C.E. SYNOLAKIS F. RAICHLEN WAVES AND RUN-UP GENERATED BY A THREE-DIMENSIONAL SLIDING
advertisement

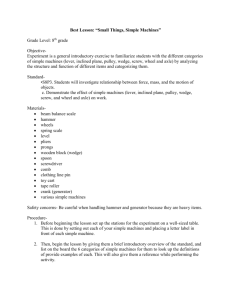
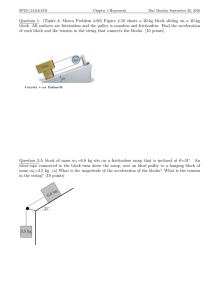
WAVES AND RUN-UP GENERATED BY A THREE-DIMENSIONAL SLIDING MASS C.E. SYNOLAKIS University of Southern California, School of Engineering, Los Angeles, CA, USA F. RAICHLEN Dept. of Civil and Mechanical Engineering, California Institute of Technology, Pasadena, CA 91125 Abstract Large-scale laboratory experiments were conducted measuring the waves generated by two wedge-shaped bodies sliding down a 2:1 slope. The waves near the body propagating offshore and the run-up generated on the slope were measured. It was determined that the maximum “draw-down” wave over the body was essentially generated before the body had moved more than one-half its length downslope. In addition to shape, the important parameters that controlled the run-up were the initial submergence and the initial acceleration of the body. 1. Introduction This investigation is directed to a better understanding of the three-dimensional run-up generated by subaerial and submarine landslides. It has become apparent in recent years that there may be a serious threat due to tsunamis generated near the shoreline by massive underwater landslides which propagate in an offshore direction. For example, in Skagway, Alaska in 1994 a large submarine landslide generated waves that caused several million dollars damage to harbor facilities and killed one person. This took place during construction of a new cruise ship wharf. If it had occurred when a ship had been moored and unloading passengers the results would have been catastrophic. A more recent event, which was indeed catastrophic, occurred in July 1998 in Papua New Guinea. More that 2000 lives were lost due to a tsunami associated with a relatively small (for tsunamis) earthquake of magnitude seven. Upon further investigation it appeared that the tsunami, which some estimate to be 7 m to 8 m high at the shoreline, may have been generated by a massive underwater slump caused by the earthquake, see Kawata et. al. (1999). Southern California is especially susceptible to such events due to the combination of offshore faults and near-shore submarine canyons with stored sediment as well as bottom material on relatively steep slopes that may fail due to earthquake shaking. The resulting waves generated by the submarine landslides may generate sizeable onshore and offshore propagating waves; the former leading to significant danger of coastal inundation with little warning time. There have been several recent investigations dealing with waves generated by underwater landslides, e.g., Watts (1997), to mention one. In that case two-dimensional experiments of submarine landslides were conducted at a small scale using both solid body motions and sediment masses investigating only offshore propagating waves. In 113 114 Synolakis and Raichlen recent work by Grilli, Watts, and Dias (2001) small-scale three-dimensional underwater bodies of irregular shapes moving by gravity were used to confirm a numerical model. In both cases the experiments were directed to waves in the generation region and offshore and not the local run-up associated with such waves. As mentioned, it is the latter, i.e., local the run-up associated with nearshore landslides which move offshore, which is of primary interest in these studies. 2. Presentation and Discussion of Results We have conducted “small-scale” exploratory experiments in a wave tank 38 cm wide with a plane beach sloped 1 vertical to 2.08 horizontal constructed of precision aluminum plate representing the near-shore region. These experiments used a triangular shaped lead block to represent a landslide. The dimensions of the triangular cross section were: a horizontal length b = 18 cm, a vertical front-face height a = 9 cm, and a width (thickness) w = 5 cm. A teflon membrane affixed to the base in contact with the slope reduced the effects of friction between the wedge and the bottom. The horizontal surface of the wedge was initially positioned either a small distance above or below the still water level to represent a subaerial or a submarine landslide. The block was released from rest, abruptly moving down-slope under the effect of gravity. Water surface-time histories were obtained in front of the at-rest position of the wedge and to one side. In this case only offshore and nearshore laterally propagating waves were measured. (Due to the small scale of the experiments, the run-up could not be accurately measured.) An example of the waves measured a relative distance x/b = 4.26 seaward of the shoreline and on the centerline for two cases are presented in Figure 1. The abscissa is the time relative to the first maximum and the ordinate is the measured wave amplitude. The top surface of the wedge, when representing a submarine landslide, was initially 1.5 cm below the still water level (SWL); for a subaerial landslide the top surface of the wedge was 1.4 cm above the SWL. It is noted that the amplitude of the seaward generated wave is relatively small, with the first positive wave about 50% larger for the subaerial case compared to the submerged slide. If one considers the front face of the wedge as being the wave generator for the first positive offshore propagating wave due to its initial motion, the height of the vertical face of the “generator” for the subaerial landslide initially is 15% less than for the submerged case. Only considering these dimensions one would expect the wave from the subaerial landslide to be less than that from the submarine landslide which is not the case as seen in Figure 1. Therefore, the difference in the wave heights is probably related to differences in the initial wedge acceleration for the two cases. For the subaerial landslide the added hydrodynamic mass and the initial form drag (both of which oppose motion) would be smaller than for the submerged wedge. Thus, the initial acceleration for the subaerial case will be larger than for the submerged wedge. There is a need for experiments to be conducted which study the three-dimensional problem both with respect to the water surface time history in the region of generation and the time history of run-up at a large enough size to reduce scale effects. Only from such experiments can a reliable data base be realized to confirm, with confidence, Waves and Run-up Generated by a Three-Dimensional Sliding Mass 115 numerical models used to establish coastal inundation limits and to define the run-up associated with subaerial and submarine landslides. Large-scale experiments have been conducted in a wave tank at Oregon State University with a length 104 m, width 3.7 m, depth 4.6 m and with a plane slope (1:2) located near one end of the tank. Similar to the small scale experiments a wedge was used to represent the landslide. The triangular face has the following dimensions: a horizontal length of b = 91 cm, a vertical face a = 46 cm high and a width of the wedge 1.0 Data.4 Runs 5&7 Selected η Amplitude (cm) 0.5 0.0 Submarine "Landslide" (0.5) Partial Aerial "Landslide" (1.0) (1.0) (0.8) (0.6) (0.4) (0.2) 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 Time (sec) Figure 1. Water surface time histories seaward of a small sliding wedge simulating a subaerial (partial aerial) and submarine landslide. of w = 61 cm. The wedge is instrumented with a position and velocity transducer to independently determine the position and velocity time histories. The wedge travels down the slope by gravity rolling on specially designed wheels (with low friction bearings) which ride on aluminum strips with shallow grooves inset into the slope. A sufficient number of wave gages are used to determine the seaward propagating waves, the waves propagating to either side of the wedge, and for the submerged case, the water surface-time history over the wedge. In addition, the time history of the run-up on the slope is accurately measured electronically using resistance wave gages mounted parallel to the slope along with video images. For a given initial wedge position the mass of the wedge is varied to change its initial acceleration. The initial position of the wedge ranged from totally aerial to fully submerged. Two configurations of the wedge on the slope were used: (1) the front face of the wedge vertical (Series A) and (2) the wedge turned “end-for-end” so that for this orientation the top and front faces are neither horizontal nor vertical (Series B). 116 Synolakis and Raichlen Examples of the waves measured over the body are presented in Figure 2 for various positions, x/b and y/b, and submergence distances, ∆/b. The coordinate x is measured offshore from the original shoreline and y is measured laterally from the centerline of 3.0 2.0 Wave amplitude (cm) 1.0 0.0 (1.0) (2.0) ∆/b = -0.115 x/b = 0.917 y/b = 0 (3.0) ∆/b = −0.328 x/b = 0.50 y/b = 0 (4.0) (5.0) ∆/b = -0.437 x/b = 0.33 y/b = 0 (6.0) (7.0) 10.0 10.5 11.0 11.5 12.0 12.5 13.0 13.5 14.0 Time (sec) Figure 2. Water surface time histories at locations on the centerline at various offshore distances for a body mass of 475.5 kg in Series A. the tank (and the wedge). The dimension b is the length of the top face of the wedge in the offshore direction and ∆ is the submergence of the top face measured positively upward from the “highest” point on the body. The water surface time histories over the wedge on the centerline corresponding to three different initial submergences are presented in Figure 2. (The origin of time is arbitrary in Figure 2.) As expected, as the initial submergence increases the wave amplitude of the leading depression wave decreases along with that of the following positive wave. The depression forms the leading portion of an “N” wave that propagates toward shore and runs up the slope. Waves and Run-up Generated by a Three-Dimensional Sliding Mass 117 The water surface-time histories for centerline locations over the initial position of the wedge are presented in Figure 3 for Series A with the mass of the wedge equal to 475.5 kg and the initial relative submergence of the wedge: ∆/b = - 0.33. The ordinate is dimensional and corresponds to the wave amplitude and the body displacement (the latter divided by 25, for convenience) and the abscissa is time measured from an arbitrary origin. The location of each of the traces corresponding to the displacement of the water surface is shown normalized by the length of the top surface of the wedge (b = 91 cm). Also shown in Figure 3 is the displacement-time history of the wedge 3.0 x/b=0.74, y/b=0.0 x/b=1.16, y/b=0.0 Amplitude (cm), Displacement/25 (cm) 2.0 x/b=1.58, y/b=0.0 Displacement 1.0 0.0 (1.0) (2.0) (3.0) 10.0 10.5 11.0 11.5 12.0 12.5 13.0 13.5 14.0 14.5 15.0 Time (sec) Figure 3. Water surface time histories measured over the wedge during its initial motion along with the displacement time history of the wedge (m = 475.5 kg) in Series A. after release. These water surface-time histories show that the maximum leading depression of the water surface is formed before the wedge has moved approximately one-half its length (t < 11.7 sec). The waves seen for t > 14 sec are waves propagating offshore generated by the run-down process. In Figure 4 the variation of the relative run-up (R/d) is shown as a function of a submergence-acceleration parameter for both Series A and B with the configurations described earlier. In the ordinate R represents the maximum run-up elevation relative to the still water level, i.e., the temporal maximum vertical elevation of the tongue of water propagating up the slope. The dimension d is the distance from the still water surface to the slope measured through the center of gravity of the wedge. 118 Synolakis and Raichlen 100.000 Series A Run 2-12 m = 191.0 kg Series A Run13-27 m = 273.4 kg Series A Run 28-39 m = 356.0 kg 10.000 Series A Run 40-51 m = 436.8 kg Series A Run 52-66 m = 475.5 kg Series B Run 67-75 m = 191.0 kg Series B Run 76-86 m = 273.4 kg 1.000 Series B Run 87-99 m = 356.0 kg R/d Series B Run100-114 m = 437.6 kg 0.100 0.010 0.001 (5.0) (4.0) (3.0) (2.0) (1.0) 0.0 1.0 2.0 (∆/b)(d/b)(g/udot) Figure 4. The variation of the relative run-up with the submergence-acceleration parameter in Series A and B. The abscissal parameter embodies the ratio of d to the horizontal projection of the wedge on the slope, b, the ratio of the distance from the uppermost point on the wedge to the still water surface to the wedge length ∆/b, and the ratio of the acceleration of gravity, g, to the initial acceleration of the body when it is released from rest, udot. (The data in Figure 4 are identified both with respect to body mass and to the experimental series, i.e., the orientation of the wedge.) The data are shown for submerged (-∆) and subaerial (+∆) initial wedge positions. First giving attention to the experiments corresponding to the submerged wedges (-∆) it is seen that as the submergence increases the run-up decreases, and as the d increases for a given body, ∆, the run-up decreases. On the other-hand, when the initial acceleration, udot, increases the run-up increases. For the submerged wedge, the data are reasonably well organized for a given wedge orientation, and show that the case with a vertical face directed offshore generates run-up greater than when the body is oriented “end-for-end”. This Waves and Run-up Generated by a Three-Dimensional Sliding Mass 119 change in orientation essentially “streamlines” the wedge to some extent thereby reducing its wave making ability and thus the associated run-up. These experiments involve both small and finite amplitude waves and the concomitant run-up depending on the initial wedge position and acceleration. The results using this well defined shape and a range of initial wedge locations relative to the still water level and initial accelerations (masses) provide a carefully obtained set of data on this very important tsunami problem conducted at a scale which minimizes viscous and capillary effects. This is an on-going study and these experimental data are to be compared to numerical models, e.g., Synolakis et. al. (2000), which define the run-up based on: (1) a given initial instantaneous configuration of the water surface over the slide and (2) the acceleration-time history of the wedge motion. 3. Conclusions The following major conclusions can be drawn from this study: 1. For the same body shape and mass, subaerial landslides generate larger offshore propagating waves than submerged landslides. 2. For submerged landslides the waves that propagate onshore and generate local runup decrease significantly as the initial submergence increases. 3. The onshore propagating waves develop a maximum drawdown before the wedge has moved a half-length. 4. The initial acceleration and submergence (or super elevation) are important parameters in defining onshore run-up. 4. References Grilli, S.T., Watts, P., and Dias, F.,2001. “Numerical and Experimental Modeling of Tsunamis Generated by Underwater Landslides”, European Geophysical Society, XXVI General Assembly, Nice, France. Kawata, Y., et.al., 1999. “Tsunami in Papua New Guinea Was As Intense As First Thought” Eos, Transactions, A.G.U., vol. 80, No. 9, 2. Synolakis, et.al., 2000. “Modeling of the 1994 Skagway, Alaska Tsunami”, Bulletin of the Amer. Geoph. Union, 81 (48). Watts, P., 1997. “Water Waves Generated by Underwater Landslides”, Ph.D. Thesis, California Institute of Technology.