Measurement Uncertainty of Stereoscopic-PIV for Flow with Large Out-of-plane Motion.
advertisement
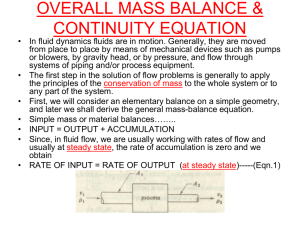
Measurement Uncertainty of Stereoscopic-PIV for Flow with Large Out-of-plane Motion. C.W.H. van Doorne, J.Westerweel and F.T.M Nieuwstadt Laboratory of Aero- and Hydrodynamics, Delft University of Technology and J.M. Burgerscentrum, The Netherlands; c.w.h.vanDoorne@wbmt.tudelft.nl, j.Westerweel@wbmt.tudelft.nl, f.t.m.Nieuwstadt@wbmt.tudelft.nl. Abstract A stereoscopic-PIV system was developed to operate with the light sheet oriented perpendicular to the main flow direction, which makes it possible to measure the streamwise vorticity. The SPIV system is based on an angular displacement of 45 degrees of the two cameras and a 3D calibration based reconstruction method. It was expected that the large out of plane motion would limit the accuracy of the measurements, which was therefore investigated in detail for laminar and turbulent pipe flow. The laminar flow measurements revealed the importance of a precise alignment of the light sheet with respect to the calibration plane. Small misalignments lead to unacceptably large so called registration errors. Although the registration error was described by several authors before, it has never been properly quantified. We explain and predict the amount of registration error and check this with direct measurements. After alignment, the laminar velocity profile and turbulence statistics were reproduced with very high accuracy, which proves the applicability of SPIV to flows with large out of plane motion. At the end of the paper an example is presented of the application of the SPIV system to the study of transition in pipe flow. 1 Introduction The transition from laminar to turbulent pipe flow is still far from being understood. One of the difficulties is that the laminar parabolic velocity profile is linearly stable. This means that transition must start from a disturbance with finite amplitude, although the disturbance may have any form. A frequently used disturbance is periodic blowing and suction from the wall, see e.g. Ma et al. (1999) and Eliahou et al. (1998). In the future we will study the downstream evolution of such flow perturbations with the stereoscopic-PIV system and compare the results to DNS simulations and theoretical work. Our research is a continuation of the work by Draad et al. (1998) and Westerweel et al. (1996), who considered a jet-like flow disturbance in laminar pipe flow 214 Session 4 and reconstructed a turbulent slug by combining a sequence of PIV data fields. Compared to the previous experiments the orientation of the light sheet has changed and is now perpendicular to the pipe. The reason for such orientation of the light sheet is that we want to measure the streamwise vortices as they appear in the DNS simulations of Ma et al. (1999). A second advantage of the out-of-plane flow orientation is that for time resolved measurements, we can, in a first approximation, reconstruct the 3D flow field using the Taylor-hypothesis. In this paper we will present the SPIV setup that was developed for transition measurements in pipe flow and discuss the measurement uncertainty of the system in great detail. Special attention is paid to registration errors. Although the registration error was described by several authors (Coudert and Schon 2001, Pradad 2000, Willert 1997, Prasad and Adrian 1993), it has never been properly quantified. Having a laminar shear flow at hand (Poiseuille flow), we were able to measure the registration error directly and verify our conceptual understanding and predictions. The measurements in turbulent pipe reproduced the turbulence statistics accurately and show the ability of the system to measure small velocity fluctuations. The transition measurement presented at the end of this paper is a good example of the kind of experiments we will conduct in the near future. 2 Experimental Set-up and Procedures In this section we describe the experimental setup and measurement procedures. An overview of the experimental parameters is presented in Table 1 and a sketch of the SPIV system is shown in Fig. 1. Fig. 1. Schematic of experimental setup. Applications 215 For our measurements we use a pipe flow facility with an inner diameter of 40 mm and a total length of 30 m. A detailed description of the flow facility is given by Draad (1996). The working fluid is water, and due to a well designed contraction and thermal isolation of the pipe, the flow can be kept laminar up to Re = 60.000. All measurements were carried out at 26 meters from the inlet. The PIV images were recorded with two Kodak ES 1.0 cross-correlation cameras, which operate at 15 Hz and give 8-bit images of 1008×1008 pixels. Both cameras look at an angle of 45° to the object plane and satisfy the Scheimpflug condition. The cameras are placed in the forward scattering direction of the laser light and therefore stand on different sides of the light sheet (Willert, 1997). Sphericel particles of 10 mico-meter were added to the water to increase the particle density. A substantial part of the particles remains in suspension and makes it possible to measure in laminar and transitional flows. The flow is illuminated by a dual-cavity frequency-doubled pulsed Nd:YAG laser with a maximum energy of 200 mJ/pulse (Spectra Physics PIV-200). The light sheet is formed with 2 lenses and a mirror on a micro traverse makes it possible to change the position of the light sheet. Table 1. Overview of relevant experimental conditions. Pipe Flow Seeding Light sheet Recording Interrogation diameter length wall thickness fluid Reynolds number bulk velocity type diameter laser type maximum power thickness camera type viewing angles resolution repetition rate lens focal length f-number image magnification viewing area exposure delay time maximum particle displacement method resolution area 40 30 1.6 water 5300 130 Sphericel 10 Nd:YAG 200 1.5 Kodak ES 1.0 45 1008×1008 15 50 5 0.22 40 × 57 2 8 3D calibration 32 × 32 1.3 × 1.3 mm m mm mm/s µm mJ/puls mm deg px Hz mm mm² ms px px mm² 216 Session 4 To minimise optical distortion of the image, the pipe inside the test section is replaced by a 1.6 mm thick glass tube and two water prisms are placed in front of the test section (Prasad 2000). The light sheet is perpendicular to the mean flow direction in order to measure the flow patterns associated with streamwise vortices. The light sheet thickness has a direct influence on the accuracy of the velocity measurements. A thick light sheet leads to a reduced spatial resolution not only in the z direction, but also in the x and y directions, because the cameras look under 45 degrees to the light sheet. For a thin light sheet however, the particle displacements are limited to relatively small values, because the out of plane displacement should remain less than ¼ of the light sheet thickness. This results in a low signal to noise ratio. We used a light sheet thickness of approximately 1.5 mm, which seems to be a good compromise between the spatial resolution and the signal to noise ratio. Particle displacements up to 8 pixels (0.45 mm) give a good correlation, and under optimal conditions we can resolve displacements with a precision better than 0.1 pixel, which is approximately 1% of the maximum displacement. In transitional flow, the velocity fluctuations are also of the order of a few percent of the bulk velocity, from which we can conclude that the signal to noise ratio will be rather low. Fig. 2. Photo of calibration grid on holder. The reconstruction of the 3C-vector fields from the two displacement fields of the cameras is based on a 3D calibration of the system (Soloff et al. 1997, Prasad 2000). The calibration grid is recorded at two z-positions (instead of one for a 2D calibration), and the method does not require the input of any geometric parameter of the setup. The calibration grid (figure 2) is a 2 mm spaced lattice of 0.5 mm thick dots printed on a transparency sheet and glued between two 0.5 mm thick glass plates. The grid is kept in position by a transparency sheet (0.1 mm thick) rolled into a cylinder, which in turn is held by a plastic rod, which precisely fits into the pipe. The cylindrical transparency sheet forms a solid support for the grid Applications 217 and allows for optical access to both sides of the grid without any noticeable optical distortion. To place the calibration grid in the pipe, a special water tank is placed behind the test section (figure 3). After calibration the tank must be removed and the system is closed again. A small change in position of the test section would make the calibration useless, and therefore the test section is fixed firmly to a support. Fig. 3. A water tank is placed behind the test section to enter the calibration grid in the pipe and to traverse it. The data acquisition system is a commercial system from LaVision including the software (Davis 6.1.1) used to evaluate the vector fields. The vector analysis is done in two steps. In the first step we use 64×64 fixed interrogation windows, after which spurious vectors were detected with a median filter (Westerweel 1994) and replaced by either a vector of a lower correlation peak or an interpolation of the neighbouring vectors. In the second step we use 32×32 pixel interrogation regions, and the vector fields of the first step are used for preshifting (Westerweel et al. 1997). Again spurious vectors are removed and if possible replaced by a vector from a lower correlation peak, but the spurious vectors are not replaced by interpolated data. After this the vector fields of both cameras are dewarped and recombined (using the 3D calibration) to obtain the 3C-vector field. 3 Measurement Uncertainty Prasad (2000) gives an overview of different SPIV systems and equations that have been derived to calculate the 3C-vectors field from the two 2C-vector fields 218 Session 4 from the cameras. In all equations the real displacements (dx, dy and dz) are linear functions of the displacements (dx1, dy1) seen by camera 1 and (dx2, dy2) seen by camera 2. The proportionality constants depend on the geometry and exact location (x, y) in the object plane. A general expression given by Willert (1997) reads: dx = dx2 ⋅ tanα1 − dx1 ⋅ tanα 2 tanα1 − tanα 2 dy1 − dy2 dz dy = + (tanβ 2 − tanβ1) 2 2 dx2 − dx1 dz = tanα1 − tanα 2 (1) More elaborate error analysis does not only take into account the interrogation errors (PIV correlation noise) in dx1, dy1, dx2 and dy2, but also the errors in all proportionality constants. In the case of a 2D calibration method this will include e.g. uncertainties in the nominal magnification factor and the distance between the lenses (Prasad 2000). For a 3D calibration method the uncertainty in the proportionality constants is probably very small, because they are derived from the calibration. The exact uncertainty is very hard to estimate and will depend on both the calibration images and the mathematical methods used to derive the constants. If we are only interested in an estimate of the errors, the analysis can be simplified. We assume that interrogation errors will dominate (in our 3D calibration method) and that they are all of the same order (i.e. rms(dx1) ≈ rms(dy1) ≈ rms(dx2) ≈ rms(dy2) ≈ σint ). After substitution of the characteristic angles of our geometry ( α 1 = 45°, α 2 = 135°, β 1 = β 2 = 0°) in (1) we obtain: dx ≈ −dx1 + dx2 2 σdx ≈ σint dy1 + dy2 1 (2) dy ≈ ⇒ σdy ≈ 2 ⋅ σint 2 2 dx1 + dx2 σdz ≈ σint dz ≈ 2 As σint typically is of the order of 0.1 px (Westerweel et al. 1997) we find σdx = σdz = 0.1 px and σdy = 0.07 px. 3.1 Registration error In the derivation of (2) it was assumed that the error in dx1, dy1, dx2 and dy2 is solely due to the PIV interrogation noise. In stereo-PIV, however, an additional error comes into play: the registration error. Although the registration error was described by several authors (Coudert and Schon 2001, Pradad 2000, Willert 1997, Prasad and Adrian 1993), it has never been properly quantified. In the following we will measure and explain the registration error and discuss ways to minimise it. Applications 219 Fig. 4. The registration error in shear flow due to misalignment of the light sheet and the plane of the calibration target. A mismatch of the two back-projected vector fields from cameras 1 and 2 causes velocity information from different locations to become combined in the calculation of the three vector components, which causes the registration error. This would occur e.g. if the (dewarping) mapping function from the image plane to the physical plane is not accurate, which is not hypothetical for geometric reconstruction. In the case of 2D or 3D calibrated systems, however, the mapping error is likely to be very small (less than 1 pixel). Registration errors also occur when the centre of the light sheet does not exactly coincide with the location of the calibration grid (i.e. the plane of backprojection in the physical space). Figure 4 shows this situation. In the point (z0,x0) on the calibration plane a 3C-vector (Vpiv) is reconstructed from the two 2C displacement vectors v’1 and v’2 , which were measured by camera 1 in (z1,x1) and by camera 2 in (z2,x2) on the measurement plane, i.e. the plane of the light sheet. To keep the explanation brief, we will investigate the special case for which α 1 = α 2 = 45° and the measurement takes place in a 2D shear flow as shown in figure 4. This is similar to a laminar flow in our setup. Writing: v1=v0+dv1 and v2=v0+dv2 , and considering the left part of figure 4, it can be seen that verr = dv1 = dv2 = ∂vz ∂x ⋅ dx and thus we find a registration error: e(vx) = ∂vz ∂x ⋅ dz (3) where dz is the misalignment of the light sheet with respect to the calibration plane. The derivation of a more general expression for arbitrary viewing angles and other shear directions is left to the reader. 220 Session 4 Fig. 5. Example of registration error in laminar pipe flow. Only ¼ of the vectors is displayed. Fig. 6. Average registration error in the rectangle shown in figure5 as a function of the difference between the positions of the light sheet and calibration plane. Applications 221 3.2 Measurement of the registration error For laminar pipe flow the velocity gradient is large close to the wall, and the inplane velocities vx and vy are zero. When the light sheet is misaligned the vx component is affected by the registration error e(vx). Figure 5 shows a vector field with a considerable registration error in the vx component. In the center of the pipe the velocity gradient is zero and no registration error occurs. The misalignment of the light sheet was varied by moving the mirror on the micro traverse back and forth (figure 1). The average of the registration error in the rectangle shown in figure 5 is plotted as a function of the misalignment of the light sheet in figure 6. A prediction of the registration error can be obtained from (3) and the shear rate of the parabolic velocity profile ∂vz ∂x (r) = −2 ⋅ vc ⋅ r R 2 , at a distance of 2 mm from the wall (r/R=0.9), where vc is the centerline velocity and R is the radius of the pipe. It follows that: e(vx) vc ≈ 1.8 ⋅ dz R . We can conclude that in order to measure vx with a precision of 1% of the centerline velocity, the misalignment of the light sheet and the calibration plane should be less than 0.1 mm. In turbulent flow the velocity gradients are even larger than in laminar flow, and the required alignment precision becomes even more stringent. 3.3 Minimization of the registration error The registration error depends on the flow gradients and therefore it is not a systematic error in a time dependent flow. The only way to overcome registration errors is to prevent a mismatched combination of the dewarped vector fields of cameras 1 and 2. Our solution to the problem is to measure the registration error in a laminar pipe flow, as discussed in the previous section. The position of the light sheet is then adjusted until the registration error becomes much smaller than the PIV correlation noise and therefore becomes negligible. In many experiments however, it is impossible to create a well-known laminar sheer flow and measure the registration error. Another method to test the correct recombination of the vector fields is to cross-correlate two dewarped images that were recorded at the same time by cameras 1 and 2 (Willert 1997, Coudert 2001). In the case that the light sheet and calibration plane are misaligned, the dewarped particle images do not fall on top of each other, and the displacement vectors found from the cross correlation are linearly proportional to the misalignment of the light sheet. The displacement field can then be used to correct the light sheet position, but it is probably more accurate and convenient to correct the dewarping functions. This method works very well with a thin light sheet, but for a thick light sheet the illuminated particles are located at different distances from the calibration plane, which results in varying distances between the dewarped particle image pairs, a wider correlation peak and increased noise in the correlation plane. We did not investigate the maximum light sheet thickness for which the cross-correlation 222 Session 4 still gives good results, but for PIV it is recommended that the particle displacements within one interrogation window should not differ by more than half the particle image size. We can thus expect the vector field of the cross correlation to become quite noisy as soon as the displacements of the dewarped particle pairs differ more than 2 or 3 pixels. In our case where the light sheet is 1.5 mm thick, the difference in the displacement of the dewarped particle pairs is about 25 pixels and the crosscorrelation did not work at all. It may well be that averaging over many images in the correlation plane will result in proper vector fields and make the crosscorrelation technique also applicable to a setup with a thick light sheet. 3.4 Laminar Flow After the calibration of the PIV system and the alignment of the light sheet, the first test was to measure the parabolic velocity profile of laminar pipe flow. A 3D graph of an instantaneous measurement of the streamwise velocity is shown in figure 7. Figure 8 shows the profiles of the instantaneous velocity ux along the xand y-axis, which should of course be zero and shows that the noise level is about 0.5% of the centerline velocity (i.e. the noise level is smaller than 0.1 pixel). Fig. 7. Instantaneous streamwise velocity in Fig. 8. Instantaneous cross-flow measured laminar flow at Re=3000. in laminar flow (= noise) at Re=3000. 3.5 Turbulent Flow To investigate the accuracy of the SPIV system in turbulent flow, we took measurements in fully developed turbulence at a Reynolds number of 5300, which was chosen to match the flow conditions of the DNS by Eggels et al. (1993). All statistics were computed from 900 independent vector fields and are plotted together with the DNS results for comparison. Figure 9 shows a typical vector plot of the in-plane velocity components. The mean velocity profile is shown in Fig. 10, the turbulence intensities in Fig. 11 and the Reynolds stress in Fig. 12. Applications 223 Fig. 9. Turbulent flow at Re = 5300. Fig. 10. Mean axial velocity profile. 224 Session 4 The friction velocity u* is used to normalize the data, and was calculated from the total stress at the wall in figure 12. The turbulence intensities and Reynolds-stress profile fall exactly on top of the DNS calculations. However, in the mean velocity profile there is a 5% difference between the SPIV and the DNS. The PIV method slightly underestimates the velocity fluctuations and the friction velocity. This is mainly due to the spatial averaging of the velocity in the interrogation windows in the PIV evaluation. When u* is estimated from the bulk velocity and the Blasius friction law or by direct measurements of the pressure drop, then the mean profile falls exactly on top of the DNS data, see the Ph.D. thesis of van Doorne (2003) for more details. Fig. 11. Turbulence intensities. 4 Transition Measurements The SPIV system is used to study transition to turbulence in laminar pipe flow. The one result we show in this paragraph is a preliminary result that illustrates the 3D reconstruction of structures in the flow. A turbulent region (slug) was triggered 150 pipe diameters upstream of the test section in laminar pipe flow at a Reynolds number of 2600. The passage of the slug trough the measurement plane was recorded at 15 Hz for 12 seconds. The Applications 225 time sequence of vector fields is stacked in the z-direction and the iso-surfaces of streamwise vorticity are shown in figure 13. The flow is from left to right. The cross-sections are 50 frames apart, which is 3.3 seconds, and is converted with the bulk velocity of 65 mm/s into a distance of 214 mm (i.e.5 pipe diameters). Fig. 12. Stress profiles. 5 Conclusions and Outlook The stereoscopic PIV system can measure the velocity with high accuracy over the entire cross-section of the pipe. The noise level of individual vectors is smaller than 0.1 pixel, and the turbulence statistics can be measured with high accuracy. The laminar flow measurements revealed the importance of a precise alignment of the light sheet with respect to the calibration plane. Misalignments as small as 0.1 mm will lead to large registration errors. The out-of-plane flow configuration makes it possible to measure the streamwise vorticity. Another principal advantage is that structures in the flow are advected by the main flow trough the measurement plane. If the SPIV measurements are time resolved, we can, in a first approximation, reconstruct the 3D structure of the turbulent flow using the Taylor-hypothesis. The structural information is extremely valuable in understanding transition in a pipe, and the approach can easily be extended to other flows as well. As a preliminary result we presented the 3D graph of the streamwise vorticity in a turbulent slug. More advanced measure- 226 Session 4 ments at a frame rate of 500 Hz show promising results which will be presented at an oncoming conference (van Doorne et al. 2003). Fig. 13. Iso-surfaces of streamwise vorticity measured in turbulet spot. References Coudert, S.J.M., Schon, J.P. (2001). Back-projection algorithm with misalignment corrections for 2D3C stereoscopic PIV, Meas. Sci. Technol.,Vol.12, pp13711381. Doorne, C.W.H.van, (2003) Stereoscopic PIV and visualisations on transition in pipe flow, Ph.D. Thesis, Delft University of Technology. Doorne, C.W.H.van, Hof, B., Lindken, R.H., Westerweel, J., Dierksheide, U., (2003) Time resolved stereoscopic PIV in pipe flow, visualising the 3D flow structures, Fifth International Symposium on PIV, September 22-24, Busan, Korea. Draad, A.A., (1996) Laminar-turbulent transition in pipe flow for Newtonian and non-Newtonian fluids, Ph.D. Thesis, Delft University of Technology. Draad, A.A., Kuiken, G.D.C., Nieuwstadt, F.T.M., (1998) Laminar-turbulent transition in pipe flow for Newtonian and non-Newtonian fluids, J. Fluid Mech., Vol. 377, pp.267--312. Eggels, J.G.M., Westerweel, J., Nieuwstadt, F.T.M. (1993). Direct numerical simulation of turbulent pipe flow. Appl. Sci. Res. Vol. 51, pp.319-324. Eliahou, S., Tumin, A., Wygnanski, I. (1998) Laminar-turbulent transition in Poiseuille pipe flow subjected to periodic perturbations emanating from the wall, J. Fluid Mech., Vol. 361, pp 333-349. Ma, B., Doorne, C.W.H., Zhang, Z., Nieuwstadt, F.T.M. (1999). On the spacial evolution of a wall-imposed periodic disturbance in pipe Poiseuille flow at Re = 3000. Part1. Subcritical disturbance, J. Fluid Mech., Vol. 398, pp. 181-224. Applications 227 Prasad, A.K., Adrian, R.J. (1993), Stereoscopic particle image velocimetry applied to liquid flows, Exp. Fluids, Vol. 15, pp. 49-60. Prasad, A.K. (2000), Stereoscopic particle image velocimetry, Exp. Fluids, Vol. 29, pp 103-116. Soloff, S.M., Adrian, R.J., Liu, Z.C. (1997). Distortion compensation for generalized stereoscopic particle image velocimetry. Meas. Sci. Technol., Vol. 8, pp. 1441-1454. Westerweel, J. (1994). Efficient detection of spurious vectors in particle image velocimetry data. Exp. Fluids, Vol. 16, pp. 236-247. Westerweel, J., Dabiri, D., Gharib, M., (1997). The effect of a discrete window offset on the accuracy of cross-correlation analysis of digital PIV recordings, Exp Fluids, Vol. 23, pp 20-28. Westerweel, J., Draad, A.A. (1996) Measurement of temporal and spatial evolution of transitional pipe flow with PIV, Development in laser techniques and fluid mechanics, 8th International Symposium, Lisbon, Portugal, 8-11 Luly, 1996, pp. 311-324. Westerweel, J., Draad, A.A., van der Hoeven, J.G.Th., van Oord, J. (1996). Measurement of fully-developed turbulent pipe flow with digital particle image velocimetry, Exp.Fluids, Vol. 20, pp. 165-177. Willert, C. (1997). Stereoscopic digital particle image velocimetry for application in wind tunnel flows. Meas. Sci. Technol., Vol. 8, pp1465-1479.
 0
0
advertisement

Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users