5th International Symposium on Particle Image Velocimetry PIV’03 Paper 3250
advertisement

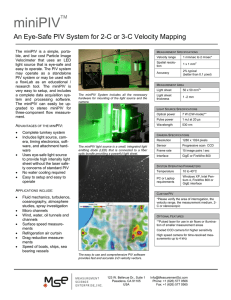
5th International Symposium on Particle Image Velocimetry Busan, Korea, September 22-24, 2003 PIV’03 Paper 3250 Advanced PIV algorithms with image distortion - Validation and comparison from synthetic images of turbulent flow B. Lecordier and M. Trinité Abstract In the present paper, two advanced PIV algorithms are described and compared with conventional crosscorrelation sub-pixel PIV technique. The first algorithm is an iterative continuous windows shift technique (CWS). The second, based on the same velocity calculation, includes an image distortion module to improve measurement of velocity gradients. The validation and the comparison of PIV algorithms are performed thanks to synthetic images, on which turbulent flow with homogeneous and isotropic properties are imposed thanks to direct numerical simulation. Comparison and limitation of PIV algorithms to measure velocity fluctuations, vorticity field, spectrum or other relevant turbulence parameters are studied. 1 Introduction Nowadays, the Particle Image Velocimetry (PIV) is a well-developed measurement technique, which is widely used for fundamental researches and industrial applications. In the past five years, in order to improve accuracy of velocity measurements, numerous advanced PIV algorithms have been proposed. Nevertheless, up to now, the intrinsic limitations of algorithms are not always well established, and especially their limitations to investigate turbulent flows in terms of scales, energy and spectrum. Various experimental studies using academic flows such as grid turbulence, wind tunnel or pipe flow have been used to try to evaluate in a real configuration the capability of the PIV technique to extract information from turbulent PIV vector maps. Unfortunately, it is always difficult to know and conclude which advanced PIV treatment is the most accurate or the most appropriated to measure a given flow characteristic. Indeed, experimental parameters such as the energy spectrum or scales of turbulence being known with experimental uncertainties, the comparison of PIV algorithms is tricky. In addition, from experimental validations, it is quite difficult to evaluate which main experimental settings (seeding density, laser, particle size…) are the more restrictive for the accuracy of the PIV technique. The primary objective of this paper is to compare the usual PIV treatments proposed in the literature with advanced PIV algorithms. These comparisons and the improvements should lead to a better evaluation of the intrinsic limitation of the different PIV algorithms, and especially their limitations in terms of measurement of turbulence properties. That comparison is performed from a fully digital approach based on synthetic images of particles. The main idea consists in producing realistic synthetic images of particle with known turbulent velocity fields. In that contest, direct numerical simulation of multi-phase flow has been used to generate digital turbulent flow field and particle field with known homogeneous and isotropic properties (Lecordier et al. 2001). The synthetic images are produced thanks to the Synthetic Image Generator (S.I.G.) developed in the framework of the EUROPIV II European project. A detailed description of the SIG is given elsewhere in reference (Lecordier et al. 2003) In the present paper, three different PIV algorithms are described and compared in terms of measurements of Fig. 1. Principe of different window interrogation management Correspondence to: Bertrand Lecordier - UMR 6614 CNRS CORIA - Technopôle du Madrillet BP12, Avenue de l’Université F-76801 Saint-Etienne-du Rouvray - Cedex (France) – http://www.coria.fr E-mail: Bertrtand.Lecordier@coria.fr 1 PIV’03 Paper 3250 turbulence properties: a conventional cross-correlation method with subpixel accuracy (CPIV), a continuous window shift technique using a predictor/corrector iterative process (CWS) and an original algorithm including an image distortion module (MDPIV). The section below describes the 3 different PIV algorithms with more attention on the approach with image distortion technique. In the following section, the results of the comparison of the PIV algorithms from synthetic images will be presented. The main conclusions are summarized in the final section. Fig. 2. Principle of the measurement of a uniform velocity gradient by using rotated interrogation window 2 Description of the different PIV algorithms The three next sub-sections contain a description of the different PIV algorithms compared in the present paper. We shall consider 3 different PIV treatments: • Conventional sub-pixel PIV treatment (CPIV). • Continuous window shift technique (CWS). • Multi-grid shift technique with image distortion (MDPIV). 2.1 Conventional sub-pixel PIV method (CPIV) This algorithm consists in cross-correlating small corresponding windows sample at the same location in the two successive images of particles (cf. figure 1). The normalised 2D correlation signal is obtained by using the Fast Fourier Transform (FFT) technique and the peak location is determined with sub-pixel accuracy. In the present work, 2D Gaussian peak interpolation method has been used (Lourenco and Krothapalli, 1995). A detailed description of the conventional cross-correlation PIV method is beyond the scope of this paper and details can be found elsewhere in references (Willert and Gharib, 1991; Huang et al., 1993). The conventional PIV approach has several drawbacks and one of the sources of uncertainty is introduced by the in-plane particle displacement. To overcome this problem, iterative discrete offset of the interrogation windows can be adopted (cf. figure 1) (Scarano and Riethmuller, 1999). The main advantages are the increasing of the dynamic range and the improvement of space resolution by reducing the size of interrogation windows. 2.2 Sub -pixel iterative approach (CWS) (Lecordier 1997, 1999) The main idea of that PIV method consists in an iterative measurement technique of particle displacement, which tends progressively toward the measure of zero displacement, namely, the most accurate detectable displacement by the cross- correlation algorithm. To do that, our algorithm introduces an iterative shifting technique of the interrogation windows to reduce in-plane particle motion effects, but contrary to the discrete windows offset technique, the windows are shifted in fraction of pixel. Thus, after a few iterative loops, the correlation peak is centred on the origin of the correlation space and so the measured velocity is nearly equal to zero. The iterative loop is stopped when the “maximum” possible resolution is reached. The second originality of our treatment is the alignment of the interrogation windows with the local direction of the particle displacement (cf. Fig. 1). So, during the treatment, the window size could be reduced in the direction perpendicular to the displacement to enhance the space resolution and reduce effects of velocity gradients (cf. Fig. 2). The tricky part of our treatment is the sub-pixel translation and rotation of the interrogation windows (Fig 3). The centre of the first and second interrogation windows are symmetrically shifted in the two images of particle and the magnitude of shift is obtained from the previous predicted particle displacement. Next, the interrogation windows are oriented in order to align the windows with the predicted direction of the particle displacement. As presented in Fig. 3, each pixel (xp,yp) of the oriented window is then interpolated from 25 neighbouring pixels sampled in the digital images of particles. The pixel value results from 5 horizontal and 1 vertical polynomial interpolations of degree 4. Each horizontal interpolation is performed from 5 horizontal pixels and they are used to estimate 5 grey levels at xp location in the vertical direction. Next, these 5 new values are interpolated to compute the grey level at (xp,yp) location in the oriented window. It must be emphasised that the method is independent of the interpolation directions and that 5 vertical and 1 horizontal interpolations lead to the same result. A simpler image interpolation method can be used without dramatically influencing the velocity measurements. Nevertheless, in a few situations such as an alignment of particle displacement with the pixel mesh, velocity uncertainties can increase significantly. 2 PIV’03 Paper 3250 Fig. 3. Principle of the translation and orientation of an interrogation window To avoid the divergence of computation, between successive loops, the estimated velocity field is validated thanks to 3 different methods based on: the minimum signal to noise ratio of the correlation signal, the vector magnitude and neighbouring comparison with a median filtering. The spurious vector are interpolated using the DAM method describes in the next section and the result is used as the next estimated velocity field. It can be noticed that our sub-pixel iterative method does not dramatically increase the computer load. The computation time is only 3 times longer than the conventional PIV approach. Indeed, the number of loop needed to measure residual displacement smaller than 0.05 pixel is generally smaller than 3. 2.3 Multi-grid continuous window shift technique with image distortion (MDPIV) As described in the previous section, the CWS treatment leads to increase the dynamic range (window translation) of measurement, reduce in-plane particle motion and “peak-locking” effects (Westerweel J., 1998; Lecordier et al. 1999, 2001) and in few cases improve the measurement of velocity gradient. Nevertheless, for large velocity gradients and small scales encountered in turbulent flows, the previous approaches present few limitations. In order to improve measurement of large velocity gradients, in the framework of the EUROPIV II project, we have associated to our CWS algorithm, an image distortion technique. Up to now, this approach, originally introduced by Huang et al., 1993, was inapplicable to large dataset due to very long computer delay. Within the last past years, the rapid improvement of computer performances leads to reconsider the advantages of image distortion methods, even when large datasets of particle images have to be analysed. The main idea of our image distortion method consists in cancelling as far as possible the particle displacement on the images of particle. This iterative process of deformation is started (step n=0) by a first estimation of the velocity (u0,v0 ) field from the initial images I 0 and J 0 . Next, two deformed images I1 and J1 (step n=1) are obtained by removing the first predicted velocity field in the initial images. A new velocity field, called corrector (u1c,v1c ) , is then computed from the deformed images and added to the initial velocity field (u0,v0 ) . The next steps consist in a successive iterative computation of a new corrector followed by a distortion of the initial images. The iterative process is stopped when parameters as mean, fluctuation and maximum velocity magnitude of the corrector velocity (unc,vnc ) field become smaller than defined values. Examples of successive corrector velocity fields are presented in Fig. 4. The initial step 0 corresponds to the result of the CWS algorithm from initial images I 0 and J 0 . During the iterative process of deformation, the size and intensity of residual structures is decreasing. At the last step, the corrector velocity field is nearly equal to zero and so indicate that the deformed images perfectly matched together. The final velocity field is then obtained from the equations: Fig. 4. Corrector velocity fields at different steps of the deformation 3 PIV’03 Paper 3250 i =n un(x, y)=u0(x, y)+∑uic(x, y) i =1 i =n vn(x, y)=v0(x, y)+∑vic(x, y) i =1 At the step n, to deform the initial images I 0 and J 0 from the velocity field (un,vn) , each pixel into the deformed images I n +1 and J n +1 is relocated using the expressions: u (i, j) vn(i, j) I n +1(i, j)= I 0(x p, y p)= I0 i − n , j− 2 2 u (i, j) vn(i, j) J n +1(i, j)= J 0(xq, yq)= J 0 i + n , j+ 2 2 where un(i, j) and vn(i, j) are the velocities at the pixel location (i, j) . The expressions I 0(x p, y p) and J 0(x p, y p) correspond to image intensity interpolated at the locations (x p, y p) and (xq, yq) and are obtained from the interpolation scheme described in section 2.2. In (x p, y p) and (xq, yq) expressions, the velocity field [un(i, j),vn(i, j)] can be outside of the velocity mesh. In this case, the velocity field is interpolated by using a diffuse approximation method (DAM) of third order (Prax and Sadat, 1996; Hamel et al., 2000). This high order approximation, able to take into account the effect of flow rotation and dilatation, permits us to cancel on the images the effects of velocity gradients without a direct calculation of velocity derivatives. It can be noticed that the accuracy of velocity interpolation is a more critical point than the image interpolation procedure. A no adapted interpolation scheme introduces significant errors during the measurement of corrector velocity field as oscillation phenomena, noise addition or over-estimation of intensities of vortices. To evaluate accuracy of different velocity interpolation schemes, a fixed number of vectors has been randomly removed from a known velocity field and next, each removed vector has been interpolated and compared to the initial value. The relative errors of two interpolation schemes for u and v are plotted in Fig. 5. For an inverse-distance weighting method with gaussian kernel (left distribution), the relative error reaches up to 4% whatever the velocity and is around 20 times larger than for the DAM of 3rd order (right distribution). In addition, the DAM being based on statistical approach, it is low sensitive to noise and so adapted to experimental data. In addition this interpolation provides accurate estimation of flow derivatives up to the second order. Between two successive image deformations, the corrector velocity fields are obtained from our CWS algorithm previously described. During the image deformation process, additional noises can be added if the corrector velocity fields contain spurious vectors. So, in order to avoid noise addition and then propagate errors, at each step, the predictor velocity field is validated and spurious vectors are replaced by using the diffuse interpolation scheme. This result of velocity validation is also used as an input to adjust a multi-grid technique in our CWS computation. Indeed, in order to reach as fast as possible the final solution and then reduce the number of deformation, at each step, the interrogation window sizes are locally adjusted from the validation of intermediate velocity field. The size is reduced when the previous vector is validated and it is increased if the vector is considered as spurious. A process of dichotomy fixes the magnitude of size variation. The iterative computation is stopped when the window size distribution has converged. Other multi-grid techniques are based on different parameters as the local velocity gradients or flow curvature (Scarano, 2002). 3 Validation of the PIV algorithms by using Direct Numerical Simulation and synthetic images 3.1 Introduction In order to evaluate the accuracy and the intrinsic limitations of each PIV algorithm, we have used synthetic images of particle, which simulate a turbulent flow conditions. The synthetic images are obtained from the common Synthetic Image Generator (S.I.G.) developed within the EUROPIV-2 project (contract G4RD-CT-2000-00190). A detailed 4 Fig. 5. Relative error between removed vectors from known velocity field (30 %) and interpolation vectors. Interpolation method: inverse-distance weighting interpolation method with gaussian kernel (left) and DAM of 3rd order (right). PIV’03 Paper 3250 CWS (32x32 Pixels) MCPIV (32x32 Pixels) .Fig. 6. Effect of the image deformation technique to improve measurement of velocity gradients description of the SIG is given elsewhere in this reference (Lecordier et al 2003). The flow condition imposed on synthetic images is a homogeneous and isotropic turbulent flow without mean velocity. The description to produce such images by using Direct Numerical Simulation of two-phase flow may be found in the reference (Lecordier et al., 2001). The main idea consists in generating synthetic images from successive 2D or 3D particle fields produced thanks to a Direct Numerical Simulation of multi-phase flow. The successive locations of each particle are used to generate couple of synthetic images. In the present work, the parameters of the simulation have been maintained constant and are summarized in Table 1. These flow parameters for a 2D simulation. Table 1 Parameters of the Direct Numerical Simulation Mesh 2 1024 Size [m] 0.1x0.1 kt [m2/s2] 1.12 ε [m2/s3] 31.8 u’ [m/s] 1.06 lint [mm] 6.44 lλ [mm] 1.66 η [mm] 0.1 Reλ Npart 200 32.105 The parameters to generate synthetic images have been adjusted to produce realistic images with properties similar to those recorded in a large wind tunnel at around 1 m. These parameters have been determined by comparing synthetic and real images properties in terms of mean and RMS grey levels and width and dispersion of self-correlation signal. The last point is important to adjust the size of the particle and then simulate complex effects as “peak-locking”. The laser sheet has a gaussian shape and a thickness of 800 µm defined at 10e-2 of intensity profile. The image size is 1024x1024 with a magnification factor of 0.0977 mm/pixel, which leads to a size of the Kolmogorov scale close to one pixel. The velocities are in a range of ± 3 m/s or ± 4.6 pixels. 3.2 Effect of image deformation on the measurement of velocity gradients In Fig. 6 is presented an example of velocity measurement from our synthetic images. In that example, the two velocity fields have been computed with the same interrogation window size: 32x32 pixels (≈ 3x3 mm2). The result of the CPIV computation (left plot) presents few spurious vectors, localized near the center of vortices, where intense velocity gradients are encountered. From the same images, the results obtained by the MDPIV algorithm (right plot) does not exhibit spurious vector in these areas. From this very simple observation, it is clear that, at equivalent size of interrogation window, the image deformation technique is less sensitive to velocity gradients than convention PIV technique. 5 PIV’03 Paper 3250 Fig. 7. Comparison of imposed vorticity field by DNS (left) with the conventional PIV (CPIV 32x32 - centre) and the advanced PIV algorithm with image deformation (MDPIV - right) Fig. 8. Distribution of the velocity component (v) for 3 PIV algorithms In order to look closer to the effect of velocity gradients on the velocity measurement, a second study has been focus on the local measurement of the vorticity field. In Fig. 7 is presented an example of comparison of vorticity measurement for the CPIV and MDPIV algorithms. The vorticity field on the left corresponds to the simulation and the black curve is one horizontal profile. From these results, the low-past filtering effect of the conventional PIV technique (CPIV – centre plot) is clearly observed. The mean level of vorticity is well estimated but the maximum of intensity of smallest flow structures are underestimated. That effect is clearly observed by comparing the imposed profile and the measured profile (red curve). On the contrary, the low-pass filtering effect is less pronounced for the PIV treatment including image distortion module (MDPIV - right plot). In that case, the vorticity field is close to the imposed values and the two profiles are nearly identical except very close to the maximum of voticity levels, where slight differences can be observed. The difference of behaviour between CPIV and MDPIV has been observed from numerous simulations with different turbulence intensities and then suggests to us that PIV with image deformation has more potential than CPIV to resolved strong velocity gradients. In the next section, we will analyse if the improvements introduced by the deformation lead also to improve the measurement of turbulence properties. 3.3 Measurements of turbulence properties. The measurement of turbulence properties from PIV technique has been investigated from 20 couples of synthetic produced from 20 independent simulations, initialised with the same turbulence properties. In Fig 8 is presented the reconstruction of the velocity distribution (u component) for 3 PIV algorithms. The imposed distribution is plotted in red colour. The 3 PIV distributions are always well centred on zero and then shown that the mean velocity is well estimated. For the CPIV technique (left distribution), the “peak-locking” effect can be observed as on the real images. This effect is cancelled from CWS and MDPIV algorithms. That improvement is the result of the iterative and continuous window shift technique, (Lecordier et al. 1999, 2001). On the other hand, for the CPIV and CWS techniques, the distributions present an overestimation close to zero and a minimisation of the distribution tails. For the MDPIV algorithm, the distribution (right plot) is very close to the simulation and then, should lead to a better estimation of the statistical parameter of turbulence. That remark has been confirmed by the measurement of the kinetic energy of turbulence. Indeed, in Fig. 9 is presented the kinetic energy and the dissipation rate for different algorithms and interrogation window size. In these plots, the red bars Fig. 9. Kinetic energy and dissipation rate represent the simulation. It must be emphasized that these measurements from CWS and MDPIV algorithms values are smaller than the imposed value because for the with different interrogation window sizes comparison, the DNS results are analysed with the same 6 PIV’03 Paper 3250 methods than the PIV velocity field. In addition, the analyses are performed with the PIV mesh, which have grid distance 4 times larger than the initial DNS mesh, and then reduce the maximum value of the spatial derivatives. For the kinetic energy (left plot) and the dissipation rate (right plot), the effect of the interrogation window size is clearly observed. For the CWS technique, the PIV results get closer and closer to the imposed values as the window size decreases. Nevertheless, the size could not be smaller than 16x16 pixels without significantly increasing the number of spurious vector (≈20%). On the other hand, by using the image deformation (MDPIV), the size can be decreased up to 8x8 pixels without introducing spurious vectors and then leads to a better estimation of the turbulence properties, even so low Fig. 10. Comparison of turbulence spectrum noise addition slightly overshoots the imposed values. from iterative PIV (CWS) and algorithm with In Fig. 10 is presented the turbulence spectrum obtained image deformation (MDPIV). from 20 velocity fields. The continuous line corresponds to the simulation and CPIV method is not reported in this plot. Indeed, the results of CPIV in term of scales are very similar to those of the CWS technique. From these results, relevant information about PIV accuracy of measurement of turbulent scales, cut-off frequency and noise level can be extracted. For the low frequencies, all the algorithms have the same behaviour and slightly underestimate the spectrum of simulation. This effect is imputed to the low number of velocity fields, which does not allow a sufficient statistic for the large scales. On the other hand, the number of the small scales in each velocity field being much higher than large scales, the statistic is sufficient for the high frequencies. In Fig. 10, for all the PIV method, the cut-off frequency links to the algorithm itself is always smaller than the one due to computation noise (rise of spectrum). That point is very important and then allows us to evaluate the maximum expectable frequency accessible from a given algorithm. The cut-off frequency of CWS technique is always lower than the one of MDPIV. Nevertheless, from the results in Fig. 10, it is clearly show that whatever the algorithm, the cut-off frequency is always strongly linked to the size of the interrogation window. Indeed, the cut-off frequencies are always very close to the theoretical values (dashed lines in Fig. 10) defined by Foucault and al. (2002) and equal to 2.8/∆, where ∆ is the size of the interrogation window. As an important result, the main advantage of the deformation is so to progressively cancel the displacement on the images and then it permits to reduce and reach size of interrogation window, which cannot be considered from CPIV or CWS method, and that without dramatically increasing the number of spurious vectors. 5 Conclusions An original PIV algorithm, including an image distortion technique has been proposed and described. Its validation and its comparison with two other PIV methods have been done thanks to synthetic images, on which turbulent flow with homogeneous and isotropic properties are imposed from to direct numerical simulation. Comparison and limitation of PIV algorithms has been investigated in terms velocity fluctuations, dissipation, vorticity field and spectrum. The distortion technique has presented high potentialities to improve measurement in turbulent flow and to resolve larger velocity gradient than conventional PIV algorithms. From the study of turbulence spectrum, it has been shown that the cut-off frequency of all PIV algorithms is always strongly linked to the size of the interrogation window. Nevertheless, the main advantage of the deformation technique is to reduce and to reach sizes of interrogation window, which cannot be considered from the other PIV techniques. Next, It will be interesting to investigate the effect of the out-off plane particle motion on the measurement of turbulence properties. Indeed, when the main flow is along the z-axis, the accuracy of PIV measurement can be significantly reduced. Acknowledgements This work has been performed under the EUROPIV2 project. EUROPIV2 (A joint program to improve PIV performance for industry and research) is a collaboration between LML URA CNRS 1441, DASSAULT AVIATION, DASA, ITAP, CIRA, DLR, ISL, NLR, ONERA and the universities of Delft, Madrid, Oldenburg, Rome, Rouen (CORIA URA CNRS 230), St Etienne (TSI URA CNRS 842), Zaragoza. The project is managed by LML URA CNRS 1441 and is funded by the European Union within the 5th framework (Contract N°: G4RD-CT-2000-00190). 7 PIV’03 Paper 3250 References: Hamel V.; Roelandt J.; Gacel J.; Schmit F. (2000). Finite element modelling of clinch forming with automatic remeshing. Computers and Structures, 77:185–200. Foucault J.M. and Stanislas, (2002) M. - Some considerations on the accuracy and frequency response of some derivative filters applied to particle image velocimetry vector fields - Meas. Sci. Technol. 13 1058-1071 Huang H.; Fielder H.; Wang J. (1993). Limitation and Improvement of PIV: Part II. Experiments in Fluids, 15:263–273. Lecordier B. (1997). Etude de l’intéraction de la propagation d’une flamme prémélangée avec le champ aérodynamique, par association de la tomographie laser et de la vélocimétrie par images de particules. PhD thesis, Université de Rouen. Lecordier B.; Lecordier J.C and Trinité M. (1999). Iterative sub-pixel algorithm for the cross-correlation PIV measurements - In 3rd International Workshop on PIV, Santa Barbara. Lecordier B.; Demare D.; Vervisch L.; Réveillon J.; Trinité M. (2001). Estimation of the accuracy of PIV treatments for turbulent flow studies by direct numerical simulation of multi-phase flow. Meas. Sci. Technol., 12:1382–1391. Lecordier B., Westerweel J. and Nogueira J. (2003), The EUROPIV Synthetic Image Generator (S.I.G.). To be publish in book – Ed. Springer Lourenco L.; Krothapalli A. (1995). On the Accuracy of Velocity and Vorticity Measurements with PIV. Experiments in Fluids, 18:421–428. Prax C.; Sadat H. (1996). Collocated diffuse approximation method for two dimensional incompressible channel flows. Mechanics Research Communication, 23:61–66. Scarano F. (2002). Iterative image deformation method in PIV. Meas. Sci. Technol., 13:R1–R19. Scarano F.; Riethmuller M. (1999). Iterative muligrid approach in PIV image processing with discrete window offset. Experiments in Fluids, 26:513–523. Westerweel J. (1998). Effect of Sensor Geometry On the Performance of PIV Interrogation. In Ninth International Symposium on Application of Laser Techniques to fluid Mechanics - Lisbon 13th-16th 1998, pages 1.2.1–1.2.8. Willert C.; Gharib M. (1991). Digital Particle Image Velocimetry. Experiments in Fluids, 10:182–193. 8