Digital image plane holography as a three-dimensional flow velocimetry technique
advertisement

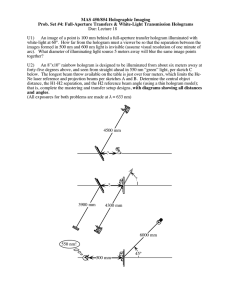
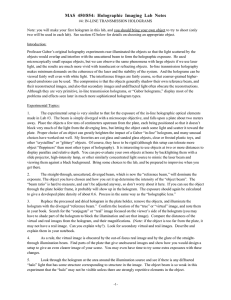
Digital image plane holography as a three-dimensional flow velocimetry technique J. Lobera*, N. Andrés, M.P. Arroyo Dpto. Física Aplicada. Facultad de Ciencias. Universidad de Zaragoza C/ Pedro Cerbuna 12, 50.009-Zaragoza, SPAIN ABSTRACT This paper shows the feasibility of applying digital image plane holography (DIPH) as a fluid velocimetry technique for simultaneous measurements of all three components of the velocity field. As a first approach DIPH has been set up to measure a single fluid plane. The recording apparatus is a digital speckle interferometer (DSPI) with spatial phase shifting (SPS). The speckle interferometer has an out-of-plane sensitivity and the off-axis reference beam produces a spatial modulation in the pattern (hologram) recorded by the CCD camera. From the interferometric and photographic analysis of the reconstructed object wave, the three velocity components in the fluid plane are obtained. The complex amplitude of the object wave is calculated by the application of a Fourier-transform method to the hologram. The phase change between two subsequent frames yields an out-of-plane component of the velocity field. The two in-plane components are obtained, as in digital speckle photography, by cross correlation of the reconstructed object wave’s intensity. Some quantitative results in a Rayleigh-Bénard convective flow are presented. In the final setup, angular multiplexing with coherence length control has been introduced in order to simultaneously measure the velocity fields in two fluid planes. Some preliminary results from the convective flow are presented. Keywords: Digital holography, fluid velocimetry, holographic interferometry, spatial phase shifting. 1 INTRODUCTION Holographic techniques have been widely used for non-destructive measurement of displacements, deformations and even vibrations in experimental solid mechanics. All of them are based on recording a hologram, i.e. the interference between an object beam, that carries the information on the solid object, and its corresponding reference beam. The reconstruction of the object wave field from the hologram gives full information about the solid object. In optical holography, the recording is done on photographic films and the object wave is reconstructed by illuminating the developed film with a beam similar to the reference beam. For many years, optical holography was the only choice for any application. However, in the last few years, digital holography1 has become very popular. In digital holography, both the hologram recording and the object wave reconstruction are digital processes. Temporal and spatial phase shifting speckle pattern interferometry2 can also be included in digital holography. Many different arrangements for digital hologram recording have already been reported: in-line3, off-axis[4-7], lensless[3, image plane[6-9]. Different numerical reconstruction processes are used depending on the recording arrangement: a Fourier method7 for the image plane recording, a propagation/diffraction method4 for the lensless recording and an intensity based algorithm2 for the speckle pattern interferometry arrangement. Interferometric techniques[3-5],7,8 that only make use of the object wave phase information have been used more often than photographic/imaging techniques6,9 where the important information is carried on the object wave amplitude. Static deformation problems have been analysed more often than dynamic events. 5] In the digital holography applications in solid mechanics, the object wave is formed by the light scattered by the solid surface after being illuminated by an extended laser beam, whose propagation direction has been appropriately chosen. *jlobera@unizar.es; phone: 34 976 762605; fax: 34 976 761233 Speckle Metrology 2003, Kay Gastinger, Ole Johan Løkberg, Svein Winther, Editors, SPIE Vol. 4933 (2003) © 2003 SPIE . 0277-786X/03/$15.00 279 The object wave phase depends on the observation direction and on the illumination direction while the object wave intensity depends more on the surface properties. Applications of laser speckle metrology techniques in fluid mechanics are much less common. Although any solid deformation/displacement measurement technique could be adapted as a fluid velocity measurement technique, the practical implementation is more difficult due to the intrinsic dynamic nature of the fluid mechanics problems. Particle Image Velocimetry (PIV)10, which is now a widely used fluid velocimetry technique, is an example of a very successful adaptation of a solid deformation measurement technique (speckle photography). In PIV, a thin laser sheet is used to illuminate the fluid, previously seeded with small tracer particles. The object wave is formed by the light scattered by the tracers inside the illuminated fluid plane; this fluid plane plays the same role as the solid object surface. Some work has also been done on adapting some interferometric techniques11 for fluid velocimetry. This paper will focus in showing the feasibility of digital holography as a fluid velocimetry technique. In this application, a light sheet illumination for marking a fluid plane and an image plane hologram recording arrangement will be used. We will start describing the recording setup and the numerical reconstruction for this digital image plane holography technique (DIPH). Then, the interferometric and photographic analysis used to measure the 3-C velocity field will be presented together with some results in a convective flow. Finally, the extension of DIPH for measurement in a 3-D region by means of an angular multiplexed holographic recording will be described. 2 HOLOGRAM RECORDING The setup for the hologram recording (Fig.1) is typical of a spatial phase shifting – digital speckle pattern interferometer (SPS-DSPI). As is usual in DSPI, a lens is used to image the object onto the CCD sensor. Specific of this fluid velocimetry application is the sheet like illumination beam that marks a fluid plane playing the same role as a rough surface. Specific of this SPS-DSPI setup is the divergent beam that has to be placed in a very precise position respect to the object beam (see Fig. 1b). Because the divergent reference beam has to originate in the same plane and at a suitable distance from the lens aperture, Flow this SPS-DSPI set-up can be also Object beam u viewed as an off-axis digital holography set-up. Because of the Laser sheet u K small angles allowed by the low Beam spatial resolution of CCD sensors, Reference splitter Object beam beam the reference and the object beams are combined by means of a beam Lens splitter placed between the lens Optic fiber and the CCD camera sensor. Beam splitter CCD b) Reference beam i o a) CCD camera Fig 1. a) Setup for hologram recording in DIPH ;b) Relative position of the reference and object beams. The hologram recorded by the CCD sensor has been also referred as specklegram because it is always a speckle field. It contains information on the amplitude and phase of both the object and the reference beams. As in any interference pattern between two beams, the specklegram/hologram intensity can be expressed as I = I o + I r + 2 I o I r cos(φo − φ r ) , (1) where I and φ are the intensity and phase, with o and r referring to the object and the reference waves. Let us note that φo is a spatially random phase because it changes from one speckle/particle to the next. This φo needs to be locally constant in a 2-3 pixels area in order for the CCD sensor to be able of recording the spatial frequencies associated to the hologram recording. The lens aperture is thus chosen to ensure a minimum mean speckle size of 2.4 pixels. This requirement is common to digital PIV for an appropriate accuracy. The spatial dependence of φr is approximately linear with the rate of change depending on the angle α subtended by the object and reference beams. Thus, the hologram 280 Proc. of SPIE Vol. 4933 intensity will locally show fringes whose spacing depends on this angle α. If α is too small or too big, the hologram will look like a random speckle field with no modulation; if α is appropriate the fringe modulation will be seen (Fig. 2). Fig 2.Specklegram with spatial phase shifting modulation. 3 NUMERICAL RECONSTRUCTION In digital holography, the most common reconstruction process is similar to optical holography: the hologram intensity is multiplied by the reference or its conjugated beam and the output wave is propagated back to either the real or the virtual image plane. With our recording setup, the hologram behaves as a lensless Fourier transform hologram of the lens aperture12. Thus the most appropriate numerical reconstruction is based on a Fourier method. The Fourier transform of the digital hologram (Fig. 3) contains three distinct parts: a dc term and a virtual and a real image of the lens aperture. The dc term correspond to the Io+Ir terms of eq. 1; the decaying of the intensity of this term is typical of the speckle statistics due to the Io; the Ir contribution is a delta function in the origin. The two heptagons are the images of the lens aperture. The other features in this Fourier plane are due to some spurious interference patterns on the recording and care should be taken not to have any of them over the heptagons. By selecting any of the heptagons and calculating the inverse Fourier transform we obtain a complex wave whose amplitude and phase approximately correspond to the amplitude and phase of the original object wave in the image plane (CCD sensor). Only the sign of the reconstructed phase depends on the selected heptagon. For an appropriate object reconstruction, the heptagons should neither overlap with each other nor with the dc term. The position of the two heptagons is directly related to the relative position of the reference and object beams on the hologram recording. In our case, these two beams have been displaced along a diagonal direction in order to have the lens aperture as big as possible. Let us note that the amplitude of the reconstructed wave correspond to the object wave amplitude multiplied by the reference beam amplitude, which do not have any effect if this Ir is approximately constant. The reconstructed wave phase is the object wave phase plus a small contribution from the reference due to its spherical geometry. This small phase contribution has to be taken into account if propagation back to the fluid plane or to any other plane is going to be done. For fluid velocimetry, we do not have taken it into account. Fig 3.Fourier transform of fig. 2. 4 4.1 3-C FLUID VELOCIMETRY Basic principles For fluid velocimetry, as for solid deformation measurements, two holograms are recorded corresponding to different object states. In fluid velocimetry, where we always deal with dynamic events, the recordings are taken in different time instants. The time interval ∆T between the two recordings is an important parameter that is determined for each flow taking into account the velocity field and the recording geometry. Following eq. 1, the specklegram intensities can be written as I1 = I o,1 + I r + 2 I o,1 I r cos(φo ,1 − φ r ) , (2) I 2 = I o,2 + I r + 2 I o,2 I r cos(φo ,1 + ∆φo − φ r ) , (3) with 1 and 2 referring to the first and the second specklegrams and where the (x,y) dependence of all the magnitudes has been omitted for clarity. Let us note that not only φo but also Io are spatially random magnitudes because the object is a speckle (or particle image) field. However, for each (x,y) position the change in φo, ∆φo, is not random but related to the local fluid displacement. This relationship can be expressed as r r ∆ φo = K⋅ V ∆T , (4) Proc. of SPIE Vol. 4933 281 r r r r r r where V is the local fluid velocity, and K =(2π/λ)( u o- u i) is the sensitivity vector, u o and u i being unity vectors in the observation and the illumination directions respectively (see Fig. 1) and λ being the laser wavelength in the fluid. The changes from Io,1 to Io,2 are negligible when the particle image moves less r than itsr diameter during ∆T. In this case, ∆φo is the useful quantity that provides information about the projection of V along K , Vk. In fluid velocimetry, because of the illumination geometry, Vk is always an out of plane velocity component. ∆φo is obtained by subtracting the reconstructed object wave phases corresponding to the two recorded holograms. When the particle image moves more than its diameter, Io,1 and Io,2 are the useful quantities. r By cross correlating the Io,1 and Io,2 reconstructed amplitudes, as in DSP or PIV, the in-plane displacement d is obtained. The velocity is then calculated as r r V = d/M ∆T , (5) being M the imaging system magnification. Let us note that the three velocity components (3-C velocity field) can be measured by using both the phase and the amplitude of the numerically reconstructed object wave. For 3-C fluid velocimetry to work with only two hologram recordings, Vk needs to be much smaller than the in-plane velocity projection due to the interferometric sensitivity for the measurements of Vk and the photographic sensitivity for the measurement of the in-plane velocity. However, in general, three holograms with two different ∆T need to be recorded. 4.2 Experimental results To demonstrate the performance of DIPH in a real flow, we applied it to a Rayleigh-Bénard convective flow13 setup in a cell filled with an aqueous glycerol solution that was seeded with 5µm diameter latex particles. The dimensions of the cell were Lx=25 mm, Ly= 25 mm and Lz=12.5 mm. A 17mW He-Ne laser beam was shaped into a 15mm high 1mm wide light sheet that illuminates an XZ fluid plane. An electromechanical shutter was used to control the exposure time for the hologram recording and the time interval between holograms. While reference beam energy was never a problem, a minimum exposure time of about 5 ms was needed for adequate energy on the object wave. The convective flow velocity was appropriately chosen in the range of 10-20 µm/s so that no time averaging holography was produced. Pairs of holograms with time interval ∆T1 suitable for the interferometric analysis were recorded at time intervals ∆T2 suitable for the photographic analysis. Figure 4 shows some typical results obtained from a y= 2 mm plane, with ∆T1=80 ms and ∆T2= 8s. Figure 4a presents the phase map obtained from the interferometric analysis; it shows the spatial pattern of the projection of the velocity vector on a direction at 45º with the X and Y axis. a) b) c) 12 -12 9 18 6 -6 0 6 12 0 6 12 0 -6 -6 -12 e) 18 24 12 0 d) 6 6 f) Fig 4. 3-C velocity measurements in a convective flow with DIPH. a) phase map from the interferometric analysis; b) reconstructed intensity field; c) in-plane vector map from the photographic analysis; d) isoline map for Vx; e) isoline map for Vy; f) isoline map for Vz Figure 4b presents the intensity field obtained from one hologram; it shows a good image of the cell. Figure 4c presents the in-plane vector map obtained from the photographic/PIV analysis of two images like the one in fig. 4b. By solving a 282 Proc. of SPIE Vol. 4933 three equation system with the in-plane velocity data of figure 4c and the velocity projection of figure 4a, the three components of the vector field can be calculated. Figures 4d to 4f presents the results as isoline maps for Vx, Vy and Vz. Let us note that, as a first approximation, the Vx and the Vz data come directly from the PIV data while Vy data comes from eliminating from the 45º projection the Vx component. The fact that the spatial pattern of the Vy field is completely different than Vx and than the phase map demonstrates the accuracy of this interferometric/photographic analysis for 3-C velocimetry. 5 5.1 3-D FLUID VELOCIMETRY Basic principles For 3-D velocimetry, the whole fluid instead of just one plane should be recorded. Although illuminating a whole volume is possible, recording it properly presents a lot of problems in practice such as noise from out of focus particles. Furthermore, digital holographic interferometry will not work because the reconstructed wave phase will always contain information from the whole volume. The approach we have chosen is to record only a limited number of fluid planes, by keeping the sheet like illumination. This should reduce the noise on the photographic analysis. However, in order solve the interferometric analysis problems, each fluid plane has to be recorded independently of each other. As shown by Schedin et al8, several holographic recordings can be angularly multiplexed by using reference beams with point sources in different position for each recording, and exploiting the beam temporal coherence length properties. For 3-D fluid velocimetry, each reference beam has to be made coherent with only one fluid plane (fig. 5). Flow Laser sheet 2 Laser sheet 1 b) Lens Beam splitter Reference beam 1 Reference beam 2 CCD camera c) a) Fig 5. a) Setup for a two-plane recording with DIPH. b) Digital hologram. c) Fourier transform of the digital hologram It can be done using one laser and adjusting the optical path lengths of each reference beam and each light sheet. Another possibility would be to use an array of lasers so that each light sheet and its corresponding reference beam comes from a different laser. For demonstration purposes, we show an only two-plane hologram recording setup (fig.5a). The fluid is illuminated with two laser sheets whose scattered waves will not interfere with each other. Two reference beams are used. Reference beam 1 interferes only with the object wave 1 while reference beam 2 interferes only with object wave 2. In a two-plane system, laser polarization properties can also be used to make the two recording systems non coherent with each other. A typical specklegram (fig.5b) and its corresponding Fourier transform (fig.5c) are shown. The two reference beams have been displaced along the two diagonals (for maximum lens aperture in the recording). Let us note that the specklegram and its Fourier transform will look the same no matter if beams 1 and 2 are coherent with each other or not. It will be on the reconstruction where it will be apparent whether the two object waves have been recorded independently or not. 5.2 Results The two-plane hologram recording setup has also been tested on the Rayleigh-Bénard convective flow using the 17 mw He-Ne laser as the only light source. The laser coherence properties were checked with DIPH. Some holograms with Proc. of SPIE Vol. 4933 283 one laser sheet and one reference beam were taken for increasingly bigger optical path lengths on the reference beam. By looking at the intensity of the heptagons (the interference terms) on the Fourier plane, we measured the coherence length to be minimum for an optical path length of 35 cm. Then, this optical path length difference was introduced between the recording systems (laser sheet and reference beam) 1 and 2. By taking holograms with the two reference beams and only one laser sheet the perfect matching of all beams could be checked by looking at the intensity of the heptagons obtained for the laser sheets 1 and 2. Figure 6 presents some results obtained from recording two planes at y=6mm and y=19 mm. The phase maps obtained for each plane are so different that nothing would have been seen without the coherence control. The phase maps are in agreement with the expected pattern for the toroidal 3-D flow normally appearing in this convective flow. The intensity field also allowed a PIV analysis. However, no 3-C quantitative analysis in the twoplane DIPH has been done because both the interferometric and the PIV data were less accurate than in the previous setup due to of a too low energy a) b) per fluid plane in the present setup. Fig 6.Results with DIPH as a 3-D velocimetry technique. Wrapped phase maps for: a) plane 1 (y= 19 mm); b) plane 2 (y= 6 mm). 6 CONCLUSIONS An off-axis DIPH setup for fluid velocimetry has been described. Preliminary experiments in a convective flow with a continuous He-Ne laser have shown the feasibility of measuring 3-C velocity fields in one plane. For 3-D, 3-C velocity measurements a multiple light sheet illumination with controlled optical path length is proposed. A preliminary setup with two light sheets has shown the feasibility of independently obtaining information form each fluid plane. Quantitative measurements are expected to be possible when using a pulsed laser. REFERENCES 1. U. Schnars and W.P.O. Juptner, “Digital recording and numerical reconstruction of holograms”, Meas. Sci. Technol., 13, R85-R101, 2002. 2. K. Creath, “Phase-shifting speckle interferometry”, App. Opt., 24, 18, 3053-3058, 1985. 3. G.Pedrini, P. Froning, H. Fessler, H. J. Tiziani, “In-line digital holographic interferometry”, App.Opt., 37, 26, 6262-6269, 1998. 4. U. Schnars, “Direct phase determination in hologram interferometry with use of digitally recorded holograms”, J. Opt. Soc. Am. A, 11, 7, 2011-2015, 1994. 5. G. Pedrini, S. Schedin, H. J. Tiziani, “Lensless digital-holographic interferometry for the measurement of large objects”, Opt. Comm.,171,29-36, 1999. 6. T. Fricke-Begemann, J. Burke, “Speckle interferometry: three-dimensional deformation field measurement with a single interferogram, App. Opt., 40, 28, 5011-5022, 2001. 7. H.O. Saldner, N.E. Molin, K. A. Stetson, “Fourier-transform evaluation of phase data in spatially phase-biased TV holograms”, App. Opt., 35, 2, 332-336, 1996. 8. S. Schedin, G. Pedrini, H.J. Tiziani and F. Mendoza Santoyo, “Simultaneous three-dimensional dynamic deformation measurements with pulsed digital holography”, App. Opt, 38, 7056-7062, 1999. 9. P. Gren, “Pulsed TV holography combined with digital speckle photography restores lost interference phase”, App. Opt., 40, 14, 2304-2309, 2001. 10.I. Grant, “Selected papers on particle image velocimetry”, SPIE Milestone Series MS99. SPIE Optical Engineering Press, Bellingham, Wash, 1994 11.M.P. Arroyo, N. Andrés, M.Quintanilla, “The development of full field interferometric methods for fluid velocimetry”, Opt. Laser Technol., 32, 535-542, 2000. 12.T.M. Kreis, “Frequency analysis of digital holography”, Opt. Eng., 41, 4, 771-778, 2002. 13.M.P. Arroyo and J.M. Savirón, “Rayleigh-Bénard convection in a small box: spatial features and termal dependence of the velocity field”, J. Fluid Mech., 235, 325, 1992 284 Proc. of SPIE Vol. 4933