ADAPTIVE EURO FUZZY I FERE CE SYSTEM APPROACH FOR PREDICTIO OF HYDRAULIC PRESSURE CHA GE
advertisement

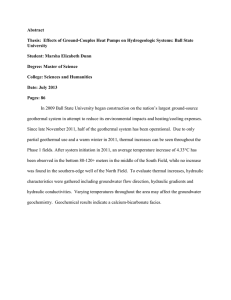
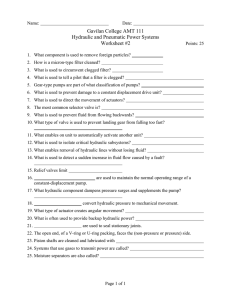
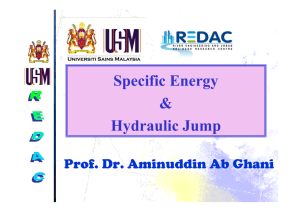
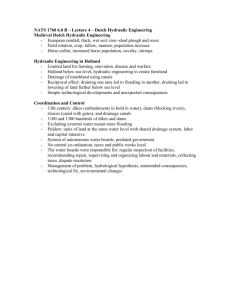
Annual Journal Journal of of Hydraulic Hydraulic Engineering, Engineering, JSCE, JSCE, Vol.54, Vol.54, 2010, February Annual ADAPTIVE EURO FUZZY IFERECE SYSTEM APPROACH FOR PREDICTIO OF HYDRAULIC PRESSURE CHAGE Mebruk MOHAMMED1, Kunio WATANABE2 and Shinji TAKEUCHI3 1 Member of JSCE, M. Eng., Geosphere research Institute, Saitama University (Shimo Okubo 255, Sakura-ku, Saitama, Japan) 2 Member of JSCE, Dr. Eng., Professor, Geosphere research Institute, Saitama University (Shimo Okubo 255, Sakura-ku, Saitama, Japan) 3 Member of JSCE, Dr. Eng., Tono Geosciences Center, Japan Atomic Energy Agency (1-64, Yamanonichi, Akeyo, Mizunami, Gifu, Japan) The effect of continuous subsurface activities like tunneling, pumping, etc. on the surrounding hydraulic pressure is usually predicted using numerical models. For numerical modeling adequate data on the activities, hydrogeology, etc are necessary. However, these data are usually uncertain. Seeking to circumvent these uncertainties inherent to numerical models a new approach is proposed. In this approach, at first, by changing the hydrogeologic parameters three approximate numerical hydraulic pressure trends are formed then adaptive neuro fuzzy inference system (ANFIS) is trained by minimizing the residual between these numerical model trends and the measured hydraulic pressure. Finally the trained ANFIS and the three numerical models are combined in parallel for the inferred pressure prediction. Such modeling approach has been successfully applied to analyze the hydraulic pressure change caused by shafts construction at Mizunami underground research laboratory (MIU) site, Japan. Key Words: AFIS, hydraulic pressure, MIU, umerical model 1. ITRODUCTIO Hydraulic pressure change due to construction of any underground structure shall precisely be predicted to monitor the construction’s effect on the near by groundwater flow. Usually, numerical groundwater flow analysis is conducted for such prediction. These numerical models need precise hydrogeologic, boundary and initial conditions specification over a wide area. It is usually very difficult to obtain such data. On the other hand, if sufficient construction and measured hydraulic pressure data are available for their training, soft computing techniques like adaptive neuro fuzzy inference system (ANFIS) are another alternative method for hydraulic pressure prediction. However, getting enough training data is a challenge for the sole soft computing technique application. In this study the combined use ANFIS with a numerical groundwater flow model is discussed for precise prediction of hydraulic pressure change. The idea is that, at first three hydraulic pressure trends are calculated by a numerical model for simplified hydrogeologic conditions then ANFIS is trained by using the three numerical models as inputs and the measured hydraulic pressure as output. Finally future hydraulic pressure change is predicted using the numerical model predictions as inputs to the trained ANFIS. ANFIS is formed from fusion of artificial neural network (ANN) and fuzzy logic. The fuzzy logic offers concept of fuzzy set theory, fuzzy “if then rules” and approximate reasoning while ANN offers learning capability. Presently, two vertical shafts have been excavated in the underground research laboratory at Mizunami, Japan. Hereafter this site is referred as the MIU site. The changes in groundwater flow brought about by the excavation of shafts have been monitored by observation wells. Ijiri et al.1), using three continuous models (TOUGH2, EQUIV_FLO and Don-Chan) analyzed the regional groundwater flow in Tono area which encompasses MIU. Although these models approximated the general flow direction, the results in terms of travel time and pathway length were found to differ by 3 and 2.5 orders of magnitude, respectively. The study concluded that heterogeneity of the porous media is the major cause for such uncertainty. Yanagizawa et al.2), using a three dimensional finite element method (FEM), analyzed the hydraulic pressure - 43 - change due to an excavation of 150 m long vertical shaft in the Tono area. Despite the use of detailed hydrogeologic investigations, there was as high as 50 m difference in the measured and simulated hydraulic head. Therefore, there is need for devising a method that is capable of handling such uncertainty present in the current continuous modeling approaches. Azhar and Watanabe3), show a successful application of the common ANFIS in monitoring the daily groundwater fluctuation pattern around Saitama city, Japan. Hong et al.4) develop a dynamic fuzzy modeling approach, which is based on multiple local models that are weighted using fuzzy membership functions, to identify and predict groundwater level fluctuations caused by storm water infiltration around Mt. Eden area of Auckland, New Zealand. These studies expect prediction conditions to lie within the training condition. Continuous underground construction results in continuously decreasing hydraulic pressure. This makes prediction condition to be different from the training situation. Thus, in this paper, an approach towards handling such differences in training and prediction conditions using ANFIS is also proposed and evaluated in order to arrive at conclusions regarding the method’s efficiency in predicting continuously decreasing hydraulic pressure caused by construction of the shafts of MIU. MIU MSB-4 MIZ-1 MSB-1 MSB-3 MS VS N MSB-2 DH-2 0 Fig. 1 MIU site area, Shafts and boreholes location m diameter) are now under construction. The two vertical shafts have been excavated in fractured Tertiary sedimentary rock of 0.7-20 millions years of age (Ma) that unconformably overlay a basement rock composed of fractured Toki granite of approximately 60-70 Ma 6). The excavation of the vertical shafts was started in Feb. 2005. On Oct. 27, 2005 as the fluoride concentration of the pumped groundwater was found to exceed the Japanese environmental standard, the excavation was stopped6). Thus, the water level in both shafts had started to rise. On Feb. 20, 2006, since the construction of the water treatment facility was completed, pumping out of the accumulated water had started. The excavation work in the VS and MS was resumed on May 29, and April 4, 2006, respectively (Fig. 2). Among the six boreholes illustrated in Fig. 1, continuous monitoring of hydraulic heads was carried out in DH-2, MSB-1, and MSB-37). There are five pressure sensors at different depths in MSB-1 borehole. Fig. 2 illustrates the observed 2. MIU SITE AD AVAILABLE DATA MIU site is located in Mizunami city, Gifu prefecture, Japan (Fig. 1). It is a research project to establish methods for investigating the geological environment and develop engineering techniques applicable in the deep underground5). Two circular 1000 m length vertical shafts (a main shaft (MS) of 6.5 m diameter and a ventilation shaft (VS) of 4.5 156 MS VS 117.3 m amsl 130 100 72.5 m amsl 56.8 m amsl 70 40 152 148 144 140 10 05/6/23 -50 2004/12/29 05/10/27 136 06/2/20 132 2005/8/26 2006/4/23 Date 2006/12/19 2007/8/16 Fig. 2 Observed hydraulic pressure in MSB-1 borehole, excavation and water level in MS and VS - 44 - Hydraulic pressure (m amsl) Water Level (m amsl) forr MS and VS 160 -20 100m hydraulic pressure changes in MSB-1 borehole from Jan. 1, 2005 till Mar. 07, 2008. The hydraulic pressure changes recorded at 117.3 m, 72.5 m and 56.8 m above mean sea level (amsl) are shown in this Figure. From Fig. 2 it is evident that continuous excavation and pumping results in continuous decrease in the hydraulic pressure trend. 3. THE AFIS MODELIG APPROACH In this model, at first, based on the limited data available for MIU site, a simplified hydrogeologic model with approximate boundary conditions is created. By changing the aquifer parameters of the hydrogeologic model, three patterns of past (measured) and future hydraulic pressure trends are simulated by a three dimensional Galerkin based FEM model called TAGSAC. The TAGSAC model results are then normalized between 0 and 1. Since future minimum value of the measured hydraulic pressure is unknown, its normalization is performed based on its maximum and the average of the predicted minimum values of the TAGSAC results. These normalized TAGSAC and measured hydraulic pressure trends are paired as inputs and output, respectively, without time lag for training of ANFIS. Finally, future hydraulic pressure change is predicted using the normalized TAGSAC results in the future period as inputs to the trained ANFIS. ANFIS models behave as a universal function approximate and can possibly take into account any non-linearity in a relationship8). For this reason, it is used in the present study with an aim of capturing any possible non-linearity in the functional relationship of the TAGSAC model results and the measured hydraulic pressure data. The excavation and pumping data in both shafts are in days to weeks of interval. However, in this study six hour time interval was selected for the hydraulic pressure analysis. Thus, the TAGSAC model is used to change the excavation and pumping data to six hour interval hydraulic pressure trends that can be used as inputs to ANFIS. The shafts have been excavated in deep saturated fractured rock mass5). Therefore, three dimensional saturated TAGSAC model was adopted. The site is essentially composed of sedimentary and granite rocks7),9). The measured hydraulic pressure trend in MSB-1 borehole has shown a change in its usual slope around June 23, 2005 (Fig. 2). This change in hydraulic pressure trend may be due to the entrance of the excavation from the low permeable region to high permeable region. Thus, a two layer model as illustrated in Fig. 3 was adopted as the conceptual hydrogeologic model. To include the natural hydraulic boundaries like rivers and groundwater divides nearby MIU, the analyzed domain was extended beyond the site boundary (Fig. 3). This area was discretized into 20046 nodes that form 37196 triangular prism elements. The main- and ventilation shafts were represented by pile elements. The sizes of the elements around the shafts were the smallest and are gradually increasing towards the boundary of the area. The hydraulic pressure sensors locations in MSB-1 were represented by nodes. Hydraulic conductivity and specific storage measured for the rock of this site are widely distributed9),10). For this reason, different combination of horizontal (KH) and vertical (KV) hydraulic conductivities and specific storage (Ss) were assumed to form the hydrogeologic models. As for the boundary conditions; the ground surface was treated as a free seepage face. A recharge rate of 0.28 mm/day, which is an average infiltration rate estimated in the vicinity of the Tono Mine9) was assigned at the top surface. A constant head equal to the average water level of the Toki and the Hiyoshi rivers was assigned to the nodes representing the rivers. For the nodes along the mountain ridges a no-flow boundary was assigned to represent the groundwater divide11). The side of the entire model domain is assumed as no flow boundary to represent a streamline created by the groundwater divide along the rivers and the ridge11). The minimum excavation level in the analysis period was 0.7 m amsl in VS and -30.3 m amsl in MS. Hence, assuming a no flow boundary at -500 m amsl was expected to have a small effect across the entire groundwater flow domain. Transient boundary condition was assigned for the shaft nodes. During excavation groundwater level in the shafts was equal to the bottom of the excavated shaft. Thus the transient groundwater level was assigned as changing constant head boundary over the shaft nodes near by the shaft’s excavation level. - 45 - Hiyoshi River Ridge MIU site 70m amsl -500m amsl Toki River Fig. 3 Analyzed area and conceptual hydrogeologic model assumed In the TAGSAC model analysis, first, arbitrary combinations of KV and KH were assigned in the two-layer hydrogeologic model. Then a dynamic steady-state hydraulic pressure distribution was calculated for the initial condition11) estimation i.e. before the construction of the shafts commenced. Hydraulic pressure measured in MSB-1 borehole before construction of the shafts was compared with the calculated values. KV and KH values of the two layers with better approximation were selected. Then a transient simulation was analyzed using the obtained initial condition, KV and KH values. In this analysis, the Ss value was adjusted to approximate the measured hydraulic pressure trend. By using different combination of KV, KH and Ss values for the two layers in Fig. 3, three different hydrogeologic models were formed. Table 1 summarizes the set of parameter values obtained for the three TAGSAC model results (FEMA, FEMB, and FEMC). The top and bottom layers in the table mainly represent the sedimentary and the granite rocks, respectively. The next step in this ANFIS modeling approach is normalization. Normalization involves separately rescaling the entire dataset, TAGSAC and measured hydraulic pressure values, in the range of 0 and 1 as in Eq. 1 and Eq. 2. FEM n − Min n , n = A, B, C (1) fem = n Max n − Min n P = PM − Min M Max M − Min M (2) where, Minn and Maxn are the minimum and maximum values of the FEMn trend. MaxM is the maximum of the measured hydraulic pressure (PM). From Fig. 2 it is evident that the measured hydraulic pressure is continuously decreasing, this makes its future value unknown. Thus, the MinM in Input If-part µ1 A femA Rules Table 1 Aquifer parameters obtained Model Layer Top FEMA FEMB FEMC KH(m/s) 3.65E-07 KV(m/s) 1.0E-10 Ss( ) 3.0E-4 Bottom 1.0E-07 5.0E-06 6.0E-6 Top 3.65E-07 1.0E-10 5.0E-4 Bottom 1.0E-07 5.0E-06 6.0E-6 Top 3.65E-07 1.0E-10 1.05E-3 Bottom 1.0E-07 5.0E-06 3.0E-7 Eq. 2 was approximated as an average of the minimums of the TAGSAC model results (Eq. 3). Min A + MinB + MinC (3) MinM = 3 A six layered ANFIS (Fig. 4) trained by backpropagation algorithm have been adopted. The three normalized TAGSAC model results are used as input to ANFIS model. The Output layer has one node to represent the measured hydraulic pressure. ANFIS need additional four layers. The number of nodes in these layers is dependant on the number of membership functions used for each input. Since we have used three membership functions for each input, the If-part will have nine nodes. The maximum number of rules formed by taking three membership functions (one from each input) at a time will be 27. Hence the number of nodes in Rule, orm and Then-part layers will be 27. The ANFIS used here is based on first order Sugeno type fuzzy model with Gaussian membership function (GMF), product inference rule, and weighted average defuzzifier expressed as a typical rule Rj: If fem A is µ Ai and femB is µ Bk and femC is µ Cm then (4) f j = a 0 j + a Aj × fem A + a Bj × femB + aCj × femC In which a0j, aAj, aBj, and aCj are real numbers to be optimized during training of the ANFIS. Norm Then-part W1 W1 f1 W2 Wj fj µ2 A Output µ3 A µ1 B femB µ2 B µ femC ∑ 3 µ 1 µ 2 B C C µ3 C f27 W 27 W27 femA Fig. 4 Architecture of the ANFIS model - 46 - femB femC O The input node passes normalized TAGSAC results (femn) to If-part of a rule. The If-part specifies the degree to which the given femn satisfies the GMF, µi (Eq. 5). The Rules and orm layers node output specifies the firing strength of a rule (Eq. 6) and the normalized firing strength of a rule (Eq. 7), respectively. The Then-part calculates the weighted consequent value of a rule (Eq. 4). The Output layer of the system sums all incoming values from the Then-part as in Eq. 8. fem − c i n n µ ( fem n ) = exp − σ ni i n 2 W j = µ Ai × µ Bk × µ Cm Wj ∑W (6) (7) j 27 (8) O = ∑W j f j j =1 where i = k = m =1,2,3; j =1,2, 3…, 27; n = A,B,C; cin and σin are parameter sets to be adjusted during training of the ANFIS. The fuzzy logic system, once represented as the equivalent input-output feed forward network (Fig. 4), it can be trained using any suitable training algorithm such as the standard backpropagation algorithm. In backpropagation algorithm, it is standard practice to divide the dataset (the TAGSAC results and measured hydraulic pressure) into two phases: training and test phases, the former is used for training (optimizing the ANFIS parameters) of the model, and the later set is used to check the accuracy of trained model. While training ANFIS, values of the Output node are compared with the normalized measured hydraulic pressure data in the training phase and the Mean square error (MSE) is calculated. If MSE is within acceptable limit the process is terminated otherwise feed backward pass is carried out for updating cin and σin in Eq. 5 and alj in Eq. 4. See Palit et al.12) for the detail approach. Three types of measures of the goodness of fit were used to check the performance of the proposed ANFIS model; these are coefficient of efficiency (CE), coefficient of determination (CD), and root mean square error (RMSE). For perfect prediction CD and CE tend to one and RMSE tends to zero13). Six hour interval data from Jan.1, 2005 till Mar. 7, 2008 were used. After neglecting some faulty measured data points, 70% of the total data points were used for training and 30% for testing of the proposed ANFIS model. The three TAGSAC and ANFIS models results for 56.8 m amsl sensor in MSB-1 are shown in Fig. 5. In Fig. 5 the residual after subtracting ANFIS model value from the measured value is also depicted. Similar results were also obtained for other sensors in MSB-1. For 56.8 m amsl sensor, the training phase CE, CD and RMSE values were 0.998, 0.998 and 0.187 m, respectively. However, CE, CD and RMSE values obtained for the best among the three TAGSAC models were 0.982, 1.019 and 0.563 m, respectively. In all the three measures of goodness the ANFIS model has performed better than the best TAGSAC model. It has been reported that models having CE values above 0.8 are acceptable8). According to this criterion the ANFIS model training was successful. The performance of the trained ANFIS model in the test phase was also checked in terms of CE, CD and RMSE for different test phase periods. The results were as shown in Fig. 6. The test phase indicates the next 60 to 358 continuous days after the end of the training phase. From Fig. 6 it is evident that the ANFIS model performs better in shorter testing periods. Similar results were also obtained for other sensors in MSB-1. TAGSAC was also adopted to analyze the hydraulic pressure distribution around MIU10). Hydraulic pressure (m amsl) 154 1 FEMA FEM C ANFIS 150 146 FEM B Measured Residual 142 0.5 0 138 Residual (m) Wj = (5) 4. RESULTS AD DISCUSSIO -0.5 134 130 2004/12/29 Test Phase Training Phase 2005/10/25 2006/8/21 Date 2007/6/17 Fig. 5 The three TAGSAC and ANFIS models results - 47 - -1 subsurface activities. 1.6 CD CE RMSE 0.3 0.2 1.2 0.1 1 0.8 REFERECES RMSE (m) CD/CE ( ) 1.4 0 60 120 180 240 300 Test phase period (days) 360 Fig. 6 CE, CD and RMSE for different test phase periods for 56.6 m amsl sensor Despite the use of field measured hydraulic properties, the result of the study showed as much as 30 m difference in the measured and modeled hydraulic pressure values10). This result is far more than the maximum residual obtained using the ANFIS modeling approach. The report claims lack of enough hydraulic properties as a cause for such magnitude of error10). On the contrary the proposed ANFIS modeling approach did not use expensive and time consuming hydrogeologic studies, yet it resulted in better simulated values. Any model that involves training need actual (measured) data to be trained on. Lack of such data limits the application of the proposed ANFIS model. Therefore, having the advantages discussed above, this model needs this critical measured hydraulic pressure data without which the approach will not be successful. 5. COCLUSIO An ANFIS model was developed for the prediction of the hydraulic pressure change at MIU site; Japan. The model is found to have a better prediction results than numerical models developed under uncertainties and lack of aquifer parameters. The measures of goodness of fit values obtained for training and test periods are very good. This can clearly indicate the application of the proposed model in hydraulic pressure prediction. However, this model need measured hydraulic pressure data to optimize its model parameters. The results also indicate, by modifying the usual normalization approach, the operation range of ANFIS can be extended. This extension of operation range creates an advantage to apply ANFIS for prediction of continuously decreasing hydraulic pressure. Although the dynamicity of the groundwater flow pattern in MIU project area is complex due to construction of two shafts, the proposed ANFIS modeling approach have shown very good result. Therefore, this modeling approach would also have good results if it is applied in case of analyzing hydraulic pressure changes caused by other 1) Ijiri Y., Saegusa H., Sawada A., Ono M., Watanabe K., Karasaki K., Doughty C., Shimo M. and Fumimura K.: Evaluation of uncertainties originating from the different modeling approaches applied to analyze regional groundwater flow in the Tono area of Japan, J. Contam. Hydrol., Vol.103, pp.168-181, 2009. 2) Yanagizawa K., Imai H., Furuya K. and Nishigaki M.: The effects of a shaft excavation experiment on the hydrology of the Tono research field, Japan, J. Hydrol., Vol.171, pp.165-190, 1995. 3) Azhar K. A. and Watanabe K.: Daily groundwater level fluctuation forecasting using soft computing technique, ature and science, Vol.5(2), pp.1-10, 2007. 4) Hong Y. S., Michael R. R. and Robert R. R.: Dynamic Fuzzy Modeling of Storm Water Infiltration in Urban Fractured Aquifers, J. Hydrol. Eng., Vol.7(5), pp.380-391, 2002. 5) Japan nuclear cycle development institute: Master Plan of the Mizunami Underground Research Laboratory Project, Japan, JNC Technical Report, JNC TN7410 2003-001, 2002. 6) Takeuchi S., Takeuchi R., Salden W., Saegusa H., Arai T. and Matsuki K.: Hydrogeological conceptual model determined from baseline and construction phase groundwater pressure and surface tilt meter data at the Mizunami Underground Research Laboratory, Japan, Proceedings of the 11th International Conference, ICEM2007, 2007. 7) Goto J, Ikeda K, Kumazaki N, Mukai K, Iwatsuki T. and Hama K.: Working Program for Shallow Borehole Investigations, Japan Tono Geosciences Center, Japan Nuclear Cycle Development Institute, JNC TN7400 2002-005, 2002. 8) Shu C. and Ouarda T.B.M.J.: Regional flood frequency analysis at ungauged sites using the adaptive neuro-fuzzy inference system, J. Hydrol. Vol.349, pp.31-43, 2008. 9) Kumazaki N., Ikeda K., Goto J., Mukai K., Iwatsuki T. and Furue R.: Synthesis of the Shallow Borehole Investigations at the MIU Construction Site, Japan Tono Geosciences Centre, Japan Nuclear Cycle Development Institute, JNC TN7400 2003-005, 2003. 10) Japan nuclear cycle development institute: Mizunami Underground Research Laboratory Project Results from 1996-1999 (Revised edition), JNC Technical Report, JNC TN7400 2003-004, 2001. 11) Anderson M. P. and Woessener W. W.: Applied Groundwater Modeling-Simulation of Flow and Advective Transport, Academic Press, San Diego, 1992. 12) Palit A. K., Doeding G., Anheier W. and Popovich D.: Backpropagation based training algorithm for TakagiSugeno type MIMO neuro-fuzzy network to forecast electrical load time series, FUZZ-IEEE’02, pp.86-91, 2002. 13) Karlheinz S. and Moreno J.: A practical guide to groundwater and solute transport modeling, John Wiley & Sons Inc, pp.201-270, New York, 1996. - 48 - (Received September 30, 2009)