A007 REBUILDING AND RECALIBRATING AN EXISTING RESERVOIR MODEL
advertisement

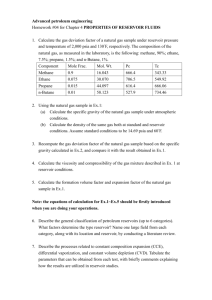
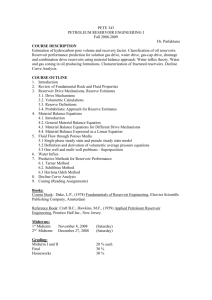
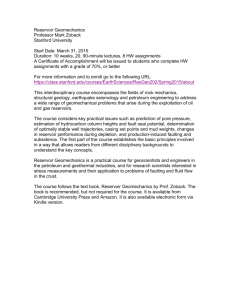
1 A007 REBUILDING AND RECALIBRATING AN EXISTING RESERVOIR MODEL MICKAËLE LE RAVALEC-DUPIN, LIN YING HU, OUAËL MEGHIRBI AND FRÉDÉRIC ROGGERO Institut Français du Pétrole, 1 & 4 avenue de Bois Préau, 92852 Rueil-Malmaison Cedex France Abstract The increasing computer power and the recent developments in history-matching can motivate the re-examination of previously built reservoir models. To save engineer and CPU times, we develop four distinct algorithms, which allow for rebuilding an existing reservoir model without restarting the reservoir study from scratch. These algorithms involve techniques such as optimization, relaxation, Wiener filtering or sequential reconstruction. Basically, they are used to identify a random function and a set of random numbers. Given the random function, the random numbers yield a realization, which is pretty close to the existing reservoir model. Once the random numbers are known, the existing reservoir model can be submitted to a new historymatching process to improve the data fit or to account for newly collected data. Introduction A reservoir model is a grid populated by reservoir properties such as permeability. The available field data do not provide a deterministic description of the reservoir, but are used to infer a random function whose realizations are likely reservoir models. The drawn realizations usually honor neither the static data (well logs, cores), nor the dynamic data (pressures, flow rates…). Static data can be easily accounted for using conditional kriging. Integrating the dynamic data entails a time-consuming history-matching procedure: an initial reservoir model is successively modified to improve the match. To take advantage of the increasing computer power and of the recent developments in historymatching, reservoir engineers may wish to re-examine a previously built reservoir model. The idea is to update and refine the existing reservoir model by integrating newly collected data. To do this, reservoir engineers must be capable of rebuilding the existing reservoir model: they have to know the random function inferred from the data, the random numbers used to generate the reservoir model, and the different steps in the history-matching procedure. Unfortunately, this information is not always available. We supply reservoir engineers with tools, which extract the random numbers from the existing reservoir model. A preliminary statistical analysis is performed to infer an appropriate random function. Then, four algorithms are proposed to identify random numbers capable of reproducing the existing reservoir model. The first one is based upon optimization: it can be used whatever the considered geostatistical simulator. The second and the third algorithms are designed for simulators involving a convolution product. The final algorithm is suitable for sequential (Gaussian, indicator or multipoint) simulators. Once the random numbers are known, the existing reservoir model can be rebuilt and submitted to a new history-matching process. This capability 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 2 is demonstrated by rebuilding existing continuous and facies reservoir models, which are then globally and locally modified. A few words about geostatistics Many simulation techniques have been proposed to generate multiple realizations or pictures of the spatial distribution of an attribute such as permeability or porosity. Before proceeding further, we revisit two geostatistical simulation techniques suitable for pixel-based realizations. The basic inputs of geostatistical simulators are a seed, a mean, a variance and a covariance model. The seed allows for populating each grid block with a random number. The whole set of random numbers is noticed z. The mean, variance and covariance characterize a random function S. Sequential simulation The sequential simulation approach reduces the problem of generating a N-dimensional random vector into a series of N univariate generation problems. In this case, the random numbers of interest are uniform deviates. First, we define a random path visiting each block of the grid only once. At each grid block, we estimate, by kriging, the probability distribution of the studied reservoir attribute conditioned to the values simulated at the previously visited grid blocks. Then, we simulate an attribute value from that conditional probability distribution using the uniform number attributed to the considered grid block. This simulation process is repeated until all grid blocks are visited. In practice, this sequential approach is often used for Gaussian simulation, Indicator simulation (e.g., Goovaerts, 1997) and simulation based on multipoint statistics (Strebelle, 2002). FFT-Moving Average simulation The Fast Fourier Transform – Moving Average (FFT-MA) algorithm (Le Ravalec et al., 2000) produces Gaussian realizations with stationary covariance functions. In this case, the random numbers of interest are normal deviates. Based upon the moving average framework, a Gaussian random field y can be written as: y = y0 + f 1z (1 where y0 is the mean of y and z is a Gaussian white noise. Function f results from the decomposition of the covariance function as a convolution product: C=f 1f. As determining f and calculating the convolution product f 1z may be difficult, the problem is translated into the spectral domain using discrete fast Fourier transforms, which makes the calculations much easier and fast. Gradual deformation The gradual deformation method is a geostatistical parameterization technique allowing to perturb a realization from a few parameters, called deformation parameters, while preserving the spatial covariance model (Hu, 2000). The basic gradual deformation relation applies to Gaussian white noises: z(ρ ) = z1 cos(π ρ) + z2 sin(π ρ). (2 If z1 and z2 are two independent Gaussian white noises, z(ρ) is also a Gaussian white noise. Varying deformation parameter ρ yields a continuous chain of Gaussian white noises. As the deformation rule is periodic, ρ ranges from –1 to 1. For ρ = 0, z is the same as z1 , when ρ = ½, z 3 is the same as z2 . Providing z to a geostatistical simulator yields a Gaussian realization y=S(z). Smooth variations in ρ induce smooth variations in y. Whatever deformation parameter ρ, z(ρ) is a Gaussian white noise. As a result, y(ρ) has the same covariance model as realizations y1 =S(z1 ) and y2 =S(z2 ). All of the z components can be modified simultaneously resulting in a global deformation of y. An alternative is to change only some of the z components, which induces a local deformation of y. Although we focus on Gaussian white noises, the gradual deformation rule also applies to any set of random numbers, which can be transformed to a Gaussian white noise. These properties make the gradual deformation method very suitable to refine the calibration of a reservoir model provided the Gaussian white noise used to generate the starting reservoir model is known. Rebuilding existing reservoir models Given an existing reservoir model yres, the problem consists in determining a random function S and a set of random numbers z so that the function, when applied to the random numbers, provides a realization y=S(z) similar to the reservoir model. A preliminary statistical analysis can give the random S function. Thus, we presume that this random function is known and we give much attention to the estimation of the random numbers. Four distinct algorithms are introduced for solving such a problem. Optimization A very simple and general approach is based upon optimization. We define an objective function to measure the mismatch between a starting realization y and the existing reservoir model: J (z ) = ( 1 i y i (z ) − y res ∑ 2 i ) 2 (3 Identifying random numbers yielding a realization similar to the existing reservoir model consists in determining a set of random numbers, which minimizes the objective function. The starting set of random numbers is iteratively modified until the objective function reduces to a low-enough level. To illustrate the application of the optimization rebuilding procedure, we consider the world map shown in Figure 1 as an existing reservoir model. It is discretized over a grid of 360x151 blocks. For a given simulation process, we attempt to identify a set of normal deviates capable of producing a realization as close as possible to this world map. First, we assume that the world map can be generated from the truncated Gaussian method (Matheron et al., 1987). This method calls for a Gaussian realization. When truncated with respect to thresholds proportional to facies volume fractions, it becomes an indicator realization. For the studied world map, the volume fractions of the sea and continental facies are 66% and 34%, respectively. The variogram of the underlying Gaussian realization is supposed to be stable with an exponent of 1.4. It is also considered as isotropic with a correlation length of 40 grid blocks. The minimization of the previously mentioned objective function leads to the “Gaussian white noise” depicted in Figure 1. Clearly, it is not a Gaussian white noise: the deviates are not independent, their mean is not zero and their variance is not one. It actually means that the selected simulation process and the selected geostatistical parameters may be not appropriate. However, the essential point is that we obtain a set of random numbers, which allows for rebuilding pretty well the world map (Figure 1, bottom left). 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 4 Figure 1. Left, top: existing reservoir model. Left, bottom: reservoir model rebuilt from the estimated random numbers. Right, top: estimated random numbers. Right, bottom: histogram of the estimated random numbers. Relaxation In the following two sections, we focus on geostatistical simulations involving a convolution product as shown in Eq. 1. For simplicity, the y0 mean is set to 0. Thus, the problem boils down to the estimation of a Gaussian white noise z so that yres ≈ f 1z. As mentioned above, f results from the decomposition of the covariance function. We first tackle this problem by referring to the relaxation techniques (Press et al., 1992) originally developed to solve linear systems of equations such as Ax = B. Basically, an initial guess of x is computed from some unspecified method before being successively improved. The exact solution z res of the problem is unknown. Instead, we consider an initial approximation, noticed z. Thus, the error is simply given by ∆z = z res − z . Unfortunately, the error is just as unknown as the exact solution itself. However, a computable measure of how well z approximates z res is the residual ∆y = y res − y .If we rewrite the original problem as: yres = f 1zres, (4 we can subtract y = f 1z from the above equation. We find the residual equation: ∆y = f ∗ ∆z (5 which says that the error satisfies the same set of equations as the unknown zres when y res is replaced by the residual ∆y . At this point, we split function f as the sum of a function g and a dirac δ such as δ (0) = a, a being a constant. g is the same as f everywhere except in 0: g(0)=f(0)- δ (0). Thus, the residual equation is reformulated as: ∆y = (g + δ) ∗ ∆z (6 In the frequency space, this relation becomes: ∆Y = G∆Z + a∆Z (7 where ∆Y , ∆Z and G are the Fourier transforms of ∆y , ∆z and g respectively. This results in an iteration scheme: 5 ∆Y (i ) = G ∆Z (i ) + a∆Z (i +1) ∆Z (i +1) = ( 1 ∆Y (i ) − G ∆Z (i ) a ) (8 We note Z(i) the Fourier transform of the current approximation and Z(i+1) the Fourier transform of the new updated approximation. The backward Fourier transform of Z(i+1) gives the correction to add to Z(i). This iteration sweeps are continued until we obtain satisfactory convergence to the solution. Wiener filtering An alternative is the Wiener filtering (Press et al., 1992). Let us come back to Eq. 4. In the frequency space, it is rewritten as: Yres = F.Zres, (9 where Yres, Zres and F are the Fourier transforms of yres, zres and f respectively. Applying the ( Wiener filtering to compute Zres consists in replacing F-1 by F / F 2 ) + ε . ε is a constant much smaller than 1. |F| stands for the F norm and F denotes its complex conjugate. Thus, the existing reservoir model can be rebuilt from the following Gaussian white noise: z res = TF ⎛ −1 ⎜ ⎜ ⎝F F 2 ⎞ Yres ⎟ ⎟ +ε ⎠ (10 An example is depicted in Figure 2. Starting from the existing one million grid block reservoir model shown on the top, left, we use the Wiener filtering technique to estimate the underlying Gaussian white noise (top, right). The variogram is assumed to be exponential and isotropic with a correlation length of 300 grid blocks. We observe that the estimated Gaussian white noise (Figure 2, top right) is not exactly a Gaussian white noise, although the selected variogram was exactly the same as the one used to generate the existing reservoir model. It exhibits stripes and its variance is clearly different from 1. In addition, the realization generated from this Gaussian white noise looks different from the existing reservoir model (Figure 2, bottom left), at least on the boundaries over a width of one correlation length. To avoid these boundary perturbations, we also apply the Wiener filtering to the same existing reservoir model, but extended over one correlation length everywhere as shown in Figure 3 (top, left). The extra grid blocks located out of the reservoir model are set to the values of the closest reservoir grid blocks. The results are significantly improved. The estimated Gaussian white noise is formed of independent normal deviates (Figure 3, top right). Its mean and variance are 0 and 1, respectively. Last, the realization (Figure 3, bottom left) rebuilt from this Gaussian white noise is very similar to the existing reservoir model, even if there are still some slight differences on the borders. Based on this one million grid block example (Figure 3), we performed a few comparison tests to estimate the efficiency the three previous rebuilding techniques. We showed that the optimization and relaxation approaches need hours to converge to an acceptable Gaussian white noise while the Wiener filtering requires only 25 seconds on a standard PC. 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 6 Figure 2. Left, top: existing reservoir model. Left, bottom: reservoir model rebuilt from the estimated random numbers. Right, top: estimated random numbers. Right, bottom: histogram of the estimated random numbers. Figure 3. Left, top: same existing reservoir model as in Figure 2, but extended over one correlation length. Left, bottom: reservoir model rebuilt from the estimated random numbers. Right, top: estimated random numbers. Right, bottom: histogram of the estimated random numbers. Sequential reconstruction In this last section, we suggest a sequential rebuilding process to determine the set of random numbers capable of leading to an existing reservoir model. This process can be applied whatever the simulation process used to simulate the existing reservoir model. The rebuilding process is just the opposite of the simulation one. First, the random path established to visit all of the grid blocks is frozen: the reconstruction path has to be identical to the simulation path. 7 At each grid block, we estimate the probability distribution conditioned to the values of the previously visited grid blocks. Then, we transform the reservoir value attributed to this grid block to a uniform deviate following the identified conditional probability distribution. This uniform deviate can also be turned into a normal deviate. This rebuilding process is repeated until all grid blocks are visited. This sequential rebuilding approach is suitable whatever the considered sequential simulation algorithm. Deformation of existing reservoir models Once the random function and the random numbers have been identified, a realization similar to the existing reservoir model can be generated. The next step consists in coming back to historymatching to refine and update the reservoir model. As the random numbers are known, they can be modified using the gradual deformation method (Eq. 2). It induces a global deformation of the reservoir model when all random numbers are modified (Figure 4) or a local deformation of the reservoir model when only the random numbers populating a given domain are modified (Figure 5). 1 4 2 5 3 6 Figure 4. Global gradual deformation of the world map (from 1 to 6). The whole map is modified. 1 4 2 5 3 6 Figure 5. Local gradual deformation of the world map (from 1 to 6). Deformation is centred on Indonesia. 9th European Conference on the Mathematics of Oil Recovery — Cannes, France, 30 August - 2 September 2004 8 Conclusions The following main conclusions can be drawn from this study: - Four distinct algorithms were presented to rebuild an existing reservoir model. Given a inferred random function, they entail to the extraction of random numbers from the existing reservoir model. - The first algorithm is an optimization procedure: it can be used whatever the considered geostatistical simulator. The second and the third algorithms are designed for simulators involving a convolution product. They are based upon relaxation and Wiener filtering, respectively. The fourth algorithm involves a sequential rebuilding process. It allows for extracting random numbers, which are used to rebuild the existing reservoir model from a sequential (Gaussian, indicator or multipoint) simulation algorithm. It does not require that the existing reservoir model was actually simulated from a sequential approach. - The Wiener filtering technique turned out to be of interest when applied to an enlarged reservoir model. Extending the reservoir model allows for reducing drastically the boundary effects. In addition, numerical tests pointed out the efficiency of this approach in terms of CPU times. - Once the random function and the random numbers are known, the existing reservoir model can be rebuilt and submitted to a history-matching process. Applying the gradual deformation method to the random numbers results in a global or a local deformation. Acknowledgements This work has been performed within the framework of the CONDOR II joint industry project. The authors thank the participating companies for their support: Groupement Berkine, BHPBilliton, Eni-Agip, Gaz de France, Petrobras and Total. References Goovaerts, P., Geostatistics for natural resources evaluation, Oxford Univ. Press, New York, USA, 1997. Hu L.Y., Gradual deformation and iterative calibration of Gaussian-related stochastic models, Math. Geol., 32(1), 87-108, 2000. Matheron, G., Beucher, H., de Fouquet, C., Galli, A., and Ravenne, C., Conditional simulation of the geometry of fluvio-deltaic reservoirs, SPE 16753, in Proc. of the SPE ATCE, Dallas, TX, 1987. Le Ravalec M., Nœtinger B. and Hu L.Y., The FFT moving average (FFT-MA) generator: an efficient numerical method for generating and conditioning Gaussian simulations, Math. Geol., 32(6), 701-723, 2000. Press, W.H., Teukolsky, S.A., Vetterling, W.T., and Flannery, B.P., Numerical recipes in fortran 77, Cambridge Univ. Press, NY, USA, 1992. Strebelle, S., Conditional simulation of complex geological structures using multiple-point statistics, Math. Geol., 34(1), 1-21, 2002.