BORANG PENGESAHAN STATUS TESIS UNIVERSITI TEKNOLOGI MALAYSIA JUDUL
advertisement

PSZ 19:16(Pind.1/97)
UNIVERSITI TEKNOLOGI MALAYSIA
BORANG PENGESAHAN STATUS TESIS ♦
JUDUL : MATHEMATICAL MODELLING OF BOUNDARY LAYER FLOW
AND HEAT TRANSFER IN FORCED CONVECTION
SESI PENGAJIAN :
Saya
2005/2006
RAJA MOHD TAUFIKA BIN RAJA ISMAIL
(HURUF BESAR)
mengaku membenarkan tesis ( PSM / Sarjana / Doktor Falsafah ) ini disimpan di Perpustakaan
Universiti Teknologi Malaysia dengan syarat-syarat kegunaan seperti berikut :
1.
2.
3.
4.
Tesis adalah hak milik Universiti Teknologi Malaysia.
Perpustakaan Universiti Teknologi Malaysia dibenarkan membuat salinan untuk tujuan pengajian
sahaja.
Perpustakaan dibenarkan membuat salinan tesis ini sebagai bahan pertukaran di antara institusi
pengajian tinggi.
** Sila tandakan (9 )
SULIT
(Mengandungi maklumat yang berdarjah keselamatan atau
kepentingan Malaysia seperti yang termaktub di dalam AKTA
RAHSIA RASMI 1972)
TERHAD
(Mengandungi maklumat TERHAD yang telah ditentukan oleh
organisasi/badan di mana penyelidikan dijalankan)
TIDAK TERHAD
9
Disahkan oleh
(TANDATANGAN PENULIS)
(TANDATANGAN PENYELIA)
Alamat Tetap : LOT 557 SG. JAN
27000 JERANTUT
PAHANG
PROF. DR. NORSARAHAIDA S. AMIN
Nama Penyelia
Tarikh
Tarikh :
:
5 Mei 2006
5 Mei 2006
CATATAN : * Potong yang tidak berkenaan.
** Jika tesis ini SULIT atau TERHAD, sila lampirkan surat daripada pihak berkuasa/organisasi
berkenaan dengan menyatakan sekali sebab dan tempoh tesis ini perlu dikelaskan sebagai
SULIT atau TERHAD.
♦
Tesis dimaksudkan sebagai tesis bagi Ijazah Doktor Falsafah dan Sarjana secara penyelidikan,
atau disertasi bagi pengajian secara kerja khusus dan penyelidikan, atau Laporan Projek Sarjana
Muda (PSM).
"I declare that I have read through this dissertation and in my opinion it has fulfilled
the requirements in terms of the scope and quality for the purpose of
awarding the Master of Science (Mathematics) degree.”
Signature
:
Supervisor’s Name
:
Prof. Dr. Norsarahaida S. Amin
Date
:
5 May 2006
MATHEMATICAL MODELLING OF BOUNDARY LAYER FLOW
AND HEAT TRANSFER IN FORCED CONVECTION
RAJA MOHD TAUFIKA RAJA ISMAIL
A dissertation submitted in partial fulfillment of the
requirements for the award of the degree of
Master of Science (Mathematics)
Faculty of Science
Universiti Teknologi Malaysia
MAY 2006
ii
I declare that this thesis entitled “Mathematical Modelling of Boundary Layer Flow
and Heat Transfer in Forced Convection” is the result of my own research except as
cited in the references. The thesis has not been accepted for any degree and is not
concurrently submitted in candidature of any other degree.
Signature :
Name
:
RAJA MOHD TAUFIKA RAJA ISMAIL
Date
:
5 May 2006
iii
To my beloved family
R. Ismail & Siti Khodijah
R. Bazlin, R.M. Firdaus
& R. Syakireen Shahida
Thanks for all the sacrifices, support and hope which is
given so far....
To all the UTM lecturers
Thanks for all knowledge....
iv
ACKNOWLEDGEMENT
I would like to extend my gratitude to many people for the successful
completion of this dissertation in due course of time. Firstly I would like to thank
my supervisor, Prof. Dr. Norsarahaida S. Amin for giving me all the necessary and
valuable guidance in conducting this dissertation. I am also indebted to PM. Dr. Ali
Hassan Mohamed Murid, Dr. Sharidan Shafie and Dr. Maslan Osman for their
constructive comments and criticisms.
Thank you to all my friends for their support. Last but not the least, I would
like to thank my family and those who are involved either directly or indirectly in
ensuring the completion of this dissertation.
v
ABSTRACT
A mathematical model for the boundary layer flow and heat transfer in forced
convection is developed. Boundary layer is a narrow region of thin layer that exists
adjacent to the surface of a solid body where the effects of viscosity are obvious,
manifested by large flow velocity and temperature gradient.
The concept of
boundary layer was first introduced by Ludwig Prandtl (1875-1953) in 1905. The
derivation of both velocity and temperature boundary layer equations for flow past a
horizontal flat plate and semi-infinite wedge are discussed.
The velocity and
temperature boundary layer equations are first transformed into ordinary differential
equations via a similarity transformation. The differential equations corresponding
to the flow past a horizontal flat plate and a semi-infinite wedge are nonlinear and
known respectively as the Blasius and the Falkner-Skan equation. The approximate
solutions of these equations are obtained analytically using a series expansion,
namely the Blasius series and an improved perturbation series using the Shanks
transformation.
The solutions presented include the velocity and temperature
profiles, the skin friction and the heat transfer coefficient.
vi
ABSTRAK
Model matematik bagi aliran lapisan sempadan dan pemindahan haba dalam
perolakan paksa telah dibina. Lapisan sempadan merupakan suatu kawasan nipis
yang wujud pada suatu permukaan, di mana kesan kelikatan terhadap aliran bendalir
adalah nyata yang mengakibatkan wujud kecerunan halaju dan suhu yang besar.
Konsep lapisan sempadan buat pertama kalinya telah diperkenalkan oleh Ludwig
Prandtl (1875-1953) pada tahun 1905. Penerbitan bagi persamaan-persamaan lapisan
sempadan halaju dan suhu bagi aliran merentasi suatu plat rata yang mendatar dan
merentasi bucu semi-infiniti telah dibincangkan.
Kedua-dua persamaan lapisan
sempadan halaju dan suhu terlebih dahulu dijelmakan kepada persamaan-persamaan
pembezaan biasa menggunakan penjelmaan keserupaan.
Persamaan pembezaan
yang diperoleh bagi kes aliran merentasi plat rata dan bucu semi-infiniti masingmasing dikenali sebagai persamaan Blasius dan persamaan Falkner-Skan.
Kemudian, persamaan Blasius diselesaikan menggunakan pengembangan siri yang
dikenali sebagai siri Blasius dan persamaan Falkner-Skan diselesaikan menggunakan
kaedah usikan yang dipertingkatkan dengan penjelmaan Shanks. Keputusan yang
diperoleh adalah merangkumi profil halaju dan suhu, tegasan ricih dan pekali
pengaliran haba.
vii
TABLE OF CONTENTS
CHAPTER
1
2
TITLE
PAGE
TITLE PAGE
i
DECLARATION PAGE
ii
DEDICATION PAGE
iii
ACKNOWLEDGEMENT
iv
ABSTRACT
v
ABSTRAK
vi
TABLE OF CONTENTS
vii
LIST OF TABLES
x
LIST OF FIGURES
xi
LIST OF SYMBOLS
xiii
INTRODUCTION
1
1.1
Introduction
1
1.2
Objective and Scope of Research
2
1.3
Historical Background
3
1.4
Introduction to Chapters
4
DERIVATION OF THE VELOCITY
BOUNDARY LAYER EQUATIONS
6
2.1
Introduction
6
2.2
The Boundary Layer Approximation
6
2.3
The Physical Model of Boundary Layer
8
2.4
Derivation of Boundary Layer Equations
10
viii
2.5
3
Order of Boundary Layer Thickness and the
Reynolds Number
14
2.6
Nondimensional Boundary Layer Equations
15
2.7
The Boundary Conditions
18
DERIVATION OF THE THERMAL
BOUNDARY LAYER EQUATION
19
3.1
Introduction
19
3.2
Basic Principles of Convection Heat Transfer
19
3.3
Derivation of the Temperature Boundary
Layer Equation
3.4
Temperature Boundary Layer Thickness and
Prandtl Number
28
3.5
Heat Transfer Coefficient and Nusselt Number
29
3.6
The Relation between Fluid Friction and Heat
Transfer
4
22
30
VELOCITY BOUNDARY LAYER PAST A
HORIZONTAL FLAT PLATE AND A
SEMI-INFINITE WEDGE
32
4.1
Introduction
32
4.2
Physical Models of Boundary Layer Flow
33
4.3
Nondimensionalization of Variables
34
4.4
Similarity Transformation
36
4.5
Solution of the Boundary Layer Equations
Past a Horizontal Flat Plate
40
4.5.1
Similarity Transformation
41
4.5.2
Solution of Blasius Equation via
4.5.3
4.6
Blasius Series
44
Result and Analysis
48
Solution of the Boundary Layer Equations
Past a Semi-infinite Wedge
56
4.6.1
56
Similarity Transformation
ix
4.6.2
4.6.3
5
Solution of Falkner-Skan Equation via
Perturbation Method
59
Result and Analysis
64
TEMPERATURE BOUNDARY LAYER PAST A
HORIZONTAL FLAT PLATE AND A
SEMI-INFINITE WEDGE
71
5.1
Introduction
71
5.2
Physical Model of Temperature Boundary
Layer
72
5.3
Nondimensionalization of Variables
73
5.4
Solutions of the Temperature Boundary Layer
Equation for Flow Past a Horizontal Flat Plate
75
5.4.1
Similarity Transformation
75
5.4.2
Solution of the Transformed
5.4.3
5.5
76
Result and Analysis
78
Solutions of the Temperature Boundary Layer
Equation for Flow Past a Semi-infinite Wedge
83
5.5.1
Similarity Transformation
83
5.5.2
Solution of the Transformed Thermal
5.5.3
6
Temperature Boundary Layer Equation
Boundary Layer Equation
85
Result and Analysis
85
CONCLUSION
92
6.1
Summary of Research
92
6.2
Suggestion for Future Research
94
REFERENCES
APPENDICES A - E
95
99-120
x
LIST OF TABLES
TABLE NO.
4.1
TITLE
Solution of the Blasius equation (4.14), i.e., when
gg ′ = 1 / 2 using the Blasius series
4.2
51
Solution of the Blasius equation (4.16), i.e., when
gg ′ = 1 using the Blasius series
4.3
PAGE
52
Iterated application of Shanks transformation to
the series (4.35), as β = 1
63
4.4
Comparison of values of f ′′(0; β )
64
4.5
The numerical solution of Falkner-Skan equation
for various values of β
5.1
65
Values of − θ ′(0) for constant wall temperature
and θ (0) for constant wall heat flux, for several
values of Pr
5.2
Iterated application of Shanks transformation to
the series (5.23), as β = 1
5.3
90
Values of − θ ′(0; β ) for constant wall temperature
case for several values of β (or m) and Pr
5.4
81
90
Value of θ (0; β ) for constant wall heat flux case
for several values of β (or m) and Pr
91
xi
LIST OF FIGURES
FIGURE NO.
2.1
TITLE
Physical model for the boundary layer over a
slender body
2.2
PAGE
9
A sketch of the different boundary layer flow
regimes on a flat plate
9
3.1
Convection heat transfer from a plate
21
3.2
Elemental volume for energy analysis of laminar
boundary layer
4.1
Physical configuration for flow past a horizontal
flat plate
4.2
24
33
Physical configuration for flow past a semi-infinite
wedge
34
4.3
Mathematica programming for finding A2
47
4.4
Domb-Sykes plot of the Blasius series (4.22)
49
4.5
The velocity profiles of Blasius equation (4.14),
i.e., when gg ′ = 1 / 2
4.6
51
The sketch of f(η) of Blasius equation (4.14), i.e.,
when gg ′ = 1 / 2 to be approximated as a linear
function as η → ∞
4.7
Falkner-Skan velocity profiles for several values
of β
4.8
4.9
52
66
Streamlines and velocity profiles near a separation
point S past an arbitrary wall
67
Flow in the neighborhood of the stagnation point
69
xii
5.1
Comparison between velocity and thermal boundary
layers on an arbitrary wall
5.2(a)
Profiles of θ (η) for several values of Pr for case of
constant wall temperature
5.2(b)
88
Profiles of θ (η) when β = 1 for several values of
Pr for case of constant wall temperature
5.4(b)
88
Profiles of θ (η) when β = 0.5 for several values of
Pr for case of constant wall heat flux
5.4(a)
79
Profiles of θ (η) when β = 0.5 for several values of
Pr for case of constant wall temperature
5.3(b)
79
Profiles of θ (η) for several values of Pr for case of
constant wall heat flux
5.3(a)
72
89
Profiles of θ (η) when β = 1 for several values of
Pr for case of constant wall heat flux
89
xiii
LIST OF SYMBOLS
Cf
-
Friction coefficient
Cfx
-
Local friction coefficient
Ec
-
Eckert number
h
-
Heat transfer coefficient
hx
-
Local heat transfer coefficient
i, j
-
Unit vector in Cartesian system
k
-
Thermal conductivity
L
-
Length
Nu
-
Nusselt number
Nux
-
Local Nusselt number
p
-
Pressure
Pr
-
Prandtl number
q
-
Heat transfer rate
q'''
-
Heat flux
Re
-
Reynolds number
Rex
-
Local Reynolds number
T
-
Temperature
Tw
-
Wall temperature
T∞
-
Free stream temperature
u
-
Component-x of velocity
u
-
Velocity vector
U(x)
-
Free stream velocity function
U∞
-
Free stream velocity
v
-
Component-y of velocity
x, y, z -
Space coordinate in Cartesian system
α
-
Thermal diffusivity
β
-
Coefficient of thermal expansion
xiv
β
-
Parameter of Falkner-Skan equation
δ
-
Velocity boundary layer thickness
δT
-
Temperature boundary layer thickness
η
-
Similarity variable
θ
-
Temperature difference
µ
-
Dynamic viscosity
ρ
-
Density
τw
-
Wall shear stress
υ
-
Kinematics viscosity
Φv
-
Dissipation function
ψ
-
Stream function
xv
LIST OF APPENDICES
APPENDIX
A
B
C
D
E
TITLE
PAGE
C++ Programming for Calculating the Solution of
the Blasius Equation from the Blasius Series
100
Mathematica Programming for Solving the
Falkner-Skan Equation via Perturbation Series and
Shanks Transformation
102
Mathematica Programming for Solving the
Temperature Boundary Layer Equation of Blasius
Problem (Flat Plate)
109
Mathematica Programming for Solving the
Temperature Boundary Layer Equation of FalknerSkan Problem (Semi-infinite Wedge)
113
Table of the Error Function
120
CHAPTER 1
INTRODUCTION
1.1
Introduction
Boundary layer is a narrow region of thin layer that exists adjacent to the
surface of a solid body when a real fluid flows past the body. In this region, the
effect of viscosity is obvious on the flow of the fluid which resulted in large velocity
gradient and the presence of shear stress. The various transfer processes which take
place in fluids and between solids and fluids are momentum, mass, and heat transfer.
When formulating the conservation laws of mass, momentum, and energy, the laws
of thermodynamics and gas dynamics have to be observed. This means that along
with the boundary layer flow, there are also the thermal boundary layer and the
mutual influence of these boundary layers upon one another to be accounted for.
The concept of boundary layer plays an important role in many branches of
engineering sciences, especially in hydrodynamics, aerodynamics, automobile and
marine engineering (Kundu and Cohen, 2004).
This report contains the derivation of both velocity and thermal boundary
layer equations. Both velocity and temperature boundary layer are modelled in view
of flow past a horizontal flat plate and semi-infinite wedge cases. In each cases of
2
flow, the velocity and the thermal boundary layer equations are transformed to a
single nonlinear and a linear differential equation respectively via similarity
transformation. The nonlinear equations are known as the Blasius equation and the
Falkner-Skan equation; each corresponds to the cases of flow past a horizontal flat
plate and semi-infinite wedge respectively. Then the Blasius equation is solved via
series expansion namely the Blasius series while the Falkner-Skan equation is solved
using perturbation method, i.e. perturbation series together with Shanks
transformation.
From the solution of velocity and temperature boundary layer
equations, the analysis of results is made in consideration of the skin friction and
heat transfer coefficient.
In this chapter, the objective, methodology and scope of this project are
described. The historical background of the boundary layer is also included here.
1.2
Objectives and Scope of Research
The objectives of this research are:
1.
To derive the velocity and temperature boundary layer equations in forced
convection.
2.
To find the solution of the velocity and temperature boundary layer equations
past a horizontal flat plate and a semi-infinite wedge via similarity
transformation.
3.
To solve the Blasius equation using series expansion.
4.
To solve the Falkner-Skan equation using the perturbation series which is
improved further using Shanks transformation.
3
The scope of this project is to derive the existing models of velocity and
thermal boundary layers in a more comprehensive manner. No new mathematical
models will be developed. The immersed bodies considered are the horizontal flat
plate and the semi-infinite wedge.
1.3
Historical Background
Until the beginning of the twentieth century, analytical solution of a steady
fluid flows were generally known for two typical situations. One of these was that of
parallel viscous flows and low Reynolds number flows, in which the nonlinear
advective terms were zero and the balance of forces was that between the pressure
and the viscous forces. The second type of solution was that of inviscid flows
around bodies of various shapes, in which the balance of forces was that between the
inertia and pressure forces. Although the equations of motion are nonlinear in this
case, the velocity field can be determined by solving the linear Laplace equation.
These irrotational solutions predicted pressure forces on a streamlined body that
agreed surprisingly well with experimental data for flow of fluids of small viscosity.
However these solutions also predicted a zero drag force and a nonzero tangential
velocity at the surfaces, features that did not agree with experiments.
In 1905 Ludwig Prandtl, an engineer by profession and therefore motivated to
find realistic fields near bodies of various shapes, first hypothesized that, for small
viscosity, the various forces are negligible everywhere except close to the solid
boundaries where the no-slip condition had to be satisfied. The thickness of these
boundary layers approaches zero as the viscosity goes to zero. The hypothesis of
Prandtl reconciled two rather contradicting facts. On one hand he supported our
intuitive idea that the effects of viscosity are indeed negligible in most of the flow
field if the kinematics viscosity is small. At the same time Prandtl was able to
account for drag by insisting that the no-slip condition must be satisfied at the wall,
4
no matter how small the viscosity is. Prandtl also showed how the equations of
motion within the boundary layer can be simplified. Since the time of Prandtl, the
concept of the boundary layer has been generalized, and the mathematical techniques
involved have been formalized, extended, and applied to various other branches of
physical science. The concept of boundary layer is considered one of the
cornerstones in the history of fluid mechanics. Besides, just as the hydrodynamic
boundary layer was defined as that region of the flow where viscous forces are felt, a
thermal boundary layer may be defined as that region where temperature gradients
would result from a heat exchange process between the fluid and the wall (Kundu
and Cohen, 2004).
1.4
Introduction to Chapters
This report contains six chapters. In Chapter 2, we clarify the derivation of
the velocity boundary layer equations, which is actually represented via
approximation. This chapter starts with the visualization of the physical model of
boundary layer flow. It follows with the derivation of the velocity boundary layer
equations, which is the main objective in this chapter. Then the order of boundary
layer thickness and the Reynolds Number will be discussed. The derivation of the
dimensionless boundary layer equations and the selection of boundary conditions
will also be discussed in this chapter.
The main objective in Chapter 3 is to derive the temperature boundary layer
equation.
This chapter contains an explanation of some basic principles of
convection heat transfer. It follows with the derivation of the temperature boundary
layer equation. Next, the concept of thermal boundary layer thickness and the
Prandtl number, and the heat transfer coefficient and the Nusselt number will be
discussed. This chapter ends with the description of the relation between fluid
friction and heat transfer.
5
The next two chapters describe the models of velocity and thermal boundary
layers past immersed bodies, namely the horizontal flat plate and semi-infinite
wedge. Chapter 4 first illustrates the physical models of boundary layer flow past
the bodies. Then the nondimensionalization of the boundary layer equations which
have been obtained in Chapter 2 will be shown.
Next, the equations will be
transformed via similarity transformation for each case of flow. The transformation
will result in an ordinary differential equation, namely the Blasius equation for flow
past a horizontal flat plate. After that the solution of Blasius equation using series
expansion will be described. On the other hand, the similarity transformation will
result in the Falkner-Skan equation for flow past a semi-infinite wedge.
The
Falkner-Skan equation will be solved via perturbation method. Finally the result
which provides the velocity profiles and the skin friction coefficient will be analyzed
for each case of flow in this chapter.
Chapter 5 will explain the models of thermal boundary layer. In this chapter
we will apply the thermal boundary layer equation obtained in Chapter 3 to the
problem of steady laminar flow past a horizontal flat plate and a semi-infinite wedge.
This chapter first describes the physical models of thermal boundary layer past the
bodies, and then the derivation of dimensionless thermal boundary layer equation
follows. Then the thermal boundary layer equation will be transformed to another
equation using similarity transformation technique.
Next, the solution of the
transformed equations will be obtained. This chapter ends with the analysis of
results which provides the temperature profiles and the heat transfer coefficient.
Finally, the conclusion of this project will be included in Chapter 6. This
chapter also contains some suggestions for future studies.
CHAPTER 2
DERIVATION OF THE VELOCITY BOUNDARY LAYER EQUATIONS
2.1
Introduction
The primary objective of this chapter is to derive the velocity boundary layer
equations. Section 2.2 describes the boundary layer equations from the NavierStokes equations, which is actually represented via approximation.
Section 2.3
contains the illustration of the physical model of the boundary layer for flow past an
immersed body. The derivation of the boundary layer equations then follows in
Section 2.4. Section 2.5 explains about the order of the boundary layer thickness and
the Reynolds Number. The dimensionless boundary layer equations will be derived
in Section 2.6 and Section 2.7 contains the description of the boundary conditions.
2.2
The Boundary Layer Approximation
Flow past a body found under the assumption of zero viscosity can be served
as an approximate solution to viscous flow for large values of the Reynolds number
7
(denoted as Re). However, this solution is not uniformly valid in the entire field
because it breaks down completely near a solid wall to which a real fluid adheres,
while the theory of potential flow in general yields a nonzero tangential velocity.
The potential flow solution represents an approximate solution to the Navier-Stokes
equations for large Reynolds numbers, with an error of O(Re − α ) (with α yet to be
determined).
The breakdown of the solution directly at the wall nevertheless
remains, no matter how large the Reynolds number is.
Therefore, the complete approximate solution to the Navier-Stokes equation
for Re >> 1 must be built up from two parts of solution valid in different regions:
1. Outer region, where variations of velocity are characterized by the length
scale L of the body and potential flow theory provides a valid first
approximation in an asymptotic expansion of the solution for Re → ∞
(potential flow solution).
2. Inner region, a boundary layer of thickness O( L Re − α ) near the body surface,
where viscous effects must be included even in the limit Re → ∞ .
The inner solution describes the boundary layer flow. Therefore it must be
the flow which has velocity from zero value at the wall passes asymptotically into
the velocity predicted by the solution in the outer region. Because of this nonuniformity, the approximate solution of the Navier-Stokes equations represents an
example of a singular perturbation problem, as they often appear in applications.
The outer potential flow solution for large Reynolds numbers gives important
information about, for example, the pressure and velocity distribution, but is not able
to predict the drag and makes no statements about where the boundary layer
separates, or even if it does so at all. The answer to these questions is obviously
important, and requires the solution of the inner problem, which is the subject of
boundary layer theory.
The differential equations required for the inner solution can be found
systematically from the Navier-Stokes equations within the framework of singular
8
perturbation theory. However, here we proceed along a more intuitive path. In what
follows we shall assume that the outer solution is known and so the pressure and
velocity distributions are at hand from this solution.
2.3
The Physical Model of Boundary Layer
Consider an incompressible and plane two-dimensional flow. Introduce the
so-called boundary layer coordinate system, in which x is measured along the surface
of the body and y perpendicular to it as shown in Figure 2.1. If the boundary layer
thickness δ is very small compared to the radius of curvature R of the wall contour
(δ / R << 1) , the Navier-Stokes equations hold in the same form as in Cartesian
coordinates. In the calculation of the inner solution, i.e. of the boundary layer flow,
the curvature of the wall then plays no role. The boundary layer develops as if the
wall were flat.
The wall curvature only manifests itself indirectly through the
pressure distribution given by the outer solution. The classical practice, of using the
basic principles of fluid flow and heat transfer in order to produce order-ofmagnitude estimates for the quantities of interest, is sometimes referred to as scaling
or scales analysis (Bejan, 1984).
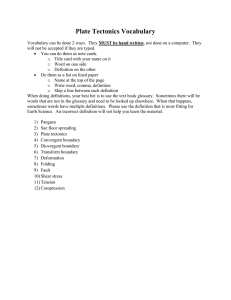
According to Kundu (1990), the simplification of the equations of motion
within the boundary layer is possible because of the layer’s thinness. Across these
layers, whish exist only in high Reynolds number flows, the velocity varies rapidly
enough for the viscous forces to be important. This is shown in Figure 2.2 where the
boundary layer thickness is greatly exaggerated. Thin viscous layers exist not only
next to solid walls but also in the form of jets, wakes, and shear layers if the
Reynolds number is sufficiently high. To be specific, we shall consider the case of a
boundary layer next to a wall, adopting a curvilinear “boundary layer coordinate
system” in which x is taken along the surface and y is taken normal to it. We shall
refer to the solution of the irrotational flow outside the boundary layer as the “outer”
problem and that of the boundary layer flow as the “inner” problem.
9
T∞
U (x)
δ (x)
y
δT (x)
Tw (x)
Flow
U∞
Figure 2.1
Physical model for the boundary layer flow over a slender body
Laminar
region
Transition
Turbulent
U∞
U∞
u
Laminar
sublayer
u
Figure 2.2
A sketch of the different boundary layer flow regimes on a flat plate
(Holman, 1990)
10
2.4
Derivation of Boundary Layer Equations
The steady Navier-Stokes and the continuity equations are
(u ⋅∇ )u = −
1
ρ
∇ p + υ∇ 2 u
∇⋅u = 0
where u ( x, y ) = u(x,y) i + v(x,y) j is the velocity vector, p(x,y) is the pressure, ρ is
the fluid density and υ is the kinematics viscosity.
Then, the momentum and continuity equations in steady state are
u
⎛ ∂ 2u ∂ 2u ⎞
1 ∂p
∂u
∂u
+v
=−
+ υ ⎜⎜ 2 + 2 ⎟⎟
ρ ∂x
∂x
∂y
∂y ⎠
⎝ ∂x
(2.1)
u
⎛ ∂ 2v ∂ 2v ⎞
1 ∂p
∂v
∂v
+v
=−
+ υ ⎜⎜ 2 + 2 ⎟⎟
ρ ∂y
∂x
∂y
∂y ⎠
⎝ ∂x
(2.2)
∂u ∂v
+
= 0.
∂x ∂y
(2.3)
A formal simplification of the equations of motion within the boundary layer
can now be performed. Let the characteristic magnitude of u in the flow field be
U ∞ , which can be identified with the upstream velocity at the large distances from
the body. Let L be the streamwise distance over which u changes appreciably. The
longitudinal length of the body can serve as L, because u within the boundary layer
does change by a large fraction of U ∞ in a distance L (Figure 2.1) and let δ denotes a
typical value of the thickness of the boundary layer, then we can write
u ~ U∞
x~L
y ~δ
11
where the symbol ~ denotes “is characterized with”.
The basic idea is that variations across the boundary layer are much faster
than variations along the layer. In other words, u and v vary much more rapidly with
y, the coordinate normal to the boundary, than they do with x, the coordinate
tangential to the boundary, i.e.
∂u
∂u
<<
∂x
∂y
This amounts, by making an order of magnitude estimate of each term, that is
U ∞ / L << U ∞ / δ provides
δ
L
<< 1 .
(2.4)
Rewriting the continuity equation (2.3) as
∂v
∂u
=− ,
∂y
∂x
it follows that
v
δ
~
U∞
L
or v ~ U ∞ δ / L in the boundary layer. This implies v << u since δ / L << 1 and U ∞
is the characterize value of u. Further, we rewrite the equations (2.1) and (2.2) as
expressions for ∂p / ∂x and ∂p / ∂y respectively, i.e.
⎛ ∂ 2u ∂ 2u ⎞
⎛ ∂u
∂p
∂u ⎞
= − ρ ⎜⎜ u
+ v ⎟⎟ + µ ⎜⎜ 2 + 2 ⎟⎟
∂x
∂y ⎠
∂y ⎠
⎝ ∂x
⎝ ∂x
⎛ ∂ 2v ∂ 2v ⎞
⎛ ∂v
∂p
∂v ⎞
= − ρ ⎜⎜ u + v ⎟⎟ + µ ⎜⎜ 2 + 2 ⎟⎟
∂y
∂y ⎠
∂y ⎠
⎝ ∂x
⎝ ∂x
12
where µ = ρυ is the dynamic viscosity. Since v << u , it then follows that
∂p
∂p
<<
,
∂y
∂x
which means that in the boundary layer, p is to a first approximation, as a function of
x alone. Then, the equations of (2.1) and (2.2) can be represented with just the
equation of longitudinal component velocity only, i.e.
⎛ ∂ 2u ∂ 2u ⎞
1 dp
∂u
∂u
u
+v
=−
+ υ ⎜⎜ 2 + 2 ⎟⎟ .
ρ dx
∂x
∂y
∂y ⎠
⎝ ∂x
(2.5)
This justifies the use of dp / dx , rather than ∂p / ∂x , in equation (2.5), and
bears out Prandtl’s remark that “the pressure distribution of the free fluid will be
impressed on the transition layer”. But the most dramatic simplification of equation
(2.5) arises on account of the following estimates:
∂ 2u U ∞
~ 2
∂x 2
L
,
∂ 2u U ∞
~
.
∂y 2 δ 2
In view of (2.4), the term ∂ 2 u / ∂x 2 is negligible compared with the term
∂ 2 u / ∂y 2 , and with this major simplification, we finally obtain the simplified
momentum equation alongside the continuity equation:
u
1 dp
∂ 2u
∂u
∂u
=−
+υ 2
+v
ρ dx
∂y
∂x
∂x
(2.6a)
∂u ∂v
+
=0
∂x ∂y
(2.6b)
which are known as the boundary layer equations (Acheson, 1992; Kundu, 1990).
13
The Pressure Gradient
Since the term ∂p / ∂y is negligible compared with the term ∂p / ∂x , we can
say that the pressure is approximately constant across the boundary layer. The
pressure at the surface is therefore equal to the pressure at the edge of the boundary
layer, and so it can be found from a solution of the irrotational flow around the body.
We say that the pressure is “imposed” on the boundary layer by the outer flow. The
pressure gradient at the edge of the boundary layer can be found from the inviscid
Euler equation
−
dU
1 dp
=U
ρ dx
dx
(2.7)
or from its integral, i.e. p + ρU 2 / 2 = constant, which is the Bernoulli equation.
Hence, the boundary layer equation (2.6) can also be written as
dU
∂ 2u
∂u
∂u
u
=U
+υ 2
+v
dx
∂y
∂x
∂x
∂u ∂v
+
= 0.
∂x ∂y
(2.8a)
(2.8b)
Here U(x) is the velocity at the edge of the boundary layer (Figure 2.1).
However, instead of finding dp / dx at the edge of the boundary layer, as a first
approximation we can apply (2.8) along the surface of the body, neglecting the
existence of the boundary layer in the solution of the outer problem; the error goes to
zero as the boundary layer becomes increasingly thin. In any event, the dp / dx term
in (2.7) is to be regarded as known from an analysis of the outer problem, which
must be solved before the boundary layer flow can be solved.
14
2.5
Order of Boundary Layer Thickness and the Reynolds Number
The other key idea involved in boundary layer theory is that the rapid
variation of u with y should be just sufficient to prevent the viscous term from being
negligible, notwithstanding the small coefficient of viscosity υ . We may at once use
this consideration to obtain an order of magnitude estimate of the boundary layer
thickness δ which varies with x. A measure of δ can be obtained by considering the
order of magnitude of the various terms in the equations of motion.
A measure of ∂u / ∂x is therefore U ∞ / L , so that a measure of the second
advective (or inertial) term in (2.1) is
∂u U ∞2
u
~
.
∂x
L
We shall see shortly that the other advective term in (2.1) is of the same order. A
measure of the viscous term in (2.1) is
υ
U
∂ 2u
~ υ ∞2 .
2
∂y
δ
While the viscous forces are completely ignored in the outer flow, they do
play a role in the boundary layer. The order of magnitude of the boundary layer
thickness can be determined by considering the thickness of the layer where the
viscous forces are of the same order of magnitude as the inertial forces. Equating
U ∞2 / L and υ U ∞ / δ 2 , we get
υ
δ
~
= Re −1 / 2
L
U∞L
where Re = U ∞ L / υ is the Reynolds number.
(2.9)
15
We now determine a measure of the typical variation of v within the
boundary layer. As mentioned earlier, from the continuity equation, v is in order of
δU ∞ / L , or in terms of Reynolds number
v ~ U ∞ Re −1 / 2 .
Next we estimate the magnitude of pressure within the boundary layer.
Experimental data on high Reynolds number flows show that the pressure
distribution is nearly that in an irrotational flow around the body, implying that the
pressure forces are of the order of the inertia forces.
The requirement
∂p / ∂x ~ ρu (∂u / ∂x) of (2.1) shows that the pressure variations within the flow field
are of order
p ~ ρU ∞2 .
2.6
Dimensionless Boundary Layer Equations
The basic hypothesis of δ << L is evidently correct if the Reynolds number
is large, i.e. the whole procedure is then self-consistent, and may indeed be put on a
more formal basis. To discuss this further, we introduce the proper nondimensional
quantities, chosen so that they are all of the same order of magnitude:
xˆ =
x
L
yˆ =
y
δ
tˆ =
U∞
t
L
(2.10)
û =
u
U∞
vˆ =
v
U ∞δ / L
pˆ =
p
ρ U ∞2
16
The important point to notice is that the distances across the boundary layer
has been magnified or “stretched” by defining yˆ = y / δ .
Substituting the nondimensional variables (2.10) into the governing equations
(2.1), (2.2) and (2.3), we get the following set of equations:
⎛ U ∂ 2 uˆ U ∂ 2 uˆ ⎞
U 2 ∂pˆ
U ∞2 ∂uˆ U ∞2 δ / L ∂uˆ
⎟
+
=− ∞
+ υ ⎜⎜ 2∞ 2 + ∞2
uˆ
vˆ
∂yˆ
δ
L ∂xˆ
L ∂xˆ
δ ∂yˆ 2 ⎟⎠
⎝ L ∂xˆ
⎛ U δ / L ∂ 2 vˆ U ∞δ / L ∂ 2 vˆ ⎞
U 2 ∂pˆ
U ∞2 δ / L ∂vˆ (U ∞δ / L) 2 ∂vˆ
⎟
=− ∞
+ υ ⎜⎜ ∞ 2
+
uˆ +
vˆ
∂xˆ
∂yˆ
L
δ
δ ∂yˆ
∂xˆ 2
δ 2 ∂yˆ 2 ⎟⎠
⎝ L
U ∞ ∂uˆ U ∞δ / L ∂vˆ
+
=0
∂yˆ
L ∂xˆ
δ
or
∂uˆ
∂uˆ
∂pˆ
υ ∂ 2 uˆ
υL ∂ 2 uˆ
+ vˆ
=− +
+
uˆ
∂xˆ
∂yˆ
∂xˆ U ∞ L ∂xˆ 2 U ∞ δ 2 ∂yˆ 2
⎛δ ⎞
⎜ ⎟
⎝L⎠
2
2
⎛ ∂vˆ
∂pˆ
∂vˆ ⎞
υ ⎛ δ ⎞ ∂ 2 vˆ
υ ∂ 2 vˆ
⎜⎜ uˆ + vˆ ⎟⎟ = − +
+
⎜ ⎟
∂yˆ U ∞ L ⎝ L ⎠ ∂xˆ 2 U ∞ L ∂yˆ 2
∂yˆ ⎠
⎝ ∂xˆ
∂uˆ ∂vˆ
+
= 0.
∂xˆ ∂yˆ
Then, we set the Reynolds number Re = U ∞ L / υ , and the coefficient of the term
∂ 2 uˆ / ∂yˆ 2 is equal to one, i.e.
υL / U ∞δ 2 = 1 . Hence, the set of the governing
equations can be written as
uˆ
∂uˆ
∂uˆ
∂pˆ
1 ∂ 2 uˆ ∂ 2 uˆ
+ vˆ
=− +
+
∂xˆ
∂yˆ
∂xˆ Re ∂xˆ 2 ∂yˆ 2
(2.11a)
17
∂vˆ ⎞
∂pˆ
1 ⎛ ∂vˆ
1 ∂ 2 vˆ 1 ∂ 2 vˆ
⎜⎜ uˆ + vˆ ⎟⎟ = − + 2 2 +
∂yˆ ⎠
∂yˆ Re ∂xˆ
Re ⎝ ∂xˆ
Re ∂yˆ 2
∂uˆ ∂vˆ
+
= 0.
∂xˆ ∂yˆ
(2.11b)
(2.11c)
In these equations, each of the non-dimensional variables and their derivatives is of
order one. For example, ∂uˆ / ∂yˆ ~ 1 in (2.11a), essentially because the changes in û
and ŷ within the boundary layer are each of order one, a consequence of our
normalization (2.10). It follows that the size of each term in the set (2.11a) and
(2.11b) is determined by the presence of a multiplicating factor involving the
parameter Re. In particular, each term in (2.11a) is of order one except the second
term on the right, whose magnitude is of order 1/Re. As Re → ∞ , these equations
asymptotically become
uˆ
∂uˆ
∂uˆ
∂pˆ ∂ 2 uˆ
+ vˆ
=− + 2
∂xˆ
∂yˆ
∂xˆ ∂yˆ
0=−
∂pˆ
∂yˆ
∂uˆ ∂vˆ
+
=0
∂xˆ ∂yˆ
The exercise of going through the nondimensionalization has been valuable,
since it has shown what terms drop out under the boundary layer assumption. Of
course, in terms of dimensional quantities, the solution does change with the
Reynolds number. We read from (2.10) that u and x do not change if û and x̂ do
not change and that for fixed v̂ and ŷ , then v and y are proportional to Re −1 / 2 . In the
“physical” plane the quantities change with Re as follows: distances and velocities in
the y direction vary proportionally to Re −1 / 2 , while in the x-direction they remain
constant. Transforming back to dimensional variables, we will obtain exactly the
same boundary layer equation (2.6).
18
2.7
The Boundary Conditions
The boundary layer equations (2.8) can be subjected to various possible of
boundary conditions; based on the modelling that we may establish. In this project,
the related boundary conditions are
u ( x,0) = 0
v( x,0) = 0
u ( x, ∞ ) = U ( x )
u ( x0 , y ) = u0 ( y )
(2.12a,b,c,d)
Conditions (2.12a) and (2.12b) are the dynamic no-slip boundary condition at
the wall.
Condition (2.12c) merely means that the boundary layer must join
smoothly with the inviscid outer flow; points outside the boundary layer are
represented by y = ∞, although we mean this strictly in terms of the nondimensional
distance y / δ → ∞ . Condition (2.12d) implies that an initial velocity u0(y) at some
location x0 is required for solving the problem. This is because the presence of the
terms u(∂u/∂x) and υ(∂2u/∂y2) gives the boundary layer equations a parabolic
character, with x playing the role of a time-like variable. In such problems governed
by parabolic equations, the field at a certain time (or x in the present problem)
depends only on its “past history”. Boundary layers therefore transfer effects only in
the downstream direction. In contrast, the complete Navier-Stokes equations are of
elliptic nature.
In summary, the simplifications achieved because of the thinness of the
boundary layer are the following. First, diffusion in the x direction is negligible
compared to the diffusion in the y direction. Second, the pressure field can be found
from the irrotational flow theory, so that it is regarded as a known quantity in the
boundary layer analysis (Kundu, 1990).
CHAPTER 3
DERIVATION OF THE TEMPERATURE BOUNDARY LAYER
EQUATION
3.1
Introduction
The main objective in this chapter is to derive the thermal boundary layer
equation. Section 3.2 explains some basic principles of convection heat transfer.
Section 3.3 is the main part of the chapter which provides the derivation of the
thermal boundary layer equation. The thermal boundary layer thickness and Prandtl
number will be described in Section 3.4 whereas the heat transfer coefficient and
Nusselt number will be described in Section 3.5. Section 3.6 discusses on the
relation between the fluid friction and the heat transfer.
3.2
Basic Principles of Convection Heat Transfer
The subject of convection heat transfer requires an energy balance along with
an analysis of the fluid dynamics of the problems concerned. Relations of fluid
20
dynamics and boundary layer analysis, energy balance on the flow system and
determine the influence of the flow on the temperature gradients in the fluid.
Examine the methods of calculating convection heat transfer, or in particular to
obtain the value of convection heat transfer coefficient, h.
When a temperature gradient exists in a body, experience shown that there is
an energy transfer from the high temperature region to the low temperature region.
We say that the energy is transferred by conduction and that the heat transfer rate per
unit area is proportional to the normal temperature gradient:
q ∂T
∝
.
A ∂y
or
q = − kA
∂T
∂y
(3.1)
where q is the heat transfer rate. The negative sign of temperature gradient ∂T / ∂y
denotes the decrease of temperature in the direction of heat flow. It is well known
that a hot plate of metal will cool faster when placed in front of a fan than when
exposed to still air. We say that the heat is convected away, and we call the process
as convection heat transfer.
Consider the heated plate shown in Figure 3.1. The temperature of the plate
is Tw , and the temperature of the fluid is T∞ . The velocity of the flow will appear as
shown, being reduced to zero at the plate as a result of viscous action. Since the
velocity of the fluid layer at the wall will be zero, the heat must be transferred only
by conduction at that point. Thus we might compute the heat transfer, using equation
(3.1), with the thermal conductivity of the fluid and the fluid temperature gradient at
the wall. The temperature gradient is dependent on the rate at which the fluid carries
the heat away; a high velocity produces a large temperature gradient, and so on.
Thus the temperature gradient at the wall depends on the flow field. Nevertheless,
the physical mechanism of heat transfer at the wall is a conduction process.
21
Free stream
T∞
Flow
U∞
u
q
Tw
Figure 3.1
Convection heat transfer from a plate
To express the overall effect of convection, we use Newton’s law of cooling:
q = hA(Tw − T∞ ) .
(3.2)
Here the heat transfer rate is related to the overall temperature difference
between the wall and fluid and the surface area A. The quantity h is called the
convection heat transfer coefficient, and equation (3.2) is the defining equation.
The convection heat transfer is dependence on the viscosity of the fluid in
addition to its dependence of the thermal properties of the fluid (thermal
conductivity, specific heat, and density). This is because viscosity influences the
velocity profile and, correspondingly, the energy transfer rate in the region near the
wall.
If a heated plate were exposed to ambient room air without an external source
of motion, a movement of the air would be experienced as a result of the density
gradients near the plate. We call this natural, or free, convection as opposed to
forced convection, which is experienced in the case of the fan blowing air over a
22
plate. Boiling and condensation phenomena are also grouped under the general
subject of convection heat transfer (Holman, 1990).
3.3
Derivation of the Temperature Boundary Layer Equation
Just as the hydrodynamic boundary layer was defined as that region of the
flow where viscous forces are felt, a thermal boundary layer may be defined as that
region where temperature gradients would result from a heat exchange process
between the fluid and the wall.
In calculating the temperature distribution within the boundary layer, we start
with an equation which incorporated in the laws of conservation. Since this project
is not covered in detail on the laws of conservation, for instant, we should take one of
the governing equations (equations of continuity, momentum and enthalpy) in
Eulerian terms derived from the basic laws of conservation of mass, momentum and
energy. The temperature formulation of the equation of enthalpy (which derived
from the general governing equation of enthalpy) is
ρcp
Dp
DT
= ∇ ⋅ (k ∇T ) + q ′′′ + β T
+ Φv
Dt
Dt
(3.3)
where operator D / Dt ≡ d / dt + (u .∇ ), ρ is the fluid density, cp is the specific heat at
constant pressure, k is the thermal conductivity, β is the coefficient of thermal
expansion ( β = 1 / T for perfect gas), T is the absolute temperature of the fluid and p
is the pressure of the fluid. q is the surface energy flux or heat flux vector, q ′′′ is the
rate of internal heat generation, and Φ v is the dissipation function.
If we neglect the internal heat generation term q ′′′ , then it made the
simplifications possible within the boundary layer theory.
Since we have
23
∂u / ∂x << ∂u / ∂y and ∂ 2 u / ∂x 2 << ∂ 2 u / ∂y 2 as explained in Chapter 2, we find the
same relation for the dissipation function as for unidirectional flow
⎛ ∂u ⎞
Φ v = µ ⎜⎜ ⎟⎟
⎝ ∂y ⎠
2
and for a perfect gas, equation (3.3) becomes
⎛ ∂ 2T ∂ 2T ⎞
⎛ ∂u ⎞
DT Dp
ρ cp
−
= k ⎜⎜ 2 + 2 ⎟⎟ + µ ⎜⎜ ⎟⎟
Dt Dt
∂y ⎠
⎝ ∂y ⎠
⎝ ∂x
2
or in the steady flow
2
⎛ ∂ 2T ∂ 2T ⎞
⎛ ∂T
⎛ ∂u ⎞
∂p
∂p
∂T ⎞
⎟⎟ − u
−v
= k ⎜⎜ 2 + 2 ⎟⎟ + µ ⎜⎜ ⎟⎟ ,
ρ c p ⎜⎜ u
+v
∂x
∂y
∂y ⎠
∂y ⎠
⎝ ∂x
⎝ ∂y ⎠
⎝ ∂x
(3.4)
where the terms ∂T / ∂t and ∂p / ∂t in DT / Dt and Dp / Dt respectively are
neglected.
We assume that a temperature boundary layer covers the slender body, whose
wall surface is heated up to a temperature Tw (see Figure 3.1). In this layer, besides
convection, i.e. transport of heat by fluid motion, heat conduction also plays a role.
Across the thermal boundary layer, the temperature changes drastically from the wall
temperature Tw to the external (ambient) flow temperature T∞ . As in the case of
viscous boundary layer, we assume the thermal boundary layer to be thin such that
δT
<< 1 ,
L
(3.5)
where δT is the average thermal boundary layer thickness. Under condition (3.5), it
can readily be shown that the thermal diffusion term ∂ 2T / ∂x 2 in equation (3.4) can
be neglected, which becomes
24
⎛ ∂u ⎞
⎛ ∂T
∂p
∂p
∂ 2T
∂T ⎞
⎟⎟ − u
−v
= k 2 + µ ⎜⎜ ⎟⎟
ρ c p ⎜⎜ u
+v
∂x
∂y
∂y ⎠
∂y
⎝ ∂y ⎠
⎝ ∂x
2
(3.6)
Equation (3.6) actually can be derived using an elemental control volume
(Holman, 1990). Since we did not explain in detail the equation of enthalpy (3.3)
which is the basis of (3.6), it is worth to derived (3.6) in another approach.
Consider the elemental control volume shown in Figure (3.2).
U∞
dy
dx
⎡ ∂T ∂ ⎛ ∂T ⎞ ⎤
− kdx ⎢
+ ⎜⎜ ⎟⎟dy ⎥
⎣ ∂y ∂y ⎝ ∂y ⎠ ⎦
⎛
ρc p ⎜⎜ v +
Net viscous work
⎝
2
∂v ⎞⎛
∂T ⎞
dy ⎟⎜ T +
dy ⎟dx
∂y ⎟⎠⎜⎝
∂y ⎟⎠
⎛ ∂u ⎞
µdx⎜⎜ ⎟⎟ dy
⎝ ∂y ⎠
⎛
⎝
ρc p ⎜ u +
ρc p uTdy
∂T ⎞
∂u ⎞⎛
dx ⎟dy
dx ⎟⎜ T +
∂x ⎠
∂x ⎠⎝
dy
dx
− kdx
Figure 3.2
∂T
∂y
ρc p vTdx
Elemental volume for energy analysis of laminar boundary layer
25
Based on the element shown in Figure 3.2, the energy balance may be written
as
Energy convected in left face + Energy convected in bottom face
+ Heat conducted in bottom face + Net viscous work done on element
= Energy convected out right face + Energy convected out top face
+ Heat conducted out top face
The convective and conduction energy quantities are indicated in Figure 3.2,
and the energy term for the viscous work may be derived as follows. The viscous
work may be computed as a product of the net viscous shear force and the distance
this force moves in unit time. The viscous shear force is the product of the shear
stress and the area dx is µ (∂u / ∂y )dx and the distance through which it moves per
unit time in respect to the elemental control volume dxdy is (∂u / ∂y )dy so that the net
viscous energy delivered to the element is µ (∂u / ∂y ) 2 dxdy .
Writing the energy balance corresponding to the quantities shown in Figure
3.2, assuming unit depth in the z-direction, and neglecting second order differentials
yields
2
⎡ ∂T
⎛ ∂u ∂v ⎞⎤
∂ 2T
∂T
⎛ ∂u ⎞
ρc p ⎢u
+v
+ T ⎜⎜ + ⎟⎟⎥ dxdy = k 2 dxdy + µ ⎜ ⎟ dxdy .
∂y
∂y
⎝ ∂x ⎠
⎝ ∂x ∂y ⎠⎦
⎣ ∂x
Using the continuity relation ∂u / ∂x + ∂v / ∂y = 0 and canceling dxdy in each terms
leads to equation (3.6).
The left-hand-side of (3.6) represents the net transport of energy into the
control volume, while the right-hand-side represents the sum of the net heat
conducted out of the control volume and the net viscous work done on the element.
We can simplify equation (3.6) even further within the framework of the boundary
layer theory. Using the fact that ∂p / ∂y = 0 as obtained in the preceding chapter,
equation (3.6) can be reduced to
26
2
⎛ ∂u ⎞
⎛ ∂T
∂p
∂ 2T
∂T ⎞
⎟⎟ − u
= k 2 + µ ⎜⎜ ⎟⎟ .
ρ c p ⎜⎜ u
+v
∂x
∂y ⎠
∂y
⎝ ∂y ⎠
⎝ ∂x
(3.7)
Furthermore, the viscous work term is of importance only at high velocities
since its magnitude will be small compared with the other terms when low velocity
flow is studied. We might consider the velocity as having the order of the free
stream velocity U∞ and the y dimension of the order of δ. Thus u ~ U ∞ and y ~ δ .
So that for the dissipation function Φ v = µ (∂u / ∂y ) 2 and the work (per unit volume)
of the pressure forces u (∂p / ∂x) , we obtain the order of magnitude are
2
U ∞3
⎛U∞ ⎞
Φv ~ µ ⎜
and
⎟ =ρ
L
⎝ δ ⎠
⎛ ρU ∞2
∂p
u
~ U ∞ ⎜⎜
∂x
⎝ L
⎞
U3
⎟⎟ = ρ ∞
L
⎠
(3.8)
when the nondimensionalizations (2.10) in Chapter 2 are used. The estimation (3.8)
shows that both terms are of the same order of magnitude. We also have
ρ c pu
T − T∞
∂T
~ ρ c pU ∞ W
.
∂x
L
(3.9)
The ratio between (3.8) and (3.9) is known as Eckert number Ec:
U ∞2
Ec =
.
c p (TW − T∞ )
(3.10)
Eckert number is the kinetic energy of flow relative to boundary layer
enthalpy difference (Kreith and Bohn, 1997), which is generally very small. Hence,
we can say that the terms in (3.8), i.e. the dissipation Φ v and the work per unit
volume u (∂p / ∂x) are negligible, compare to the term in (3.9). In other words, we
can write the orders of the terms in (3.7) as
27
2
⎛ ∂u ⎞
∂p
∂T
µ ⎜⎜ ⎟⎟ ~ u
<< ρ c p u
.
∂x
∂x
⎝ ∂y ⎠
So that, after applying the above relation and dividing each term in (3.7) by
ρc p , we obtain the thermal boundary layer equation for the steady state flow is
u
∂ 2T
∂T
∂T
=α 2
+v
∂y
∂y
∂x
(3.11)
where α = k / ρc p is the thermal diffusivity, subject to the boundary conditions
T = Tw (x)
on
y = 0,
T = T∞
as
y →∞.
(3.12)
In reality, this derivation of energy equation has been a simplified one, and
several terms have been left out of the analysis because they are small in comparison
with others. In this way we arrive at the boundary layer approximation immediately,
without resorting to a cumbersome elimination process to obtain the final simplified
relation.
In order to solve (3.11) we clearly require the velocity field in the boundary
layer. The assumption of incompressibility has the consequence that the equations of
motion are decoupled from the energy equation. Therefore, we can first solve the
equations for the momentum (velocity) boundary layer and then with the velocity
distribution resulting from this solution, it can be determined the thermal boundary
layer. However, in the case of strong external heating the change in density as a
result of the change in temperature must be taken into account. Then the flow is to
be treated as a compressible flow and the decoupling mentioned above in general
does not occur. In these circumstances the temperature dependence of the material
properties usually has to be taken into account, as well. In what follows we shall
assume that the temperature differences in the boundary layer are so small that the
above effects can be ignored (Holman, 1990).
28
3.4
Temperature Boundary Layer Thickness and Prandtl Number
The method of estimating the temperature boundary layer thickness δT (see
Figure 2.1), is significantly different from the method of finding the velocity
boundary layer thickness δ . Since u at the outer edge of the thermal boundary layer
may be estimated roughly as U ∞ for δT > δ
and U ∞ (δT / δ ) for δT < δ , the
following scale for the term u (∂T / ∂x) in the equation (3.11) can be made:
T − T∞
⎧
U∞ W
⎪
L
∂T ⎪
1/ 2
~⎨
u
∂x ⎪U ⎛ δ T ⎞ TW − T∞ = U δ ⎛⎜ U ∞ ⎞⎟ TW − T∞
⎟
∞⎜
∞ T⎜
⎟
L
L
⎪⎩ ⎝ δ ⎠
⎝υ L ⎠
, δT > δ (Pr < 1)
.
, δT < δ (Pr > 1)
Also from equation (3.11), we should notice that the term u (∂T / ∂x) is in the
same order with α (∂ 2T / ∂y 2 ) which has scaling as α (Tw − T∞ ) / δ T2 . Hence the
following arguments can be made:
U∞
TW − T∞
T −T
~α W 2 ∞
L
δT
for
δT > δ ( Pr < 1 )
and
1/ 2
⎛U ⎞
U ∞ δT ⎜⎜ ∞ ⎟⎟
⎝υ L ⎠
TW − T∞
T −T
~α W 2 ∞
L
δT
for
δT < δ ( Pr > 1 ).
Thus, we find the temperature boundary layer thickness to be in the order of
1/ 2
1/ 2
1/ 2
⎧
⎛ υ ⎞ ⎛α ⎞
⎛ α ⎞
−1 / 2
⎟
⎜
⎟
⎜
⎪
Pr −1 / 2
=⎜
⎜ ⎟ = Re
⎟
⎟
⎜
δT ⎪
⎝U∞L ⎠ ⎝ υ ⎠
⎝U∞L ⎠
~⎨
1/ 2
1/ 2
1/ 3
L ⎪ 1/ 3 1/ 6 ⎛ 1 ⎞
⎛ υ ⎞ ⎛α ⎞
−1 / 2
Pr −1 / 3
⎪α υ ⎜⎜ U L ⎟⎟ = ⎜⎜ U L ⎟⎟ ⎜⎝ υ ⎟⎠ = Re
⎝ ∞ ⎠
⎝ ∞ ⎠
⎩
, Pr < 1
(3.13)
, Pr > 1
29
where
Pr =
υ
α
=
µ cp
(3.14)
k
is the Prandtl number, which is the ratio of molecular momentum to thermal
diffusivity (Kreith and Bohn, 1997). The relationships (3.13) along with the fact that
δ / L ~ Re −1 / 2 obtained in Chapter 2 indicate that
δ
δ
~ Pr1/ 2 for Pr < 1 ,
~ Pr1/ 3
δT
δT
3.5
for
Pr > 1 .
(3.15)
Heat Transfer Coefficient and the Nusselt Number
In practical applications the heat transfer from the wall is one of the most
important physical quantities.
From equation (3.1), the wall heat flux can be
expressed as
⎛ ∂T ⎞
(T − T∞ )
⎟⎟ ~ k W
qw = − k ⎜⎜
δT
⎝ ∂y ⎠ y =0
or in terms of the heat transfer coefficient
h=
qw
k
~
.
(Tw − T∞ ) δT
Hence, from (3.13) and (3.16), we have
(3.16)
30
⎧ (Tw
⎪k
qw ~ ⎨
(T
⎪k w
⎩
− T∞ ) 1 / 2 1 / 2
Re Pr
L
− T∞ ) 1 / 2 1 / 3
Re Pr
L
, Pr < 1
, Pr > 1
or in terms of the Nusselt number
Nu =
qw L
hL
=
k
k (TW − T∞ )
(3.17)
we have
Nu ~ Re1/ 2 Pr1/ 2
for
Pr < 1 , Nu ~ Re1/ 2 Pr1/ 3
for
Pr > 1
(3.18)
The Nusselt number is the most important nondimensional parameter in the
study of heat transfer.
3.6
The Relation between Fluid Friction and Heat Transfer
We have already seen that the temperature and flow fields are related. Now
we seek an expression whereby the frictional resistance may be directly related to
heat transfer.
The skin friction at the wall or wall shear stress may be calculated from the
relation
⎛ ∂u ⎞
τ w = µ ⎜⎜ ⎟⎟ ~ ρ U ∞2 Re −1 / 2 .
⎝ ∂y ⎠ y =0
(3.19)
31
The skin friction coefficient, which is the ratio of surface shear stress to free stream
kinetic energy is given as
Cf =
τw
ρU ∞2 / 2
(Holman, 1990; Kreith and Bohn, 1997).
Therefore we have the local skin friction coefficient such as
C fx ~ Re x
−1 / 2
.
(3.20)
Equation (3.18) may be rewritten in the following form:
hx
Nu x
=
~ Pr − 2 / 3 Re −x1 / 2
Re x Pr ρc pU ∞
so that
hx
Pr 2 / 3 ~ Re −x1 / 2 .
ρc p U ∞
(3.21)
Upon comparing (3.20) and (3.21), we note that the right sides are alike,
which is the result of the approximate nature of the integral boundary layer analysis.
We recognize this approximate and write
hx
Pr 2 / 3 ~ C fx .
ρc p U ∞
This is called the Reynolds-Colburn analogy, which expresses the relation
between fluid friction and heat transfer for laminar flow particularly on a flat plate
(Holman, 1990).
CHAPTER 4
VELOCITY BOUNDARY LAYER PAST A HORIZONTAL FLAT PLATE
AND A SEMI-INFINITE WEDGE
4.1
Introduction
In this chapter we will apply the velocity boundary layer equations that we
have obtained in Chapter 2 for the problems of steady laminar flow past a horizontal
flat plate and a semi-infinite wedge at high Reynolds number. Section 4.2 illustrates
the physical models of boundary layer flow past the bodies. Section 4.3 contains the
explanation of nondimensionalization of the boundary layer equations.
The
similarity transformation technique will be described in Section 4.4.
The
dimensionless boundary layer equations will be transformed to an equation using
similarity transformation. The solutions of the boundary layer equations for flow
past a horizontal flat plate and a semi-infinite wedge will be gathered in Section 4.5
and 4.6 respectively. Sections 4.5 and 4.6 also contain the results which will view on
the velocity profiles and skin friction coefficient.
33
4.2
Physical Models of Boundary Layer Flow
A schematic representation of the flow configurations past a horizontal flat
plate and a semi-infinite wedge are given in Figure 4.1 and Figure 4.2 respectively.
For both cases, the axes of the fixed Cartesian coordinates (x,y) are measured along
the surfaces and normal to it, respectively with x = 0 denoting the upstream (or
leading) edge of the plate or wedge.
In Figure 4.1, we assume that the flat plate is idealized mathematically as
having zero thickness and that the flow moves past the plate with no disturbances.
We also assume that the plate width is large and its length is finite (denoted by L).
y
U∞
u
U∞
O
δ
x
u
Boundary
layer
Solid wall
L
Figure 4.1
Physical configuration for flow past a horizontal flat plate
For the streaming flow past a semi-infinite wedge of included angle πβ , the
motion at infinity is parallel to the bisector of the wedge. The flow configuration is
as shown in Figure 4.2.
34
y
x
Flow
πβ
U(x)
Figure 4.2
Physical configuration for flow past a semi-infinite wedge
To simplify the analysis in both cases of flow, we assume that (Holman,
2002):
1. The fluid is incompressible and the flow is steady
2. There are no pressure variations in the direction perpendicular to the surface wall
(y-direction)
3. The viscosity is constant
4. Viscous shear forces in the y-direction are negligible
4.3
Nondimensionalization of Variables
In order to study both problems involving flow past a horizontal flat plate and
a semi-infinite wedge, we have to solve the boundary layer equations (2.8) subject to
boundary conditions (2.12).
Since in this chapter we will widely use the
dimensionless variables, we should denote the dimensional variables with “¯”.
Rewriting (2.8) with some adjustments in notations:
35
u
∂u
∂u
dU
∂ 2u
+v
=U
+υ 2
∂x
∂y
dx
∂y
(4.1a)
∂u ∂v
+
=0
∂x ∂y
(4.1b)
subject to
u ( y ) = U ∞ at x = 0 , all y
u = v = 0 at y = 0 , 0 ≤ x ≤ L
(4.2)
u → U ∞ as y → ∞ , 0 ≤ x ≤ L .
Then we introduce the following nondimensional variables
x=
x
L
y
L
y = Re1 / 2
(4.3)
u=
u
U∞
v = Re1 / 2
v
U∞
U ( x) =
U (x)
.
U∞
Substituting the nondimensional variables into equations (4.1) we get
u
∂u
∂u
dU ∂ 2 u
+v
=U
+
∂x
∂y
dx ∂y 2
∂u ∂v
+
=0
∂x ∂y
(4.4a)
(4.4b)
36
subject to boundary conditions
u=v=0
at
y = 0,
u =1
as
y → ∞,
u =1
at
x=0
x>0
x>0
(4.5)
where all variables are dimensionless.
Notice that in the equation (4.4a), we will face a problem to find the external
velocity function U(x) at the edge of the boundary layer for both cases of flow. In
the inviscid theory, a uniform stream approaching a flat plate at zero angle of
incidence is unaffected by the presence of the plate, so U(x) is constant. However,
such conclusion cannot be used in the case of flow past a semi-infinite wedge, which
requires us to find out the suitable U(x). For instance, U ( x) ∝ x m which was first
found by V. W. Falkner and S. W Skan in 1931 (Eckert and Drake Jr., 1987) and this
will be explained later in Section 4.6.
4.4
Similarity Transformation
Our method of search for a similarity variable rests on the dimensional
analysis. The outline of the method consists of the following two steps (Arpaci and
Larsen, 1984; Incropera and DeWitt, 1985):
1. Make dependent variables dimensionless in terms of the inherent
characteristic properties or, in the absence of any characteristic property,
in terms of arbitrarily selected reference quantities.
37
2. Eliminate all arbitrarily selected reference quantities by successively
employing the mathematical principle (which states the invariance of the
number of dependent and independent variables of a mathematical
expression under any transformation) and the physical principle (which
states the dimensional homogeneity of a physical expression).
Then, a similarity variable may be found whenever a characteristic property
does not inherently exist which would make an independent variable dimensionless.
Once the similarity variable has been found, the governing equations and
their boundary conditions are transformed in the terms of this variable.
The
transformation is successful if the similarity variable remains as the only independent
variable. Since the transformation reduces the number of independent variables by
one, two of the original boundary conditions must reduce to one.
Now, we have the dimensionless boundary layer equations (4.4). However,
we cannot see obviously the significance of our similarity variable selection if we
work out in the dimensionless form. Thus, to explain the followings, we should start
with the nondimensional boundary layer equations (4.1).
Rewriting the
nondimensional variables (4.3) in a more general form:
x=
u=
u
U∞
x
x0
y=
v=
v
V0
y
y0
U ( x) =
U (x)
,
U∞
then the equations (4.1) may be rearranged as
⎛ U ∞ y 02
⎜
⎜ υx
0
⎝
⎞⎛ u
⎟⎜⎜
⎟ U
⎠⎝ ∞
⎞ ∂ (u / U ∞ ) ⎛ V0 y 0
⎟⎟
+⎜
⎠ ∂ ( x / x0 ) ⎝ υ
⎛ U ∞ y0
⎜⎜
⎝ V0 x 0
⎞⎛ v
⎟⎜⎜
⎠⎝ V0
⎞ ∂ (u / U ∞ ) ⎛ U ∞ y 02
⎟⎟
= ⎜⎜
⎠ ∂ ( y / y 0 ) ⎝ υx 0
⎞ ∂ (u / U ∞ ) ∂ (v / V0 )
⎟⎟
+
=0
⎠ ∂ ( x / x0 ) ∂ ( y / y 0 )
⎞⎛ U
⎟⎜
⎟⎜ U
⎠⎝ ∞
⎞ d (U / U ∞ ) ∂ 2 (u / U ∞ )
⎟
⎟ d ( x / x ) + ∂( y / y ) 2
0
0
⎠
38
which imply that
⎛ x y V y U y U y2 U ⎞
u
⎟
= f 1 ⎜⎜ , , 0 0 , ∞ 0 , ∞ 0 ,
U∞
V0 x 0 υx0 U ∞ ⎟⎠
⎝ x0 y 0 υ
⎛ x y V y U y U y2 U ⎞
v
⎟.
= g1 ⎜⎜ , , 0 0 , ∞ 0 , ∞ 0 ,
⎟
V0
x
y
υ
V
x
υ
x
U
0
0
0
0
0
∞
⎝
⎠
Since the physics of the problem rejects V0, x0 and y0 as being characteristic
properties, let us successively eliminate these reference quantities.
Start, for
example, with V0, and transform the above expressions such that only one term
remains depending on V0. This may be done by introducing a new parameter in
place of U ∞ y 0 / V0 x0 , obtained by multiplying U ∞ y 0 / V0 x0 with V0 y 0 / υ . However,
the last expressions already contain this parameter, i.e. U ∞ y 02 / υx 0 . Thus, we may
multiply U ∞ y 02 / υx 0 with U / U ∞ . Consequently, we have
⎛ x y V0 y 0 U y 02 ⎞
u
⎟
= f 2 ⎜⎜ , ,
,
⎟
U∞
⎝ x 0 y 0 υ υx 0 ⎠
,
⎛ x y V0 y 0 U y 02 ⎞
⎟
= g 2 ⎜⎜ , ,
,
⎟
υ
⎝ x 0 y 0 υ υx 0 ⎠
v y0
which assume physical significance in u and v only when independent of V0. Thus,
⎛ x y U y 02 ⎞
u
⎟
= f 2 ⎜⎜ , ,
⎟
U∞
x
y
x
υ
0 ⎠
⎝ 0 0
,
⎛ x y U y 02 ⎞
⎟.
= g 2 ⎜⎜ , ,
⎟
x
y
x
υ
υ
0 ⎠
⎝ 0 0
v y0
Now, according to the mathematical principle, we are free to transform the
variables of the last expressions in any way we like, but only without changing the
number of these variables. Among the possible transformations we pick the one to
be convenient when we consider the physical principle. Thus, we transform the
independent variables, say x0. We do this by introducing a new variable in place of
U y 02 / υx0 , obtained by dividing U y 02 / υx0 by x / x0 . Then, according to the physical
principle, the expressions assume significance only when the left and right hand sides
are dimensionally homogenous. Since the problem statement clearly indicates to the
absence of any characteristic length in the x-direction, the velocity and,
39
consequently, the right-hand-side of these expressions must be independent of x0.
This fact reduces them to
⎛ y Uy2
u
= f 3 ⎜⎜ , 0
U∞
⎝ y 0 υx
⎞
⎟
⎟
⎠
,
⎛ y Uy2
= g 3 ⎜⎜ , 0
υ
⎝ y 0 υx
v y0
⎞
⎟.
⎟
⎠
Next, we repeat for y the preceding steps pertaining to x . Thus, reconsider
the mathematical principle, and without any reduction, transform independent
variables of the above expressions in a way suitable to later physical interpretation
such that only one term remains depending on y0. This may be done by introducing a
new variable in place of U y 02 / υx , obtained multiplying U y 02 / υx by ( y / y 0 ) 2 .
Moreover, since there is no characteristic length in the y-direction, according to the
physical principle, the velocity and, consequently, the right-hand-side of the last
expressions must be dimensionally homogenous, that is, independent of y0, and they
must reduce to
⎛Uy2
u
= f 4 ⎜⎜
U∞
⎝ υx
⎞
⎟⎟
⎠
,
v=
υ
⎛Uy2
g 4 ⎜⎜
y ⎝ υx
⎞
⎟⎟
⎠
which, together with in terms of ηg 4 = g 5 , may be rearranged as
u
= f 5 (η )
U∞
,
⎛ υU
v = ⎜⎜
⎝ x
⎞
⎟⎟
⎠
1/ 2
g 5 (η )
where η = y /(υx / U )1 / 2 or in more general form (dimensionless)
u = f 5 (η )
and
v = G ( x) g 5 (η ) ,
where
η=
y
.
g ( x)
(4.6)
Notice that even though we use the same transformation arguments for both
cases of flow past a horizontal flat plate and a semi-infinite wedge, the functions of
f5, g5, G and g are different for each case.
40
The Stream Function
Further, we introduce the stream function ψ , defined as
u=
∂ψ
∂y
,
v=−
∂ψ
.
∂x
(4.7)
The introduction of the stream function satisfies the continuity equation
(4.4b) identically, and then the boundary layer equations can be represented just by a
single equation via substitution of (4.7) into (4.4a). Therefore we have
∂ψ ∂ 2 ψ ∂ψ ∂ 2 ψ
dU ∂ 3 ψ
−
=U
+
.
∂y ∂x∂y ∂x ∂y 2
dx
∂y 3
(4.8)
Equation (4.8) is the dimensionless velocity boundary layer equation in the form of
stream function. It can be simplified further using the similarity transformation (4.6),
which will be shown in the next two sections.
4.5
Solution of the Boundary Layer Equations Past a Horizontal Flat Plate
Now we want to seek the solution of boundary layer equations for the case of
flow past a horizontal flat plate (Figure 4.1).
Starting with the dimensionless
boundary layer equation in the form of stream function (4.8), we will transform it
using similarity transformation. This will result an ordinary differential equation,
namely the Blasius equation.
41
4.5.1
Similarity Transformation
From the result of (4.6), we may write it in the terms of a more convenient
dependent variable as
u = f ′(η )
,
η=
y
g ( x)
(4.9)
originally suggested by H. Blasius in 1908 following a different physical argument.
Then the derivatives of η are
∂η
yg ′
g′
=− 2 =− η
∂x
g
g
and
∂η 1
= .
∂y g
Or, the dependant variable in the term of stream function is
y
η
′ η = g ( x) f (η ) .
ψ = ∫ udy = ∫ f gd
0
0
(4.10)
To express equation (4.8) in the terms of similarity variables, we find the
following derivatives from (4.10):
∂ψ
∂η
= g ′f + gf ′
= g ′( f − f ′η )
∂x
∂x
∂ 2ψ
∂η
g′
= f ′′
= − f ′′η
∂x∂y
∂x
g
∂η
∂ψ
= gf ′
= f′
∂y
∂y
∂ 2ψ
∂η
f ′′
= f ′′
=
2
∂y
g
∂y
∂ 3ψ
f ′′′ ∂η f ′′′
=
=
3
g ∂y g 2
∂y
where the primes on f and g denote derivatives with respect to η and x respectively.
42
Substituting all these derivatives in (4.8) and set U ( x) = constant as
mentioned in the last paragraph in Section 4.3, we get
⎛ g′
⎞
f ′′ f ′′′
′ ⎟⎟ − g ′( f − f ′η )
f ′⎜⎜ −
f ′η
= 2
g
g
⎝ g
⎠
or
f ′′′ + gg ′ff ′′ = 0
(4.11)
subject to
f (0) = f ′(0) = 0
,
f ′(∞) = 1 .
(4.12a,b)
We already have the velocity component u in the term of f such that
u = f ′(η ) . The velocity component v is
v=−
∂ψ
∂
= − [g ( x) f (η )] = g ′(ηf ′ − f ) .
∂x
∂x
(4.13)
If a similarity solution of the form (4.9) is to be possible, the boundary
condition (4.12b) must represent both the boundary condition for y → ∞ and the
initial condition at x = 0 .
This is possible provided that g (0) = 0 .
necessary condition for existence of a similarity solution.
This is a
A second necessary
condition is that the coefficient gg ′ must be either zero or a nonzero constant.
However, it cannot be zero because no solution of f ′′′ = 0 exists to satisfy (4.12).
Since gg ′ ≠ 0 , we take gg ′ = 1 / 2 for convenience and then equation (4.11) becomes
f ′′′ +
1
ff ′′ = 0
2
(4.14)
43
subject to conditions (4.12). This equation is known as the Blasius equation. In
order to complete the similarity solution, we must solve equation gg ′ = 1 / 2 subject
to g (0) = 0 which gives g ( x) = x . So that the similarity variable η defined by
(4.9) becomes
η=
y
x
(4.15)
Remark, if in the equation (4.11) we take gg ′ = 1 then we have
f ′′′ + ff ′′ = 0
(4.16)
which is also known as the Blasius equation subject to the same boundary conditions
(4.12), where the similarity variable η is defined as
η=
4.5.2
y
2x
(4.17)
Solution of Blasius Equation via Blasius Series
Now we want to solve the Blasius equation (4.14), i.e. with gg ′ = 1 / 2 ,
subject to conditions (4.12). The equation can be solved via series expansion which
is known as the Blasius series.
First, the function f (η ) can be expanded in a Taylor series as
∞
ηn
n=0
n!
f (η ) = ∑ An
= A0 + A1η + A2
η2
2!
+ A3
η3
3!
+ ….
(4.18)
44
Then the derivatives of f (η ) are
η n −1
∞
f ′(η ) = ∑ An
n =1
(n − 1)!
∞
f ′′(η ) = ∑ An +1
n =1
∞
= ∑ An +1
η n −1
(n − 1)!
ηn
n =0
∞
= ∑ An + 2
n =0
n!
,
ηn
n!
and
∞
f ′′′(η ) = ∑ An + 2
n =1
η n −1
(n − 1)!
∞
= ∑ An +3
n =0
ηn
n!
.
Obviously, if we apply the conditions f (0) = 0 and f ′(0) = 0 , we will obtain
A0 = 0 and A1 = 0 . Substituting f (η ) and its derivatives into the Blasius equation
(4.14), we get
∞
2∑ An + 3
n =0
ηn
⎛ ∞
η n ⎞⎛ ∞
ηn ⎞
⎟⎟⎜⎜ ∑ An + 2
⎟=0
+ ⎜⎜ ∑ An
n! ⎝ n =0
n! ⎠⎝ n =0
n! ⎟⎠
After applying the Cauchy product on the second term of the last equation, and since
A0 = A1 = 0 , the result is
⎛ 2 An +3 n − 2 An − k Ak + 2 ⎞ n
⎜⎜
⎟⎟η = 0 .
+∑
∑
n!
n =0 ⎝
k = 0 k!( n − k )! ⎠
∞
The coefficient of ηn in the last equation, is equal to zero for every n, i.e.
2 An +3 n − 2 An − k Ak + 2
+∑
=0
n!
k = 0 k!( n − k )!
45
or
An +3
n!
1 n−2
=− ∑
An − k Ak + 2
2 k =0 k!(n − k )!
(4.19)
1 n−2 ⎛ n ⎞
= − ∑ ⎜⎜ ⎟⎟An − k Ak + 2
2 k =0 ⎝ k ⎠
which provides
A3 = 0
,
A4 = 0
,
⎛ 1⎞
A5 = ⎜ − ⎟ A22
⎝ 2⎠
,
1⎛
5!
⎞ ⎛ 1⎞
A8 = − ⎜ A5 A2 +
A2 A5 ⎟ = ⎜ − ⎟ 11A23
2⎝
3!2!
⎠ ⎝ 2⎠
,
1⎛
8! 2 8!
⎞ ⎛ 1⎞
A11 = − ⎜ A8 A2 +
A5 +
A2 A8 ⎟ = ⎜ − ⎟ 375 A23
2⎝
3!5!
6!2!
⎠ ⎝ 2⎠
,
2
A6 = 0
,
A7 = 0
,
3
A9 = 0
,
A10 = 0
◊
◊
◊
It can be shown that An are zeros except for A2, A5, A8, A11, …. Moreover, every
nonzero coefficients of f(η) can be expressed in terms of A2. Hence, the series of
(4.18) can be simplified as
∞
f (η ) = ∑ A3n + 2
n=0
η 3n + 2
(3n + 2)!
which, from (4.19), can be written as
n
η
⎛ 1⎞
f (η ) = ∑ ⎜ − ⎟ C n A2n +1
2⎠
(3n + 2)!
n =0 ⎝
∞
where C0 = 1, and
n −1
⎛ 3n − 1⎞
⎟⎟ .
C n = ∑ C i C n −i −1 ⎜⎜
i =0
⎝ 3i ⎠
3n + 2
(4.20)
46
The values of the coefficients Cn until n = 10 are
C1 = 1 ,
C2 = 11 ,
C3 = 375 ,
C4 = 27897 ,
C5 = 3817137 ,
C 6 = 8.6587 × 10 8 ,
C7 = 3.0308 × 1011 , C8 = 1.5517 × 1014 , C 9 = 1.1143 × 1017 and C10 = 1.0851 × 10 20 .
Equation (4.20) is a series solution of Blasius equation (4.14), and it satisfies
the boundary condition at η = 0 . The third boundary condition, i.e., f ′(∞) = 1 is
used to evaluate A2. Using Mathematica (see Figure 4.3), the value of A2 is found as
0.332057 (Goldstein (1938) has obtained a value of 0.33206 using numerical
methods).
Notice
that
this
is
also
the
value
of
f ′′(0)
since
f ′′(η ) = A2 + A3η + A4η 2 / 2!+ ….
Similarly, it can be shown that the solution of (4.16), which is another form
of Blasius equation, is
η 3n + 2
∞
f (η ) = ∑ (−1) n C n A2n +1
n =0
(3n + 2)!
.
This is similar to (4.20) but with the term (–1/2)n replaced by (–1)n. This is due to
the selection of gg ′ that we have chosen in equation (4.11) before, i.e. gg ′ = 1 / 2
for (4.14) and gg ′ = 1 for (4.16). Again, from the condition f ′(∞) = 1 , we can find
that A2 = 0.469600 (see Figure 4.3).
Radius of Convergence
The radius of convergence ρ (P ) of the power series
P ( x) = ∑ a n x n
n
47
Figure 4.3
Mathematica programming for finding A2
may in principle be found by d’Alembert’s ratio test as
a n −1
.
n→∞ a
n
ρ ( P) = lim
(4.21)
(Henrici, 1974).
Of course knowing only a finite number of the coefficients a n , we cannot
take the limit, but can only estimate it. In 1957, C. Domb and M. F. Sykes have
introduced a method on estimating the value of radius of convergence graphically,
that is using Domb-Sykes plot. Domb and Sykes have pointed out that it is more
reliable to plot a n a n −1 versus 1 n , i.e. to bring n → ∞ to the origin, rather than
plotting a n −1 a n versus n . From the Domb-Sykes plot, the radius of convergence
can be estimated by linear extrapolation, which is the reciprocal value of the
interception at 1 n = 0 (Van Dyke, 1974). Therefore, equation (4.21) can also be
written as
48
ρ ( P) =
1
a
lim n
1 / n →0 a
n −1
.
To find the radius of convergence of the Blasius series (4.20), we may
rearrange the series as
∞
f (η ) = η 2 ∑ a nη 3n
(4.22)
n =0
n
n +1
⎛ 1 ⎞ C n A2
. Expression (4.22) is a formal power series of η 3 ,
where a n = ⎜ − ⎟
2
(
3
n
+
2
)!
⎠
⎝
aside from a multiplicative term η 2 . Hence, we can plot the values of a n a n −1
versus 1 n , where
an
Cn
(−1 / 2) A2
.
=
a n −1 3n(3n + 1)(3n + 2) C n −1
The Domb-Sykes plot of (4.22) is shown in Figure 4.4, where the radius of
convergence can be estimated as 1 / 0.0054215 = 184.4508 . Therefore, we can say
that the series (4.22) converges for η such that η 3 < 184.4508 or η < 5.6924 .
4.5.3
Results and Analysis
Here we will present the results from the solution of Blasius equation (4.14),
followed by the analysis of the results.
49
an
a n −1
–0.0054215
-0.00545
-0.0055
-0.00555
-0.0056
-0.00565
0.05
Figure 4.4
(i)
0.1
0.15
0.2
0.25
0.3
1
n
Domb-Sykes plot of the Blasius series (4.22)
Result
Using C++ programming, about fifty terms are considered in the series (4.20)
for calculating the values of f , f ′ and f ′′ (see Appendix A), as the solution of the
Blasius equation (4.14). The results are shown in Table 4.1. Earlier, in (4.9) we
have set the parallel component of velocity u = f ′(η ) as similarity variable. The
lateral component of velocity v is given by (4.13), and for gg ′ = 1 / 2 , i.e. g ( x) = x ,
it becomes
v=
1
2 x
(η f ′ − f ) .
(4.23)
The values of v are also included in Table 4.1. The velocity profiles for u and v are
compared to the solution obtained by Howarth (1938), which are found using forthorder Runge-Kutta method (see Figure 4.5). From Figure 4.5, the components of
velocity increase from zero at the wall to a maximum value at the edge of the
boundary layer; the patterns that are in agreement with the streamline shapes.
50
Remark, the solution of another form of Blasius equation (4.16) is shown in
Table 4.2.
(ii)
Analysis of Result
By examining the solution of the Blasius equation for large η , it can be
shown that
f (η) ≅ η − 1.721
as
η→∞.
This approximation is described in Figure 4.6, since the curve f (η ) almost
overlapped with line η − 1.721 for large η. Hence
v=
1
2 x
(η f ′ − f ) ≅
1 ⎛ 1.721 ⎞
⎜
⎟
2 ⎜⎝ x ⎟⎠
as
η→∞.
We can see that v is finite as required, except for the limit x → 0 . Thus, as the flow
in the outer region is concerned, the pressure of the boundary layer acts like a weak
vertical flow at the plate surface which tends to displace streamlines outward. The
physical reason for the outward displacement of streamlines in the outer flow is the
deceleration of fluid that occurs in the boundary layer due to the no slip condition at
the plate surface.
There is an important property of the Blasius solution, which reflects a
general property of the boundary layer equations.
The fact is that the Blasius
solution is independent of the length of the plate. To demonstrate it we notice that
from (4.15) it can be shown that η is completely independent of L. To see it, we can
write η in terms of the original dimensional variables ( x , y ) as
η=
y
x
=
( y / L)
( x / L )1 / 2
⎛U∞L ⎞
⎟
⎜
⎝ υ ⎠
1/ 2
=
y
x
U ∞ /υ
51
Table 4.1 : Solution of the Blasius equation (4.14), i.e., when gg ′ = 1 / 2 using the
Blasius series
η
f
u= f′
f ′′
v = (η f ′ − f )/2 x
0
0
0
0.332057
0.00000
0.5
0.041493
0.165887
0.330914
0.020725
1.0
0.165573
0.329783
0.323010
0.082105
1.5
0.370141
0.486793
0.302583
0.180024
2.0
0.650029
0.629771
0.266753
0.304757
2.5
0.996319
0.751265
0.217413
0.440922
3.0
1.396819
0.846050
0.161361
0.570666
3.5
1.837712
0.913046
0.107773
0.678975
4.0
2.305763
0.955524
0.064243
0.758167
4.5
2.790154
0.979520
0.033981
0.808843
5.0
3.283294
0.991547
0.015906
0.837221
5.5
3.775432
0.997554
0.007335
0.855558
6.0
4.279641
0.998977
0.002402
0.857111
1
0.8
u= f′
v=
0.6
1
2 x
(η f ′ − f )
0.4
0.2
○
Present
Howarth (1938)
η
0
0
Figure 4.5
1
2
3
4
5
6
The velocity profiles of Blasius equation (4.14), i.e., when gg ′ = 1 / 2
52
Table 4.2 : Solution of the Blasius equation (4.16), i.e., when gg ′ = 1 using the
Blasius series
η
f
u= f′
f ′′
v = (η f ′ − f ) / 2x
0
0
0
0.469600
0.000000
0.5
0.058643
0.234227
0.460732
0.0413449
1.0
0.232990
0.460633
0.434404
0.160968
1.5
0.515032
0.661474
0.365181
0.337417
2.0
0.886797
0.816695
0.255669
0.527921
2.5
1.322438
0.916808
0.145638
0.68598
3.0
1.795568
0.969055
0.067708
0.786018
3.5
2.286406
0.990709
0.028531
0.835146
4.0
2.782380
0.997842
0.016383
0.854884
4.5
3.282063
0.999830
0.004015
0.860671
5.0
3.781725
0.999955
0.000926
0.861291
5.5
4.282134
1.000000
0.000183
0.861161
6.0
4.782150
1.000000
0.000015
0.861150
f(η)
7
6
5
4
3
2
1
η
0
0
1
2
3
4
5
6
7
8
-1
-2
Figure 4.6
-1.721
The sketch of f(η) of Blasius equation (4.14), i.e. gg ′ = 1 / 2 , to be
approximated as a linear function as η → ∞
53
In fact, the distance from the leading edge of the plate that provides the relevant
measure of the relative importance of viscous and inertia in the governing
momentum equation (4.1a). The fact that the solution is independent of L is a
reflection of the fact that the boundary layer equations are parabolic, with
characteristic that proceed in the direction of increasing x. This means that the
solution of the boundary layer equations at a given position, say x ∗ , depends only on
conditions within the boundary layer for x < x ∗ (upstream) but is not at all
influenced by conditions downstream.
This is a general characteristic of the
boundary layer equations (4.4). In the problem of flow past a flat plate, it is reflected
by the fact that the solution at any point x < L is completely unaltered by the
proximity of x to the end of the plate. Indeed, the solution for x < L is precisely the
same as if the plate were semi-infinite in extent.
(iii)
Boundary Layer Thickness and Skin Friction
The boundary layer thickness δ is taken as equal to the value of y component
when u reaches as 99 percent of U∞ . From Figure 4.3, it is found that u = 0.99U ∞
at η = 4.92 . Therefore, from the last equation we get
δ = 4.92
υx
U∞
δ
= 4.92 Re −x1 / 2
x
or
(4.24)
where Rex is the local Reynolds number defined as
Re x =
U∞x
υ
.
(4.25)
The parabolic growth ( δ ∝ x ) of the boundary layer thickness is in good
agreement with experiment. For example, air at ordinary temperatures flowing at
U ∞ = 1 m/s, the Reynolds number at a distance of 1 m from the leading edge is
54
Re x = 6 × 10 4 , and (4.24) gives δ = 2 cm, showing that the boundary layer is indeed
thin (Kundu, 1990).
Earlier, from (3.19) we have the local skin friction which defined as
⎛ ∂u ⎞
τ w = µ ⎜⎜ ⎟⎟ ~ ρ U ∞2 Re −1 / 2 =
⎝ ∂y ⎠ y =0
µU∞
L
Re1 / 2 ,
but
⎛ ∂u ⎞
f ′′(η )
f ′′(0)
⎜⎜ ⎟⎟ =
.
=
g ( x) η =0
x
⎝ ∂y ⎠ y =0
Hence, using the definition of the local skin friction at the plate (3.19)
together with the last equation, we get
τw =
µU∞
L
Re1 / 2
f ′′(0)
x
=
µU∞
L
Re
f ′′(0)
x
(4.26)
It is seen that τ w → ∞ as x → 0 . We may also note from (4.23) that v
diverges as x → 0 for all η other than η = 0 , where v = 0 for all x. This singularity
in the solution as x → 0 suggests that the boundary layer approximation breaks
down as we approach the leading edge of the plate. This is not surprising because
the boundary layer approximation is based on the assumption that derivatives with
respect to y exceed those with respect to x by a large amount proportional to Re1 / 2 .
However, this assumption breaks down near x = 0 , where there is a discontinuity in
boundary conditions on the axis y = 0 . Anyway, this error for x → 0 does not have
a serious effect on the solution for other values of x.
55
It is common practice to report the nondimensional local skin friction
coefficient on the top and bottom surfaces of the plate as
C fx =
=
τw
ρ U ∞2 / 2
µU∞
L
Re
1
f ′′(0)
x
ρ U ∞2 / 2
⎛ U Lx ⎞
= 2 f ′′(0)⎜ ∞ ⎟
⎝ υ ⎠
−1 / 2
⎛U x ⎞
= 2 f ′′(0)⎜ ∞ ⎟
⎝ υ ⎠
−1 / 2
or, from (4.25), the last expression becomes
C fx = 2 f ′′(0) Re −x 1 / 2 .
(4.27)
From the solution of Blasius equation (4.14), using the value of
f ′′(0) = 0.332057 we get
C fx = 0.664 Re −x 1 / 2 .
The average skin friction coefficient that corresponds to the local result is
Cf =
1 L
C f , x d x = 1.328 Re −1 / 2
∫
0
L
a result which is called the Blasius skin friction law. This result is valid when
Re ≤ 5 x 105 (Kundu, 1990; Holman, 1990).
56
4.6
Solution of the Boundary Layer Equations Past a Semi-infinite Wedge
Next we will solve the boundary layer equations for the case of flow past a
semi-infinite wedge (Figure 4.2). We will follow the same process in the preceding
section, i.e. starting with the similarity transformation of equation (4.8). This will
result an ordinary differential equation, namely the Falkner-Skan equation.
4.6.1
Similarity Transformation
As stated in the last paragraph in Section 4.3, the external velocity U(x) at the
boundary layer edge for flow past a semi-infinite wedge is not a constant like in the
previous case, so it must be found. Therefore, instead of using ψ = g ( x) f (η ) like in
the previous case, we introduce more general transformation for ψ that is
ψ = F ( x) f (η )
,
η=
y
g ( x)
(4.28)
where the function F(x) actually containing both U(x) and g(x) which will be shown
later. Then we have
∂ψ
g′
′
= F ′f − Ff η
∂x
g
∂ 2ψ
F ′f ′
g′
g′
=
− Ff ′′η 2 − Ff ′ 2
∂x∂y
g
g
g
∂ψ Ff ′
=
g
∂y
∂ 2ψ Ff ′′
= 2
g
∂y 2
∂ 3ψ Ff ′′′
= 3 .
g
∂y 3
57
Substituting all these derivatives into (4.8) yields
⎞
⎛
FF ′g
UU ′g 3
Ff ′′′
′
′
⎟
.
f ′ 2 − ⎜⎜
=
+
f
f
2
2
⎟
FF ′g − F g ′ FF ′g − F 2 g ′
⎝ FF ′g − F g ′ ⎠
For
simplicity,
we
should
try
UU ′g 3 /( FF ′g − F 2 g ′) = 1
which
implies
F ( x) = U ( x) g ( x) . Then the last expression reduce to
⎛ Ug ′ ⎞
f ′′′
⎟⎟ ff ′′ = 1 +
f ′ 2 − ⎜⎜1 +
.
U ′g 2
⎝ U ′g ⎠
(4.29)
To obtain an ordinary differential equation for f(η), we must have
Ug ′ / U ′g = constant and U ′g 2 = constant, i.e.
Ug ′
= C1
U ′g
or
g′
U′
= C1
.
g
U
Integrating both sides, we get
ln g = C1 ln C 2U
which yields
g ∝ U C1
or
g2 ∝U k
where C1, C2 and k are constants. Since U ′g 2 = constant, we get
58
U ′U k = constant
or
∫U
k
dU ∝ x .
Therefore, we get U ( x) ∝ ( x − x0 ) m if k ≠ −1 or U ( x) ∝ e cx if k = −1 , where
In the case U ( x) = x m , since
x0, m and c are some constants of integration.
g 2 ∝ 1 / U ′ we get
g2 ∝
1
x
g ∝ x (1− m ) / 2
or
m −1
and for convenience we choose
1
⎡ 2 x 1− m ⎤ 2
g ( x) = ⎢
⎥
⎣ (m + 1) ⎦
to get
1
⎛ 2 x m +1 ⎞ 2
⎟⎟ .
F ( x) = U ( x) g ( x) = ⎜⎜
⎝ m +1 ⎠
(4.30)
Therefore we obtain the similarity variables (4.28) as
⎛ 2 x m +1 ⎞
⎟⎟
ψ = ⎜⎜
+
m
1
⎝
⎠
1/ 2
f (η )
,
⎡ (m + 1) x m −1 ⎤
η = y⎢
⎥
2
⎣
⎦
1/ 2
(4.31)
which leads equation (4.29) to
f ′′′ + ff ′′ + β (1 − f ′ 2 ) = 0
(4.32)
59
where
β=
2m
m +1
subject to
f (0) = f ′(0) = 0
f ′(∞) = 1 .
,
(4.33)
Equation (4.32) is known as the Falkner-Skan equation, established in 1931.
In addition, the velocity components u and v are
u = U ( x) f ′(η ) = x m f ′(η ) ,
⎡ x m −1 ⎤
v=⎢
⎥
⎣ 2(m + 1) ⎦
4.6.2
1/ 2
[(1 + m) f (η ) + (1 − m)ηf ′(η )] .
(4.34a)
(4.34b)
Solution of Falkner-Skan Equation via Perturbation Method
The perturbation method is suitable to solve the Falkner-Skan equation
because the equation contains a parameter β, which can be designated as the
perturbation quantity that is considered small compared to the others (Aziz and Na,
1984; Nayfeh, 1973). In this approach, we will follow two steps, i.e. the first is the
expansion of series and the second is the improvement of series using Shanks
transformation. We first expand the function f (η ) as series in β such that
∞
f (η ; β ) = ∑ β n f n (η ) .
n =0
60
Substituting the series and its derivatives into Falkner-Skan equation (4.32), we will
get the resulting sequence of perturbation equations together with the boundary
conditions. The resulting sequence up to eleventh term is
O(β0): f 0′′′+ f 0 f 0′′ = 0
f 0 (0) = f 0′(0) = 0 ,
O(β):
f 0′(∞) = 1
f1′′′+ f 0 f 1′′+ f 0′′f1 = f 0′ 2 − 1
f n (0) = f n′ (0) = 0 ,
f n′ (∞) = 0
for
n ≥1
O(β2): f 2′′′+ f 0 f 2′′ + f 0′′f 2 = 2 f 0′ f1′ − f 1 f1′′
O(β3): f 3′′′+ f 0 f 3′′+ f 0′′f 3 = 2 f 0′ f 2′ + f1′2 − f1 f 2′′ − f 2 f1′′
O(β4): f 4′′′+ f 0 f 4′′ + f 0′′f 4 = 2( f 0′ f 3′ + f1′f 2′) − f1 f 3′′− f 2 f 2′′ − f 3 f1′′
O(β5): f 5′′′+ f 0 f 5′′+ f 0′′f 5 = 2( f 0′ f 4′ + f1′f 3′) − f 2′2 − f1 f 4′′ − f 2 f 3′′− f 3 f 2′′ − f 4 f1′′
O(β6): f 6′′′+ f 0 f 6′′ + f 0′′f 6 = 2( f 0′ f 5′ + f 1′ f 4′ + f 2′ f 3′) − f1 f 5′′ − f 2 f 4′′ − f 3 f 3′′ − f 4 f 2′′ − f 5 f1′′
O(β7): f 7′′′+ f 0 f 7′′ + f 0′′f 7 = 2( f 0′ f 6′ + f1′ f 5′ + f 2′ f 4′) + f 3′ 2 − f 1 f 6′′ − f 2 f 5′′ − f 3 f 4′′ − f 4 f 3′′
− f 5 f 2′′ − f 6 f1′′
O(β8): f8′′′+ f 0 f8′′+ f 0′′f8 = 2( f 0′ f 7′ + f1′f 6′ + f 2′ f5′ + f 3′ f 4′) − f1 f 7′′ − f 2 f 6′′ − f 3 f5′′− f 4 f 4′′
− f 5 f 3′′− f 6 f 2′′ − f 7 f1′′
O(β9): f 9′′′+ f 0 f 9′′ + f 0′′f 9 = 2( f 0′ f8′ + f1′f 7′ + f 2′ f 6′ + f 3′ f 5′) + f 4′2 − f1 f8′′− f 2 f 7′′ − f 3 f 6′′
− f 4 f 5′′− f 5 f 4′′ − f 6 f 3′′− f 7 f 2′′ − f8 f1′′
61
O(β10): f10′′′ + f 0 f10′′ + f 0′′f10 = 2( f 0′ f 9′ + f1′f8′ + f 2′ f 7′ + f 3′ f 6′ + f 4′ f 5′) − f1 f 9′′ − f 2 f8′′− f 3 f 7′′
− f 4 f 6′′ − f 5 f 5′′− f 6 f 4′′ − f 7 f 3′′− f8 f 2′′ − f 9 f1′′ .
Notice that the zero-order problem corresponds to the Blasius equation
(4.14), then it can be solved. On the other hand, the problems for O(β) up to O(β10)
result the sequence of linear differential equations.
Hence, they can be solved
numerically, for example using Runge-Kutta method. Then, each equation of O(βn)
will give the result of function f n (η ) . Therefore the solution of Falkner-Skan
equation (4.32) can be written as
f (η ; β ) = f 0 (η ) + β f1 (η ) + β 2 f 2 (η ) + … .
Shanks Transformation
In 1955, D. Shanks introduced a family of four nonlinear transformations to
accelerate the convergence of slowly convergent and divergent series. Out of a
number of transformations that are available, we select the simplest two designated
by Shanks as e1 and e1m . The merit of these transformations is that they do not
require any information about the analytic structure of the solution. The application
is therefore rather blind and this raises the question of how reliable the final results
are. However, the pattern of convergence is often manifested so convincingly that it
speaks for the accuracy of the final results.
We consider first the e1 transformation. If three partial sums S n −1 , S n and
S n +1 of a series are known, e1 is defined as
e1 ( Sn ) =
Sn +1Sn −1 − Sn2
.
Sn +1 + Sn −1 − 2Sn
62
The success of e1 in improving the convergence lies in the fact that, if applied to a
geometric series, it yields the exact sum. It is therefore likely to work best on series
with nearly geometric coefficients.
The second transformation e1m is the mth iteration of e1 . For example, e12 is
obtained by treating the sequence e1 ( S n ) as partial sums, and so on. Thus, the
minimum number of terms needed to apply e12 is five. Similarly, seven terms are
needed to continue up to e13 , and so on (Aziz and Na, 1984; Van Dyke, 1975).
Now we want to apply the Shanks transformation on a result from the
solution of the Falkner-Skan equation (4.32).
Since the value of f ′′(0; β ) is
important in finding the skin friction, we will demonstrate the application of the
Shanks transformation on the expansion series of f ′′(0; β ) , which can be obtained as
∞
f ′′(0; β ) = ∑ β n f n′′(0)
n =0
= 0.4696 + 1.29893β − 1.52215β 2 + 3.56297 β 3 − 10.6720β 4
+ 36.4617 β 5 − 134.945β 6 + 526.529β 7 − 2132.41β 8
+ 8878.32 β 9 − 37762.7 β 10
(4.35)
(Aziz and Na, 1984). The coefficients of higher order in the series (4.35) which are
very large, exhibit that it may be a divergent series. Therefore, it is questionable in
applying the Shanks transformation to find the desired values in a divergent series,
since it may deviant from the purpose of the transformation. However, by this
method, Van Dyke (1974) has successfully found the desired values from the series
of ground-state energy of anharmonic oscillator which has zero radius of
convergence.
We shall now apply the transformations e1 and e1m to find f ′′(0; β ) for a
value of β. Table 4.3 presents the finding of f ′′(0; β ) for β = 1 . As the first step,
we calculate the partial sums of the series (4.35). These appear in the second column
of Table 4.3. The final value in the second column indicates that the value of
63
f ′′(0;1) is equal to –30595.609874 without applying the Shanks transformation.
This value does not make sense, reflecting the fact that the selection of β = 1 is not
small enough to be designated as a perturbation quantity. After completing the
second column, we may apply transformations e1 to fill the third column. We then
repeat it for e1m until we find a single value. Finally we find that f ′′(0;1) = 1.232623 .
Table 4.4 gives the final results for various values of β, compared to the
results of Cebeci and Keller (1971) which are found via Newton’s method.
Table 4.3 : Iterated application of Shanks transformation to the series (4.33), with
β=1
n
Sn
e1
e12
e13
e14
e15
0
0.469600
1
1.768529
1.067675
2
0.246380
1.312898 1.210872
3
3.809349
1.138180 1.241830 1.230621
4
–6.862651
1.392997 1.224260 1.233572
1.232539
5
29.599035
0.893491 1.244073 1.231982
1.232697 1.232623
6
–105.345958
2.069371 1.213054 1.233280
1.232560
7
421.182851
–1.081582 1.271184 1.231184
8
–1711.227061
9
7167.089345
10
–30595.609874
8.206277 1.147714
–21.201637
64
Table 4.4 : Comparison of f ′′(0; β )
β
Present
Cebeci and Keller
(1971)
4.6.3
–0.195
0.056027
0.055177
–0.19
0.085840
0.085702
–0.1
0.319266
0.319278
–0.05
0.400322
0.400330
0
0.469600
0.469603
0.10
0.587034
0.587037
0.20
0.686706
0.686711
0.40
0.854418
0.854423
0.80
1.120280
1.120269
1.00
1.232623
1.232561
1.20
1.335793
1.335724
1.60
1.521689
1.521516
Results and Analysis
In this section we will present the results from the solution of the FalknerSkan equation (4.32), followed by the analysis of the results.
(i)
Result
Table 4.4 shows the values of f ′(η ) = u / U ( x) for selected values of β in the
range – 0.1988 < β < 2.00 which corresponds to – 0.0904 < m < ∞ , as obtained by
D. R. Hartree in 1937 (Kreith and Bohn, 1997; Walz, 1969). For m < 0 (or β < 0 ),
65
the calculation is stopped at m = −0.0904 because at this stage the separation
phenomenon has occurred.
Table 4.5 : The solution of Falkner-Skan equation for various values of β
(Walz, 1969)
β
–0.1988
–0.18
–0.14
0
0.5
1.0
2.0
m
–0.0904
–0.0826
–0.0654
0.0000
0.3333
1.0
∞
f ' (η) = u/U(x)
η
0
0
0
0
0
0
0
0
0.1
0.0010
0.0138
0.0247
0.0470
0.0903
0.1183
0.1588
0.2
0.0040
0.0293
0.0507
0.0939
0.1756
0.2266
0.2980
0.3
0.0089
0.0467
0.0781
0.1408
0.2558
0.3252
0.4186
0.4
0.0158
0.0659
0.1069
0.1876
0.3311
0.4144
0.5219
0.6
0.0358
0.1094
0.1684
0.2806
0.4670
0.5662
0.6834
0.8
0.0636
0.1598
0.2347
0.3720
0.5834
0.6859
0.7958
1.0
0.0991
0.2166
0.3050
0.4606
0.6811
0.7778
0.8717
1.4
0.1927
0.3463
0.4534
0.6244
0.8258
0.8968
0.9530
2.0
0.3802
0.5621
0.6712
0.8167
0.9421
0.9732
0.9914
2.4
0.5230
0.6995
0.7927
0.9011
0.9760
0.9905
0.9976
3.0
0.7278
0.8607
0.9168
0.9691
0.9952
0.9985
0.9998
3.4
0.8364
0.9286
0.9616
0.9880
0.9986
0.9996
1.0000
4.0
0.9399
0.9798
0.9907
0.9978
0.9999
1.0000
–
4.4
0.9741
0.9927
0.9970
0.9994
1.0000
–
–
5.0
0.9945
0.9989
0.9996
1.0000
–
–
–
5.4
0.9984
0.9997
1.0000
–
–
–
–
6.0
0.9999
1.0000
–
–
–
–
–
6.4
1.0000
–
–
–
–
–
–
66
The resulting sequence of perturbation series is solved and the results of
f ′(η ) is plotted using Mathematica (see Appendix B). The velocity profiles of
u / x m = f ′(η ) is illustrated in Figure 4.7 for various values of β. Notice that for
β = 0 , the Falkner-Skan equation (4.32) reduces to the Blasius equation (4.16).
Therefore, the comparison of the solution of the equation (4.32) for β = 0 and the
solution of the equation (4.16) (which has obtained using Blasius series in Section
4.5.3) has been made in Figure 4.7.
u
= f ′(η )
xm
1
0.8
β =2
1
0.5
0.6
0
0.4
− 0.1988
•
0.2
1
Figure 4.7
2
3
Present
Blasius series
4
5
η
Falkner-Skan velocity profiles for several values of β
Separation
Before we go through to the analysis of the result, we should discuss first the
principle of separation. Separation will arise when there is an existence of a reversed
flow meets the forward flow at a point. The reversed flow exists due to a large of
pressure in the direction of flow. The increment in the pressure can happen when
there is an existence of positive pressure gradient, i.e. dp / dx > 0 . The distribution
in dp / dx
occur due to the relation of the Bernoulli equation, that is
67
dp / dx = − ρU (dU / dx) where U(x) is the free stream velocity. Hence, if we reach at
a point when dp / dx > 0 and create in a large of pressure value, it possibly can cause
the separation phenomenon. Therefore, when the reversed flow meets the forward
flow at a separation point S, the fluid adjacent to the surface will transported out into
the mainstream as shown in Figure 4.8 (the dashed line represent u = 0 ). We say
that the flow separates from the wall, which results in vanishing of the wall shear
stress. Since the wall shear stress is given by (3.19), i.e. τ w = µ(∂u / ∂y ) y =0 , therefore
the separation occurs when τ w = 0 , or
⎛ ∂u ⎞
⎜⎜ ⎟⎟ = 0 .
⎝ ∂y ⎠ y =0
(4.36)
u
Forward
streamline
S
u=0
Backward
streamline
Figure 4.8
Streamlines and velocity profiles near a separation point S past an
arbitrary wall (Kundu and Cohen, 2004)
The separation point is significant because beyond it the basic underlying
assumption of the boundary layer become invalid (Kundu and Cohen, 2004). In
68
other words, in seeking the solution of boundary layer equations, we should not go
further when we reach at a separation point. From (4.34a), we get
∂u U ( x)
=
f ′′(η ) .
∂y g ( x)
Hence, from (4.36) we can also state that (in the terms of similarity variables) the
separation occurs when f ′′(0) = 0 .
(ii)
Analysis of Result
Even though we are considering a flow past a wedge which gives the range of
0 < m < 1 (or 0 < β < 1 ), it does not mean that solutions of the Falkner-Skan
equation may not exist for m < 0 or m > 1 . Such solutions have been found by
Hartree in 1937 (Walz, 1969). It is obvious that for m = 0 (or β = 0 ), the FalknerSkan equation (4.32) reduces to the Blasius equation (4.16) for flow past a horizontal
flat plate.
For 0 < m < 1 , it represents wedge geometry. Further, since U ( x) = x m and
from the Bernoulli equation (2.7), dp / dx = −U (dU / dx) , it follows that
dp
= − mx 2 m −1
dx
i.e. dp / dx < 0 for m > 0 .
(4.37)
Because m increases monotonically in the range
0 < m < 1 , it follows that the magnitude of the pressure gradient increases (with
negative value) as the wedge angle increases. This means that the pressure decreases
in the direction of motion, and this tends to accelerate the fluid in the boundary layer.
We say that the pressure gradient is “favorable” (Kundu and Cohen, 2004).
The case of m = 1 (or β = 1 ) deserves special attention. In this case, the
geometry reduces to flow directly toward a perpendicular flat plate as shown in
69
Figure 4.9. The resulting motion is known as the two-dimensional stagnation flow.
Since m = 1 , we have U ( x) = x , and from (4.31) the similarity transformation reads
ψ = xf ( y )
,
η=y
where
u=x
,
v = −y
and the Falkner-Skan equation for m = 1 ( β = 1 ) reduces to the Hiemenz stagnation
point flow equation established in 1911
f ′′′ + ff ′′ + 1 − f ′ 2 = 0 ,
subject to the boundary conditions (4.33).
u
v
x
U ( x) = x
y
Figure 4.9
Flow in the neighborhood of the stagnation point
70
However, for m > 1 , it has been pointed out by Hartree that these solutions do
not lead to real values of the velocity components u and v, and thus they have no any
physical significance or interest.
On the other hand, Hartree obtained a family of solutions for the case of
m < 0 (or β < 0 ) which corresponds to flows past convex corners. However, when
m = −0.0904 ( β = −0.1988 ), it gives f ′′(0) = 0 and separation is imminent all along
the surface. Therefore, the solutions for m < −0.0904 do not represent boundary
layers anymore. Further, we notice from (4.37) that dp / dx > 0 for m < 0 . This
means that the pressure increases in the direction of motion, and this tends to
decelerate the fluid in the boundary layer. A pressure gradient acting in this sense is
known as an “adverse” pressure gradient (Kundu and Cohen, 2004).
(iii)
Boundary Layer Thickness and Skin Friction
As in the previous case, the boundary layer thickness δ is taken as equal to
the value of y component when u reaches as 99 percent of U∞. From Figure 4.7, it is
found that u = 0.99U ∞ at η = 3.48 for β = 0 , η = 2.76 for β = 0.5 , η = 2.38 for
β = 1 , and η = 1.86 for β = 2 . Then we may rewrite (4.24) and replace the value of
η in the equation with these values. For example for β = 1 , the boundary layer
thickness is
δ
x
= 2.38 Re −x1 / 2 .
β =1
There is no different in calculating the skin friction coefficient in the present
and previous cases. From (4.27), the skin friction coefficient can be rewritten as
C fx = 2 f ′′(0; β ) Re −x 1 / 2
(4.38)
where the values of f ′′(0; β ) for different sets of β are presented in Table 4.4.
CHAPTER 5
TEMPERATURE BOUNDARY LAYER PAST A HORIZONTAL
FLAT PLATE AND A SEMI-INFINITE WEDGE
5.1
Introduction
In this chapter we will solve the temperature boundary layer equation that we
have obtained in Chapter 3 for the cases of steady laminar flow past a horizontal flat
plate and a semi-infinite wedge.
Section 5.2 describes the physical model of
temperature boundary layer past an arbitrary surface.
Section 5.3 contains the
explanation the nondimensionalization of the temperature boundary layer equation.
Then the dimensionless temperature boundary layer equation will be transformed to
another equation using similarity transformation. We will consider two problems of
heat transfer from the surface to the flow, namely the problems of constant wall
temperature and constant wall heat flux. The solutions of the temperature boundary
layer equation for flow past a horizontal flat plate and a semi-infinite wedge will be
obtained in Section 5.4 and 5.5 respectively. Section 5.4 and 5.5 also contain the
results which will view on the temperature profiles and heat transfer coefficient.
72
5.2
Physical Model of Temperature Boundary Layer
Figure 5.1 shows the relation between velocity and temperature boundary
layers for a flow past an arbitrary surface, which can be referred to both cases of flow
past a horizontal flat plate and a semi-infinite wedge. The thickness of the thermal
boundary layer is designated as δ T . We assume that the temperature of the wall Tw
or the wall heat flux q w are constants, and Tw is higher than the constant temperature
of the ambient fluid T∞ .
To simplify the analysis, we also assume that (Holman, 2002):
1. The fluid is incompressible and the flow is steady
2. The viscosity, thermal conductivity, and specific heat are constants
3. Heat conduction in the direction of flow (x-direction) is negligible
T∞
U∞
u
δT
δ
T
Tw
qw
Figure 5.1
Comparison between velocity and temperature boundary layers
on an arbitrary wall
73
5.3
Nondimensionalization of Variables
From Chapter 3, we have obtained the dimensional energy equation for the
steady state flow in the form of
∂T
∂T
∂ 2T
u
+v
=α
∂x
∂y
∂y 2
(5.1)
(the sign “¯” denotes the dimensional variable) subject to the boundary conditions
(i) T = Tw
or (ii)
q
∂T
=− w
∂y
k
on
y = 0, x > 0
T = T∞
as
y → ∞, x > 0
T = T∞
at
x =0
(5.2)
where the numberings (i) and (ii) indicate for the cases of constant wall temperature
and constant wall heat flux respectively, and k is thermal conductivity.
Further, we apply the same nondimensional variables as in the preceding
chapter with an additional nondimensional variable for temperature:
x=
x
L
y = Re1 / 2
y
L
(5.3)
u=
where
u
U∞
∆T = (Tw − T∞ )
v = Re1 / 2
for
the
case
v
U∞
of
θ=
constant
T − T∞
.
∆T
wall
temperature
∆T = Re −1/ 2 (qw L / k ) for the case of constant wall heat flux, respectively.
and
74
Substituting the nondimensional variables (5.3) into (5.1) yields
u
∂θ 1 ∂ 2θ
∂θ
=
+v
∂y Pr ∂y 2
∂x
(5.4)
since we have the relation Pr = υ / α from (3.14), while the boundary conditions
(5.2) become
(i) θ = 1 or (ii)
∂θ
= −1 at
∂y
y = 0, x > 0
θ = 0 as y → ∞, x > 0
(5.5)
θ = 0 at x = 0, y > 0 .
By exploiting the stream function ψ where
u=
∂ψ
∂y
,
v=−
∂ψ
∂x
and substituting it into (5.4) we get the dimensionless temperature boundary layer
equation in the form of stream function:
∂ψ ∂θ ∂ψ ∂θ
1 ∂2 θ
.
=
−
∂y ∂x ∂x ∂y Pr ∂y 2
(5.6)
Equation (5.6) will be solved correspond to the case of flow past a horizontal flat
plate and a semi-infinite wedge.
75
5.4
Solution of the Temperature Boundary Layer Equation for Flow Past a
Horizontal Flat Plate
Now we want to seek the solution of the temperature boundary layer equation
for the case of flow past a horizontal flat plate. Starting with equation (5.6), we will
transform it using similarity transformation.
This will result a linear ordinary
differential equation, therefore it can be solved by integrating it numerically.
5.4.1
Similarity Transformation
Since we are working out in the case of flow past a horizontal flat plate, we
can apply the same similarity variable (4.10) which has been used in finding the
velocity boundary layer equation in the previous chapter, i.e.
ψ = g ( x) f (η )
,
η=
y
.
g ( x)
Then we find the following derivatives:
∂ψ
= g ′( f − f ′η )
∂x
∂θ
g′
= − θ ′η
∂x
g
∂ψ
= f′
∂y
∂θ θ ′
=
∂y g
∂ 2θ θ ′′
=
∂y 2 g 2
and substituting all these expressions into (5.6) yields
⎛ g′
⎞
θ ′ 1 θ ′′
f ′⎜⎜ − θ ′η ⎟⎟ − g ′( f − f ′η ) =
g Pr g 2
⎝ g
⎠
76
which eventually becomes
θ ′′ + gg ′ Pr fθ ′ = 0 .
If we set gg ′ = 1 / 2 as we did in Chapter 4, we obtain
θ ′′ +
Pr
fθ ′ = 0
2
(5.7)
subject to the boundary conditions
θ (0) = 1 or θ ′(0) = −1
5.4.2
,
θ (∞ ) = 0 .
(5.8)
Solution of the Transformed Temperature Boundary Layer Equation
Equation (5.7) is a linear differential equation where the function f (η) is the
solution of the Blasius equation (4.14) which has been obtained in Chapter 4.
Integrating (5.7), we get
η
⎛ 1
⎞
θ ′(η) = A exp⎜ − Pr ∫ f dη ⎟
0
⎝ 2
⎠
and further we obtain
η
η
⎛ 1
⎞
θ (η) = A∫ exp⎜ − Pr ∫ f dη ⎟ dη + B
0
0
⎝ 2
⎠
where A and B are constants of integration. We can find A and B using the boundary
conditions (5.8). Therefore, we get
77
η
⎞
⎛ 1
exp⎜ − Pr ∫ f dη ⎟ dη
0
0
⎠
⎝ 2
θ ( η) = 1 −
∞
η
⎛ 1
⎞
∫0 exp⎜⎝ − 2 Pr ∫0 f dη ⎟⎠dη
∫
η
(5.9)
for the constant wall temperature case, i.e. θ (0) = 1 , and
∞
η
η
η
⎛ 1
⎞
⎛ 1
⎞
θ (η) = ∫ exp⎜ − Pr ∫ f dη ⎟dη − ∫ exp⎜ − Pr ∫ f dη ⎟ dη
0
0
0
0
⎝ 2
⎠
⎝ 2
⎠
(5.10)
for the constant wall heat flux case, i.e. θ ′(0) = −1 , respectively.
From the Blasius equation (4.14) we get the relation f = −2 f ′′′ / f ′′ , so we
can write
η
η f ′′′
⎛ f ′′(η) ⎞
1
⎟⎟ .
− Pr ∫ f dη = Pr ∫
dη = Pr ln⎜⎜
0
0
2
f ′′
⎝ f ′′(0) ⎠
Hence, equations (5.9) and (5.10) respectively become
∫ ( f ′′)
θ ( η) = 1 −
∫ ( f ′′)
η
Pr
0
∞
dη
Pr
dη
0
(5.11)
for the case of constant wall temperature and
∞
( f ′′)Pr dη − ∫0 ( f ′′)Pr dη
∫
0
θ ( η) =
η
[ f ′′(0)]Pr
(5.12)
for the case of constant wall heat flux. The solutions of these equations are obtained
by integrating them numerically.
78
5.4.3
Result and Analysis
Here we will present the result from the solution of the equations (5.11) and
(5.12), followed by the analysis of the result which is view on the temperature
profiles and Nusselt number.
(i)
Result
The temperature function θ (η) for both cases of constant wall temperature
and constant wall heat flux, can be obtained since f ′′(η) is given from the solution
of the Blasius equation (4.14). Equation (5.7) subject to conditions (5.8) is solved
using Mathematica programming (see Appendix C).
The profiles of θ (η) for
Pr = 0.72 (air), 1, 3, 6.8 (water at 20°C) and 15 for both cases of constant wall
temperature and constant wall heat flux are shown in Figure 5.2(a) and 5.2(b)
respectively.
(ii)
The Nusselt Number
In Chapter 3 under Section 3.5, the correlation of Nusselt number has been
given in (3.18). From (3.18), the local Nusselt number is
⎧− θ ′(0) Re1x/ 2 , for constant wall temperature
⎪
Nu x = ⎨ 1
Re1 / 2 ,
for constant wall heat flux
⎪⎩ θ (0) x
(5.13)
where
θ ′(0) = −
[ f ′′(0)]Pr
∞
Pr
∫0 ( f ′′) dη
(5.14)
79
θ (η )
1
0.8
0.6
Pr = 0.72
1
0.4
3
0.2
6.8
15
η
1
2
3
4
5
6
4
5
6
(a)
θ (η )
3
2.5
2
Pr = 0.72
1.5
1
1
0.5
3
6.8
15
1
2
3
η
(b)
Figure 5.2
Profiles of θ (η) for several values of Pr : (a) case of constant wall
temperature; (b) case of constant wall heat flux
80
for the constant wall temperature case, and
∞
∫ ( f ′′)
θ (0) =
Pr
0
dη
(5.15)
[ f ′′(0)]Pr
for the case of constant wall heat flux case, respectively. The values of − θ ′(0) and
θ (0) for several values of Pr are given in Table 5.1.
E. Pohlhausen in 1921 has shown that the function θ ′(0) = g (Pr) given by
(5.14) is well approximated by
θ ′(0) = −0.332 Pr 1 / 3
for
Pr > 0.5 .
Then the local Nusselt number (5.13) gives
Nu x = 0.332 Pr 1 / 3 Re1x/ 2
for
Pr > 0.5 .
(Incropera and DeWitt, 1985; Kreith and Bohn, 1997).
A different correlation must be used below Pr < 0.5 or, if the Prandtl number
of a particular liquid metal, which is small ( Pr → 0) , is given. We notice from
Figure 5.1 that for Pr << 1 , the velocity boundary layer is much thinner than the
thermal boundary layer (δ << δ T ) . Therefore, we can assume the flow of the free
stream velocity, i.e. we can take the limit f ′ → 1 in the region occupied by the
thermal boundary layer profiles θ (η) . Differentiating equation (5.7) once, it can be
written as
d ⎛ θ'' ⎞
Pr
⎜⎜ ' ⎟⎟ = −
f′
dη ⎝ θ ⎠
2
81
Table 5.1 : Values of − θ ′(0) for constant wall temperature and θ (0) for constant
wall heat flux, for several values of Pr
− θ ′(0)
θ (0)
(constant wall temperature)
(constant wall heat flux)
0.72
0.29564
3.38255
1
0.33206
3.01153
3
0.48505
2.06165
6.8
0.63965
1.56335
10
0.72814
1.37336
15
0.83412
1.19887
Pr
If we now take f ′ → 1 here and integrate it twice, we get
ln θ ′(η ) =
Pr 2
η +k
4
or
θ ′(η ) = Ce
−
Pr 2
η
4
where k and C are constants of integration. Integrating the last equation yields
η
θ (η ) = C ∫ e
Pr
− λ2
4
0
η
dλ + B = C ∫ e
⎛ Pr1 / 2 ⎞
λ ⎟⎟
−⎜
⎜ 2
⎠
⎝
2
0
dλ + B .
If we substitute σ = Pr 1 / 2 λ / 2 , the last equation can be expressed in the form of
error function erf, i.e.
Pr1/ 2 η / 2
2
2
C
e −σ d σ + B
1/ 2
∫
0
Pr
⎛ Pr1/ 2 ⎞
= A erf ⎜
η⎟+ B
⎝ 2
⎠
θ (η ) =
82
where A and B are constants, which can be found from boundary conditions (5.8).
The error function erf is defined as
2
erf ( z ) =
π
∫
z
0
e −σ dσ
2
where the values of erf(z) can be referred in the error function table (see
Appendix E). Hence, from the boundary conditions (5.8), it results
⎛ Pr 1 / 2 ⎞
θ (η) = 1 − erf ⎜⎜
η ⎟⎟
⎠
⎝ 2
,
Pr → 0
(5.16)
,
Pr → 0
(5.17)
when θ (0) = 1 (constant wall temperature case) and
θ ( η) =
π ⎡
⎛ Pr 1 / 2
⎜⎜
1
−
erf
⎢
Pr ⎣
⎝ 2
⎞⎤
η ⎟⎟⎥
⎠⎦
when θ ′(0) = −1 (constant wall heat flux case).
Therefore, from (5.16) we get
θ ′(0) = −
Pr
π
= −0.564 Pr 1 / 2
and from (5.17) we get
θ ( 0) =
π
Pr
= 1.772 Pr 1 / 2
and we complete the expression of local Nusselt number in (5.13).
Furthermore, the average Nusselt number formula for the constant wall
temperature case is
83
Nu =
1 L
Nu x dx = 1.128 Pr 1 / 2 Re1 / 2
L ∫0
as
Pr → 0 .
However, for the constant wall heat flux case, the average Nusselt number is given
by
⎡
⎤L
qw
1
Nu = ⎢
Re1 / 2 .
⎥ =
T
(
x
)
−
T
k
θ
(
0
)
∞ ⎦
⎣ w
Thus, using θ (0) = π / Pr as Pr → 0 we have
Nu = 0.564 Pr 1 / 2 Re1 / 2 as
5.5
Pr → 0 .
Solution of Temperature Boundary Equation for Flow Past a Semi-
infinite Wedge
Here we want to solve the temperature boundary layer equation for the case
of flow past a semi-infinite wedge. We will follow the same process in the preceding
section, i.e. starting with the similarity transformation of equation (5.6).
5.5.1
Similarity Transformation
We can apply the same similarity variable (4.28) which has been used in
finding the velocity boundary layer equation in the previous chapter since we are
working out in the case of flow past a semi-infinite wedge, i.e.
84
ψ = F ( x) f (η )
η=
,
y
.
g (x)
Then we get
∂ψ
Fg ′
= F ′f −
f ′η
∂x
g
∂θ
g′
= − θ ′η
∂x
g
∂ψ Ff ′
=
∂y
g
∂θ θ ′
=
∂y g
∂ 2θ θ ′′
=
∂y 2 g 2
and substituting all these expressions into (5.6) yields
⎞ θ ′ 1 θ ′′
⎞ ⎛
Ff ′ ⎛ g ′
Fg ′
′ ⎟⎟ =
⎜⎜ − θ ′η ⎟⎟ − ⎜⎜ F ′f −
fη
2
g ⎝ g
g
⎠ g Pr g
⎠ ⎝
which finally becomes
θ ′′ + F ′g Pr fθ ′ = 0 .
From (4.30), we get F ′( x) = 1 / g ( x) which make the last equation as
θ ' ' + Pr fθ ' = 0
(5.18)
subject to boundary condition
θ (0) = 1 or θ ′(0) = −1
,
θ (∞ ) = 0 .
(5.19)
85
5.5.2
Solutions of the Transformed Thermal Boundary Layer Equation
Now we want to seek the solution of equation (5.18) subject to the boundary
conditions (5.19). However we should notice that equation (5.18) is similar with
(5.7) including the boundary conditions, except for the coefficient of the second term
in the left-hand-side; i.e. Pr/2 for (5.7) and Pr for (5.18). Therefore we can obtain the
solution of (5.18) simply by replacing Pr/2 with Pr in the equations (5.9) and (5.10)
i.e.
⎛⎜ − Pr η f dη ⎞⎟ dη
exp
∫0
∫0
⎠
θ ( η) = 1 − ∞ ⎝
η
∫0 exp⎛⎜⎝ − Pr ∫0 f dη ⎞⎟⎠dη
η
(5.20)
for the constant wall temperature case, i.e. θ (0) = 1 , and
∞
η
η
η
θ (η) = ∫ exp⎛⎜ − Pr ∫ f dη ⎞⎟dη − ∫ exp⎛⎜ − Pr ∫ f dη ⎞⎟ dη
0
0
0
0
⎝
⎠
⎝
⎠
(5.21)
for the constant wall heat flux case, i.e. θ ′(0) = −1 , respectively. Here, the function
f (η ) is the solution of the Falkner-Skan equation (4.32).
5.5.3
Result and Analysis
In this section we will present the result from the solution of equation (5.18)
subject to conditions (5.19), followed by the analysis of the result.
86
(i)
Result
The finding of θ (η) in the case of flow past a semi-infinite wedge compare
to the case of flow past a horizontal flat plate is more complicated due to the
presence of parameter β. Equation (5.18) subject to conditions (5.19) is solved using
Mathematica programming (see Appendix D).
The temperature profiles when
β = 0.5 are plotted for several values of Pr, i.e. 0.72 (air), 1, 3 and 6.8 (water at
20°C) and β = 1 (see Figure 5.3). To observe the variation of temperature in β, we
fixed the value of Pr = 0.72 and plotted the profiles for several values of β, i.e.
–0.199 (separation), 0 (Blasius flow), 0.5 and 1 (see Figure 5.4 ).
(ii)
The Nusselt Number
The Nusselt number for the case of flow past a semi-infinite wedge is similar
with the preceding case. Therefore we can rewrite (5.13) as
⎧− θ ′(0; β ) Re1x/ 2 ,
constant wall temperature
⎪
1
Nu x = ⎨
Re1 / 2 , case of constant wall heat flux
⎪⎩ θ (0; β ) x
where
θ ′ (0) = −
1
∫
∞
0
η
exp⎛⎜ − Pr ∫ f dη ⎞⎟dη
0
⎠
⎝
for the constant wall temperature case, and
∞
η
θ (0) = ∫ exp⎛⎜ − Pr ∫ f dη ⎞⎟dη
0
0
⎠
⎝
(5.22)
87
for the case of constant wall heat flux case, respectively. The values of θ ′(0; β ) and
θ (0; β ) for different sets of β (or m), are presented in Tables 5.3 and 5.4
respectively.
Remark, there is another way to find the values of θ ′(0; β ) and θ (0; β )
instead of analyze it from the graph. Since the value f ′′(0; β ) of Falkner-Skan
equation has been obtained via perturbation method in the Section 4.6.2 of the
previous chapter, it is reasonable to seek the value θ ′(0; β ) and θ (0; β ) for each case
with the same approach.
For example, Aziz and Na (1984) give the perturbation series of θ ′(0) for
Pr = 0.72 (air) until tenth-order as
∞
− θ ′(0; β ) = ∑ β nθ n′ (0)
n =0
= 0.4181 + 0.2119 β − 0.4344 β 2 + 1.2100 β 3 − 3.9425β 4
+ 14.0958β 5 − 53.7669β 6 + 213.8442 β 7 − 877.9190β 8
+ 3692.5437 β 9 − 15829.9031β 10 .
(5.23)
We follow the same step in finding f ′′(0) , and then apply the Shanks transformation
to obtain the value of θ ′(0; β ) .
For example, the calculation of θ ′(0;1) when
Pr = 0.72 is presented in Table 5.2, which results θ ′(0;1) = −0.498712 . Then we
can repeat the same process to obtain the value θ ′(0; β ) for different set of β and Pr.
It is worth mentioning that in many problems, particularly those involving the
cooling of electrical and nuclear components, the wall heat flux q w is known. In
such problems, overheating, burnout, and meltdown are very important issues,
therefore, the objective of heat transfer analysis is the prediction of the wall
temperature variation Tw (x) . The design objective is to control this temperature;
hence, the heat transfer problem is to find the transfer coefficient or the Nusselt
number.
88
θ (η )
1
0.8
0.6
Pr = 0.72
1
0.4
3
6.8
15
0.2
η
1
2
3
4
(a)
θ (η )
2
1.5
Pr = 0.72
1
1
0.5
3
6.8
15
η
1
2
3
4
(b)
Figure 5.3
Profiles of θ (η) when β = 0.5 for several values of Pr :
(a) case of constant wall temperature; (b) case of constant wall heat flux
89
θ (η )
1
0.8
0.6
β = −0.199
β =0
β = 0.5
0.4
β =1
0.2
η
1
2
3
4
5
4
5
(a)
θ (η )
3
2.5
β = −0.199
2
β =0
1.5
1
β = 0.5
β =1
0.5
1
2
3
η
(b)
Figure 5.4
Profiles of θ (η) when Pr = 0.72 for several values of β :
(a) case of constant wall temperature; (b) case of constant wall heat flux
90
Table 5.2 : Iterated application of Shanks transformation to the series (5.23), as β = 1
and Pr = 0.72
n
Sn
0
1
2
3
4
5
6
7
8
9
10
e1
0.4181
0.6300
0.1956
1.4056
–2.5369
11.5589
–42.208
171.636
–706.283
2986.26
–12843.6
0.487575
0.515245
0.479753
0.543916
0.390947
0.76536
–0.32223
3.00081
–7.8622
e12
e13
0.499697
0.502605
0.498714
0.498777
0.483417
0.492059
0.456181
0.50094
0.498776
0.498714
0.488947
0.485094
e14
e15
0.498712
0.498776 0.498712
0.498712
Table 5.3 : Values of − θ ′(0; β ) for constant wall temperature case for several
values of β (or m) and Pr
− θ ′(0; β )
β
m
(constant wall temperature)
Pr
0.72
1
3
6.8
15
0
0
0.41810
0.46960
0.68596
0.90461
1.17962
0.3
3/17
0.45956
0.51952
0.77344
1.03134
1.35621
0.5
1/3
0.47562
0.53898
0.80809
1.08191
1.42699
0.6667
1/2
0.48587
0.55145
0.83055
1.11488
1.47330
1
1
0.50144
0.57047
0.86522
1.16615
1.54570
91
Table 5.4 : Values of θ (0; β ) for constant wall heat flux case for several values of
β (or m) and Pr
θ (0; β )
β
m
(constant wall heat flux)
Pr
0.72
1
3
6.8
15
0
0
2.39176
2.12947
1.45781
1.10545
0.84773
0.3
3/17
2.17602
1.92486
1.29293
0.96962
0.73735
0.5
1/3
2.10253
1.85536
1.23749
0.92429
0.70078
0.6667
1/2
2.05815
1.81339
1.20403
0.89696
0.67875
1
1
1.99427
1.75295
1.15577
0.85752
0.64695
CHAPTER 6
CONCLUSION
6.1
Summary of Research
This chapter contains an overview of the study as well as suggestions for
future research. The investigation considered in this dissertation is focused on the
mathematical models of velocity and temperature boundary layers for the case of
flow past a horizontal flat plate and a semi-infinite wedge in forced convection.
The objectives and scope, and historical background are presented in
Chapter 1.
Chapter 2 contains the discussion of the velocity boundary layer
equations. In this chapter, we have derived the velocity boundary layer equations.
Also, we have discussed the concept of boundary layer thickness and the Reynolds
number. In view of solving the velocity boundary layer equations for particular
cases of flows, we have provided the dimensionless form of the equations. The
description on the selection of the boundary conditions has also been stated in this
chapter.
Chapter 3 contains the discussion of the temperature boundary layer
equation. We have obtained the derivation of the thermal boundary layer equation
and discussed the concept of the temperature boundary layer thickness and the
93
Prandtl number. The heat transfer coefficient and the Nusselt number which both
correspond to heat transfer rate have also been discussed. Further, this chapter also
describes the relation between fluid friction and heat transfer.
The explanation of the models of velocity and thermal boundary layers for
steady laminar flows past a horizontal flat plate and semi-infinite wedge have been
established in Chapter 4 and Chapter 5 respectively. Starting with the boundary
layer equations which have been obtained in Chapter 2, we have transformed them
via similarity transformation which resulted in a single ordinary differential equation,
namely the Blasius equation for flow past a horizontal flat plate, and the FalknerSkan equation for flow past a semi-infinite wedge. We have solved the Blasius
equation using series expansion, namely the Blasius series, and applied the
perturbation method in solving the Falkner-Skan equation.
Finally, we have
analyzed the result of Blasius equation and Falkner-Skan equation which includes the
velocity profiles and the skin friction coefficient.
Chapter 5 consists of the explanation of the models of the temperature
boundary layer. In this chapter we applied the temperature boundary layer equation
that we have obtained in Chapter 3 to the problem of flow past a horizontal flat plate
and a semi-infinite wedge. In this chapter, we first described the physical models of
thermal boundary layer past the bodies, and then we derived the dimensionless
thermal boundary layer equation. Using similarity transformation technique, the
dimensionless thermal boundary layer equation has been transformed to a linear
ordinary differential equation. Since the equation is linear, we have obtained the
solution of the transformed thermal boundary layer equation by integrated it
numerically for each case of flow. For each case of flow past the bodies, we have
considered the problem of constant wall temperature and constant wall heat flux.
Finally, in this chapter we have analyzed the result which includes the temperature
profiles and the Nusselt number.
94
6.2
Suggestions for Future Research
The work presented in this dissertation suggests several future areas of study
especially the methods in solving both velocity and thermal boundary layer
equations. In this study, we have used the method of series approximation to solve
the Blasius equation and perturbation technique to solve the Falkner-Skan equation.
Then we have gathered the values of (∂u / ∂y ) y =0 and (∂θ / ∂y ) y =0 which correspond
to the skin friction and local heat transfer respectively. However, we might think a
method which can provide a rapid and relatively accurate estimation of (∂u / ∂y ) y =0
and (∂θ / ∂y ) y =0 , without requiring the complete solution of the boundary layer
equations. One of the way is using the integral method, which can be used since the
boundary layer equations are not satisfied everywhere in the field, but only in the
integral forms across the thickness of the boundary layer (see Kreith and Bohn 1997;
Knudsen and Katz, 1979).
In view of using perturbation series, the technique to improve it might be
varied. Apart from using Shanks transformation to improve the perturbation series,
we may use others techniques such as the Euler transformation, the extraction of
singularity, the revision of series and the Padé approximants (see Aziz and Na, 1984;
Van Dyke, 1975).
Moreover, another way of solution under perturbation method which might
be used is the matched asymptotic expansion technique. As stated in Chapter 2
under section 2.2, the complete approximate solution of the governing equations is
built up from two parts of solutions valid in different regions, i.e. the outer and inner
regions. Hence, we may find the solution in every region and match them to find out
the composite solution (see Shivamoggi, 1998; Nayfeh, 1993).
REFERENCES
Acheson, D. J. (1992). Fluid Mechanics. London: Oxford University Press.
Arpaci, V. S. and Larsen P. S. (1984). Convection Heat Transfer. New Jersey:
Prentice-Hall, Inc.
Aziz, A. and Na, T. Y. (1981). New Approach to the Solution of Falkner-Skan
Equation. AIAA Journal. 19(9): 1242-1244.
Aziz, A. and Na, T. Y. (1984). Perturbation Methods In Heat Transfer. New York:
Hemisphere Publishing Corp.
Batchelor, G. K. (2000). An Introduction to Fluid Dynamics. Cambridge: Cambridge
University Press.
Bejan, A. (1984). Convection Heat Transfer. Toronto: John Wiley & Sons, Inc.
Bejan, A. (1993). Heat Transfer. New York: John Wiley & Sons, Inc.
Bender, C. M. and Orszag, A. O. (1978). Advanced Mathematical Methods for
Scientists and Engineers. New York: McGraw-Hill Book Co.
Cebeci, T. and Keller, H. B. (1971). Shooting and Parallel Shooting Methods for
Solving the Falkner-Skan Boundary Layer Equation. Journal of
Computational Physics. 7: 289-300.
96
Chorin, A. J. and Marsden, J. E. (1993). A Mathematical Introduction to Fluid
Mechanics. New York: Springer-Verlag New York, Inc.
Currie, I. G. (1993). Fundamental Mechanics of Fluids. New York: Mc Graw-Hill,
Inc.
Ducan, W.J., Thom, A.S. and Young, A.D. (1970) Mechanics of Fluids. London:
Edward Arnold Ltd.
Eckert, E. R. G. and Drake Jr., R. M. (1987). Analysis of Heat and Mass Transfer.
New York: Hemisphere Publishing Corp.
Edwards, D. K., Denny, V. E. and Mills, A. F. (1976). Transfer Processes.
Washington: Hemisphere Publishing Corp.
Evans, H. L. (1968). Laminar Boundary Layer Theory. Boston: Addison-Wesley
Publishing Co., Inc.
Goldstein, S. (1938). Modern Developments in Fluid Dynamics. London: Oxford
University Press.
Henrici, P. (1974). Applied and Computational Complex Analysis. Volume I.
Toronto: John Wiley & Sons, Inc.
Holman, J. P. (1992). Heat Transfer. United Kingdom: McGraw-Hill International
(UK) Ltd.
Holman, J. P. (2002). Heat Transfer. New York: McGraw-Hill International Ltd.
Howarth, L. (1938). On the Solution of the Laminar Boundary Layer Equations.
Proceedings of the Royal Society of London. A164: 547-558.
Incropera, F. P. and DeWitt, D. P. (1981). Fundamentals of Heat Transfer. Toronto:
John Wiley & Sons, Inc.
97
Incropera, F. P. and DeWitt, D. P. (1985). Introduction to Heat Transfer. Toronto:
John Wiley & Sons, Inc.
Kakac, S. (1980). Convective Heat Transfer. Ankara: METU Press.
Knudsen, J. G. and Katz, D. L. (1979). Fluid Dynamics and Heat Transfer. New
York: Robert E. Krieger Publishing Co. Inc.
Kreider, J. F. (1985). Principles of Fluid Mechanics. Boston: Allyn and Bacon, Inc.
Kreith, F. and Bohn, M. S. (1997). Principles of Heat Transfer. Boston: PWS
Publishing Co.
Kundu, P. K. (1990). Fluid Mechanics. San Diego: Academic Press Inc.
Kundu, P. K. and Cohen, I. M. (2004). Fluid Mechanics. San Diego: Elsevien
Academic Press.
Ligget, J. A. (1994). Fluid Mechanics. New York: McGraw-Hill, Inc.
Muneer, T., Kubie, J. and Grassie, T. (2003). Heat Transfer: A Problem Solving
Approach. London: Taylor & Francis Group.
Na, T. Y. (1979). Computational Methods In Engineering Boundary Value Problem.
New York: Academic Publishing Co.
Nayfeh, A. H. (1973). Perturbation Methods. New York: Wiley-Interscience.
Nayfeh, A. H. (1993). Introduction to Perturbation Techniques. New York: John
Wiley & Sons, Inc.
Parker, J. D., Boggs, J. H. and Blick, E. F. (1969). Introduction to Fluid Mechanics
and Heat Transfer. London: Addison-Wesley Publishing Co.
98
Paterson, A. R. (1983). A First Course In Fluid Dynamics. Cambridge: Cambridge
University Press.
Schlichting, H. (1979). Boundary Layer Theory. New York: McGraw-Hill, Inc.
Shames, I. H. (1962). Mechanics Of Fluids. New York: McGraw-Hill Book Co., Inc.
Shivamoggi, B. K. (1998). Theoretical Fluid Dynamics. Toronto: John Wiley &
Sons, Inc.
Stewartson, K. (1964). The Theory of Laminar Boundary Layers in Incompressible
Fluids. London: Oxford University Press.
Street, R. L., Watters, G. Z. and Vennard, J. K. (1996). Elementary Fluid Mechanics.
New York: John Wiley & Sons.
Triton, D. J. (1985). Physical Fluid Dynamics. Berkshire: Van Nostrand Reinhold
Co. Ltd.
Van Dyke, M. (1974). Analysis and Improvement of Perturbation Series. Quarterly
Journal of Mechanics and Applied Mathematics. 27: 423-450.
Van Dyke, M. (1975). Perturbation Methods In Fluid Mechanics. California:
The Parabolic Press.
Vennard, J. K. (1982). Elementary Fluid Mechanics. New York: John Wiley & Sons,
Inc.
Walz, A. (1969). Boundary Layers Flow and Temperature. Massachusetts:
The M.I.T. Press.
White, F. M. (1991). Viscous Fluid Flow. United Kingdom: McGraw-Hill
International (UK) Ltd.
APPENDICES
100
APPENDIX A
C++ Programming for Calculating the Solution of the Blasius Equation from
the Blasius Series
// Solution of Blasius equation (4.14) via Blasius series
// Blasius equation: f’’’+(1/2)ff’’=0
#include <iostream.h>
#include <math.h>
#define N 10000
#define A 0.332057
typedef struct
{
int c;
double d;
}calc;
calc Fac(calc a)
{
calc ans,p;
int i;
p.d=1;
if(a.d==0)
ans.d=1;
else
{
for(i=1;i<=a.d;i++)
p.d=p.d*i;
ans.d=p.d;
}
return(ans);
}
calc Comb(calc a,calc b)
{
calc ans,n,r,p,q;
n.d=1; r.d=1; q.d=1;
if(b.d==0)
ans.d=1;
else
{
p.d=a.d-b.d;
n=Fac(a); r=Fac(b); q=Fac(p);
ans.d=n.d/(r.d*q.d);
}
return(ans);
}
calc FindC(calc n)
{
calc ans,C[N+1],t,p,q;
t.d=0;
int k,i;
C[0].d=1;
101
for(k=1;k<=n.c;k++)
{
C[k].d=0;
for(i=0;i<=k-1;i++)
{
p.d=(double)3*k-1;
q.d=(double)3*i;
t=Comb(p,q);
C[k].d+=C[i].d*C[k-i-1].d*t.d;
}
}
ans.d=C[n.c].d;
return (ans);
}
void main()
{
calc n,w[N+1],i,j,k,u,p,r;
i.d=0; j.d=0; k.d=0; u.d=0; p.d=0; r.d=0; w[N+1].d=0;
cout << "Result" << endl << endl;
for(n.c=0;n.c<=50;n.c++)
w[n.c]=FindC(n);
double v=0,q=0,s=0,e,eta,Sum;
Sum=0;
for(e=0;e<=5;e+=0.1)
{
double f=0,g=0,h=0;
for(n.c=0;n.c<=55;n.c++)
{
i.d=(double)3*n.c+2; j.d=(double)3*n.c+1;
k.d=(double)3*n.c;
u=Fac(i); p=Fac(j); r=Fac(k);
v=1/u.d; q=1/p.d; s=1/r.d;
f+=pow(0.5,n.c)*pow(A,n.c+1)*v*w[n.c].d*pow(e,i.d;
g+=pow(0.5,n.c)*pow(A,n.c+1)*q*w[n.c].d*pow(e,j.d;
h+=pow(0.5,n.c)*pow(A,n.c+1)*s*w[n.c].d*pow(e,k.d;
}
cout << "f(" << e << ")=" << f << endl;
cout << "f'(" << e << ")=" << g << endl;
cout << "f''(" << e << ")=" << h << endl;
}
}
102
APPENDIX B
Mathematica Programming for Solving the Falkner-Skan Equation via
Perturbation Series and Shanks Transformation
103
104
105
106
107
108
109
APPENDIX C
Mathematica Programming for Solving the Temperature Boundary Layer
Equation of Blasius Problem (Flat Plate)
Constant wall temperature
110
111
Constant wall heat flux
112
113
APPENDIX D
Mathematica Programming for Solving the Temperature Boundary Layer
Equation of Falkner-Skan Problem (Semi-infinite Wedge)
Constant wall temperature (β = 0.5)
114
115
Constant wall heat flux (β = 0.5)
116
Constant wall temperature and constant wall heat flux (Pr = 0.72)
117
118
119
120
APPENDIX E
Table of the Error Function
z
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
0.18
0.20
0.22
0.24
0.26
0.28
0.30
0.32
0.34
0.36
0.38
0.40
0.42
0.44
0.46
0.48
0.50
0.52
0.54
0.56
0.58
0.60
0.62
0.64
0.66
0.68
0.70
0.72
0.74
erf(z)
0.00000
0.02256
0.04511
0.06762
0.09008
0.11246
0.13476
0.15695
0.17901
0.20094
0.22270
0.24430
0.26570
0.28690
0.30788
0.32863
0.34913
0.36936
0.38933
0.40901
0.42839
0.44749
0.46622
0.48466
0.50275
0.52050
0.53790
0.55494
0.57162
0.58792
0.60386
0.61941
0.63459
0.64938
0.66378
0.67780
0.69143
0.70468
z
0.76
0.78
0.80
0.82
0.84
0.86
0.88
0.90
0.92
0.94
0.96
0.98
1.00
1.02
1.04
1.06
1.08
1.10
1.12
1.14
1.16
1.18
1.20
1.22
1.24
1.26
1.28
1.30
1.32
1.34
1.36
1.38
1.40
1.42
1.44
1.46
1.48
1.50
erf(z)
0.71754
0.73001
0.74210
0.75381
0.76514
0.77610
0.78669
0.79691
0.80677
0.81627
0.82542
0.83423
0.84270
0.85084
0.85865
0.86614
0.87333
0.88020
0.88679
0.89308
0.89910
0.90484
0.91031
0.91553
0.92050
0.92524
0.92973
0.93401
0.93806
0.94191
0.94556
0.94902
0.95228
0.99538
0.95830
0.96105
0.96365
0.96610
z
1.52
1.54
1.56
1.58
1.60
1.62
1.64
1.66
1.68
1.70
1.72
1.74
1.76
1.78
1.80
1.82
1.84
1.86
1.88
1.90
1.92
1.94
1.96
1.98
2.00
2.10
2.20
2.30
2.40
2.50
2.60
2.70
2.80
2.90
3.00
3.20
3.40
3.60
erf(z)
0.96841
0.97059
0.97263
0.97455
0.97635
0.97804
0.97962
0.98110
0.98249
0.98379
0.98500
0.98613
0.98719
0.98817
0.98909
0.98994
0.99074
0.99147
0.99216
0.99279
0.99338
0.99392
0.99443
0.99498
0.99532
0.997020
0.998137
0.998857
0.999311
0.999593
0.999764
0.999866
0.999925
0.999959
0.999978
0.999994
0.999998
1.000000