A032 RESERVOIR OPTIMIZATION TOOL FOR RISK AND DECISION ANALYSIS
advertisement

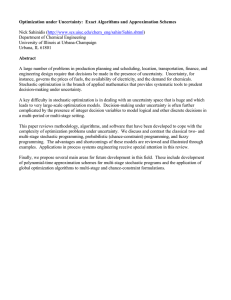
1 A032 RESERVOIR OPTIMIZATION TOOL FOR RISK AND DECISION ANALYSIS BENOÎT COUËT, WILLIAM J. BAILEY, DAVID WILKINSON * Schlumberger-Doll Research, 36 Old Quarry Road, Ridgefield, Connecticut 06877-4127, U.S.A. * Efficient Solutions Inc., 311 Ned’s Mountain Road, Ridgefield, Connecticut 06877, U.S.A. Abstract A software tool is described that enables optimization for maximizing the asset value of a real reservoir, both with and without uncertainty. Modular architecture allows examination of different objective functions, optimization schemes and financial models. The method generates an efficient frontier for risk and decision analysis with the goal to maximize asset returns while simultaneously mitigating the risk. The tool is demonstrated in the context of a field example optimizing for Net Present Value. The results clearly demonstrate the utility of such a tool for value-maximization in planning both near- and long-term time horizons as well as providing the necessary foundation for marked asset value maximization. Our contribution from previous work on the same subject is that we have combined in a single mathematical framework the possible treatment of uncertainty, being either physical or financial, with optimization algorithms for reservoir optimization, and that this platform also contains the necessary tools for risk and decision analysis. Introduction In this article, we demonstrate an application of asset value maximization through optimization of an existing infill program for a mature real onshore oil and gas field. We optimize a historymatched reservoir model and provide confidence levels under uncertainty by generating efficient frontiers. Application of search or optimization algorithms has been the subject of numerous studies and articles both inside and outside the petroleum industry1-14. Following in particular the work of Raghuraman et al.1 this article considers a real reservoir and attempts to maximize its value by analyzing various exploitation scenarios. This article first describes the main features of the software tool: the overall methodology and different optimization schemes. It then applies the optimization process to the field example. The main objective of the study is to maximize asset value, with and without the presence of uncertainty. The efficient frontier is discussed and its use for risk management and decisionmaking demonstrated. Methodology The process of optimizing a reservoir, under the assumption that everything is deterministically known, is relatively straightforward. One may want to extract the maximum fraction of oil and/or minimize the water production or maximize the net present value (NPV) of the oil produced, by optimally controlling various operational variables (e.g., individual completion flow rates), all the while accounting for physical constraints (e.g., single well production or pumps/valves limitations) and economic constraints (e.g., drilling, logging or stimulation costs). However, the 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 2 presence of physical and/or financial uncertainties elevates the problem of optimization to the level of a risk management problem. A software tool has been developed with an easy-to-use dialog-driven interface that encompasses the necessary elements to perform reservoir optimization under uncertainty and to provide the risk analysis necessary for decision-making. A detailed description of the process, with an example on reservoir monitoring and control, is given in Raghuraman et al.1 Figure 1 shows a schematic of the algorithm for a problem with uncertainty. Figure 1 – Algorithm schematic for a problem involving uncertainty The control (or operational) variables can, essentially, be chosen to be anything contained in the reservoir simulator input ‘deck’. We have considered liquid flow rates at various completions, flow-head pressure, and multiple ‘action’ parameters, which act, for example, as triggers of a shut-in when too much water is recorded in a given completion. These control variables, which the optimizer algorithm modifies in its iterative process to achieve an optimal objective function, need to be distinguished from the uncertainty parameters. Those contained in the reservoir are effectively uncontrollable and most of the time not known precisely or even to a good accuracy. They may include the pore volume, fault transmissibilities, the permeability or porosity (regionally or field-wide), the productivity index of the aquifer supporting the water displacement for oil production, etc. Similarly, there might be many financial parameters that are uncontrollable and known to vary randomly in time, oil price being the most obvious. The methodology to sample the various physical uncertainties provides the user numerous options. One could ignore (or not know) the actual distribution of an uncertainty parameter and use the input from an expert as to the upper or lower values of the parameter, both with equal probability, or similarly use the upper, lower and median values with equal probability. If a probability distribution (e.g., normal or lognormal) is given for the uncertain parameter, the user can then choose how many sample points n (and their weighting scheme) to use to represent that distribution. Correlation between uncertainties can also be accommodated. With m uncertainty parameters, this requires calculation of N = nm reservoir model realizations. Since these realizations represent independent reservoir models one could then distribute the calculations simultaneously on various computer processors. This can be achieved using a shared-memory multiple-processor computer, a cluster of processors, or even a network of independent computers. The system works on Wintel as well as Unix platforms. In our examples we have chosen to optimize for the post-tax and royalty NPV of the reservoir through the same utility function defined in Raghuraman et al.1 and Couët et al.2 i.e., 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 3 Fλ = µ − λσ, where µ and σ are the mean and the standard deviation of the collection of N individual NPV realizations as appropriately sampled, and λ is the risk-aversion factor. This utility function implies a maximization of the mean NPV simultaneously with a variable-importance minimization of its standard deviation, depending on the user’s own risk aversion (preference). A set of λ will hence determine, in the (µ, σ) space, an “efficient frontier” maximizing µ for a given σ or minimizing σ for a given µ. If we were to consider a large random sample of possible control parameter values, and for each sample calculate and plot the mean µ and standard deviation σ of the samples, then the efficient frontier would be the “North-West” envelope of the cloud of points so generated. From the risk management point of view, the various risk-aversion factors may be roughly considered as equivalent to a percentage confidence level1. If, for any set of control variables, the NPV values were normally distributed, then this would be precisely true. Considering λ = 0, there would be a 50% probability that a realized NPV will be greater than the mean F0 = µ, so the best median (50% confidence level) would be obtained by maximizing F0. Considering λ = 1, there would be an 84% probability that a realized NPV will be greater than F1 = µ − σ, and so the optimum 84% confidence level would be obtained by maximizing F1. When the NPV values are not normally distributed, we may consider the efficient frontier to be a one-parameter set of control values (parameterized by λ). This set is preferred because its members maximize the mean for a given standard deviation and minimize the standard deviation for a given mean. We may then assume (for example) that the 84% confidence level is maximized somewhere along the efficient frontier, though not necessarily at λ = 1. With a sufficiently large number of realizations, we may determine the 84% level for each value of λ and select the λ that gives the largest value. Our examples will illustrate these concepts and the decision tables that can be generated from them, using the simplified hypothesis that the NPV values are normally distributed. One very important aspect of reservoir risk management concerns decisions that could critically hinge on financial parameters like oil price or discount rate. We allow various treatments of the oil price in our software tool. In our examples below however, we will assume that the financial parameters are constants, and we discount using the Weighted Average Cost of Capital (WACC). Various optimization algorithms have been utilized, resulting in various levels of performance. The Downhill Simplex (also called amoeba or polytope) optimizer from Nelder and Mead15 was adapted to treat bounded constrained optimization. It was found to be easy-touse and fairly robust. It is also combined with an ability to perform simulated annealing16. The annealing option is not designed to converge to a global minimum (which we regard as an impractical goal when faced with real-field models with typically long run-times), but rather to provide an initial search for a better starting point. The actual optimization is always performed using the conventional downhill simplex method. The policy then becomes one where, as stated by Cullick et al.,5 “optimization means solution improvement, i.e., it is not necessarily achieving a provably optimal answer but … will result in better quality solutions.” By adopting such a practical policy, one can then compare various methods and select one that gives the best improvement for the same number of function evaluations, which is important when the function is as expensive as a full reservoir simulation. 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 4 Model Outline The example considers a mature gas field (onshore, sedimentary, anticlinal, no aquifer, believed unfaulted) that has been producing since late 1977. Initial production was 14.5 MMscf/d (Pinit = 2,480 psia) dropping steadily to around 3.5 MMscf/d in 2001 (Pavg = 460 psia) with no pressure support. Re-visiting the available data and fluid samples indicated that the small oil-rim known to exist in the NW part of the field was larger than initially thought, resulting in a revised current STOIP of around 15.5 MMstb ±12%. Table 1 provides some basic details of the field. A reservoir model was then constructed using the available data and history-matched (HM). The final model had around 15,000 active cells with a typical HM run taking around 3-4 minutes on a 2.8GHz Intel® Xeon™ processor PC running Windows XP or on a single processor of a multiprocessor SGI running Unix. A history match was achieved by adjusting some regional permeability multipliers and a couple of regional vertical transmissibilities. The primary match parameter was, however, pore volume that needed to be increased by around 25% relative to the initial estimate. In early 2001, a development to exploit the oil reserve was made using three vertical producers (under natural depletion). Subsequent production proved disappointing (less than 1% oil recovery). Consequently a revised plan was initiated in 2003. Alongside the existing plan, an alternative scheme was suggested involving three horizontal wells. Baseline Model. The baseline used for comparison purposes was the existing simulation model (originally four vertical gas wells and three vertical oil producers) without the new proposed horizontal wells. Table 2 presents the 7 control parameters used in optimization of the baseline model. Table 1 – General properties of the reservoir analysed Table 2 – Control variables used in the baseline model Development cases. Table 3 summarizes the control parameters for the three main development cases considered, each of which introduces the same three new horizontal wells (H1, H2 and H3). The wells were modeled using the multi-segmented well17, so that wellbore friction was properly considered. The main cases analyzed were: • • • Case A: No pressure support, Case B: Convert up to three of the existing oil wells into water injectors and continue gas production, Case C: re-inject some, or all, of the produced gas by converting up to two of the existing gas producers to become injectors. The optimized ‘baseline’ model was the basis for performance. Each of the alternative development cases was manually configured such that no significant gain could be established 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 5 by simply adjusting rates alone within their accepted ranges, so that gains due to optimization were ones that would otherwise be elusive (or cumbersome to achieve) using manual procedures. Constraints on flow rates into each well and well section were imposed and surface gas handling facilities constraints also applied. Table 3 – The control variables for the three development cases Objectives The optimizer was tasked with finding the combination of simulation event triggers (actions), production rates, injection rates and the proportion of produced gas to be re-injected that would maximize post-tax NPV of the asset. Faced with reservoir uncertainties, other relevant questions facing decision makers were: 1. Will the three proposed horizontal wells be economic and meet a specific required economic return? 2. What is the maximum potential value of asset NPV? 3. With what levels of confidence can this be stated? The basis for comparison for all models was taken from a 14-year production forecast from 2003 onwards. All tax, royalty, depreciation, discounts and costs (fixed and variable) were available to the optimizer via modular data files thereby providing flexibility if different tax and cost regimes need to be considered. Capital cost scheduling for the different development cases was also defined, as the software tool is able to determine the financial impact of pre-defined events triggered inside the flow simulator through an ACTION command (and its variants).17 The criterion upon which the event is triggered was also subject to optimization. Thus the event may not be triggered at all or at a different trigger threshold. To further reduce computational run-time, simulation restart handling was implemented for runs not considering reservoir uncertainty. When uncertainty was considered the simulation needed to be run from the beginning (no restarts) although the objective function was computed for the same 14-year prediction period. This is necessary as reservoir uncertainty parameters impact model initialization. Restarts based on the historymatched values for these parameters would then be inconsistent with the initialization using the new uncertainty parameter sampled values (except for the case where they are the same as those used to generate the original restarts). 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 6 Analysis This section outlines the results for each of the models with and without uncertainty. Baseline Model: No Uncertainty The NPV for the 14-year prediction from the available, manually engineered, model was $29.35m. This NPV increased by 1.2% (or $340,000) following optimization to $29.70m and was set as the baseline for purposes of comparison. Baseline: With Uncertainty Pore volume multiplier was considered the main uncertainty parameter and was set at 1.25 for history-matching purposes. However, values of 1.1 and 1.4 were also deemed to be reasonably consistent with the match and as such the uncertainty was represented by three equally probable values: 1.1, 1.25 and 1.4. In each objective function evaluation, the three realizations were run in parallel. The optimization was performed with several different risk-aversion factors to provide confidence levels for the results. These confidence levels assume a normally distributed distribution for NPV. Figure 2 presents the mean, standard deviation and objective function for four separate optimization runs – each providing a different level of confidence. The figure illustrates how the objective function F relates to the mean µ and standard deviation σ for each risk aversion coefficient λ, and how the optimum µ and σ both decrease as λ increases. When the risk aversion factor is zero, the mean NPV value of $26.43m has, by definition, a confidence level of 50%. In other words there is a 50% likelihood that the true value of NPV will be that value or higher. To increase the confidence level we increase the risk-aversion coefficient, resulting in a lower NPV. For example, an 84% confidence level is obtained using λ = 1.0, i.e., a value one standard deviation below the mean. We see from Fig. 2 that there is an 84% chance that the true NPV will be $18.66m or higher. As we increase our desired level of confidence we need to move further to the left of the mean (of the distribution of NPV), and the value of F becomes successively smaller. The 98% confidence level has an NPV of $15.24m – about 57% of the original mean. Table 4 presents the results for this optimization. λ Conf. Level* Function Mean µ Standard Deviation Optimized Gain, F $26.43m 0.0 1.0 50.0% Optimized F=µ−0.0×σ $7.79m $26.43m 83.6% F=µ−1.0×σ $26.35m $7.69m $18.66m 1.5 2.0 93.3% 97.7% F=µ−1.5×σ F=µ−2.0×σ $20.84m $18.86m $3.09m $1.81m $16.20m $15.24m *Confidence Levels assume results are distributed normally. Figure 2 – Baseline model results with uncertainty after optimization. Mean NPV, standard deviation of that mean and the value of the objective function, F, for each of the 4 confidence levels considered. Table 4 - Optimization results for baseline with uncertainty. Four different risk-aversion factors (λ) were evaluated providing confidence levels for the objective function F. The efficient frontier18 (plot of mean NPV against its standard deviation) for this baseline model is shown in Fig. 3. The four points shown highlighted are the four optimum values corresponding to confidence levels of 50%, 84%, 93% and 98%. The other points are the nonoptimum solutions encountered during the optimizations. The efficient frontier itself is defined by the four optimal solutions, and, in agreement with theory, these points slope from top right to bottom left with the smallest value of λ to the right. All non-optimal points fall below this line, 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 7 as they should. Although these observations would invariably hold for a definitive global optimization, such behaviour could fail with a local optimization method. Another consistency check is provided by Fig. 4, which presents the efficient frontier in terms of the objective functions versus σ for the different confidence levels. The four objective functions, Fλ, are plotted using the four optimum solutions only. For example, taking the top curve, i.e., for F0 (= µ), the upper right point is drawn using the µ and σ for λ = 0, the point next to it using the µ and σ for λ = 1 and so on to the last point using the µ and σ for λ = 2. The three other curves are obtained using the same procedure. It is seen that each objective function achieves its maximum for the optimum solution corresponding to the “correct” value of λ. For example, the objective function µ –σ is indeed maximized by the λ = 1 solution, which has a standard deviation of $7.69m and mean of $26.35m (F1 = $18.66m). Failure to achieve this result would indicate that the optimizer had been caught in a local minimum that is inconsistent with the others. In this eventuality one should re-launch the runs with the best values already found and hope to reach a global (or at least consistently better) solution. Indeed Press et al.16 states that “it is frequently a good idea to restart a multi-dimensional minimization routine at a point where it claims to have found a minimum.” Figure 3 – The efficient frontier for the baseline model shown with optimum values corresponding to different confidence levels. Each point represents the mean and standard deviation of three separate calls to the simulator for the three values sampling the uncertainty. Figure 4 - Consistency check plot for the efficient frontier shown in Fig. 4. Development Cases: No Uncertainty The three proposed development cases were optimized in a manner similar to the baseline model with results shown in Table 5. The total cost for the three horizontal well set is $9.75m. The net return (from the optimized baseline) over the whole period is only 17% for case A and negative for case B, but over 100% for case C. Other, more rigorous, metrics can be considered in the evaluation if required. Additional expenditures for shutting-in wells, water injection conversion and so on were defined using an economic costing schedule using simulation output to define the respective cost/charge to their respective event. Table 5 establishes also that the non-optimized deterministic case C (gas re-injection) yielded a net gain in NPV for the whole period of 8% over the optimized baseline. When optimized, however, case C furnished a gain of 33% and established that all the produced gas should be reinjected. Fig. 5 shows the variation in the objective function F (NPV) with successive trials for all cases. The number of trials is contingent on the convergence tolerance, the number of control variables considered and the response of the objective function. 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 8 Figure 5 – Evolution of objective functions (F) with iteration for the three cases and the baseline model (no uncertainty). Table 5 – Results summary of optimization of the three cases showing absolute and percentage gains. CapEx returns refer to investment in the three horizontal wells. Development Case C: With Uncertainty Having determined that cases A & B show negligible or negative gains, case C was considered for optimization under the same pore volume uncertainty as the baseline model. The results of the optimization for various λ are shown in Fig. 6. It shows, for example, that we can obtain a median asset NPV of $41.70m. This is similar to the optimized case C with no uncertainty ($39.54m from Table 5) and is consistent with the fact that throughput was finite due to limited gas handling capability. Consequently, a proposal to significantly increase gas-handling capacity to around 11.2 MMscf/d was proposed and costed at around $55m (and includes water injection facilities). This was also analysed but will not be discussed in this paper. Figure 6 – Case C optimization (with uncertainty) showing the ‘clustered’ efficient frontier for 6 risk aversion factors. Each point represents the result of 3 flow simulations. Discussion and Conclusions The answers to the main questions set out in the objectives are that 1. The three proposed wells are economic even with the existing gas-handling facilities. The optimum NPV without uncertainty was found to be $39.54m (33% more than the baseline model at $29.70m). 2. The degree of confidence of these results (in the presence of uncertainty) is presented in Table 4, which provides several values of confidence. There is a ‘clustering” of optimal solutions on the efficient frontiers in Fig. 6, i.e., the optimized control variables are very similar for the different λ evaluations. This merely means that the operating strategy required for optimizing the median is similar to that for optimizing, say, at the 84% confidence level. It does not necessarily mean that the standard deviation is 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 9 small, or that the different confidence levels for the NPV’s are close to each other. Decisionmakers would prefer such a situation, as they do not need to agonize whether or not to accept some level of risk. Alternatively clustering may be due to mean and standard deviation being very similar, yet the control variables are quite different. This means that, for any λ, the objective function has multiple local minima with similar numerical values. There is a paradigm problem when applying reservoir uncertainty to a history-matched model. While there may be agreement as to which reservoir parameter is uncertain and by how much, the act of using values different from those utilized in the history match may invalidate the match and create inconsistency. In our case we established that production was not impacted by the uncertainties considered, but the average field pressure did vary by ±120 psia at the start of the prediction period. Such inconsistency is acknowledged when treating history-matched models and work is needed to define a consistent forecast protocol when faced with a real history. For fields with no history this concern does not apply, but the issue will emerge as one accrues information about the field. It is acknowledged that with a local optimization method there is always a possibility that the optimized solutions represent local minima (especially for such a rich and non-linear problem such as this). This can be explicitly seen in cases with uncertainty when the efficient frontier points do not have consistent behaviour (both mean and standard deviation should decrease as the risk aversion parameter λ increases). Although in principle this problem can be solved by a global optimization method, there is no guarantee that such an algorithm will actually find the global optimum in a reasonable time. The optimization process applied here determined that the maximum (optimum) NPV for the asset was about $39.54m (again dependent on the level of certitude required). This established a significant gain over the existing exploitation plan, which furnished an optimum NPV of $29.70m. It is worth noting that the merits of applicability for optimization on existing field models are, of course, case dependent. However, the results shown here indicate that a relatively well-posed engineered model can be enhanced through judicious application of optimization. References 1. Raghuraman, B., Couët, B., Savundararaj, S., Bailey, W.J. and Wilkinson, D.: “Valuation of Technology and Information for Reservoir Risk Management,” paper SPE 86568, SPE Reservoir Evaluation & Engineering, October 2003. 2. Couët, B., Burridge, R. and Wilkinson, D.: Optimization Under Reservoir and Financial Uncertainty,” presented at the European Conference on the Mathematics of Oil Recovery (ECMOR), Baveno, Italy, September 5-8, 2000 3. Bittencourt, A.C. and Horne, R.N.: “Reservoir Development and Design Optimization,” paper SPE 38895 presented at the SPE Annual Technical Conference and Exhibition, San Antonio, Texas, 5-8 October, 1997 4. Burridge, R., Couët, B., Auzerais, F. and Vassiliadis, V.: “Optimal Stimulation of Oil Production,” in Decision Making Under Uncertainty: Energy & Power, The IMA Volumes in Mathematics and its Applications, vol. 128, Claude Greengard & Andrzej Ruszczynski Eds., Springer-Verlag, New York, 2002, pp. 17-37 5. Cullick, A.S., Heath, D., Narayanan, K., April, J. and Kelly, J.: “Optimizing Multi-Field Scheduling and Production Strategy with Reduced Risk,” paper SPE 84239, presented at the SPE Annual Technical Conference and Exhibition, Denver, Colorado, October 5-8, 2003 6. Davidson, J.E. and Beckner, B.L.: “Integrated Optimization for Rate Allocation in Reservoir Simulation,” paper SPE 79701, presented at the SPE Reservoir Simulation Symposium, Houston, TX, February 3-5, 2003 7. Harding, T.J., Radcliffe, N.J. and King, P.R.: “Optimization of Production Strategies Using Stochastic Search Methods,” paper SPE 35505, presented at the 3-D Reservoir Modeling Conference, Stavanger, Norway, 16-17 April, 1996 8. Jonsbråten, T.W.: “Optimization Models for Petroleum Field Exploration,” Ph.D. dissertation, Norwegian School of Economics and Business Administration, May 1998 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 10 9. Litvak, M., Hutchins, L.A., Skinner, R.C., Darlow, B.L., Wood, R.C. and Kuest, J.: “Prudhoe Bay E-Field Production Optimization System Based on Integrated Reservoir and Facility Simulation,” paper SPE 77643, presented at the SPE Annual Technical Conference and Exhibition, San Antonio, Texas, 29 September-2 October, 2002 10. Narayanan, K., Cullick, A.S. and Bennett, M.: “Better Field Development Decisions From Multi-Scenario, Interdependent Reservoir, Well, and Facility Simulations,” paper SPE 79703, presented at the SPE Reservoir Simulation Symposium, Houston, TX, February 3-5, 2003 11. Wang, P., Litvak, M. and Aziz, K.: “Optimization of Production Operations in Petroleum Fields,” paper SPE 77658, presented at the SPE Annual Technical Conference and Exhibition, San Antonio, Texas, 29 September-2 October, 2002 12. Yang, D., Zhang, Q., Gu, Y. and Li, L.: “Integrated Global Optimization of Displacement Efficiency in Hydrocarbon Reservoirs,” paper SPE 81035, presented at the SPE Latin American and Caribbean Petroleum Engineering Conference, Port-of-Spain, Trinidad, West Indies, April 27-30, 2003 13. Yeten, B., Durlofsky, L. and Aziz, K.: “Optimization of Smart Well Control,” paper SPE 79031, presented at the SPE International Thermal Operations and Heavy Oil Symposium and International Horizontal Well Technology Conference, Calgary, Alberta, 4-7 November, 2002 14. Yeten, B. Durlofsky, L.J. and Aziz, K.: “Optimization of Nonconventional Well Type, Location and Trajectory,” paper SPE 77565, presented at the SPE Annual Technical Conference and Exhibition, San Antonio, Texas, 29 September-2 October, 2002 15. Nelder, J.A., and Mead, R.: “A Simplex for Function Minimization” Computer Journal, 7, 1965, pp. 308-313 16. Press, W.H., Flannery, B.P., Teukolsky, S.A. and Vetterling, W.T.: Numerical Recipes in C – The Art of Scientific Computing, second edition, Cambridge University Press, 1992 17. ECLIPSE Office, Reference Manual and Technical Description, GeoQuest, Houston, 2003 18. Markowitz, H.M.: “Portfolio Selection,” J. of Finance, 7, No. 1, pp. 77-91, 1952. Also in Portfolio Selection, Wiley, new York, 1987 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004