to interference i in element k is shown in Equation 1.9.
=v.e
1
2'!Tkd
-j - , 1\
.
S1n
8.
1
-"kS i
= v .e J
1
(1. 9)
6
where
(1.10)
th
th
The interference covariance of the k-- and t-- array elements is
given by
=e
j(k-9.)13.
= p e
1
J.
j(k-9.)13.1
(1.11)
The interference covariance matrix may now be given as
M.
-J_
=
j (k-9.)13 J.~
[ p.J. e
(1.12)
6.
where p. =interference power in each array element.
J.
For the purpose of this study it is assumed that the interference covariance is given and unchanging so that no estimation of the
interference environment such as interference power(s) and direction(s)
are required.
When there are multiple jammers, the interference
covariance matrix elements are of the form of a summation of elements
~
described in Equation 1.12.
1.3
Derivation of Signal to Interference Plus Noise Ratio (SIR)
for the Fully Adaptive Array
In this section, it will be shown that the signal to interference
7
plus noise ratio (SIR) is given by
lwt w*lz
~
~q
SIR=----
wtM w
(1.13)
where t represents transpose, t is the conjugate transpose, and
w=
=
adaptive complex array weight vector
(1.14)
w =
=
unadapted (quiescent) weight vector
representing the optimum compromise
between such performance factors as
resolution, gain, and low sidelobes
(1.15)
~q
In order to derive Equation 1.13 it should be noted that the
signal output from the combiner (Figure 1.1) is a real scalar value.
K
v
s
=
L:
(1.16)
In vector notation it is given as
v
~
s
(1.17)
was modeled as a planar waveform and is completely defined when the
direction 8
s
is given.
8
In order to maximize v
s
in Equation 1.17 it is sufficient to set
w = s*
(1.18)
~q
so that all the voltages in the array elements add up coherently.
When Equation 1.18 is satisfied, the array illumination is uniform
with the attendant high sidelobes.
The signal power can now be obtained from Equations 1.17 and
1.18 as
p
s
=
(1.19)
The noise output may be expressed as the scalar value
v
(1. 20)
n
where
N
=
= noise and interference vector
The expected noise power· can be represented by
=
=
9
Since the expectation operator only operates on the random noise terms,
p
n
or
p
(1. 21)
n
where
(1. 22)
Therefore, the ratio of the signal power to the noise (plus
interference) power is given by
p
SIR=
s
p
]wt w*]2
=
n
1.4
-
wt
-q
M w
(1.13)
Derivation of the Optimum Weight Vector for the Fully
Adaptive Array
The corresponding optimum weight vector which maximizes the SIR
is given in this section but its derivation is deferred to Appendix A.
This result is due to Applebaum [2].
However, the proof given in the
appendix follows other authors.
The optimum weight vector that maximizes Equation 1.13 is given by
(1. 23)
The numerator in Equation 1.13 is shown in the
appendL~
to be a
quadratic form,
(1. 24)
10
with
Similarly, the denominator of Equation 1.13 is a quadratic form.
Since M is the covariance matrix for a stationary random process, the
denominator is positive definite.
The equation for the signal to
interference ratio is now given by the ratio of quadratic forms
SIR = - - - ' - wt M w
(1. 25)
Therefore the following theorem from Gantmacher [8] can be used.
Theorem:
Given Hermitian matrices C and D of order n x n with D
positive definite, the equation
1£- >..nl
=
o
has in general n distinct values for A (eigenvalues).
Then:
The largest characteristic value A
n
is the maximum of the ratio
of two quadratic forms and is given by
wt c w
A
n
= max ~----------
and this maximum is assumed only for the eigenvector
~
associated with
the characteristic value A which satisfies the following homogeneous
n
equation
11
c w=
A. n D
W
~
Applying this theorem to Equation 1.25, it is shown in Appendix A
that
a)
The largest eigenvalue
~
of the linear combination
! -.AM is
its only nonzero value and is given by
=
b)
Thus
~
W M-l W
-q -q
The eigenvector corresponding to .AM is
provides the maximum obtainable SIR for the array and
~M
is the
excitation required to achieve it.
1.5
The Maximum SIR for an ESA with Discrete Phases
The solution given in the previous section is not valid when the
values allowed for the components of Ware restricted to a discrete set.
In particular, in an ESA the only available values are
l
ej21f(k-l)/L
l
_
_ b
, k-1, .•. , L-2 ~
where b is fue number of phase shifter bits.
Methods of continuous analysis cannot produce a result for this
discrete problem.
stances.
An exhaustive search is impractical in most circum-
To demonstrate this, the total computational count will now
be derived.
Note that there will be LN points to be considered where
N is the number of array elements.
The computational count for the
12
SIR is obtained as follows.
From Equation 1.13
jwt w*l2
SIR =
-q
-
(1.13)
wtM w
N + 1 multiplications are required to calculate the numerator,
assuming that Wand W are N-dimensional.
-q
2
N + N multiplications are performed in calculating the denominator, assuming that M is N X N.
This results in the following number
of complex multiplications required each time the SIR is calculated
2
N + 2N + 1
~
2
N
(1. 26)
This can be approximated by 4N
2
real multiplications.
Searching for the optimum weight vector by exhaustion amounts to
calculating the SIR for LN cases with a total real operational count of
(1. 27)
For example, consider a small array with 16 elements and 4-bit phase
shifters.
Then there are
4(16)
16
(16)
real multiplications.
2
= 1.89
X
10
22
Assuming optimistically that one nanosecond is
required for each multiplication, using the exhaustive search method
would take
1.89
X
10
3600
X
24
22
X
X
10
365
-9
=
600,000 years
13
to complete.
An efficient search algorithm suitable for this problem is known
as branch and bound.
This method reduces the number of points in the
search space and still leads to a proven solution.
This procedure has
been used to obtain the results in this thesis.
1.6
Thesis Outline
The branch and bound algorithm is described in Chapter 2.
Chapter 3 provides a description of the computer program used to
implement the branch and bound algorithm and generate numerical results.
A functional block diagram is presented as well as flowcharts for the
main processing and subroutines.
Included in the descriptions are the
branching rule and the Trench-Zohar Toeplitz matrix inversion method.
In addition, a program listing is provided in Appendix C.
Chapter 4 contains the numerical results generated by the computer
program.
The branch and bound program has been used to evaluate four
and eight element linear arrays with element spacing A/2.
Results
have been obtained for arrays with 2 to 4 bit phase shifters.
An
untapered array illumination is assumed for the unadapted pattern
since sidelobe control in the unadapted pattern is not essential to
demonstrate the adaptation capacity of the ESA.
One source of
interference was stationed in different angular positions and the
nulling capacities of the arrays were determined.
The thesis concludes with Chapter 5 in which the conclusions
derived from this study are summarized and suggestions for future work
are made.
Chapter 2
BRANCH AND BOUND
2.1
Introduction to Branch and Bound
The need for an efficient search algorithm suitable for obtaining
the maximum signal to interference ratio (SIR) for a linear array with
complex element weight vector
~
whose components are restricted to a
discrete set was demonstrated in the previous chapter.
It was shown
that for a small 16 element array with 4 bit phase shifters, 600,000
years would be required to exhaustively search all cases on a digital
computer.
The branch and bound algorithm is an efficient search technique
which reduces the number of points in the search space and still leads
to a proven solution in a realistic length of time.
The version used
to obtain the results of this thesis is described by Cohen [3].
Cohen
considers clutter suppression in relation to the determination of
transmitter coherent pulse train amplitudes.
That problem is cast in
identical mathematics as the problem at hand.
In the array problem N
dimensional complex formulation was chosen over 2N dimensional real
formulation.
Complex formulation preserves the Toeplitz form of the
covariance matrices allowing the use of faster inversion algorithms
(Trench-Zohar [4], [5]).
chosen.
For this reason complex formulation was
This differs from Cohen's implementation and brought about a
different branching rule as well as the need to use mathematical results and extensions thereof from Spafford [6].
Spafford gives the
optimum subvector of weights over the continuum when the rest of the
weight vector has been constrained to the allowed discrete values. This
14
15
result is essential in the use of the branch and bound algorithm.
2.2
SIR Maximization for
fue ESA with Discrete Phases
In Chapter 1 it was shown that the equation for the signal to
interference ratio for a fully adaptive array is given by
SIR(W) ==
Jwt
w*J
~
~q
2
(2.1)
wt M w
For an ESA the elements of the weight vector W are constrained to the
discrete set
(2. 2)
where b is the number of phase shifter bits.
He wish to find the maximum signal to interference ratio for an
ESA using the branch and bound algorithm.
Mathematically this can be
formulated as follows.
Find:
Max
SIR(W),
(2.3)
w EA
m
with m == 1,2, ... , N
For the fully adaptive array the weight vector W has elements
which are unconstrained.
in magnitude and phase.
The ESA has weights that are constrained both
The intermediate cases in which some elements
of the weight vector are constrained is used in the branch and bound
algorithm.
The specific notation for the partition of the ~order
weight vector W into its constrained and unconstrained parts is given by
16
where
w~
=
(W~
-c
w~
-c
=
(wl, w2' ••• '
w~
=
(w 9.+1' ... ' wN)
-u
W~)
-u
(2. 4)
WQ, )
=
constrained subvector
of weights
=
unconstrained subvector
of weights
=
level indicator
~
= 0,
N
= number of linear array elements
1, 2' ... ' N
Further explanation of this notation will follow in the description of
tree structures used in the branch and bound method.
Equation 2.1 can now be restated as follows for the partially
constrained weight vector
l<~~t'
w2-t) w*lz
-q
-u
cw£t
-c
w£t) M (W£
~u
- -c '
SIR (W) =
2.3
(2.5)
~~)
Tree Structure
Equation 2.5 is used with the branch and bound algorithm for a
variety of possible values for
~
and for each £, different weight
values are assigned from the set A.
Since any combination of 9- values
and weight values may be needed, a complete enumeration of all possibilities is required.
All such combinations can be visualized with the
aid of a tree structure shown in Figure 2.1.
Equation 2.4 that the level indicator
Referring to Figure 2.1, £
=0
Q,
It was mentioned in
varies between 0 and N.
refers to the top node of the tree.
At this node the SIR is given for the totally unconstrained Nth order
17
NODE
I
=1
L
•
•
•
••
•
=N
SIR
"'~---nr~~~==---.~~
\'!Y~
L
Figure 2.1 Tree Structure for Branch and Bound
18
weight vector by Equation 2.1.
level is denoted by
~
= 1.
Continuing down the tree, the next
The SIR is now a function of the partially
1
constrained weight vector w and is given below.
1
In this case the SIR (W , ~) is given by Equation 2.5.
-c
-u
level the SIR is denoted by
th
At the k-
~)
SIR (Wk
-c ' -u
where
wk
-c
=
(wl, w2' ..• ' wk)
wk
-u
=
(wk+l' · · ·' wN)
The next level down is denoted by k+l and the following method is used
st
for constraining the (k+l)- element of w k+l.
-c
w k+l
-c
=
(~
=
(Wk
-C
wk+l =
a2)
=
(Wk
-c
wk+l =
aL)
-c ' wk+l =
al)
or
w k+l
-C
or
w k+l
-c
Note that each node branches to L values for the next level in the
tree.
The unconstrained subvector changes in the following manner.
At the kth level the vector is
19
=
st
Constraining the (k+l)-- element to ak, yields
~~+l
Level
~=N
(wk+ , ... , wN) of order N-k-1.
2
=
denotes the bottom of the tree.
The SIR only depends upon
the fully constrained vector of weights and is denoted by
SIR (vfJ)
~c
In summary, at the top of the tree all of the elements in the
weight vector are unconstrained.
At each level down in the tree
another element of the weight vector is constrained to a member of the
discrete set A of allowable weight values.
At the bottom of the tree,
all of the elements of the weight vector are constrained to elements
in the allowable discrete set.
2.4
A Fundamental Mathematical Relation
The following relation is the central concept of the branch and
bound method as presented here.
It provides the justification for
decreasing the number of points in the search space for the maximum
Note that for two sets rl"CD'
max f (y) > max f (y)
ye:Q'
ye:Q"
This ;is due to the fact that
fewer elements than
(2.6)
Q'.
Q"
is contained within
Q'
and fll! has
SI~
20
The inequality given in Equation 2.6 can be translated into tree
notation as shown below.
e:C
SIR(WQ,+l
max
-c '
WQ,+l e:CN-Q,-1
N-Q,
(2. 7)
-u
where CN-Q,
= N-Q,
dimensional complex space
N-Q,-1
C
= N-Q,-1 dimensional complex space
and
2.5
cN-Q,-1 cc N-Q,
Fathoming
The SIR is evaluated at the bottom of the tree when all elements
of the weight vector have been constrained to values from the discrete
set.
The SIR, a ratio of quadratic forms, takes on real non-negative
values.
Let SIR
1 = c1 , where
~ )
components are in A and
c1
~l
is a vector such that all of its
is a real constant.
This constitutes a
feasible solution to the problem stated in Equation 2.3.
Note that
c1
is actually a current lower bound (CLB) to the solution.
Tracing the way down the tree, at a particular node the following
inequality may hold.
1.
1
The specific equation used to calculate the maximum SIR for the
partially constrained weight vector is derived analytically in
Appendix B. Due to its complexity the equation and pertaining
notation will not be presented here in order to avoid loss of
continuity.
21
If this occurs, that node cannot lead to a feasible solution and it is
declared fathomed.
All succeeding nodes branching out below the fa-
thorned node are automatically fathomed as well because of Equation 2.7.
2.6
Updating the Current Lower Bound
In the event that a node is not fathomed during the search through
the tree and the bottom of the tree is reached, the SIR is calculated.
If
then set SIR=
c2 .
This procedure is called updating the current lower
bound for the maximum SIR.
After this substitution occurs, the algo-
rithm moves from the Nth level to level N-1.
SIR for the next node at the ~level.
It will then find the
After all nodes at the~
level branching from the same node at level N-1 have been exhausted,
the algorithm will move back to level N-2.
It will then proceed to all
nodes at level N-1 that branch from the same node at level N-2.
I;t
should be noted that when
1 < R. < N-1
the maximum SIR is calculated at each node using the equation in
Appendix B, and it is this value which is compared to the current
lower bound for fathoming.
This process of tracing branches continues all the way back to the
top of the tree.
After all nodes have been exhausted in this manner,
the current lower bound is the desired solution and the corresponding
weight vee tor is W
~opt
.
Chapter 3
COMPUTER PROGRAM DESCRIPTION
3.1
Introduction to the Computer Program
This chapter describes the computer program implementation of
the equations given in Chapter 1 for the fully adaptive array and the
branch and bound algorithm described in the previous chapter for the
ESA.
A functional block diagram for the computer program is given in
Figure 3 .1.
The program first calculates the noise and interference covariance matrix M, assuming that the jammer(s) power(s) and direction(s)
are known and unchanging.
It then calculates the quiescent or un-
adapted weight vector W which is determined when the mainbeam pointing
~q
direction is specified.
With these two quantities the value for the
maximum SIR for the fully adaptive array and the corresponding optimum
weight vector are easily obtained from the equations given in Chapter 1.
2
jwt w*l
=
SIR
max
~
~g,
wt
MW
(3 .1)
where
w= w
~opt
=
M- 1w
~q
(3.2)
The value for the maximum SIR is not used in the branch and bound
algorithm since it represents the best performance for a fully adaptive
array with weights having continuously varying magnitudes and phases.
However, it is used to determine the relative performance of an ESA as
22
23
FULLY ADAPTIVE
PROCESSING
MWO
I
SIRCLB
ESA PROCESSING
PRE-BRANCH AND BOUND
-·I
SIRCLB
-I
BRANCH AND
BOUND
I
A A FACT
I
APLOT
Figure 3.1 Block Diagram for the Computer Program
24
the number of phase shifters bits increases.
The ESA portion of the program begins with the third block in
Figure 3.1.
This part of the program uses a random number generator
to select all of the discrete elements of the weight vector.
Then the
SIR is calculated using Equation 3.1 without using Equation 3.2.
Many
possible weight vectors are generated with the random number generator
and the corresponding SIRs are compared to obtain the largest.
value is stored as the current lower bound.
This
This process enables the
branch and bound algorithm to converge more rapidly to the desired
maximum SIR.
The next block represents the branch and bound algorithm.
theoretical concepts were introduced in Chapter 2.
The
A more detailed
description follows in Section 3.4.
The antenna patterns for the unadapted, fully adaptive and ESA
are then plotted to determine jammer cancellation results.
More
accurate quantitative results are derived and tabulated from additional printed output.
The description of the high level structure of the computer program was given above; the next sections will give detailed descriptions of the computer algorithms.
3.2
Fully Adaptive Array Processing
The fully adaptive array processing includes two subroutines:
MWQ which calculates the noise and interference covariance matrix M and
the quiescent weight vector W and SIRCLB in which the maximum SIR for
-q
the fully adaptive array and the corresponding weight vector W t are
-op
determined. The following subsections will discuss each of these
25
routines in greater detail.
3.2.1
MWQ
It was shown in Chapter 1 that the noise plus interference
covariance matrix is given by
+M
--n
M = M.
~
where
M. represents the covariance matrix due
~
to interference alone and
M denotes the covariance matrix for the
--n
noise alone,
where
with
~
=
identity matrix of order k
pn
=
thermal noise power in each
and
array element.
The interference covariance matrix is given as
~=
[ pi
e j(k-£)(3.]
l.
(3 .3)
26
where
pi =
k,
n
N
e.1
=
interference power in each array element
are the kth and Nnth c hanne1 , respect1ve
· 1y
direction of the interference
For the case of multiple jammers the interference covariance matrix is
given as a sum of terms similar to the right side of Equation 3.3.
For the interference covariance in Equation 3.3 whenever
m, where m is a fixed integer, we obtain identical elements.
(k-~)
=
In each
successive row, one column over to the right, the element value is
repeated as shown in Figure 3.2 for N=4 elements.
Thus all diagonals
parallel to the main diagonal have identical elements.
is called a Toeplitz matrix.
This structure
Note also that the elements on opposite
sides of the main diagonal are complex conjugates.
matrix is Hermitian and Toeplitz.
If
~
Therefore, this
= 1, the following formulation
is. used to ohtain the elements in the first row of Equation 3.3.
(3.4)
Then the Toeplitz property is used to find the elements on the main
diagonal and in the upper triangular portion of the matrix.
Finally,
th.e Hermitian property is used to fill the lower triangular portion.
The total noise plus interference covariance matrix is now
obtained by adding the noise power p
n
to the main diagonal elements of
I
27
P. • 1
P. ~/3i
P. ei213 i
P. e-i/3 i
pi ·1
P. ei/3 i
P. ~ 2 13i
P. e-i/3 i
P.I • 1
P. ~/3i
P. e-i/3 i
pi. 1
I
I
I
P. e-i 2 13 i
I
p
.e
I
I
-j3/3.
1
P. e-i 2 13 i
I
I
I
I
p
j8
i3/3.
I
I
I
Fi;;ure 3.2 Interference Covariance Matrix
'
28
the interference covariance matrix.
The quiescent or unadapted weight vector which is the optimum
compromise between resolution, gain and low sidelobes is calculated
from the signal direction angle 8
as shown in the following equations:
s
= quiescent
weight vector
where the kth element is denoted by
= ak e
-j (k-1)
B
s
and
2IId
A
sin
e
s
where
d
=
A=
es =
distance between elements
wavelength
desired signal direction angle
For this study an untapered array illumination is assumed for the
unadapted pattern since sidelobe control in the unadapted pattern is
not essential to demonstrate the adaptation capacity of the fully
adaptive array or the ESA.
Therefore,
=1
- - -
~-------
29
3.2.2
SIRCLB
The maximum SIR for the fully adaptive array and the correspond-
ing optimum weight vector are calculated using the following equations
from Chapter 1.
wt w wt w
SIR
max
=
-q -q -
(3.5)
=
wt
w
M
wt
M
w
where
w = w
-opt
(3 .6)
=
Substituting Equation 3.6 into Equation 3.5 we obtain the following
formula for the maximum SIR.
wt M- 1 w wt M- 1 w
SIR
max
=
-q -
~q
-q -
-q
wt
M-l M M-l W
-q-q
w
= wt
-q -opt
3.3
ESA Processing --Pre-Branch and Bound (SIRCLB)
In addition to obtaining the maximum SIR and the corresponding
optimum weight vector for the fully adaptive array, the SIRCLB routine
represented in Figure 3.3, performs another function, for the ESA
which is described next.
The largest current lower bound for the maximum SIR for an ESA
30
Wclb = 0.0
I= 0
1=1+1
WEIGHT
w
wtw• 12
l
SIR=----
-q
'e{ t M '!Y
N
1/lclb =SIR
't!clb = '!t,
N
Figure 3.3 Flowchart for SIRCLB ESA Processing
31
where all weights are constrained to discrete complex values is
calculated in SIRCLB.
This situation corresponds to a feasible solu-
tion for the maximum SIR at the bottom of the tree for an ESA as
described in Chapter 2.
The discrete weight vector is calculated in a subroutine named
WEIGHT which is called from SIRCLB.
The following processing occurs in the WEIGHT subroutine as shown
in Figure 3.4.
First a sequence of N random numbers is generated and
written into a vector R of order N where
R =
Then each element of the weight vector W is assigned a value based on
the entries in R using the following inequality.
< r
If
-
Ll
<-
k-
2
b
where
L
1
=
1,2, ... , L
b
=
number of phase shifter bits, and
rk =
th
~
= zb
entry in R E [0,1)
(3. 7)
32
RANDOM
NUMBER
GENERATOR
k
= k+1
N
Fi.:;ure 3.4 Flowchart for Weight Subroutine, p. 1
33
N
y
RETURN
Figure 3.4 Flowchart for Weight Subroutine, p. 2
f
34
th
Then the k-- element in the weight vector
w is
given by
wk = a k ejSk
(3.8)
where
ak = 1
=
sk
-2'TT(1 )
1
2b
Equation 3.7 assigns a value to 1
varies from 0 to 1.
1
based on the value of rk, which
This value for 1
1
is used in Equation 3.8 to
determine the discrete phase for the weight vector.
After the N
elements of W have been chosen in this manner, the subroutine returns
to SIRC1B.
After the program has returned to ·the SIRC1B routine the SIR is
calculated using the weight vector W computed in the WEIGHT subroutine
and the following equation:
SIR
=
lwt w*l
~
,_.q
wt
M
2
w
The SIR is always positive since the denominator is positive definite.
This value is compared to the value for the current lower bound for the
maximum SIR,
~clb'
which is initialized to 0.
for SIR is stored in
~clb
and the weight
If SIR
vector~
>~clb'
the value
is stored in
~clb"
The SIRC1B routine processes 2,000 weight vectors in this manner.
The number 2,000 was selected because this should constitute a sufficient statistical sample.
After this processing is concluded, control
'
35
returns to the MAIN program where the branch and bound logic is
implemented.
3.4
Branch and Bound:
Discrete Weights and Assignment Priority
The flowchart for the computer program implementing the branch
and bound concepts described in Chapter 2 is shown in Figure 3.5.
The largest current lower bound for the maximum SIR is initialized
to
~clb
which is an output from the SIRCLB subroutine.
The branch and
bound program next computes the allowed discrete set of weight values:
A
-mr
=lamrk : amrk
1, 2, ... , MDIM
where NBITS is the number of phase shifter bits.
The index I in the next block of the flowchart corresponds to the
level indicator, L, plus 1.
The reason for this convention is to
avoid an illegal FORTRAN subscript of 0 (level 0, or the top of the
tree).
NPASS keeps track, at a given level L, of which tree branch
of those emanating from one vertex, the program is processing.
shown in Figure 2.1, there
are~ MDL~=
2NBITS branches originating
from a node (vertex) at the previous level.
assigned to NPASS are 1, 2, •.. , MDIM.
~s
Therefore, the values
Since the level indicator Lis
initialized to 0, the initial value for NML
= N-1
is N.
The program now calls two subroutines, ANGLE and RlR2 prior to
constraining the elements in the weight vector to members of the allowable discrete set.
the first level, L
This sequence is performed one level at a time. At
= 1,
the first element in the weight vector is con-
strained; at the second level, the second weight is constrained, etc.
36
INITIALIZATION
BRANCH AND
BOUND
I
SIRclb= VcJb
I
amr =
k
ej ((k-1) 27T/2NBITS)
l
I= 1
NPASS = 1
1
I
NML=N
I
ANGLE
I
RIR2
I
lJ
Figure 3.5 Flowchart for Branch and Bound, p. 1
37
BRANCH AND BOUND
LOOP PROCESSING
1=1+1
.NPASS = 1
1
L = 1- 1
NML = N -L
YES
RIR2
REORDR
ANGLE
SIMA X
Figure 3.5 Flowchart for Branch and Bound, p. 2
38
BOTTOM OF THE TREE
NSIMAX
YES
SIR clb = +max
W
-clb
= B
-cone
Figure 3.5 Flowchart for Branch and Bound, p. 3
39
FATHOM VERTEX
NPASSL =
NPASSL + 1
NPASSL = 1
I= I- 1
L = L- 1
NML = NML + 1
RHIGH
Figure 3.5 Flowchart for Branch and Bound, p. 4
40
In order to select the constrained discrete value, the program calls
subroutine ANGLE which computes the angle, a, in the complex plane
corresponding to the first element in the optimum weight vector W
-opt
using the following formula:
a
=
tan
This value for a a is now used in subroutine RlR2 to select the allowable discrete value for the first element in the weight vector.
vectors,
~IM
~land ~
where
MDL~
2 , are defined in RlR2.
= 2NBITS
~ ,
3
Related vectors
Two
~ ,
4 •.. ,
are determined in another subroutine,
RHIGH, which is described later.
The method of selecting the discrete
weight value is demonstrated with the aid of Figure 3.6, for NBITS
= 3.
Noting that the vector corresponding to angle a intersects the unit
circle at a point denoted by p, which is closest to the discrete value
a , the program will select 2 as the first entry in
2
closest value top is a .
1
point a
in
~
3
1.
Therefore, the first entry in
is the third closest value to p.
3 is 3.
~
The first entry in
~ , ~
4
5 , ... ,
The second
~
2 is 1.
The
Therefore, the first entry
~IM
is determined in the
same manner .
In summary, RlR2 produces the vectors
~
and
~
2 which contain the
first and second closest allowable discrete values to be assigned to
a given weight, and they are indexed by level L in the branch and
bound tree.
3.5
Branch and Bound:
Loop Processing
As described in Chapter 2, the unconstrained portion of theweight
41
IM
Figure 3.6 Complex Plane Representation of Discrete Set (NBITS
=3)
42
vector is of order N-L, while the constrained portion is of order L.
L will take on values from 0 to N, where N is the number of elements
in the weight vector.
Conversely, NML
= N-L
takes on values from N
down to 0.
The vector B
represents the constrained subvector of weights,
~cone
which is indexed by L.
either
~
or
~
The discrete value vector, A
~mr
2 , depending on an indicator.
~l
and
~
, is indexed by
2 are indexed
by level L.
I is compared to
to determine if the processing has reached
N+~
the bottom of the tree.
If not, subroutine REORDR is called.
This
subroutine partitions all of the vectors and the noise and interference
covariance matrix M which are used to calculate the maximum SIR for the
partially cons trained weight vee tor, as shown in Appendix B.
The
following vectors are partitioned and reordered in this context:
ao
~0
=
=
ao
a
~
w
ql
1
L
w
qL
L
(N-L)
=
"unconstrained" portion
L
=
at
"constrained" portion
w
qL+l
tl
=
=
N-L
w
qN
N-L
43
where
w
ql
w
-q
=
=
w
qN
bo
B
quiescent weight vector
N
b
1
=
conc
1
=
=
-o
bo
b
L
conc
L
1
constrained subvector of weights
L
The corresponding partition of the covariance matrix also occurs
in REORDR, as follows:
X 1
M
L
=
[fa]
X
(N-L)
(N-L)
(N-1) x L
X
(N-L)
NxN
where M is the "unconstrained" submatrix.
-c
Note that only the constrained subvector of weights
being constrained to discrete values.
and
~
~O
The partitioning of
is actually
~q
is performed to be compatible in dimensionality with
Similarly the partition of the
~
into
~O
~o·
matrix is also done for this reason.
The maximum SIR for the partially constrained weight vector is
calculated in subroutine SIMAX.
The following intermediate quantities
are used in the computer program to evaluate the equations derived in
Appendix B.
44
u
=
v
=
-1
M
~
-c
M -l C
.:::.0 ~0
-c
NUMER
=
Bt
DENOM
=
t
~0 ~0
Ci.l
=
-0
(Y B
- -0
-
ct
V)
=o -
~
- V'
~T
NUMER
DENOM
Finally, the maximum SIR is calculated using the next equation.
=
~ ~ + (DENOM)*/a1
SIMAX then returns to the MAIN routine, where the value for
is compared to SIRclb' the current lower bound for the SIR.
is greater than or equal to SIRclb' the node is not fathomed.
If~
~
max
max
As shown
in Chapter 2, Section 2.3, only the first element in the unconstrained
subvector of weights at level L = k is constrained to the (k+l)~
element in the constrained weight subvector at level L
= k+l.
Using
the outputs from SIMAX, the first element in the optimum constrained
weight vector can be obtained using the following formula:
b
opt
=
1
alul - vl
where ul is the first element in
u
vl is the first element in
v
45
The derivation of the equation for b
The value for b
opt
opt
is given in Appendix B.
1
is used, in the branch and bound loop, as the input
1
to the ANGLE subroutine.
The output, a, from ANGLE constitutes the
input to RlR2.
When the ~ level is reached (the bottom row of the tree) and all
elements in the weight vector have been constrained to discrete values,
the current lower bound for the SIR is calculated using a different
formula from that in subroutine SIMAX.
This is accomplished in a
subroutine called NSIMAX, using the following familiar equation:
1/Jmax
=
where
W = B
-cone
=
W
= quiescent
M
= noise
-q
vector of constrained weights
weight vector
and interference covariance matrix
After returning to the MAIN program, a comparison is made to
determine if the current lower bound for the SIR should be updated to
this value for ,~.'+'max'
If so, the corresponding weight vector
~clb
is
set to B
-cone
A vertex is considered to be fathomed if it is at the bottom of
the tree or when the maximum SIR is less than the current lower bound.
The following processing occurs.
'.
·...
46
As described earlier, the values for NPASS are 1, 2, ..• , MDIM
2NBITS.
NPASS
(NPASS
Therefore, at level L, where Lis the index for NPASS,
is incremented by 1.
1
=
1
If some branches are yet to be processed
< MDIM+l) a check is made to determine if NPASS
1
is equal to 2.
If not, subroutine RHIGH is used to obtain the higher priority vectors
3
~ ,
~
4 , ••• ,
~IM·
It should be noted that the following implementa-
tion is used in RHIGH to save storage.
~3'
~5'
~7,
... , R2
+1 + Rl
···- n
-
~2' ~4' ~6' ... , ~2n
where n is an integer.
+R
-2
The fathoming loop closes at the calculation
of B
for the same level L.
-cone
If no branches are left to be processed (NPASS
logic will back up the tree to the previous level.
1
= MDIM+l),
the
This is manifested
in the program by resetting NPASS at level L to 1, decrementing L by 1,
and incrementing NML by 1.
If L is not zero, the top of the tree has
not yet been reached and NPASS is incremented at level L so that a
search of the other branches at that level can continue.
When L is
zero, the top of the tree has been reached and the value for SIRclb
and
~clb
are the solutions for the maximum SIR and the corresponding
discrete optimum weight vector, respectively.
These values are output
at the printer and the antenna patterns for W lb' W t (the continuous
-c
-op
optimum weight vector), and W (the quiescent weight vector) are
-q
plotted.
47
3.6
ARFACT and APLOT
The two routines ARFACT and APLOT compute the array factor and
plot the resulting antenna pattern, respectively.
Since they are used
routinely for antenna applications, the programming details will not
be presented here.
3. 7
Trench-Zohar Complex Toeplitz Hatrix Inversion Subroutine
A subroutine called ZORN * was used to perform all of the complex
Toeplitz matrix inversions in this program.
It takes
~N
2
operations
to invert an N-dimensional complex Toeplitz matrix as compared to the
~N
3
3.8
operations required by the Amdahl SCILIB routine.
Program Listing
A complete listing of the program appears in Appendix C.
*
ZORN was adapted from the real Toeplitz Hatrix Inversion Routine
written by Captain Alan Paige, U.S. Air Force.
Chapter 4
RESULTS
4.1
Introduction
The branch and bound algorithm was tested with four and eight
element arrays, to determine correctness and speed of convergence.
Numerical results were obtained to determine quantitative jammer
cancellation performance.
Some of the cases converged very slowly
and the runs were deliberately interrupted.
obtained were, in many cases, unsatisfactory.
The intermediate results
These problems are
further discussed at the end of the chapter.
An untapered array illumination is assumed for the unadapted
pattern since sidelobe control in the unadapted pattern is not essential to demonstrate the adaptation capacity of the ESA.
4.2
Results for Four Element Arrays
The branch and bound method has been tested for correctness by
comparing its results with those obtained using an exhaustive search
through all possible phase settings.
A four element linear array with
element spacing of A/2 and three bit phase shifters has been used for
this purpose.
The results of the tests showed that the identical dis-
crete optimal weight vectors were output from the branch and bound and
the exhaustive search.
The increased speed of convergence due to fathoming did not
shorten the runs for these smaller cases, since the overhead costs were
significantly higher for the branch and bound program.
Results pertaining to the following special cases are shown.
48
49
Signal angle is always 40° from broadside.
In each of the three
configurations considered there is only one interfering signal 20 dB
above array element thermal noise arriving at 20° (main beam) or -10°
(first sidelobe) or -50° (second sidelobe) from broadside.
Results have been obtained for arrays with 2, 3, and 4 bit phase
shifters.
Antenna patterns are given in Figures 4.1, 4.2 and 4.3 for
all jammer configurations, for the array with 3 bit phase shifters.
One pattern for the array with 4 bit phase shifters is shown in
Figure 4.4.
patterns:
In each of Figures 4.1, 4.2 and 4.3, there are three
(A) unadapted array, (B) adapted discrete or ESA (discrete
adjustable phases, fixed gains) and (C) adapted continuous
(continuously varying phases and magnitudes) .
signal and jammer are indicated by arrows.
The positions of
We note invariably that
both the ESA and the adaptive array are reducing the jamming severity
by placing nulls in the vicinity of the jammer.
As expected, the
performance of (B) is worse than that of (C) as evidenced by less
accurate placement of the jammer nulls, higher sidelobes elsewhere
and more distortions in the main beam.
Nevertheless, the performance
of (B) is good enough to be of practical importance.
In Figure 4.4,
the same jamming case is covered as in Figure 4.1; the patterns displayed are type (C), type (B) 3 bit phase shifters and type (B) 4 bit
phase shifters.
over 3 bits.
Note the improved performance achieved with 4 bits
The array phase settings for the 4 bit phase shifters
were obtained as an intermediate result in an incomplete branch and
bound run.
an increase
More quantitative results of performance improvement with
in
the number of bits is given in Table 4 .1.
One would
50
0
0
rl
('.1
I
I
:s;
I
(S:G)
I!IVS ~I
Cl
Li'l
0
1.0
I
I
0
r--..
1
51
f-
=
I'<"\
0
00
=
f-
::;;:
<:t:
U)
lJ..l
...
L1J
0
I.D
c:o
=
..:...J
LLJ
=
U)
f-
=
u..
(/')
z
=
LLJ
::=::
""--
<
-,
=
f-
:;:::
0
........
U)
Iii
V')
=
§.
a;
0
N
I
52
AOf~PTINCi
fiGURE q,4 COMPfi.RISON OF
0
J~!·if·1ER
PATTERNS \·llTil
ff:GT'
M-r-~-...,
JS~ WLili 3 JTmPJI.~SI_UI!Hl~-~SfiTV};-_~_Bl
l'"·'-·Jf---,;---..-DTT,~~;,:;•jl'1 tti'!lj:!i :nj'·l' 1,1-1: ,: 1·\litl'·l: :.~-,,!.,
'_,I
1.
·j1·-l·•·l· 11 1
'1-- I IIrll.ltr,\
1!' 1!'
~~·I I . ,. 1 •.
~~ ~,
'
1
'!·''t.11-i - , I
I
•,, I·
tf
I'
1
·f
.,.g::::"';'-~·-··
I'I"""''T\i'''Ji'li-t:··
I'
1
•j
... , I '
~--, ••,_-,-....
'
. ""'I:·. I [
l· I ' ' I I r.- ' I'I;,II··~~JN\,1ER,
' ' •,t_-,
.:
': jt,'
l
r-
1:
IN MAIN BEAM,
Pjli\~F SfllfliRSa·---- --·r..-~ ..
,'·
:.r!. ····-1
"'11-~-l;j ·
·l""i"
:·;--·'·
I ·1-·· -~1
.....
~.. !1.,.. l
--~--.Q~ir.L
....,.__•1
l''f."l•~-··---,-1
1 1-, ,., .
t·'Jl
...
l-
:
I
I'·,~ '
:1.14 ' . , .I ,.1\ f.." i I .. 1"·1-tl.'I''-·-rI"'1 i'"l·'-·-, ·.. r,-,:.,'I
, ; I I , ( ,,•,
·~·
(,
.
'
:
;
·
'
"
,
~
:
'it-...:
·
.-~.·
.
I,-·
'
. ·I•
' r·l•r·r
, -Lj --:· • 1-'- l1 : ! · '
..
-, -nt: i.i,. ,· ··· •i·-'
··,,
·'·• ,·,
·:"-/
·-a
[•II,
I
.. ·-\.,~- ,-~--'-t-•~1
~...':..:::_L'-•·
- 10 r,-~---~--~·t - l -----l --~----~-- -·r'--'-~........,...,
~-.
I
i \
f ~- t t '- - - -l t
'-1-i - -·---c-:-TT"-, ·--- ~
-1'1'.,.,!.:1,
'\j
.,:\
:1:' i: Iii'I III I: i I\t
~~I, 1-: ... ·l J·t· ,-j~-ll-1 •t-rl-i-j-L:~
I 'II . ·i!•t,I
I .
T,.
11·1'
':·Nil'
..... \!' I ') ' ''I I' 1·1.1I .~,·J: II,,I I 1·1:
t· I'll.,
1-ljlli 1-1 -1-J-,.;.
·-1I !-;:l.t.;.J
H·
\ !I
~IIJ jill
.,I\ITI·t!-11
-I
'II
'7"'
I
II I A '
~ 'II' I.I.l'1'
' .-f ''\II
I I j r'
' I' I : ' I . t· ..! ~.•
1
:,-·~···-···--,il·:·,
\
:·,·
1
I
l:r·
I··
!,\.
·:!:1!
!1·••-l-tll
rlijl\/.'
.•
...
,;~
,
1
!- [ l
~
I ' , I
II II ' '
I
~---- t
+ ~
~-.
1.. I .
-,-1,:;~
•
.
.,. j
0
rT I •~,-·,·~...
· '
•
I
' ',,
...
l
!
I
j
I
~I
\
I
·-
I
'·I
I
I
I
'
• 1
r-+
"I
1
-~
I
1
•
r
I
1
'
1
.. I
l
I
I
~
I
1 1
/
'
-x- ------- -- ---m- - - -·
• I
I'!'
1
'
I I
II'*'
'
r'
-• I"
·I.
1
•• -
\.
l
\
I''
lm.
I
1-J-,.~
I
I
'
I
;
'
1'
I
\
\t
..
L
I
I
.
'
'
:
'
.
.
. ..
,_
-
.,_,
f'
'I
-
I'-
.._I
,
' ' J
I '
J r '-'I_
-
:\·
\'
L,
I
I
I
I
I
1 '
1
r ,-
'
1 ·-' 1
I
'
,
1·1
' ..
:--~·-,--:
• • ' 1 • ••
-?0
~------,-.,-----------r,- ·----\~-~ --,-·--'
....
I -. ; -. •
I
\-i I . -- __.....,_I , ' -·' --~-~
i ' '
~~
,---~--- ---~
1 '.
~-I
'
'-,1'
,--::I[. 'I;' \i
j t , .. ;:,
•·111'1:
·t:i'l i f,,,,,,SI 1'1/\L'· '·J "--]1, ij.:
,.
. --,- .. !.I '.,;. I' r I : I ' , ' '•..t.
' 1., ! I
II , ,
' ' r II
,, ' I , . .
'
.
,
,.
~l . ' I I ,·, ; ; ; r· : 1 , .. ,' : ., ' . 1 I''
- t!
II' I
' ' II
I
•
I ' I I' I ' ' I
-~-I1-1 I -I ,
1 ! · 1
I ,
- ·!
l
I
,
1 , I
~
1t· . '~
i ,.: 'i ,., '
I; 1"1' ''I' i I . I' I i
').
r I'!
x·1 I I' I,I tl ! I' l I·-til;
t I I' :·f I II- r ·J·' I f ,·! ;i·i-·
'.,I; ·-·I-:'
~- r • '· '_,
•
I
I
I
1I I
ill1
-·{'
1l
•.
-·--J.·--1-1
1
1
• 11 • f-,
---r 1 · 1 1 •
r r I 1•
1-I
•
, ' 1 !
, 1• : •
" i !' I 1
: 'J •
r·< t • . ;
- 30 1"1-1-'
~~
+++-i~·T' _._ - --'-+-'-+---~- wr-T- . ,I -'+
, ....u...
..----n-f-+--1·;-.
·tt:·;-.L~·r;· '-,r-t·-:·',, l,.ti·f·;[/, .. 1\''r\· t,'
t' II''
'l''lll
1.,!, 1 ' , --· ,-,-, --~---<-;---r-.--·
l
1 ,., ' I ;·'·t I' .. 1 I '
• I
IX
. l
'
I' I I
' -1'
I
·I· I
'I' x---,'
" I I .-~ --t--I.:
I
'
I
-.
I
1-t
I •
I
I
-
• ,
'1-
.
'
1-
I
[ '
I
j-l·;;i:l11j·\,l\lit·nl~, /~· 1-1 1 'l .
1- •-
I
I ; I
,
' '
I·
-
I '·- '
1
r
• I
I
: :
-
I
'
I
'
I
I
I
I
'
I
l
1-
1 t
I \ ,
I
'
I
I
I '
I
.,
'
I I :
I
i·
I
:-1
-
l_t
I
I
1 :
I
1
I
I
-
1-
I '
-
'
-
'
-
I
.
·-;
• -
•
-I
•
1
,
.
_,
• -,
:
•
r ;
•
-·
J..
,
I
1 • ·\:· 11 \-~-1!
.''\1
I 1-1-1
r1
i-t
-':.,.li•·:
tr~··I·L.t'·'jki··J•'J
I
:"II· ··1·
/:\1,,1 \ J· -,'·1.-'t
I .
,
I
J
1 1
I
'
I
,I~:~~~~~· r[-~~~. 1·• 1 ~1-tl-hr: 1 1~,.1-•l , ,.
I '
1
I
I
,~.X.ADAPTEDCOi·,TH.UQ.JS
1
1:-f.:.:::;·:-:.!. ;.(;~~~ ·T'i'iV'-'=I'':r... l~~ ;:rlt-lt'l :lmt·l-~~f-[i-:!·~~·Jffil-1·-;~1--: ~·~;~·Jiie·
DISCRET·jt.:·:~~r;.:·
--r · ·
I··:
!
I
-40
,·1·11"
"T/"1
~ ~~-~·-;JI ;-,:' l'lfiiTl-;.. : !'] l-11-,
.-n l:j~--:.:1\
1: II'littl~-I i~'')I'll·
~-~-1-1"· I!,,1111~''+jl• IIi ''It' 1j ~-- r;+~-;:,l;-;
1
·i--t--·;··
j··t-:··-it·--·
-·lrlj~·t··- 1
..J 1· 1 - ,. • '
,.-~-~~-·-·~:r1
1 1.
• -
•
1
I'T''•. 1: i l-1' I I ' I I -1
r:-r
~-f·!~·'111i(-'·ijil-'\:.
H+±+-1:
:~
~-~~
-l 1 t
[i·j
--H-
1
I
'
I
,_\
h-
•
II-
[Hi
tl
'1'1
1
lt-t·•!j-~!
1
.,.
I
,.
' .
~
I
·1! t
,
\I'
·
\·
1
'
I·
-1
-
·It,
1 1
I
,AnAP.TED
IJ
, 1,
•
, • •
,q .BITS'
I:'
--t-'-
•'
...
,
•
1 1 1tml:.,:~
I lj_l' I
-r-1' r·-1--M
-
,
t.:·· .11·1•1.:.
l•jl·j
t1
•
••
•
'
·i i'
'I
., ..
r
,
.. ,
,l,·-~1-··
· 1,.t-·
~
,.l.!'
I"'-
_,...;..AD~PTED'D'ISCRCT'tl-r•·;!
·i
i--:i 11-f;
'3 ..BlT
I
-~·;r-111'1
I ~-\'11'1·\'''
'\·,-·-~
I ·
' 1'·1 '!" · . if"! ...I · · · I'I I.,• ·1·1
I I ' · I 1 1 r 1- ;1 -- \ ' 1· ·r~~-·
,-~1 ·t-:··-~r
.. - · --f'r
f
~
hl\-~i'-, 111,---·,l j·ll1'-:!-\, ·I ·I ., •I
\! 1--1--H-·•-r··;
f-,Jri-L
,,
«'
I·J ,·!-,-'1·1· ,,.!! 1'1
r,
'-1)1'.
.,_t_r
__
,~,:-1
0
' '· r-11 · '
I I I
· · •·•
·1
I T,\-•-1,--r+:,
I ' i ,- ·' 1 .. · r-· • 'I
;: .. :,;_,,,,1,:.1,,1:· ··Ill·,;·1-:1:1
,-1-J-IjJ ..I I, \,l,i'I 1 • 1i!·f:[;;
::·'·1--i-1-1;
-50 --..,
-~-j-t""----- -,.--........... ~~- .... ..J-:.-,n-- · --,..:...1.-1--~n- --n~r-r ~ ~~r;1· ~-___,...!...-'--r
-------- t-1~·---r·),.
1-~-·:·:;--!L,i;
.
,,;1'
lj'r·li\:
li!l.
/r
l·
·
1111':
·~~
.
~~,,
,
'-i'
•
·1'
,_,,·r
..
1.-:-,:
1
'1"1'1 .. ,. '
, ...... , I
'i-·
..
. 1
--,1·.'
I
j , l ·'I I, I•
.I
·I I .I
1~ ....
,~,1
:-,ri-1Tii1 ·.1 1·r'jl:
1'-\jrl· i Jl'i•IL 1 j )1\'-l i
~~
\!11 1\ 11'1·1• j 1-1· 1 !-1- .. t ' i-i- 1-,i\;-,- •-1
'"I;~--· . I I I . ' I r
r
1 -- f I
I t ..
I
I I
I
II· I
- l
I· . i
t- : 11 !-l--t.-1 1·1
!·r t 1 i ·
-trl-,r,lll
--1 ~~-II[' 1 I '-1·1 ~~~~~~~~ I'' t·lr· ·11·11
''1·111 il-1-1 1 I I jl 1,--·(, -\J·J-~ ,_~.,,.
-60 llifjf."r-1~·r-tl_Lr _.: ··r ~~t*~_:_ 1! ~- +hj_.:_r~ I ~~
~_j__ l-_1___1-r' - ·_~J---~~L _l_l_ II !-l i·l- ·-i-t- -''-~ -~~_::.~-' •·· · ··' i 1.: · '· 1'1: · 1' lffi1
I •
l•t 1 :1r
II I,.,
i 1-' I r
I:' 1''1
I··' 1'
i I .1''·1
i1IT' ·-- 1 · ··-· ·
1rl:
.. ~r·:.... ,i:d·l!···l·l---!1]·I l .1t '' J!f•it
,J·j
it-1:
1·j 1-:lli·
'r-,.. ,,,1i
··1 ,J.,: ··1'•
1
., 1-1-I.J- •• I
I
1,
•
•
I
I
-I
t
·I
'
'-1
~ 1 '
I '"!- '
1
1,1,1 ::·-~r~,,~·,J
1
1-fl·· .l .. , .. ,li·I .L,J.rilll·-1'-:r!-.!,
-ll·t
~
~
1!,.:
·-~-~'tl,
1
~·-1,:11,-1.
, 1 .,-i,-1-1.;..
l- -;-• 1-t·l.,- ,. I ·1---1 i I I
f I r :'
If I . I ' I
'
I i ' I I II I I . ' I . I I I I 1
I I' I
"I' I I ' I'
I.,.,.
'•r\'• I,-,'1
ll,_ I I II! I.
II.,t1.. ,,I l·rl'j'll'
,,.I -j·;;-,-h
...
1-i-r
r· ,1--<t,l·•:
I ' It ·-r II ,-'j"l·'-1:
j! \·-}I-1"1 ·t,
t-- 1\II'
~I
'
-'''l'i·•·\
I
t\
I" I
,--"I
~-I I""
-·-··rt•L•,t
.,~--..!1'1''
I
'11'-1''
1·1-ltl·ll
J.1'
·
1
,\\·'·1-t.,.t.,l•lj·•tt·itl.l
·!·1+:-,,-,
-70 tLtlJ::!ili_ ' I I ' 't
-•·r I· 1 '
. t
..
I --r' i 1'1
' I I_ I
,• . ::·ill,·; I_!
tr r.-,·j t . ···-,-,' ... ,
..9
--
~'[·\t'l-r·i
I· "
·-·-· ' ;r•'·r•l
· r· I
•\-...:· ·!-t+[!'~-1,-H.
:
, •
..
1-!
·~·,:
1
• '1
• • •- L -I 1
1
1
1
I
Jt~.ll PJ ~ -l~illfJ~1+ 1 t-~
'
'
l
lt
I
1
1 11I''
1-.- -
-60
J.,,.A
.-r
li·lt:lljJ-111
1
-30
I
t
-40
-20
8<DEGRffS)
0
20
I
1
t-d•-'rl-
:f'' ·
rt
r:--·'
I''.
..
~~ 1JJ/I' II ~ :,!:II.! , r~'~i·l·l{j~~l
I
I
...
I' !:lj'j·l·l''!'i,-jl:'!['
I;
1
t1 1 I,jllll,l,-~ -H tt: i:c:;
11
•lr:'l'II
40
I
1
I
'
60
I
'
'
I
1-
I
Irt
80
LJ1
w
TABLE 4.1
PERFORMANCE IMPROVEMENT IN SIR CDB)
WITH INCREASING NUMBER OF PHASE SHIFTER BITS
8·j
2 BITS
3 BITS
4 BITS
ADAPTIVE
ESA
ESA
ESA
ARRAY
i
I
"
r:oo
L
-5.71
-1.24
3 ,Lb
'"',..
4 ...,_
-10°
-5.78
1.83
3.81
5.77
-50°
4.63
4.63
4.63
5.89
.ub
ln
.(:--
55
expect the ESA performance (in the signal to interference plus noise
sense) to improve as the number of bits increases without reaching the
performance of the adaptive array.
The behavior displayed by the data
in Table 4.1 indicates that there is no definite number of bits where
a performance plateau is reached.
The ability of the ESA to combat
interference is quantitatively described in Tables 4.2, 4.3 and 4.4.
In Table 4.2, the signal to interference plus noise ratio is compared
for a number of situations.
It degrades by 10 to 20 dB for the fixed
array as the environment changes from benign to the presence of one
jammer.
Allowing discrete phase-only adaptation recovers 8 to 17 of
the formerly lost decibels.
Finally, the additional margin required
to meet the performance of the adaptive array is of the order of only
1.5 to 6 decibels.
In Tables 4.3 and 4.4, information is given with
regard to the ability of the ESA and the adaptive array to reject
interference while still accepting the desired signal without appreciable degradation.
The adaptive array reduces the jammer contribu-
tion to the point where operation is thermal noise limited with the
degradation in SNR resulting primarily from the slightly reduced
desirable signal reception concomitant with adaptation.
The ESA helps
reduce the interference by about 20 dB which constitutes a very valuable contribution, but as a net effect, the residual degradation in
SNR comes about both from lesser reception of the desired signal as
well as jammer noise.
4.3
Results for Eight Element Arrays
Many cases were tested using eight element arrays with four bit
phase shifters.
However, they could not reasonably be verified using
IMPROVEMENT IN SIR <DB) DUE TO ADAPTATION
IN THE PRESENCE OF ONE JAMMER
TABLE 4.2
NO JAMMER
O·J
~
ONE JAMMER, SIGNAL AT 40°
ADAPTING
PHft.SES ONLY,
UN ADAPTING
ARRAY
UN ADAPTING
ARRAY
--------1...;
ADAPTING
PHASES AND GAINS,
3 BIT PHASE
SHIFTERS
CONTINUOUS
I
20°
6.02
-14.38
-1.24
4.65
-10°
6.02
- 7.74
1.83
5.77
-50°
6.02
-4.93
--
~----
5.89
4.63
--·-----~----~-----~--
---------------
~--~--------~---
INCOMPLETE SEARCH
FOR 4 BIT PHASE
SHIFTERS
1
20° 1
6.02
1
-14.38
1
3.26
1
1
4.65
...
\.n
0\
TABLE 4.3
JAMMER REJECTION GIVEN AS ADIFFERENCE
BETWEEN ADAPTED AND QUIESCENT PATTERNS <DB)
1--4
ONE JAMMER, SIGNAL AT 40°
to1
I
Oj
ADAPTING,
PHASES ONLY,
ADAPTING,
PHASES AND GAINS,
3 BIT PHASE SHIFTERS
CONTINUOUS
20°
19.87
-10°
22.34
52.09
-500
18.36
52.35
'
39.20
.
INCOMPLETE SEARCH FOR 4 BIT
PHASE SHIFTERS
1
20°
1
3Q.48
1
39.20
1
Ln
.......
TABLE 4.4 SIGNAL DEGRADATION GIVEN AS ADIFFERENCE
BETWEEN ADAPTED AND QUIESCENT PATTERNS CDB)
1...
(}·
J
ONE JAMMER, SIGNAL AT 40°
..
ADAPTING,
PHASES ONLY,
ADAPTING,
PHASES AND GAINS,
3 BIT PHASE SHIFTERS
CONTINUOUS
I
i
iI
I
I
!
I
20°
4.00
2.75
-jQO
3.65
0.51
-50°
0.72
0.25
-
--
-·
~-------
-
i
-----------~----~--~--
INCOMPLETE SEARCH FOR 4
BIT PHASE SHIFTERS
1
20°
[------~.~~-
---I
2.75
J
•
lJ1
00
59
an exhaustive search.
Noting that there are LN points to be con-
sidered (see Section 1.5), where
N is the number of array elements
and N=8, b=4, the search space consists of 16 8 points and for N2 =64
multiplications and additions per point, the computation would last
twenty-four days on an
~~AHL
470/V7.
Therefore, program validation
consisted of running many cases while varying the jammer position and
power.
The antenna patterns were used to obtain quantitative results
on the jammer cancellation performance.
Convergence time was also
measured during this testing procedure.
It is important to note that
none of these cases completely finished executing.
The results were
obtained by using the program in an interactive mode in which the most
recent value for the SIR current lower bound (CLB) was saved and used
to initialize the input for the next run.
In this manner, acceptable
adaptation performance was achieved with the final value for the CLB
very close to the maximum SIR for continuously varying weights
(adapted continuous) •
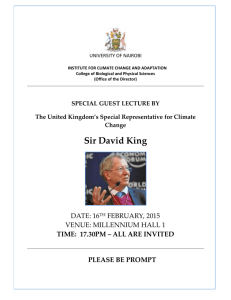
A representative 8 element, 4 bit phase shifter case is shown in
Figure 4.5.
The adapting ESA pattern was obtained in an incomplete
branch 'and bound run.
Note, however, that the CLB (PSICLB
= 7.65)
is
very close to the fully adaptive array optimum SIR (SIRMAX = 7.87).
Both the ESA and fue adaptive array are reducing the jamming severity
by placing nulls in the vicinity of the jammer.
4.4
Problems with Algorithm
When running many four element cases with more than four bits in
the phase shifters, convergence problems occurred.
For five bits the
program converged when used in the interactive fashion described in
FIGURE 4.5
PATTERNS FOR EIGHT
ELEMENT LINEAR ARRAY
0
C(l
'"d
-
30
2
:7i.
-40
CJ
b=4
JAMMER
-10
-20
N-8
K
.\
'.\
\\
~1 1
r r,
1I
l~,~\ 'i/,~~.
II!'
fl: ~ f
1X
"'iH1/
,' ,,
!! 1':
1
1:
i) 1 1 j 1
~
. I I ~
I
n
'
II
1
ADAPTED DISCRETE
-50
II
-60
--- UNADAPTED
Sl RI\~AX = 7.87
PSICLB = 7.65
\II•
~
-70~~--~~~~--~~--~~~~~~
-100 -80 -60 -40 -20
0
20
40
60
80 100
THETA (DEGREES)
0\
0
61
the previous section.
Results for the six element cases with three
bits were also obtained in this manner.
However, when 8 element
arrays with 4 bit phase shifters were used, none of the cases completely finished executing.
Using the program interactively led to
results that were very close to the adapted continuous maximum SIR.
In order to enable the program to start converging, the pre-ESA
processing used for the smaller cases to select the current lower
bound (CLB) for the SIR and the corresponding optimum weight vector
was suspended.
This was done because no advantage was perceived.
Final judgment on this point, however, is reserved for later.
Instead,
the CLB for the SIR was initialized externally to a value smaller than
the adapted continuous maximum SIR.
of success.
These runs had varying degrees
Sometimes the program would update the CLB several times
before reaching a plateau where the same value for the CLB would
repeat.
This type of behavior resulted in the antenna pattern shown
in Figure 4.5.
On the other hand, there were many cases where the
input value for the CLB
was~
updated after several minutes.
In
these cases, another guess was made for the initial value, and the
program was rerun.
The algorithm appears to be extremely sensitive
to the initial value.
The explanation for this behavior is that the
SIR surface in WECN is rather flat; therefore a long computer run is
"'
required for convergence if the initial value is not close enough, from
below, to the discrete solution.
This amounts, practically, to guess-
ing the maximum SIR for the discrete weights.
The program is still
valuable since it produces the required weights and provides performance verification.
Results for larger cases (N=l6, b=4 and N=27, b=5)
62
were unsatisfactory; the SIRclb at the end of incomplete runs was
small compared to the adapted continuous array performance.
More work will be done to improve the program so that these
larger cases can be studied.
in the next chapter.
Some specific ideas will be discussed
Chapter 5
CONCLUSIONS AND FUTURE WORK
A method has been described for obtaining optimal phase settings
for jammer cancellation for an electronically scanning array whose
only variable parameters are element phases which vary in discrete
steps.
The method has been tested by exploring a few examples.
The
jammer cancellation results in these cases have been encouraging.
Results have been obtained for N=8 and b=4 which could not reasonably
be obtained with an exhaustive search.
Even though the amount of
computation is reduced by orders of magnitude, running the program
is still costly.
As a minimum, the approach described provides upper bounds for
adaptation performance for electronically scanning arrays that are
controlled with digital phase shifters, for small cases.
As was mentioned in the previous chapter, the results of the
branch and bound were not always successful for larger cases.
There-
fore, the following programming improvements will be made to increase
program efficiency and thereby reduce cost and generate more results:
1)
Removing double precision on all computations,
after verifying that the accuracy of the results
will not be impaired.
22
Changing the output from the Toeplitz matrix
inversion routine so that the scaling will no
longer be done in the matrix formation where N2
multiplications must occur.
63
Instead, the matrix
64
will be multiplied by a vector and the
resulting vector will be scaled.
This will
result in only N multiplications.
3)
Removing debugging subroutine calls and
executing the program on the optimized
H-extended compiler, which will greatly
increase the program's run-time efficiency.
4)
Eventually running the program on a dedicated
processor with low overhead cost.
Additional conceptual improvements can be made to the branch and
bound method itself.
By constraining several weights at one time, the
branch and bound tree will shrink vertically while expanding laterally.
Constraining more than one weight as the algorithm proceeds from one
level to another down the tree should result in more fathoming.
would provide computational savings.
This
At one extreme, constraining all
of the weights in one step is equivalent to solving the problem with
the exhaustive search method, which is not practical for even moderately large N and b.
Therefore, it is argued that the number of
weights that are constrained at each step offers a computational
effort tradeoff.
Hopefully, the minimum execution time, as a function
of the number of weights constrained at each step, is not a flat
function.
The method described previously whereby more than one weight
is constrained at each level is a rigorous branch and bound technique.
It is possible to approximate the branch and bound method in a way that
65
would lead, with high probability, to valid solutions "rith shorter
execution times.
Figure 5.1.
One such example is described with the aid of
The branch and bound is rigorously applied to subtree I.
The vertex where the MAX
SIR(W~,wt) occurs is chosen as the top
Nt
-c -u
wi EC -U
vertex of tree II.
This procedure is repeated until the bottom of
the tree is reached.
Clearly, the method is imprecise since the
trajectory leading to the true solution at the bottom of the tree may
be outside the search path thus outlined.
Yet, intuition indicates
that much of the time a reasonable solution would be obtained with a
lesser computational effort.
Another method to test the branch and bound algorithm versus an
exhaustive search will be implemented for larger cases.
will be allowed to run for a fixed amount of time.
Both programs
At the end of this
period, the resulting current lower bound for the SIR from the two
methods will be compared.
If the branch and bound value is larger for
several cases, the algorithm will be shown to be superior to the
exhaustive search, in addition to verifying the branch and bound
algorithm without having the program run to completion.
It is expected that using the improvements discussed in this
chapter will enable the program to complete much larger cases and to
verify the results.
Additional development and testing is required
to verify the method in terms of correctness and practicality for use
in real time systems.
66
Figure 5.1 Approximate Branch and Bound Search
References
1.
B. Widrow, P. Mantey, L. Griffith and B. Goode, "Adaptive
Antenna Systems," Proc. IEEE, Vol. 55, pp. 2143-2159,
December 1967.
2.
S. P. Applebaum, "Adaptive Arrays," IEEE Trans. Antennas
Propagat. Vol. AP-24, pp. 583-598, September 1976.
3.
A. I. Cohen, "An Algorithm for Designing Burst Waveforms
with Quantized Transmitter Weights," IEEE Trans. Aerospace
and Electronic Systems, Vol. AES-11, pp. 56-75, January 1975.
4.
W. F. Trench, ''An Algorithm for the Inversion of Finite
Toeplitz Matrices," J. Soc. Indust. Appl. Math., Vol. 12,
No. 3, pp. 515-522, September 1964.
5.
S. Zohar, "Toeplitz Hatrix Inversion: The Algorithm of W. F.
Trench," J. Ass. Comput. Hach., Vol. 16, pp. 592-601,
October 1969.
6.
L. J. Spafford, "Optimum Radar Signal Processing in Clutter,"
IEEE Trans. Information Theory, Vol. IT-14, pp. 734-743,
September 1968.
7.
D. K. Cheng and F. I. Tseng, "Haximization of Directive Gain
for Circular and Elliptical Arrays," Proc. IEEE, Vol. 114,
No.5, pp. 589-594, May 1967.
8.
F. R. Gantmacher, Matrix Theory, Chelsea Publishing Co.,
New York, N.Y., Vol. 1, p. 322, 1960.
9.
R. F. Harrington, Field Computation by Moment Methods,
The Macmillan Co., New York, N.Y., pp. 191-193, 1968.
67
Appendix A
MAXIMIZATION OF THE SIGNAL TO INTERFERENCE RATIO
The results of Cheng and Tseng [7] in relation to the maximization of the ratio of two quadratic forms are presented below.
Their
proof establishes that
w
(Al)
=
maximizes the signal to interference ratio equation A2.
~I
=
SIR
wt
M
2
(A2)
w
Cheng and Tseng's results are applicable subject
to~
being
Hermitian and positive definite and the numerator of Equation A2
being a quadratic form of an Hermitian matrix.
These features are
established next.
Expanding the numerator, Equation A3 is obtained.
=
w
(A3)
We will now use the following substitution
T*
=
W
(A4)
~q
where W is the vector of unadapted weights representing the optimum
~q
compromise between such performance factors as resolution, gain, and
68
69
low sidelobes.
Another substitution is used in Equation AS.
A= [
~q
wt
-q
J
(AS)
It should be noted that this is an outer product, or dyadic form
which is an Hermitian matrix as shown in Equation A6.
=
(A6)
A
If the noise components are uncorrelated, the noise and interference covariance matrix M will be diagonal.
nonzero entries in any position.
=
M
.
.
~n
~may
[mij]
. th and J-. th c h anne1 ~s
.
t h e ~--
(A7)
, i=l, k, j=l, k
.
g~ven
The covariance of the
by
m.. =
E{n. * nj}
~
mji =
E{n. * n.} = E{ni n. * } = m.. *
~
~J
have
It is denoted by
where k is the number of receiver channels.
no~se
In general,
(AS)
J
J
~J
(A9)
This results in Equations AlO and All.
*
Mt
= M
(AlO)
=M
(All)
Therefore, matrix M is Hermitian.
It is also positive definite since
70
M is the covariance matrix for a stationary random process.
Equation Al2 is greater than 0 whenever W
t
P
n
in
0.
(Al2)
Therefore, Equation A2 can be written as
SIR
=
wt
A
w
wt
M
w
(A13)
The proof of Cheng and Tseng makes use of the following theorem
from Gantmacher [8].
THEOREM:
Given n x n Hermitian matrices
£ and D with Q positive definite
the equation
1£- A Dl
=0
has in general n distinct values for A (eigenvalues).
Then:
1)
The largest characteristic value AM is the maximum of the ratio of
the quadratic forms
A
M
=
max
wt
D W
and this maximum is assumed only for the eigenvector W associated with
71
the characteristic value
~,
which satisfies the following homogeneous
equation:
CW=
\i.l?..~
(Al4)
The following properties enable the maximum obtainable SIR for a
receiving array pointed in a specified direction to be determined, as
well as the required set of weights to achieve it.
a)
The largest eigenvalue AM of the linear combination A
AM is
its only non-zero value and is given by
=
b)
-1
W M
~q -
W
~q
(Al5)
The eigenvector corresponding to AM is
=
-1
M
W
(Al6)
~q
The following proof is used to establish the above properties.
Proof that
~
- AQ has only one non-zero eigenvalue AM
In order to show that the linear combination of matrices C - AD
has only one non-zero eigenvalue
~'
the following approach is used.
THEOREM:
If C and D are, respectively, m x n and n x m matrices, then
(-l)m An det (C D - AI )
--m
=
(-l)nAm det (D C - AI )
---n
where I denotes them x m identity matrix.
-m
(A17)
72
Proof:
(Al8)
lrn
[D
-
[f-lrn
0 ]
-I
=
0
--n
A~]
(Al9)
Since the right sides of Equations Al8 and Al9 are the same, the
determinants of the left sides are the same.
Therefore, Equation A20 follows:
A~]
det
det
=
(A20)
det
[:
-~J
AI
det
[ 0-m
C ]
D
f.-~~
Noting that the determinants of the matrices in Equation A20 have the
following properties
det
[-:
det
~
~]
0
l
=
(-l)m
(A21)
=
(-l)n
(A22)
-I
--n
since both matrices are lower triangular and the determinants are
73
equal to the product of the elements on the diagonal and
det
det
[c Q
[';
-
AI
--m
0
c
DC
,~]
=
An det (f. .!2. - AI )
--m
(A23)
Am det (D f. - AI )
-n
(A24)
AI]
-n
since both matrices are upper triangular and their determinants are
equal to the product of the determinants of the (matrix) elements on
the diagonal, we obtain Equation Al7:
(-l)m An det (f.~- AI )
--m
=
(-l)n Am det (D C - AI )
--
-n
Q.E.D.
For the purpose of establishing property a) and Equation AlS
the eigenvalues of the linear combination A- :.\Mare needed.
These
are the roots of the characteristic equation
det
(! -
A M)
=0
(A25)
Since M is Hermitian and positive definite it has an inverse and
Equation A25 can be written as
(A26)
leading to Equation A27.
det (M-l A - AI )
-
-
-n
=
0
(A27)
,,
74
Substituting C = Wt and D
-
-q
into Equation Al7 results in
(A28)
With m
=1
= N we
and n
obtain
(A29)
or (-l)(l-N)A (N-l) det (Wt M-l W -AI )=det (M-l W Wt- AI)
-q -q
1
-q-q
~
Letting
...
A= wW
1
-q-q
(A30)
and using Equation A27 gives the result
A(N-1) det (Wt M-l W - AI ) = 0
1
-q-q
(A31)
Hence, N-1 of the N eigenvalues of A - AM are zero and the only
non-zero eigenvalue is
thus obtaining Equation AlS.
Let an N X 1 column vector be equal to
(A32)
which can be written as
W
-q
=M W
(A33)
'
75
It follows that
(A34)
=
since M is Hermitian.
Substituting Equations A33 and A34 into Equation A15, the only nonzero eigenvalue is
(A35)
since M is Hermitian and positive definite.
Thus, AM in Equation
Al5 is the largest eigenvalue.
We proceed next to establish property b) by proving that the
eigenvector of A equal to M-
A~
corresponding to its largest eigenvalue is
1w • Using C
~q
=
A and D = M in Equation Al4 we obtain
AW
(A36)
which can be rewritten as
(A37)
using Equations AS and A32.
From Equation AlS
Therefore, Equation A37 can be written as
76
W AM=A W
-q
M -q
Hence, Equation A32 is the optimum eigenvector W .
-opt
W
-opt
=k
(A38)
Therefore,
-1
M W
-q
where k is an arbitrary scalar which we set equal to unity without
affecting the results.
Appendix B
MAXIMUM SIR FOR A PARTIALLY CONSTRAINED
WEIGHT VECTOR
The SIR for the fully adaptive array is given by
!wt w*l2
SIR
=
~
~g
wtM w
wt(w wt]w
=
-
-g-g -
(Bl)
wtM w
where the optimum weight vector which maximizes the SIR is
Consider a partially constrained weight vector
denoted
by~·
~·
which is
The B vector is partitioned into an unconstrained and
constrained subvector as follows:
B =
where b
=
[t]
(B2)
unconstrained subvector
B
= constrained subvector
~o
The unconstrained subvector b that maximizes the SIR is derived
next.
For this purpose, the vector W and matrix M are partitioned
~q
to be compatible with Equation B2 as follows:
w
-q
(B3)
=
77
78
M
~
•
(B4)
:]
Substituting Equations B2, B3 and B4 into Bl yields
~o;t ~:~6
[~J
~
[!a]
[" at aA t]
[b t
SIR
Bt]
-0
=
[bt
Bt]
-0
~~
C'
.::.0
(BS)
[aatb + aA tB
[bt
=
-~ ~
--0 -0
.
t
~o~T~ + ~o ~o~o
Bt]
-0
+ fo~o]
rb
ctb + y
--c-
[b t
.j.
BI]
-0
~0
.::.0~
=
where
n, e,
p,... and y are shorthand notations for the lengthy
sions in the previous step.
2: b~
i
SIR =
J..
z b.*
j
J
expres~
The equation can be rewritten as
n. + e
J..
=
p. + y
J
N
D
(B6)
79
n, 8, p, andy are all functions of b. SIR is a real function of b.
Let the dimension of b be k; then SIR is a function of the 2k real
variables that constitute the real and imaginary parts of the components of b.
To maximize SIR, it is necessary to take 2k partial
derivatives with respect to the real and imaginary parts of the components of b and set them equal to 0.
d(SIR)
d[Real (b )]
r
=
0
Consider
d(SIR)
d[Imag (b )]
and
0
(B7)
r
Equation B7 can be shown in [9] to be equivalent to
d(SIR)
ob r
=
and
0
()(SIR)
ob*r
=
0
(B8)
th
where the r-- component of b,
b r , and its complex conjugate, b*,
are
~
r
treated, for the purpose of taking the partial derivatives, as if
they were real and independent variables.
Taking the partial deriva-
tives of Equation B6 yields
()(SIR)
0
() b*r
D
p
which gives nr
r
(SIR)
or, in vector notation,
n
=
(SIR)p
(B9)
Substituting for n and p:
(BlO)
80
The unknown in Equation BlO is the vector b.
M b
--c-
=
(SIR)
Rearranging:
a-~ ~0
(Bll)
The expression
.l.
.l.
Cl.
=
[~~~ + ~0 ~0)
(Bl2)
(SIR)
is an unknown constant.
Substituting Equation Bl2 into Equation Bll
we obtain:
b
where
g
= ~ -1 (a.a - ~ ~0) = a.~ -1 a - g
(Bl3)
= ~-l~ ~o·
Substituting Equation Bl3 into Equation BS yields
(Bl4)
Thus, the SIR is a function of only one complex scalar, a..
Maximi-
zing SIR with respect to a. yields the value of a. which, when substituted in Equation Bl3, gives the optimum b, denoted in Chapter 3
by b-op.t
When the same value for a. is substituted in Equation Bl4,
the maximum SIR is obtained.
fl
81
Carrying out the multiplications in Bl4 yields
(Bl5)
J
Making the following substitutions,
q
=
Equation Bl5 now reduces to
SIR
=
2
*
* q-ag t aq+g t aaTg-g
.
t ap-p * aTg+p*p
'
a*aq -a * qa t g+a'qp+ap
- -
~
-- -
-
~
(Bl6)
To find the value of a required to maximize the SIR, the partial
derivatives of Equation Bl6 are taken with respect to a* and a as if
they were independent real variables, obtaining
~** = D[aq
2
-
q~t~
+ qp]-N[aq]
(B17)
=0
D[a *q 2 - qgt a + p *q] - N[a *q]
~-
=0
The two above equations are complex conjugates and yield the same
information.
Equation Bl7 simplifies to
D[aq- ~t~ + p] - Na
=0
(Bl8)
'
82
From Equation Bl8 we obtain
~ = q- [~t~- p]/a
SIR
(Bl9)
When the a corresponding to the minimum or maximum SIR is substituted
in Equation Bl9, the corresponding extremum value for the SIR results.
Substituting the values for N and D from Equation B6 into Equation
Bl8, following some complicated algebraic manipulation, the following
quadratic equation in a is obtained:
2
a q~* + a[8q-~~*] - ~8=0
(B20)
The solutions for a are
(C M -la
~/q
a
=
.::.o:=c
~
(B21)
=
-(8/~*)
(B22)
Substituting Equation B21 in Equation Bl9
SIR .
m1n
~
q- ..,.....-'..,.......,..-
(~/q)
=
0
Substituting Equation B22 in Equation Bl9 gives the maximum SIR
83
SIR
max
q
]J]J*
+ -e-
or, in terms of the original quantities,
(B23)
SIR
max
This quantity is denoted in Chapter 3 by
~
max
.
Appendix C
COMPUTER PROGRAM LISTING
84
onooooto
(\I)Q(.I{)(.Ii-;0
8
•*** MA~SIR (N,L ARE USED FOR VARIABLE DIMENSIONS)
~·C iHIS
PROGRAM CALCULATES THE LARG~ST LOW~R ROIJND FOR AlL WEIGHTS
ONSTHAtNEDA THE~ IT US~~ A BRANCH AAO ~OUND ~~OCEOliR~ TO
C
ElECT fH€ uPT~~tJM PHASF8 IN OROER TO HAXl~tzr T~~ SJ~NAL TO
C ~t@AFERE~C£ R TIOa IT ~~lb THEN PLOT PATTERN§ ,oq 6HHAYS WITH
C
V4RIETY O' JAMAEK CON, G RATIONS.
·
8
DIMENSION
+
+
•
Ot10000 ~\)
()('Q()(.I()lllj
{:lt:)Q8(\0SC
000 OOttO
OQt'Ot'<! "II)
000\Hl()BQ
oooooo'fo
~0Qt)f)
A(64) 1 RETAJ(\Ol(EXP(b4),
M~b4tb4)tHfNVRS,ba,~Ol 1
()00001t'.O
1 W(~a),
w PTCb4) WQ(h4) HNC&b\
~
(6a,~4)~PJ(101
o('o~o1 :~o
•
WTCONMtbi~,WCLaf~q,,THfTAJ(lO~,PJOS(10l,PROO(b4,64)
DIMENSION
tO RET .1 Ct 0 l Ex:p C6q)
+
M &Ut~4), lN~RSt64 64)~~J(~4,b4) 1
•
P (10 ,W(f>4 WOPT 4l WCHn4l RN(b4
E 8R4NC~
+
. WT ONH(b~~,wctAfb«~,THETA~(tQ) ~~08ttO),PROD(b4 b4)
AND BOUND o•T•
~
c
DIMENIION CON(b4) UNCON(b4) 8CONC(b4)
'
Of~EN tON MC(h4J~&, cOCbn,~&\ 1 cocTCbh,b4),V(64,o4),NPAS8Cb4)
o ME~ JQN AT(~a Ao ~4) Bo(~«l
OIME;~~ XON flt(t,IJ :R2 ~~.t);RnPT(~4)
OXMENStON MCtNV(bU ~a~ 1 MriNCnCb4 64),
+
VOUT l ( b4 l, VOIJT ~ t ~;~to, Y:H 64), Uf t,a), V ( 64)
~
A!SUHE TH! LARGEST NUMBER OF ~ITS fOR PHASE SHtFTERS IS b
E
c
DIMENSION jHR(b4)
c
oiMENSI8N CON(&4,,UNCONC~4~,acoNccool
o0 M~NS~
N MCib4l~q)tCOC~a,bq) 1 COCTC~hlb4lrV(b4,b4)
M~NS ON AT bU , AUC64)l AO(b4, 1 NPAS~C&«J
DXM~~s gN Rt ha ,R2(h4) HOPTjhiJ)
OIMENSX N Mt NV ba 1 b~\ 1 ~CINCO(o4 64),
.
+
VOUTl(b4 ,VftJTl(~:tilJ,VlCb4),Ufo4),V(f:.4)
c
COMPLE~*tb EXP,M 1 MJNVR8 1 WOPT,WQ,W,WCL8,WTCONM 1 8Nt(bU,b4)
cOMPLE.)(•R WSOL
c
PRECISION A 1 8ETAJ,8ETAS,PJ,PQ,SIRNu~,SIROEN,THETAS,RAD,
*DOUBLE
THETAJ,PJ0~ 1 PSJC\.~ 1 AIP.
REAL•A PStMA~,SICL~
COHPLEX•t& MCJCO,COCT 1 V. 1 AT,Ao,~o,AMR~BOPT~8C0NC
COMPLEX•t• ~C NV,MtiN~O,VOUTt(VOUTl,v3,U,vrAl
COM"LEX•tl, wO)T 1 wQ 1 wc:b~,M,wTr.JNM
INTEGER At R2 CuN UNC ~
C •N,L ARE U~EO ,oQ'VARlA6L£ DIMENSIONING
COM~QN N,l.
INPUT OATA OEFtNtTIONS
E ** N,L
DETERMINE OlHENStON FOR SEVERAL VECTOR~ AND ARRAYS
c
c
c
~
c
Alb
1
1
1 0()
00\HH•tl ()
1
0 0 (:U:it,H lll)
OtHlOOtSO
(IC')Ot'O ~hi,)
(';Of.\(1()170
000001AO
000001(~0
OOOOO:>OO
(\000('~ 1 Q
t)OOOOt-~?.0
OOO()O?.SO
O()OQO?.AQ
1)(.\()I)OrC:.O
ooooo;.·t,l)
Q(H)OO? 10
o~ooo~P.o
()00002Q()
('~I)Qo:~oo
11)0000310
()00C03;.lO
I)()() I)(!:~ ~I)
coo~,o·:;oo
()0 (}I} 0 ~ :~id)
0 Q (HH) : 1) ~>~I)
(}~00()~~ 1Q
OfH'tOO!,go
!+ I) (H) Q .S '0 0
OOOQOl.IOI)
000001H)5
00(\CII.)IJ l 0
() Q (H) (;< 1.1,?. 9
OOOO!Jll
~()
1\')Q(',IQIJIJLI\)
('0~()1)/.ar;.o
OUOOOIH,i)
OO~OOI.i'IO
o<>ooonf.l.o
00,)001100
IJO')QOSOO
(){'(,)00510
oooooe.r.o
tHlOOOS~O
~0(\0Q5H()
00
l/1
c
€
c
~
~
c
~
~
c
c
N•NUMBER OF Et..Et-4ENTS IN THE ADAPTIVE ARRAY
onooosso
LsN\)MRER OF JU1MF:RS
00Q005"0
0 0 0 /J 0 ~.:; 'I 0
~a4PER4TURE ILLU~JNATION VECTOR (IF A IS •LL ttSt THFAE
UNIFORM
WF.:tGHf ANO NO RIDf.tiJ!iE
TTENlJATlON) OOOiH•~;HQ
THE TAJ•JAMMtNG SIGNAL DJREC T ION ANCl.E: fROM Mf CH. eor.t:;HGHT
000005QQ
N OfGRf[S ( L NOICATES LT~ J~MHERl
00000601.)
THETAS•O SI~ED SIGNAL DtRECiiON ANGLE FROM MECHe BORESIGHT
00000~10
N OtGRF.f.S
()(\()0(}1;)20
PJDRsNOt ~ POWER OF EACH JAMMER IN OECI8EL8 (0 TO 100)
OQ?Q~P;..~O
('()')() O"tt ()
t1N0f.X
~NOICAT[S lTH JAMMER)
000(~\)t:,~~.,
PQaNflJSE P W\R OUTPUT Or EACH ELf.MENT (QUIESCENT NOIS~ POWER)
AS A RATI, OF SIGNAL, TO NOISE
.
()00006.&,(}
NBITS •· NUMA(R OF PHASE SHIFTER BITS (USED IN WEIGHT SUBROUTINE)
()00011610
~ANG~ 2 TO b ijJTS
OtHjOOhP.O
1s
Ib
NAMELI8TINPUTt/N,L,A,THETAJ,THETAS,PJOB,PQ,NSITS 1 LIMNB,TEMCLR,
+
I<CMA)(,t<C~A)CN
OATA OLAMIOt5/,P!Il,t4lSQ2~54/,0EG/51,2QbltRA0/0~0l7~53/
INITIALJZATJON'
PJ(t)
l'!'LF~~M ol Th~A
I
J 8
•
8
~c
c
I)0()007qo
('00008~0
O*P *0 AM*DS N(THETAJ( )•RAO)
RA,IO OF SJGA4L TO JAMMER
•to.o••CPJoB<Y,-o.t)
g *** REVISED AND SIMPLIFtfO BRANCH AND BOUND
E N JSTS TH'NUMRf.R OF ARRAY EL~HENTS
i9 THE NUHR~R 0~ PH~S~ SH_FTER BITS
c NB
OPTt~UM
W~t~YT
VECTO~
t'00QOA10
oooon~lfi
0001)\'HUO
OOI.)Oi"!,'HlO
OtH)()(Ig~>O
CALCULATE THE QUIESCENT WEIGHT VECTOR AND THE JAMMER COVARIANCE
lNO tfS 1NV£~SE
CALL MWQ(ALBEJAJ,B!TA5,E~P,M 1 MINVRS,MJ,PJ,PQ,wQ,
+
PHOO
CALCULATE lHE LAR~EST CURRENT LOW!R BOUND WHE~£ ALt wEIGHTS
AR~ CONSTR tNEO Tu A DISC~~TE SET OF VALUES
(~SIC 8)
THE ASSOCIATED WEIGHT VECTOR IS ALSO OUTPUT
10 CALL 81RCL8(WtWQ,HSMINVRS,WTCONM,WOPT,WCLB,NBITS,RN,A,
+
P~ltL8
WO Y IS THE
ooooo·rso
ro
E
c
0000073\l
l)()()(.\()7t10
000l)07~0
5 CONTINUE
8
0000070~1
()00()Q'1l0
{I(HJ007i?O
{11).1.)007,4,0
00()QQ7
READ (S 1 NPUT1 1 ENDa2le8)
BETAS 12,0 * PI•OLAM•DSIN(THETAS•RAD)
no
s
~ TAJ
c CONY~RT
(IQ(')()O~t)\)
()00Q0"7<t1
PRoGR•M
OVER THE CONTINUUM
(t()fJQQA~O
O·~?()O.a. IQ
MATRt~COOi)r:\~0
000()0.1."\!1()
ooooo;1o~
('0~100~1 Q
00000'720
-:-OvQV<i.11•0
~i)Q(i'.)'H10
ooooo~so
('QOOOq~O
0 () (1 0 0 l? '1 ()
oooonq~o
oooo~q~o
oooo cno
OOO(l Ott')
(100 1H O?Q
t.~c.oolo:~o
(}0 0 01
0 ll 0
ooootoso
I)OOC~Ot~O
0000~070
(\000 l OEHJ
00
0\
c
c
c
~
c
8c
WQ IS THE QUIESCENT (UNJAMMEO) WEIGHT VECTOR
WQ IS PARTITIONED INTO AT(UNCONSTRAtNEO)
ANO A0(t0~5TRAJNf0)
BCONC IS
CONSTRAINED OPTIMAL. WEIGHT VECTOR~ ONE ELEMENT IS
DEfi~ED f CH TIME CHSW IS EXECUTED.
BOPT IS lH~ UNCONSTRAINED OPTtMAL.WEIGHT VE.CTOR• IT IS CALCULATED
FROM PAR M TERS DF.FTNEO IN THE PS!MA)( SUBROHtY~JF~
PSICL~ IS ti~ ~APt;f.:A~ CURRfiNT tOWf.R f1011NO fl_,;i, 1 ·~~ 51R
WC~R IS TH
~E GHT V.CTOR ~nnq SPO~OlNG TO P~Trl"
M s tHE J MHE
nv• tAN E MAT x
Sl MAX IS OHE OP~IMU~ St~ OVER 'HE CONTINUUM••NOT USED
IHE
~
c
~
~
THIS
c **
IS THE BRANCH AND BOUND PORTION 0, THE PROGRAM
•
c
c
c
c
c
c
c
c
I(.Ot
II~
H· N EX
* ~u~
1.
.
.
wtlL
W L RUN
lk
usEo
ROM
TO N+l
·
~oq olMf.NStONING THE
ARRAY!
~
00 50 J•lt"OIM
.
.
6MR(J) • ~£XPCCo.o,t.O)•(J•t)•RRAO)
CO~TINUE
C WCL8, PSICLR IS THE SOLUTION FoA TH[ UNCONSTRAtNED CASE.
c
c
NHt •
N
onooit"'o
{'IQOQ~it.,O
()(ii)Q117Q
C00011Ar-J
IJ~t(ll)11
r,;o
()<)00~200
GOGO 12 lt')
OOO<H;?..·.o
00001?:!14.)
()0('>1)1,z'"'!IQ
1)0(\Q~?kO
C00Q~2'70
c
~ FOR FIRST TIME THROUGH JHE BRANC~ RULE, M IS NOT PA~TtTIONEO AND
C SOPT ~ ~OPt &~D PSJMA~ S PSJCt.O
c
0000 11.~0
00t'Ol1UO
1)000 l r!SS
WRITE (~,.) KCMAX
I n l
K22CNT • 0
NPASS(I\ • I
J~tN9XfS,NE~2) GO TO 20
AIC~Rs"S CLo
GO 0 30
.
20 1~(. ICL8AGTAPSICL8) GO TO 30
20 AtCU~:TEMCl."
wRIT~ (~,~) SICLB
0 CONTINUE
ALCULAfE THE VECTOR FOR THE WEIGHT VALUES B•SED ON THE NUMAER oF
HAS€ SHIFTER BITS
HDIM • 2 ** NBlTS
RRAD • 2.0 * Pt/FLOAT(HDIH)
50
G'~001.UO
0(10011~0
00tl01?50
kt<~NTN•O
N •O
~
000010QO
~000 11 0.0
CA L ANGLECWOPT,NHL,ANGL,PJ)
00001?.~0
oooot?Qo
00001~"0
t\000 L!.05
Q0~0131Q
Q(lOOLH.?
00~0 1 ~~?Q
00001~JO
oooot:~t-40
ooo"tr5"'
(\f\0()1 .,-',()
olHltH :no
n.ooo~~fio
00001
t~HS
000Q13t~t')
QQO?lt~flO
1}00011!10
0000lL120
OOOQliJ,~O
1.)00014~0
0 0 0 0 11J r~ 0
000014b()
(1000lt.t10
OQ001UAO
0(Hl0 14'Ht
Ot'?Q1500
'.'O~H) 151!)
(\(}()0\'?2()
tH!OQ1).AIO
~00015,40
Q!J~0~5SO
,_ 5~0
oooot':)so
~Jo-:•o
t'OOQ~~7()
0000151')0
(X)
'-I
c
~
c
E
c
c
c
E
CALCULAT~
O~T[R~IN
A(R) TO
THE INDEX INTO THE ALLOWED VALUES '0R THE WEI~HT VECTOR
Rft 1 l)t THE INOEX cnqRESPONnlN' TO THE Cl~~~~ST V~LUE
HE W~ ~HT(tl) DUE TO THE NUHBER OF PHASl SHI~rfR SITS
CALL RtR2(1,HDJM,ANGL 1 Rt,Ri,Pl,SEQ 1 IN0 1 N)
()0001td0
0 I) , ~! 1.1 ()
('\1~1
100 NP
I •• ~+~
• (.
WRY'
~HL
a
0000 lMHJ
QOOQl"qt)
•. I
1,*,
t,NPASS(t)
'JII)I}(;I
1)01)0~ 1.HI
1)00011S()
N•L
0000\i"S
1
II:'~~TN aKCNT~+I
NT+!
OT II I(~OT • t .·
'
Jf(~~Nl,EQ 1 25000) WRJTE (6,*) KCNT,K80T,S1Ct6,WCLB
WRI
bt*J t PS~MAX SICLA
TF . S. HA~ G.'s C A)'GO TO 2t0
k
JF(~CN N.FO.~eHl~b)
1
fF(KCNTN
GO 10 IIOu
()00017~0
Q(l()Q17"10
()0001780
OOQO 1 7f~O
(l0()0 1 p,Ot)
()()f)')
C l5S RCONC(L)IAMR(R2(L))
c
lbO CONTINUE
c
tFCI.GEefN+t)) GO TO ~00
c
C REORDER AND PARTITION THE MATRICES USED IN PSIMAX
c
CALt RE. ORPRCNHL 1 N~BCONC~MtMCtC0 1 COCT 1 V.,ATtAO,R0 1 L,wQ!CON,UNCON)
CAl StM~~(NML,~~MC(COt O~T,v 1 Al,AO,~O,MCINV,PRuD,MC1NCO,VOUT1,
+
voUT2 1 V1,u,v,A ,P, MA~,ANt)
I<CNT • KCNT+j
WRITE (~'*' KCNTrKROT,SICLB
J f(KtNT.eQ.KCHA~~
F(KCNT 9 EQ 1 (KCM.~+t)) KCMAX•KC~AW~JOOO
wqtTe (ol*J PSIMAXtSlClB
c
tF (PS!M XlLT.AICL~) ~0 TO 400
ROPT(lJ • l*U(l) • V\l)
.AL. N (AOPl NH •NGL,P )
~AL~
t2~~J,MDIA,•~6L 1 Rt,RI,PI,SEQ,INO,N)
GO ~0 10t)
C ZOO CAlL NSIHA~CACONC,WQ 1 M,WTCONM,N,P5lMA~)
I(
171 ()
(';()00\7(,()
SELECT VALUE 'OR NEWLY CONSTRAINED COMPllNfNT 0, WEIGHT VECTOR
150 t'(INOrNElO) GO TO t~S
K NT a
f'J(}(i0,~111)
(;t()001i;110
(10001701)
aao~gc 1; MR(RI(L))
c
('0(1Q1~10
000016~0
oo Qt• ~ etf.o
L • l•l
~
OOOOtbOO
wRITE
~Q.(KCMA~N+t))
(b~•)
KCNTN,KBOT,siCLR 1 KCMAXN
kCM-~N•KCMAXN+JOOO
ZlO JF(PSIM4X.EQ.SlCLB) K22CNT•K22CNT+l
1~ 10
()()(101~.;.?0
000() l P.lO
oooot~ao
OOOQtF."!-0
(\0001~~0
(\t)Q 1HA'7()
OGOO~P.~()
~0001H90
ooootQno
~Q~O'-f';)tO
OOOOl'JeO
oooo~<;,;o
O~OQ,</~1)
ool>o 1q~~o
()00019~1
00001!?t>.()
OO(HH ()10
t;'OQO~t:U~O
0(}001t;!Qi)
(H)C(.Ii!()t'l('!
(•{'()OrO 1 Q
000(}~~020
:s
(I (' ".· 0 ~~. Q 0
1)000?0~5
(1(1()(,?(\tl{l
tHrOOt~O~I)
(I(IQ(}t,ll)~()
~;')00?07Q
()()(l()t?(i$1
0
-., 0 Q () 11 QA l
0(h~OiiOA2
(I(}Q(!.!!QAl
OOOOi'OAtl
00
00
WRITE (bt*l PSlMAX,StCLB,K22CNT
S I Cl. ~ • P !\ 1 M4 X
00 2ti0 J•l N
Q()()(J2(IO(l
~CLBlJ) • ~CONC(J)
tF(K?.2C~T.EQ,l0) GO TO t9qq
** FATHOM VERTEX
Z50
~
~
CIJ~TINliE
l
400 NPAfS(L) 1 NPA8$1l) +
JF NPASStt) 1 G~ 1 ~DIM+ )) GO TO 500
IF . NPAS$( ),N~, .) GO 0 4~0
I~D •
no
To so
c
Q00021 ;;;s
~Q<HJ.? 1 J1)
OOOOi"~ll(l
00001?150
OOOQe'tt...l)
0000a'1'10
00002180
OQ00.?.1t?Q
450 I • t•l
COOO?.t~?O
()QQ()t';~3\)
trci+t
·
GH(JNO,S!Q,Rt,R2,MOIM,J,N)
~~t=~ML•t
GO. TO 150
500 NPASS(L) e l
J • l•l
t. • L•1
NML • NML+I
NO a 0
F i'~~T.t) GO TO GOO
lqqq r.ON t~UE
00 .000 Kt<Kat 1 MOIM
WSOL • A"'IHI<K,c,)
WRIT~ (b,*l WSOL
I
aooo
coNTaNtJ£
00 ?.tOO t(t<t<•t 1.N
wSOL • WCt,I!\(KI'\1()
wRit~ (~,•) WSOL
2100 CONT NtE
WRIT ~b,*) 8ICL8rNBtTS,KCNT,KBOT
CALc. ARR•v ''CTOR &No PLOT GAIN FOR ALL THREE WF.tGHT VECTORS
CALL ARFACT(~ 1 ~CLS,WOPT~WQITHET.J 1 THETAS)
tFinaiTS.(Of 1"~8) GO Tu 2 6~
N!JITS • N'\I •t.
r,o rn to
21b8 CONptlNtJE
STO
0[13UQ 8U8CHK
c
c
co9oi1to
01l00.?.1?0
('0()0~?-l'H)
c•LL RR
E
c
0000..'.100
l
~~t:AHLtt
c
nooo?o~s
ENO
SUBROUTINE MWQ(A 1 8£T&J,BfTjS 1 EXP,H 1 MINVRS 1 MJ,PJ 1
ooooc?10
IJOOOl;:tiO
00(H) i?.250
OOOOl?ii\Q
I)(H)£)?21(>
OOI)Q~~~()
ooOo22CJO
0 MH; I. 3 o()
?OOQ?~tO
OOQO?.:~rl)
v \J t";)l
•.
,)
u
0 ""•"'
''"
~
~~
oQoo.r .-,ao
oooo?::r;o
<HH>023"8
('100(1?
-~I
oooo21"1)
OOOQJ!~1t!
"000i?'i.1S
~ooo2:n6
00fJQ2~77
f.IOIJOr3f\?.
00002~VW
0000~-~B6
oooo~~AP.
0000t?3it:;O
0000?3~.?.
t)t.'00i?Yi3
00 00~ ~r'J~i
~J~OOOi.l,Qb
(\0(\0t:'LHJ~t
OO()O,l/.l.tO
1)00021A?O
l)()()(ii'lAif.()
OOOQ~fJ.tlO
()0002/J'!H)
OOO{l2tH.()
0 0 0 () ; l.i)' 0
IJ000?.ll8()
OQQO#!.IAqO
(X)
~
+
PQ,WQ,PP.OD)
1)0002'500
~ HI~ ROUTINE CALCUL.TES THE QUIESCENT WEIGHT VECTOR
c I NO TH~ J M~E~ CONFIGURATION (COVlRIANCt MATRIX)
PLUS ItS tNVE~SE
~
c
00002'510
t'Cit:~o?s;:o
00 1l0?5.~,Q
Ch'.l 0 ();;»5!1 0
t'OOO~S':~o
<:*f..HJ02~~~o
DIMENSION A!N) 8fTAJtl) EXP(N)
M N 1 ~),~lNV~StN,~),H~(N,N),PJ(L),WQ(N),
+
PROO(N, )
COMPLEX*Ib EXP,M,MINVRS,MJ,wQ,SUM,PROD,TMCt00) 1 RC100)
DOUBL! PR£Ct810N AtBETAJ,B!TAB,PJ,PQ
0.00()?~1'0
+
c
c
c
~
C0~t-10N
N L
CALCULATE THE QUIESCENT WEIGHT VECTOR (WQaA(TPANSPOSE)
*
OOOO;?Ci€\0
~ooo;s·~o
(l01)Qi?f)~0
()(i()i)fJI, 1 0
Oil002b . ~o
oooot?.-,>o
EXP)
oo too
t<•trN
E~P(~) • ~uEXP(COaOlpl,O)•CK•l)•BETAS)
WQ(K~ • A,M) * EX~(K)
100 CONTINUE
E
c
~
THIS LOGIC FILLS IN THE fiRST ROW OF MJ
DO 200 y•t,N
SUM e ( ,O,Q,O)
DO ISO •t,L
·
~UM • SUM t PJ(I)*CDEXP((0.0 1 1eO)*(J•l)*BETAJ(I))
150 CONTINUE
MJ(lfJ) • SUM
200 Cl,NT
~llJE
fiLL IN THE MAIN DIAGONAL ELEMENTS
C
DO 300 1<•2 N
MJ(kiK) • HJ(t,t)
g
E
300 CONT t-WE
FILL IN UPPER IRIANGULAR PORTION OF THE HJ MATRIX (TOEPLITZ)
Hf.R~I1'JAN I"1Pt. f:S M(J,t)a"4(J 1 ,J)•
NHt • N•l
~M?. a N•i!
00 700 l(o2,NMl
S~T5~0 ~~!~NM2
tF (JKf) l~l,SOO
()t)Q()i,llf:o,LI"
~>ooo2b•;o
()1000;.>~60
(1(\0Q;!b't(J
(If..~ \) f) ;> 6 ~ 0
()I.Hl()?hG!)
1Ji)00i HHJ
oooo27to
0000~720
(){100~730
1)()()()27&0
000027~0
(}000~7h0
tJI00027i'O
o~,oo;-780
000027Q(}
{\0Q0?800
.,OOQi?fH 0
00002.A?.O
oooo;..".})O
()()QQ?P./Jt)
OO()~);!'F\t;~t.)
OOOQ?P.~10
oo6o . u~·~Jo
o:.?og:?.B.
e,£
.?A~•J
oooc.!?.qoo
(100
()000~CJ1Q
(H) QJ. •? ;1!o
<P 0 I) 0 ?.li
OOOOi?~t.ao
o
~
1 H J+ 1 J+~ U MJ
KJ
M~~J•k,J•t • ocb~~G(MJCJ+t,J+K))
t~ CtJ•~).r.Q.N) r.O TO hO~
500 CONTI~UE
hOO MJCKtll a DCONJGCMJ(t,K))
700 CONTJ~UE
HJ(N,l) e OCONJGCMJ(t,N))
.H>
OOI)0,~9r~o
()0{11)i"7~Q
00002\)/'t;J
()000.?.1?1'-H)
Ot'OQ?'f"'O
0000l(H')O
Q c \) I) ;~ 0 t 0
OCH)0~02€J
0000 :so:so
() 0 IJ Q 30_£1 ()
\0
0
c
c
c
c
0000305()
**
c
c
CALCULATE THE TOTAL COVARIANCE MATRIX t H • MO + MJ
MQ ONLV CONTRIBUTE$ • PQ TO THf D.LAGONAL Et.f.MfNTS
AND ITS
I~VE~SE
00 C)OO Jat,N
09 800 K•ttN
c
:gg
M~~fK)
8 M,J(J,K)
~o~n I~~~
lORN~R,MINVRS,N,
29N!gAt~l ~i~f~aHlNVRS(lZR,JZC)/M(t 1 l)
1012
00
01
R11t,N
t6NTJNIJ
~tOtt CONTtNU
CALL CO XMP(M,N,MJNVRS,N,N,N,N,PROO,N)
RETURN
nfaUG SU8CHt<
8
g
c
~
~
c
c
E~O
SUBROUTINE SlRCLB(w,wQf~'MINVR8 1 WTCONM,WOPT,WCLB,NBITS,RN,
+
A,PS CLR)
THIS ROUTIN! WILL CALC
THE LA~GEST C~RRENT LOWER BOUND FOR
THE c•S£ ~HERE l~L WElaHTS lRE CONStRt ~EO TO OlSCRETE VALUES.
T~E ASSOCIATED ~EIGHT VECTOR IS ALSO 5 VEOe
IN AOOITION~ THE ASSOCIATED OPTIMUM WEIGHT VECTOR ANO
HAXIMUR SIGNAl. TO INTERFERENC~ RATIO &RE CALCULATED 4ND PRINTED
~(NLN~ 1 MtNVRSCNLN)~W(N~ 1 WCL8(N) 1 WQPT(N) 1 ~Q(N)
oOfMENSJ8N
MENS N WTCu~RlN)
1 A(Nl 1 HN(N)
COMPb~••t6 MtHINVRStWCLA~WOPT 1 W~wQlWTtONM{.Wt 1 W2
I)OIJS
PRECtttiON A,~JRNUH,SIRuEN,SIR,~SIC 8
CO~M
~,L
ooooJt
OOOOJ1?.0
1)1)(1()31.~0
(1000llUO
lH'P)O~,~O
DO 1000 J•ltN ·
M(JtJl • M(J,J) + PQ
1000 CONTINUE
c
oo Into INDEXat 1 N
TH( NOF.X)cM(JNOt~rtliM(t,l)
I 0 l 0 r. miT I NUE
"4Htf:aN•t
00 1020 NtNOat 1 NHt!
N~NOPt•NHto+l
R NlNO)•fH(N!NDPt)
1020 CCNTJNUE
.
CAlL
ooco.,o~o
(it)I)Q;\QJII)
CHHJ 0 .~ 0 A()
t:' 0 Q 0 ~ lYHl
(>t.)
~0')•).~110
t'OQO~H~o
(I ()() 0 -~ l
'f 0
oono:-\HIO
(II)Q 0 j l ::t (.l
0 0 ~ I) ~It?. fH)
(10(103~\ 0
00003220
tjr,-()0~~~10
1)00\).~~?f.~Q
tf0003?cso
'.){H)•)l2~0
('OOQ'V'IQ
OOOOJ(!AO
1)000;\;(i)\)
oooo~.1no
0000;\1!0
~OOQ:lil?.O
oooo:\:no
oogg;~
""fl
\1
"l.t.tQ
~~-··1·{1
• .~
.:iv
('OQ\1~~ . ~~0
0
1)()0().~~ ~
00003:\~0
0000!~~9()
1)000:~40(;
OOOO.~IH Q
ooooltl~O
C01i03a3o
OQQ0!.4LI')
0~00:4811)(>
Ou0031J60
OOCO;~.t.! IQ
OQ(}O :i!.IJ8(1
OIJOO:~tJIQ()
oooo:;soo
000Ct.~51 0
0000 ~f)?, I)
OGOO~~:do
00003540
0000!5~~?
00(ll):a;$h()
0000l510
, 0 Q 0 :\ 5 ·!H'~
0000:\5()()
\0
1-'
C INJTIALIZ! 8EED 'OR RN GENERATOR IN W!IGHT SUBROUTINE
c
c
4)001)1600
(\I)') r,<;, t Q
ooCliL~ f;: .2 0
15 • 5
_,OC1 ~:;f:L~0
t<R • 2
PSICL8 • o.o
c
00 700 I11 1 KR
c
C GENERATE A WEIGHT VECTOR FOR ALL WEIGHTS CONSTR4INEO
C' T.. lS ROUTINE WILL G~NFfhTJ:: ONE ~EIGHT VECTOR W
CAlL Wf.IGHT(.,N,~BIT~,RN,tS,w)
CALCULATE THE CURRENT LOWER BOUND FOR THE SIR * * *
CALC. WCTRANSPOSE•CONJUr.ATE,•WQ AND
C
WQ(TRANSPOSE•CONJUGATE)•W
oooo:o\hHO
0000!,.1-,~0
~,..1 nt'lo"\',.:. c"'
. , . . . vv .. l-~.,~t.:'ly
ovoO:!·t::.'iv
OOOOJf,RO
')0-::'03tf.,(JO
~ oQc<~ "(u)
0001).~1tO
8
o~I(I('I:~;P,o
~Jooo
~J.o
oono:~TtHl
OOi)rJ:~ '1t:•O
.n
E
c
c
~
c
E
c
~
E
c
~
f
c
11111
•
('0003'1~1)
oooo:.;7·7o
co,o,o,o)
<:t 0 0 <L~ i' !Hl
0 (1 (l 0 .~ i' f) 0
(i (,\ I) (I .HHI 0
(1000 !~Fq 0
00 100 llat· N
.
.
Wt ~ Wt + ofONJGCWClt))•WQ(It)
100 CONTINUE
NUMERATOR 0' SIR • Wt * W2 (R!AL) SINCE M IS HERMITIAN
SIRNUM • WI * DCONJG(Wl)
CALCULATE THE DENOHtNATOR ,OR SIRCLB • W(TRANSPOSE•CONJUGATE) •M
~0\)0Hl~Q
OOOO~oAJO
0000 :".P. t!O
OOOOJASO
t'O 00 ~H\60
*
()000,~·~'10
w ~(H)03ABU
Ot100 ~P.90
1)0("J3':;oo
CALCULATE W(TRANSPOSE•CONJUGATE)
on
2oo K•t,N
wTCONM(~) 1(0.0,0
200 CONTINUE
oo
00
4no
300
*H
oooo .'~(? 3t')
(,\() 0 (} J t;
1
0)
t<at N
12t~~(,.N
WTCONHCK) a wTCONHCK) + 0CONJG(W(I2))•H(I2,K)
300 cONT}NtJ!
AOI) CONT NJE
CALCULATE W(TRANSPOSE•CONJUGATE, * M * W • SIR DENOMINATOR CREAL)
S!RCE M IS HERMITIAN
SIROEN I o.o
00 500 K•t!N
~O(H)!,q\ ()
0(\ I) 0 .~.::h: {)
SIRD~N • 81RDEN + WTCONH(~)*W(K)
500 CO~TINUE
E CALCULATE SIR(CURRENT LOWER AOUND) CREAL) SINCE M HERMITIAN
~H)
OOQQV;l~'d)
0000~~~()
ooo'.>!· 9 ·~o
,.,~o:r.c:~o
~OQO.!i'990
oooo«·.H>Q
0001)1.1()10
OQQ()IJQ(!O
l)nooao:t;o
00().()4{ilfA0
OOQOI.IOSO
OOOOi.iQ~O
00001!0"10
('00QIJOfiO
~4)00I!OOQ
OOt'JQtq hO
~oooat,o
('00014 120
t'OOOIJL~O
ooooat«O
\D
N
c
SIR • SIRNU~ISIROEN
~ fiNO LARGEST CURRENT LOWER BOUND roR SIR AND THE CORR• WCLA
C
I' CSJR.LEIPStCLB) GO TO 700
c
PSICLR • S R
oo
w LAolot() K•t,.N
• w( K
600 c8Nt NUE
)
no
q~g K•
WOPT~K)J• ~OPT(K) +
~8~lt~H~
00
~
1·, NN
:38
t)()
•
0 0 (} 0 iA t 'I 0
(\(H'IQI.l~@.Q
(10(! 0 IH ~0
{II()QI)IlJoo
0 tl 0 {) '~ if. i I)
OQO Oll;?~IJ
()0(.~~1.1~31.'
000()/J;.'l/l(p
ooo?4.t:•:;o
C 700 CONTINUE
~ CALCULATE THE OPTIMUM WEIGHT VECTOR , WOPT • MINVRS
00 A~O Kat N
WOPT K) • fo,o,O.O)
800 CONt NU£
c
ocoo~t ~.o
l.)()(q)I,\~~Q
oo
*
WQ
Q() (!. ~hQ
(\0\')0l.tP, ]l'j
0 0 ('H') 1..1 ;;> Pl 0
(\ {) (i I) /.J. t~ q 0
OOOOI.t!{-00
<H'~!I).~t3
1)00(1t13].0
'··· ;.) ··:< \•
HINVRS(K 1 1)•WQ(J)
it'
()()0(11,\?.i!()
fA
l ao
{\ 0 I) 0 1A3 5 0
,'• ;"l(l 0 /.A -~ ~ 0
QO\H,IB./0
()o()OQI.A3::\()
l){n)OLI3c::IQ
oOOOtJIJ.O()
(\C)\)QlJI..ItQ
CALCULATE THE MAXlMYM StGNAL TO INTER,ERENCE RATIO OVER THE CONTINUUM~.oo~aa?.o
UPPER SOUND (NOT C UALLV USEO)
oOOOLI~JJ<>
f..'()Q(I.:A/Hl()
() 0 I) 0 tAIJ '5 (1
SIRMAX • o.o
c
OOI'IOIJ.IJ~O
DO lOOO ~at N
000?4a7o
SIRA4X • SlAMAX + DCONJG(WQ(~))•~OPT(~)
OOOCLia8o
1000 CONTINUE
ooooau~o
~QOOLIS~O
PRINT OUT WCL8,PSICLB, AND WOPT AND SlRMAX
~OOOLI5io
nooou~:?o
WRITE
l) PS!CLB StRHAX
oCOQUS~O
t FOA:M~T IH t'OUTPuJ rROM stRCLB ROUTtNE•-.•*''''
tHh)O'.!~·iLIO
+
PS CL8•' ~16 t0,5XlfSIRMA~al,Fth tn,/1 1 • WCLB't}OX tWOPTt~oooaS~O
+
L sox,•~Q•,tox,fM•,tnx,•N•,to~,,NRtYs•,t~x,•PsiCL~ ,t&x,
ooooasho
f
~
~
~
c
c
c
c
(t
•
'StRMAXl,l)
wRITE
WRIT€
<t•*)
( '*)
00004510
WCLB,WOPT 1 WG,N,N8JT5 1 PSfCL8 1 SIRMAX
WC~e,WOPT
1 WQ,N,N~ITS,PS C~Q 1 SlRMA~
RETURN
t'tRUG SUBCH~
E~O
('l()O(lilSP.Q
oOooas~o
00004600
OOO()L161 0
c.t.h) o L\ 6 .:> o
tl () () 0 1..\l:d 0
('()Q()L!6tlQ
(! () 0 0 IJ As Q
SUBROUTINE WEIQHT(A,N 1 NAlTS 1 RN,IS 1 W)
000()1At,~()
OOfJQI~,;~/0
t)OOOl!i:\f\0
0000/J~QO
1.0
w
c
c
THIS RO¥TINE CALCULATES ONE SOLUTION VECTORi w1 FRf.IM THE BOTTOM
e or THE ~EEA EACH ElEMENT tN W fAKES 0~ A 0 SCRETEr
COMDLfX VALUE
c
NAilS • Nu. ()F Pt-iASE' ~HifTER RITS
c
c
c
~c
~
~
c
~
c
00(H)L1170
!)00Ql1'1P..Q
() Q 1,) 0 tA I' 9 I)
00 {HJ (,;\ fH'; 0
OOOQtH~
000()1..\P,~I)
~ " 0 0 J,q l\ (l
t) 0 tH) IH\ ':· \l
OOOQ4B-':<~)
(\ I) ()I) I! fi; 'j' ~
w
000(11!.'\80
00 ZOO K•trN
CHOOSE W(K)•AM CAM TAKES ON VALUES BETWEEN I AND 2
DO lnO ~t•trNVAb
··
JFCRN(K .~f..CFL ATCLt)IYAL)) GO TO 150
100 CONTtNU
Q()t~OilAGO
**
N8ITS)
c
~
c
Q0t)OI49t')0
(' ('HHJ lJ t) 1 Q
Ot-QOlit?.~o
000 ()liGoJO
(I () {I 4J iA q. !Ht
'='Q()('Jt.ie:p'SQ
oooo~4~qo
I)()')Otl")\JO
{'II.)QQt:.060
150 RETAK ••CFLOAT(L12 * 2eO*PI)/FLOATCNVAL)
W(k) • A(K) * CO~XP((0 1 0rl 1 0)•8ETAK)
200 CO~TJNUE
Oti(lvSoP.o
300 CONTINUE
()t)OQ~
('t 0 (} 0 ~~ ~ 7 'J
OOO<;:.:;(J9Q
oooor;.too
1t 0
(J00U5\?.0
f)tAUG SUBCHt<
c
t0
oooot.1.e2o
R(TlJRN
c
nco
('(,1()()/J '7';~\
(H)()()/l'i't!-tiJ'
DIMENSION A(N) 1 RNCN;, W(N)
COMPLEX W•1&
OOUBLE PRECISION BETAK 1 4
0-TA Pti!.I415Q2bS4/
NVAL • 2 ** NHITS
VAL • NVAL
GENERATE 4 SEQUENCE OF N RANDOM NUMBERS
CALL RNOUNCIS, RN, N;
CALCULATE N EL~M£NTS OF THE VECTOR
0000l1700
0()00471'.'
(' (\!)(~ IJ_ (' ;r IJ
'~ f.A l s. n
i) 0 t) 0 /J i !J 1)
oQOotit:~O
E~O
()()~I.)S1.Ll(\
0000':'11?;1)
SUBROUTINE ANGLEC80PT,NML 1 ANGLrPI)
OO~H)t:,1
AQ
OCHiOS17t~
COMPLEX*lb ~OPT(NML)
ONLV ONE WEIGHT IS USED AT 4 TIME
JF(REAL(AOPT(~)~ 1 Nf. 0 1 0) GO TO 50
F(A MaGCSOPT ' J L u O) AN~ • 1 5*P
~F
(1JMAC(80P ( )!,!t,6 1 0) ANhL a &
JF(AIHAGCf\OPT 1 1etO.u,u)
WRITE (o, 1)
r,o ro too
50 ANGlL a AtAN(AIMAG(BOPT(l))/REAL(BOPT(l))'
_
IF (AtMAf.(B0P't(1)).LT.O.O) ,.~H'.>. (Rf.Al.(fHIPT(l)).LT.O,O)) ANGL*
+
ANr.L+PI
,
JF((AJMAG(BOPT(t)).GT.O.O).ANO,(REAL(BOPTCt;).LT.O.O)) ANGLa
+
ANGL.+Pl
s.JI
(tCH}Qt;~~()
coo or;~ fJIJ
0 !'H1 0 t~ ? 0 0
()~\()Qt"·2i ()
0000~220
~1.)0(1\),?.j()
OOOC';~2~0
O')t~O';?.St;t
OO()Ot;}~O
tH) 0 !> S 2 'I 0
t;'OOO~i~ll.l)
oocos;;Hjo
ooooS.~(to
~ooo~:.to
1)0005320
\.0
-P-
c
c
~
C
C
c
C
~
c
c
~
~
c
tF (ANGLeLT.O~O) ANGL•ANGL+2•Pl
tOO CONTINUE
l FORHAT(tH ,•REAL AND IMAG. PARTS Of WOPT BOTH ZERO••ANGLE RTNe')
~!TURN
O(BUG SUBCHK
00005310
SUBROUTINE RlR2(t,MDtM,ANGL,Rt,RZ,PI,SEQ,INO,N)
THIS ROUTJNE CALCULATES THE R'S FOR ACR,(Ra1,,~. MDlH)
R IS THE NOE~ INTO THf Al.b0W£D VAl.Uf!J f"W>. THt Wt,1 IGHTS OU£ TO PHASE
SHIFTER BITS P. IS ROlJNOI!D P trJ tNTF.GER VALUE
.
SEQ DENOTES THE: OIREt:TION (•taCLOC~WlSf: •NO +t~ncOUNTE'R CLOCKWISE)
FOR THf A8SjGN~ENT 0~ VALUES FOQ HIGHE~ ORDER Nt5
THESF. VALUF. ALTERNATE Cw AND CCW ROUND THE CIRCLE FORMED BV
TH~ VALUES
OR A(R)
INTEGER RtUU 1 R2(N),SEQ
C • FLOAT(MD!H)/f2.0•PI)
Rl(f) GIVfS THE CLO,EST AblQWED x•.bUE A(R) TO tHE w~IGHT W(lt)
0~(\2~/J 10
ooovS420
E~O
R2( ) GtVF.S tH£
S~c~•NO
CL. SESf V l. E A(A) Tfl THE WEIGI-lT
~(I1)
Rt(Ii•AfNT(C*ANGL + 0 5' + t
IF (RI( ).GE,(MOJM+t)J Rl(l)•Rl(t)•MDIM
IF((C*ANGL)•(Rt(l)•l;) 210 1 220,220
~ THE AltOWED VALU£ FOR WEtGHT W 19 LESS THAN THE CLOSEST INTEGER
C HULTIP E 0' THE FU~OAMENTAL ANGLE DETERMINED 8V THE PH~SE S~lFTERS
ItO R2(Il
(11• l. F. •
8
t F" ( R2..
AEQ • •
so·to 3
C 2ZO
c
~
('1)00~:~~0
C000t;~10
00005~HHJ
"O\JO'lii~ 0 0
OOOO'?ltiO(I
0 0 (,!> () ~ fj §. 0
oo~osaao
0 0 (} 0 ~~ IJ ~; \)
0 0 ~)(\!;i !.! 1, Q
I) 0 0 ~)!)In'()
OOOC~I~AO
OO<'O"ii!I'JQ
0000~500
OO()()~~HO
oooo~s~o
COOOS"i$('
I) 0 I) (} '-" '5 ll ()
oooo~~s!Sc
()I) IJ (} S ')~ 0
oooor~\l)i(}
()~OOSSMO
OOOl)"S"'O
c
c
~
OOOOI:t3!!0
('()('Q!d5()
R2(t~
Rt(l)•t
~ ) Ri C1 ) 1 R2 CI ) +MD I H
o
• RtCl)+l
.
IF (R2(J).GE.(MOJH+t)) R2(1)1R2(1)•MDJM
At:Q • l
]00 tND • 0
OOO(]r-.~C'>O
0000~6,0
OOML6?0
tJoOOf>r•;~.:!io
l)()i)Q~"~fl.,l,l~)
ooocf:~,r;o
() 0 0 () S~f)O
t,)QQr,..; '1(,•
Sooo•"lhAO
O«)OOS~!:jiJ
QOOQ~;..ioO
OQ 1l0~7t0
\HHH.I ~ 7 21)
Q00()'\7~0
1)0('10'-i i' «O
001'iOr.:i7C:•O
()OOOS 'lbt)
.,()1)(),710
noooS7Au
I) t) (II) r:; ·; C'>t)
oooot;Aoo
0000~~11)
()(\i)Qe:./320
RETURN
OO?OSR10
nERUG SU8CHK
OOOO~Rao
END
o~~o5A50
sueROUTINE REOROR(NHL,N,BCONC 1 M,MC,C0 1 COCT,y,AT,AO,eo,L,WQ,coN,UNC~O~Q~~h0
+ ON)
·
00005870
\0
lro
c
OOOOSSRO
(I(~ () 0 r; p, r 'rr)
PARTITION SURROUT!NE
****
OO~'QI!'.?<'l(}
T~Is ROUTINE PARTiliONS AND REORDERS THE COVARIANCE MATRIX AND THE A ('H)OOI';J~ t 0
8
8A5EO
~ OUTPUTS FROM
VfCTO~
~
COMPLE~•t6
COMPL~~*tb
ON R CONCATENAT~D)
THIS ROUTINE ARE Ht, co, COCT, y, AT, AO,
O~H)()I'.i<7?0
BO
M(NtN) 1 MC(NML 1 NML) 1 COCNMLeL) 1 COCT(L,NMl), VCL,l)
AT(NHL)r AO(LJ,BO(L),Br,ONCtij)
tQMPLt'.X*H• WCHN)
c
c
JNTEG€R CON(N),UNCON(N)
oo too
c
OOOi'l~-i,:;:•p.()
t.)QQ()~(ftJQ
0000~0~0
AO(JloWQ(.JJ
RO(J~aACONC(J)
O(j () 0 6 0 ll \)
t<t•t
oooQ;,o '~<>
t'OOQ~'~O.~O
100 CtlNTJ.NllE
OO'J~~~\) 150
0{!001iQ~•O
t.;OI)Qiol()8Q
OOOOilOilO
l)~)t)t;h
]00 DO 5()0 t<tat,~
oo aoo l<i!•t
400 ~b~t~~~.l I ~ Kt,K2)
1500 CONTtNU~
00 700 l<l•t,NMt
00 bOO K?.•t NM
M8(Kt,K~~) -·~(UNCON(Kl),UNC0N(K2))
bOO CNT NU
oo eoo
c
(\()(H)'}I'?MQ
oooocieno
OO(H)b()lO
J•trL
100 C 'NT NU
00 ~PO K~·t,NML
cl
ooou~~?so
ooi)O~~oo
I(P•L•t
·
no 200 t<•I<PSN
ATCt(t)•WY(~
UNCON 0< I) aK
Kl1:1Kl+l ·
200 CONT NUE
c
('!()0(1:~9~~0
0 () () () 5 q l4 Q
K .at
CO(~t,l<2 •'k(UNCONCI<t),K2)
800 CONTINUE
qoo CONTINUE
DO 1100 Kl•f•L
00 1000 K2• NML
,
COCT(Kt~l<2) ' DCONJG(C0(~2,Kt))
ooo tO~TPW
100 CUNTlNU
RETURN
n ~RUG
0 C::HUG
Et-H"'
SURCHK, INIT(HC,COCT,C0 1 Y,AT,AO,BO,CON,UNCON)
SUBCHI<
SU6ROUTINE SIMAX(NML 1 L,MC,CO~COCT 1 Y 1 ATlAO,an,MCINV,PROD,
+
MC
NCO,VOUT~
1
VOUT~ 1 V3,U,v
1 At 1 P8XMA~,aNt)
1 0()
()(H~\Jb 11 0
Oi.Hi0~1t)O
() (1 {)I) b l .'.¥: I)
(11)(\i)bl t!()
0')1,.'11)1, ~so
00001,,~·1,)
(}(1(){)()1 'i" 0
OCH!Oll'IU1 0
0 CHH~ ~ 1 q t'l
(t00\H•200
0~)('(}~2' 0
O:')(HJ,..•??.O
('Ql'Ob2' F·O
()0 () ()r:O,j? lll)
()00062':~0
0 0\10 ~.·2 'i-·(1
(,H)i')0~2ll)
00006?.110
0000~?.'91)
o<H~o~:;!"'o
cooon:H o
02\'t~~~;.;o
Ov00t15
••·0
Q()(H)~~iiQ
0¢ lj (ttl:, 3t:;Q
0 (I 0 0 t,:~ ~n')
OOOOI'l·~·;o
I) I) 0 0 I? r•}'l 0
000 \~~ }~,n 0
0 00 (I ~LHH)
000064~0
oooo~ur.o
1.0
0'\
C
~
c
c
c
**
I
PSIMAX CALCULATION SUBROUTINE
HIS ROUTINE CALCULATE~ THE MAXIMUM SIGNAL TO INTFRFF.RENCE RATtO
T ALSO OUTPUTS U,V, ~ND At TO AE USED IN HOPT CALt,CSUBAOUTINE):
REAL•& PSIMA)(
CUMI't.f)(•lh M~(NMLpNML' 1 COCNM~rL) 1 COCTCL,Nt-4t ),VCt.'-L)l
+
A f NML ) , A 0 u, ) , f.\ oc ) r u t N~i L ) , vCN "'L ) , Dp., ot>1 , . 1, NuMF. R,
• ATCU TM(tOll flNi(f'H-ii..,M-1~) R too,
COMPLE,~Ib MCfNV NMLtNML (~Q(O(NHL,NML),MCINCO(NHL,L),
~*
c
+
VOlJTt L),vOliT .li,.),V:Ht,.),SOCTAO,vCTAl
INVERT MC AND VERIFV MC ~ MC(lNVERSE) • I
JFCL.NE,(NML+L•l)) Go TO 101~
~ ~~x(,qi) a 1,/MC(J,I)
8
l0l5 IF lL,NE (NM)+L•~)) GO TO !000
O(NI~aMCf!'' *~Ctit2)•Mt.Ctr2)•MC(2,t)
MCINV!t,i eM,(2 ~ /OrNIM
M NV
it ••MC(
.)/0 ~IM
M~INv ~:, ·-~cc 't)/o~NtM
~C NV ~t2 •MC(l, )/DENIM
GO
qq
1000 00 ~ 0 NOEXat NHL
TM( NAFxJ.,..c,IN6tx,t~IMC(t,ai
1010 (":ONTtNUE
Nfottl:cNML•t
00 1020 NlNO•J,NMlE
N~NOP211NINO+t
R ~IN \cTM(NINDPt)
1010 CCNftJUf.
CALL ZORN~R,MCINV,NML)
on 101 7.Rct,NM
Jo
0000~/J~O
oovoe£4 'fQ
OOOO..,IHH.l
()()(HJ~ltQ(l
OOOOb'SOt}
(1000~5·1 0
()e)(){)!'-it.?o
(I I) \) () ,(~ ~, ··~ I)
Otlt\0~~,)~0
OO{H)t,";,t;o
00006~~6 'I
OC0\,6St,?.
l)(ii)Qh5~oJ3
0 ~H.I 0 t, S61J
QOOQ~Sk6
000Q61)~'1
00006~!'.:;13
000t;'lk5~Q
('J0t)Q6'571
00tJQ.,S1?.
O{H.)\)P..~;·;tJ
Ot)006SFiO
()Q0t\bS 1~0
OOijQ':.~OQ
0000h610
QOOIJi:l~?.O
0000f.·fi:~.i)
OOOOoouo
~OOQt,~SO
OOQOQ6b0
0
~l
~o~or~tJLIO
oooo!-.r..1so
oo ooe-.~)h 1)
11
~ p,rh8lf~~;~z1.S~~~~NY(IZR,IZC11MC(I,l)
012
C. NTimJ
0 I C lNT NU
()0006430
(:IO()l,)/>:.6'1(>
001J0~~6AO
OOOOM-,1'?0
·
CALL CO XMP(HC,NML,MCINV,NML,NML,NML,NML,PRoDrNMLl
C
**CALCULATE U•MC(INVERSE) •AT (ORDER NMLXl)
c
qq CALL CDMXMP(MCJNV,NMLrATtNML,NML,NML,l•U,NMtl
c
C ** CALCULATE V•MC(INvf.RSE)*CO•BO
c
CALL COM~MP(MCINV,NML,CO,NML,NML,NML,L,MCINCO,NHL)
c
CALL COMXMP(MCINCO,NML,B0 1 L,NML 1 L1 t 1 V,NML)
~ ** CALCULATE NUMER•BO(CONJ• TRANSPOSE)• (V•BO • COCT•V)
c
CALt COHXMP(COCTtL,V,NHt,L 1 NMbtltVOUTI,L~
CAL COMXMP(V,L,BO,L,L, ,t,VO 2,L,
('(.\006100
('10<t()h7t0
()0{)0.07~(i
()O,:>o~7:~o
OO'J0~1t&O
()CH)Ob7SO
0000~1~')
1)01)0~110
1)000~1~0
0000ib7Q()
('QI;('t,~,()()
(l()('O~R'
0
4)00Qei)Aj-~1)
00 0 O.f:·R :; 0
()t){}(ihbtit)
OO')Qt.f)f',SO
()00Qot,gf,Q
0000_6Pt70
\,()
-....j
c
00
t 0 0 K t • t 1. L
Vl(~~) •
c
c
c
VOuT2(~1)
oooo~BfH>
• VOUTt(Kt)
100 r.ONT NUE
NUME~ • co.o,o~o)
DO ~00 Kl•ltl
.
NUH.R • Nu~t:R + DCONJG(BO(I<l)) " V3(t<l)
200 CON INUE
c~ **
CALCULATE DENOMIBO(CONJe TRANSPOSE)*AO •V(CONJ• TRANSPOSE)•AT
AOCTAO ~C0 1 0r0~0)
VCTAT •(O.u,o.u)
c
DO ]00 Kl•ltl
80ClAO • BO~TAO + OCONJG(BO(Kl))•AO(KI)
300 CONtlNU[
c
DO 400 Kl•t NML
.
VCTAT • Vr.tlT + DCONJG(V(KI))•AT(Kt)
400 CONTINUE
c
DENOM 1 80CTAO • VCTAT
CALCULATE ALPHAt
c ** Al • NU~ERIDENOM
c
cc ** CALCULATE PSIHAX
ATCU • Co.o,O.O)
~
c
c
c
c
c
00 500 Kf•t 1 NML
4TCU • 4 CU + OCONJG(AT(Kt))•U(Kl)
500 CONTINUE
PSIMAX • ATCU + DCONJG(OENOH)/Al
CONTINUE
RETURN
OtAUG 8U8CHK
F. NO
c
c
cc
c
c
**
().,QOt'~!J,r,,o
t) '' 0 1) fi''H> 0
~0006910
.,(){10~9~~
Q()l)(\~~ :!-
8
()0006?«-H)
~0Q()t;9~0
oooo~qhCt
OOO<H.•~"HO
<H' f.l' ('H· q eo
01)01)~'-,t~QO
0 0 0 tff 0 (H)
00001010
000010?.0
t:'~HlQ7QY•O
OOOO'IOLIO
ooooio~o
M>vo1o~o
OOC070'70
~09070$()
(H)01')70Q()
0000?100
(\0()1)7
10
()0007!?.0
oOIJOi' L·~O
000071«0
QOQQ715Q
"0•!)071E-lO
00101~"10
00ir01HHl
t~OQ07~90
oooo7t-~no
ooOI)7?to
00001?~0
OOQ07?!•0
()(.\007 2t.IO
000fl7?.~S{)
oo_ oo72!.. Q
00001210
00007280
oooo7t-!.:)O
00tllj130Q
1.100(17~10
OOQO 1.~?.0
()O(.I07ll0
,()()O'I:ott!O
Qi')(I0135t)
SURROUTINE RHIGH(IND,SEQ,Rt 1 R2,MDt~,I,N)
~0007~~0
00007310
THIS ROUTINE CALCULATES THE HIGHER ORDER R VECTOR~·•R3,R4, ••• ,RMOIMe0001. ~BO
OUtPUT GOES TO Rl IF tNDn~ ~ND R2 IS FILLED tF tND~t.
00007Jry0
(t()t)l)1ll00
INTEGER SEQ,RI(N),R2CN)
(\Q0()71.110
000071.1?.0
1.0
00
c
tFCINO.£Q.I) GO TO 300
INOIO••FILL R2 VECTOR
t **
!NO a t
rFCS~Q.EQ
GO TO tOO
~;~~~(~):lt.HotM~
R2CI)•R2Cl)•MDIH
GO TO !;Oo
c
100 R2(1) • R2(1)•1
JF(R2(f)eLE.O) R2(J)•R2(J)+MDIM
~
•fJ
~
c
GO TO 500
~ ** JNO • l••PtLL Rl VECTOR
JOO tND • 0
tFSS~Q~EQ·
GO TO qoo
~~~Atttl!&r!AotM, Rltl)•Rt(J)•MDtH
J)
c
r.o
TO
~oo
R1(l)1Rl(l)•t
IF(Rt(tJ. f..O) Rt(I)•Rt(I)+MDIM
C 500 CONTINUE
c
RETURN
400
~f:fWG SUBCHK
c
~c
~
r.NO
SURROUTINE N$1MAX(BCONC 1 WQ 1 M1 WTCONM 1 N1 PStMAx)
THIS ROUTINE WILL CALC
THE LARGEST CURRENT LoWER ROYND ~OR
T~E CASE WH~RE 'LL WEI~HTS •RE CO~STRAINEO TO Ol8CR~IE VALUES.
REAL*& PStMAX StRNUM StROEN
COMPLEX•t~ M(~,N),BC6NC(N),WQ(N),WTCONM(N),wt,W2
~ CALCULATE THE CURRENT LOwER BOUND FOR THE SIR * * *
WCTRANSPQSE•CONJUGATE)•WQ AND
c~ CALCe WQ(TR4N$rUSE•CONJUGATf.)•W
c
w1 • <o,o,o.o)
c
DO 100 ll•ltN
WI n WI • O~ONJG(BCONCClt~)*WQ(Il)
lOO CONTINUE
oono?n~~
ooouta~o
ooon?~•o
0000/G~?
~0001110
600Q7U80
oooo?a?o
~OOQ1Sno
~0~07~10
000075~0
00007530
00001~00
onuo7cno
o6oo7~~o
00?07~70
oooo75Ao
on~~1s0o
00007h00
0~007Qt0
00007&~0
00007~~0
00007&00
00007~~0
coryo7~~o
00007b70
Q~001~AO
00007hOO
00001700
00007710
000077~0
oooo77Jo
000077UO
00007750
OOOQ77~~
00007770
00001?~0
000077QO
OC.Oo1~oo
oooo1GIO
~0001R~Q
000078~0
ooo~1aoo
00007R~O
00007S&O
0~007870
oooo7eeo
00d07A10
00007QOO
00007?10
000079~0
000079JO
000079«0
~00079~0
oooo7q~o
oooo7Q7o
\0
1.0
c
c
c
E
~
~
O{t007()80
NUMERATOR OF 8lR a Wl t W2 (REAL) SINCE H IS HERMITIAN
(' OQ 0 79 <:· 0
ooQoe, MHJ
SIRNUM a WI * OCONJGCWI)
OOOOi~O l <>
t"I?IJt)AO?.O
CALCULATE TH£ D!NOMINATOR FOR 8tRCL8 • ~CTRANSPOSE•CONJUGATE) tM * W (1(\(i(jf;l):~t)
OOOOP.Ol!O
OOOQBQSQ
()000~0f10
CALCULATE W(TRANSPOSE•CONJUG4TE) * M
0¢00·0.\)"fi)
0000AI)P,0
~HiOQ8Q(}O
ooooAt<>o
2~c~~~ t<•t,H
C iOO CONi~N~~) a(o.o,O.O)
00
4.,8
l<•t N
12ai,N
WICONM(i) a WTCONH(I<~ + DCONJG(BCONCCIZ))•M(l2,~)
300 CO~TINU
000 CONTINO
.
CALCULATE WCTRANSPOSE•CONJUGATE~ * M * W • SIR DENOMINATOR (REAL)
SINCE M IS Hf.RMITIAN
SIRDEN a OeO
00 500 K•tfN
SIROfN a S RDEN + WTCONH(I<)tBCONC(I<)
00 lO
~
~
c
0000A110
o~tJ\n~
soo
cO~TINlJE
c
c CALCULATE SIR(CURRENT LOWER ROUND) (REAL)
c
c
c
c
~
SINCE H HERMITIAN
PStMAX a SJRNUM/SIROEN
RETURN
Of::AU~ SU8CHt<
END
SUBROUTINE Z0RN(R,RNt 1 NPt)
HERMITIAN MATRIX TOEPLJTZ INVERSION (COMPt..EX)
COMPLEXtt& X(20t,,8NJ(NPl 1 NPt),R(lOO),RG,GAt,UGIJ
~-NPl•l
N2Pl~t2*N+l
X~I~t.• •~O 8S(R(t))•t2
)( N)II•R l)
~ N+?)a CONJG(X(N)l
NHtBN .. t
4
.
12:0
OOtH;M1 J.O
(:000All10
(~OfrO!:Ii ~~0
0~0{,1~~60
c
() 0 1) i~ i 'i' 0
OOOO~U~Q
0000~1CJO
0090A2CQ
OOOOP•,~U)
(IQQOi~??.O
I)IJOQ~I?. ~0
0000~·2!10
0000A2SO
000082~(1
0000P..?10
()0008?~1)
OOQ OP!?'1Q
OOOOA300
OOU(H~.\\t 0
(I()O~R:l\?.0
1)0¢(il~fd0
0000$o\:Ht0
oooos:,so
OOOQPr~·~:;
(IO<H;~>>:i·hQ
OOOOP..;~s
(' 0 Q0 tJ. 3'1\)
{'P)I/0~S7 1 )
(P,IiQ~3~tl
OO(HjP> §90
_,OOO~H!.OO
r.•OOO~tl11j
r,H'J 1J () P. 1.1 ?, Q
OOOOR 4.H.I
OOOOP.IH!O
00 3 Int,NMt
RGa~O.
00 4 Kat,I
0 t: of'H'! -~bO
~GaR(K)tX(NPt•L)+RG
00 1)0~490
Lwl•K+t
OOOOflll~O
(.\ () Q 0 1'\ 1.1. ., ()
OOOOf:WRO
1-"
0
0
JPt•l+l
OAX••CIHtPt )+PG)
~(NPt•tPtl•GAJIXLI
f>(J S J•lrl
L•t•J+t
ooooesoo
.
5 ~~NPt•J~•XCNPt•J~+X(NPl+L)•GAIIXLI
DC o J• ,JPt
b ~ NPt+J aOCONJG(X(NPt•J))
3 X~ll1Xl.f•(C0ASSCG•Il••2li)(LI
X NPt)•l(Lt
X N~~l)•OCONJG(X(l))
R~t trJ)atAIX(N+t)
oo .o x~s, ...
JaN t•I
ANtil•~,t~aX(J~IX(N+tl
20 ANt l 1 +J).•OCONJG(8Nt(l+t 1 t)~
00 2 •t,Nt.4l
tMteY•t
no 22
,hat r t
UGJJ~XtN•Jui)*X!N+t+J)•X~2*N+2•~)*X(J)
22
24
6~J~I•t,J•l
~Ni J+I 1 I+~.
•AN CitJ\+UG JIX(N• )
•DC NJ~(RNt( +t,J+l )
oooo~:;(;~o
00il0.111·600
('(10(1861 1)
()(}00"'~}~~0
0 0 6 0 gflt :~. (t
(' I) Q {) 8 £dH.)
(!OOO~h~·!)
cno~H~6ho
ooooQtj~,·~o
., tHl p, eo
~~.,
OOOOAI,'~')
(.I.(H)QH'I(i()
END
Q0008?7()
SU8ROUTIN~~ ARFACTtN~wCLA,WOPTcWQIJHETAJtTHfTAS)
(\\:l(i(IW;''~~
FTP9 tAI)tFfPT 1etl,FTPQ(I8 ,~,LAMADl
GD Rt~OMTt~n ~
CUHPLEX•Jb ~U~RtsVMTLSUMQ 1 TIAtTlT 1 TIQ
COMPLEX*16 WCLSlNI,WuPT(NJ,~QtN)
L~MJ3()A•l 1802'>
Plw3 1 t41~q~65t.t
~O•lsO.OIPo~
0~•1 OlRO
RlAL•~
(}0()€)~720
00t'()87.JQ
04)•30Pli'40
onooR7So
000()~7~()
(!OOOR]f'•l)
ij i) 0 0 8'1
'? s
0000P.7lHl
~)00087BS
()i){l()P.'/92
00001~ ?95
0 Q 0 (l r-~ ·'HI ()
('H>v08i:i.1 t'
ooot;RP.r"V
0 0 <HHHi :!? 0
t<ra2,3•PJILAM8DA
001J()P.i1,t10
tPt-~so
PH0::~~0
0 tlt.i 0 ~HV~';J 0
10
Pl-i~O u
FMA~~D0e0
J'M~XT
II 0.0
GOtlO~H~IbO
oooo~Rgo
0001l~P.95
Of)0(lH900
I)IJOO~«J!tJJ
QO~OH'?O'i
'MA)(~ • 0.0
()(JJ l () J •• ' 181
onOOiYH {)
THO~Fl.OAT(JJ)
000 QP.I') H'
J •J•t
c
OOQ08S~I)
•i•"'"'
~~lt};J~=~~A~~~t;~rl3,1,,
·
RETURN
oo a
R~AL
c
QO(!OR'S~Q
() () 0 (} "". t; .,, 0
000()"11 0
OEAUG SUBCHK
c
Q0 !J I) ,(1, ~; t ()
0 0 () 0 ~:\ ' :) i? !)
I\€) OOP.5 JQ
... ' ,,~ (' p, ·~ !.1 ·\)
A(>
I; -.gr~"-~.r.
'1.1 ,, ,, \! . :;) ., v
THaTHO•OR
suMa.co,o,o,o)
SUMT
AUMQ
11
,o 1 0r0t.O)
a(O.u,o,u)
(\{HJO~<J;tO
OOOO~{';)f.h)
OOOOW)'~O
000()H'7h0
OOOOA?bS
00008'HO
I-'
0
I-'
CTaCOSCTH)
00 15 Nl•l,N
000()F.IQAO
Qf\(~4)~~?~0
N~IJNt•l
Tt8=W8LBCNt)•~~OS(PltNN•CTl+(O ,t )•S~NCP~•NN•CT))
Ttf•W PT(Nt)• OS(PI•NN•CT +Co• ,t:\•S N(P *NN~CT,)
TI~•WQ(N•)•(Cf (PI•NN•CT)+ o., 1•)•SIN PI• NtCT))
StJ~T a StJHT +TtT
SUMQ • SUMQ • TtQ
15 SUMA~tSm1"•TtR
JF(THD 1 NE.C~OaO•THF.TAJ)) GO
34
~OBAw2u.~•OLOb10tCDARS(SUHH~
GDHTcZO,O•DLUGlO(COARSCSUHT )
GORQ•ZO O•Ol0GtOCCDARS~5~1MQ ~
W~lTF C~t*) TH!TAJ~Gn9n~GO~T GDBQ
34 JF(tHO,NE.C90•0•TH~xAS) ~0 fo 3S
G0BAw2u,O•Dt0h10(~. RSi UH~))
GO~ 8~0 O•D OGIO
A~S AUHT)
JO
c
35
GDB~a2Qi'O•DLOGto~
BAR~ SUMQ)~
~~~T~ C '*) THF.TAS,G0~8,GOBT,GDBQ
CONTINU
FTP8(J)•C0-8S!SUMB)
FtPT J)wCDA~S SU~T,
FTPQ J)•COAA~ SUMO
FMax1•AMAX1CF
~~AXf•AMAXt(FHAXT,FTPT
~
,MAXO•AMAXt(FM4XO,FTPQ S
10 CONTINIJf
,~~N a 4MAXf(FMA~BtFMAMT)
FMXN a AMAX CFMXN,fMAX~)
WRITE (~r2) FMA~ij ~HAXY FMAXQ 1 FMXN
,
.
2 'ORM4T (1~ 1 tFMA~~at,f't~.a,ax,tFMAXTat,FJ2.4,tX
1 tFMAXQQt,Ft2.4 1
+
'M trM~~-t Fl2 hl
CALL AP Of(FTP8 1 F~XN,,TPT,,MXN,FTPQ,FHXN,PHO)
.•xs,ltPBi~,~
S t:Ot..ITINU
~ETUAN
Of.:RUG SUBCHK
(Nf)
c
~UBROUT~NE APLOT(VB VBMAX VJ VTMAXtVO,VQMAX PHOl
PEAL VA 1bi),Vf(~btS,YQC3Lt !THO(l8I),F8CtA(),rTC1At),FQ(181\
C4L!
on oPt..Jr:tTt t8t
THO J)zl~6AT(J•~t)
TF
~ .J
A l?., A
~~f~~~·~t•O*AlOGIO(YB(J)/VBMAX)
tr(FR~t~~·J +70,0)
2,t2,tO
FACt~ "J)•• o.o
U£.
1o CONTI
oo
?.ll J•~,tet
tF(VT J) 1~,24 t&
lh fT('8~!~J •~o,c•lLOGlO(VT(J)/VTMAX)
trCFT IB2•J)•70.0) 2a,~4,20
8
2
24 FT(t8."J\••70.0
2.0 CONTI UE
00<>v'';)oon
~!il)(l.YI) 11)
''V0(,9!H J
0000901?.
Q0QQ9(H :;
0000q011'
ooooqo2o
I) () () Q ? I) U -~
00009<)1.14
I)OOO'IOl.lS
O(){)(}tf(.ll.lh
OOtlO"~OlJ'/
t)i(}{II;)<:J(IIJP,
(q)Q()9C~·<'t
OOOCOifJ'H
no 0 ()'?(l Sr!
1
0(Hi 0
it 0 G 3
i)OOQl.JC:O'!i'
1
(\(j(l(l(J{.It"l\\
()()4)Q9070
0000'H17.?
000()q01~
I)I)QO<~o<?IQ
00009M~~::
OOOQQ(l~tJ
fj()Q()'?(iry()
t.HlOO"'?(i~P~
~t)vO"i0:)9H
OtHJ2'~(l 0(\
(}0lHJC;I11€>
"OO()q~~~
Ol)liv'i''A
~
s
01HliJ(~1?0
i)~{)()(/1$(~
ij;(li.)Q'?L~S
OOOO<i1Lit'l
(\{}(l(l<f ~ C_;(;
00(' Qt;~ ~ hO
OOOOCii '/()
OC•OO~
1 "1'5
('(,0()9 ~ <'l(l
0000'1~?00
O(H)t~02 t (l
(!0009?~0
O<H)OC>i?!lO
00009?!lQ
OOQI)9?HO
ooGo9e:a 1
oooor-:•,,..p,i!,
000092·.o.L!
OI':IO()r,::~?H~i·
(\()t)()(/,?P:.\f.,
(I Q? t~ p, 7
oo
.......
0
N
oo
too J•t.tel
~~~VQ(J)) 80, 10
ooooqzqt
AO
OOOO'i2~3
80 tQ t8~•J)a1-~,n•AtOGIO(VQ(J)/VQMAX)
tF frh tEI?.•J •7o,o>
120 FQ(lA2•~)•• 0.0
10
,NTINU
~o,
OOOOQ2QQ
120, t.no
O+~~LLqCP 0T,~J~~~Dif0t3f'1~ITA
COEGREfS)•,ts,7.o,tGAIN
CALL f~L~f>-ci,TH6,t6.Q,fTHF.TA CDEGREES)t,t5,7.0,'GAIN
+
91t8t r:AS
CALL ~PLOf~it,THD,tO;o,•THETA COEGREF.S)t,t5,7.0,~GAIN
+
9tl8t F )
.
CALL ~PlOf2 t 1 THD,IO,O,•THETA CD£GR£!S)t,t5,7.o,tGAlN
+
q,_tet,F ,
1000 RETURN
I.'E:OUG SU8CHt<
END
(tt)OQ9;?Qfj
OOOOG'.?.Qb
()()Q ~Q~'-)f
(08)' 1
I)I.H>093?0
COB)•,
(0B)t 1
CDB)t,
()OOQq~;i~
tHJOf.l9'~2
t
t'OOQ9;l2'~
(';0(!(19!,~ I
00009~78
()()(t()Q ~HO
()i'JQQQ3)t
OOOOQJJ:S
OOl•OQIJOO
OOOOQtHl l
1-'
0
w