Supporting Information for: October 15, 2008 Model Details
advertisement

Supporting Information for:
Mechanisms of Size Control and Polymorphism in Viral Capsid Assembly
October 15, 2008
Model Details
Bond vector construction. Our models are derived from the T =1 and T =3 crystal structures of BMV capsids by
associating each twofold or quasi-twofold symmetry axis (the dimer interfaces) with the center of a spherical subunit.
We then draw a ‘bond’ at each interface between neighboring subunits, resulting in Fig. 1a. We construct the subunit
geometries such that each subunit has a ‘bond-vector’ pointing from its center toward each of its interfaces, which
are indexed as listed in Table 1. At the same time, we construct a table of interfaces, Table 1b, that specifies for each
interface a pair of primary bond vectors, α and β, and a pair of secondary bond vectors, γ and δ. The primary bond
vectors designate the interface on each subunit across which the favorable bond is formed. The secondary bond vectors, also one from each subunit, are used to define a dihedral angle. This interaction enforces directional specificity
in the plane perpendicular to the primary pair, thereby creating a bond that resists torsion. During the simulation,
we store the orientation of each subunit as a vector in a hybrid reference frame where the origin is the center of the
subunit but the orientation is with respect to the global coordinate system. When the subunit experiences a torque,
all its bond-vectors rotate rigidly – i.e. the bond vectors have no internal degrees of freedom that could change their
relative orientations.
Energy function parameters. We adopt the notation bα
i to denote the bond-vector with index α on subunit i,
and Rij the vector connecting the center of subunit j to the center of subunit i. The energy of interaction between
subunits i and j is calculated by summing the energy of each possible interface (see Eqs. (1-5) in the main text).
The energy of each interface depends on three quantities:
β
b
1. The magnitude of the distance between the primary pair: rij
= |bα
j − bi + Rij |.
β
β
b
α
2. The bending angle between the primary pair: cos θij
= −bα
i · bj /|bi ||bj |.
3. The dihedral angle between the projections of the secondary pair onto the plane perpendicular to Rij : cos(φbij ) =
bγ ×R
bδ ×Rij
ij
−( |bγi ×Rij
) · ( |bjδ ×Rij | ).
|
i
j
We note that although each individual bond-vector is potentially capable of binding with complementary partners
on more than one subunit, the subunit excluded volume and parameter cutoffs used in this work restrict participation to one interface at a time. Similarly, two subunits potentially could interact through multiple bond vectors,
but the parameter values used here restrict significant interactions to one interface per subunit pair at any given time.
Quasi-equivalence and conformation specificity. If subunits had perfect conformational specificity, the interaction
between complementary interfaces on two subunits is favorable only if that combination of interfaces and subunit
conformations occurs in the capsid crystal structure. For example, if subunit i is in conformation state AB, for each
bond vector index α there is only one conformation state for subunit j that would correspond to an interaction seen
in the T =3 BMV capsid crystal structure (AB for α = 1 or 4, CC for α = 2 or 3). Thus, in addition to specifying
the primary and secondary pairs of bond vectors for each interface, we also specify which conformation pairs bind
natively via that interface. The list of conformation pairs for each interface is given in the final three columns of
Table 1b. To model subunits that can form either T =3 or T =1 capsids, the list includes all conformation pairs
across each interface in both T =3 and T =1 crystal structures (all interactions are between AA subunits in T =1
capsids). When considering interactions between AB and AA subunits, we only require that the monomer-monomer
interaction can be found in a crystal structure, so bond vectors which represent the A monomer (1 and 4) in AB
1
(a) AB
1
2
3
4
x
0.5
-0.153
-0.153
0.5
(b) CC
y
0.809
0.883
-0.883
-0.809
z
-0.309
0.444
0.444
-0.309
1
2
3
4
x
0.5
-0.5
-0.5
0.5
y
-0.848
-0.848
0.848
0.848
(c) AA
z
-0.175
-0.175
-0.175
-0.175
1
2
3
4
x
0.5
-0.5
-0.5
0.5
y
0.809
0.809
-0.809
-0.809
z
-0.309
-0.309
-0.309
-0.309
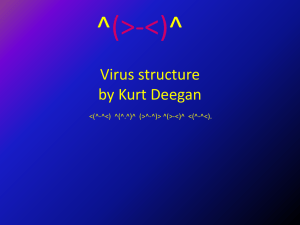
Table 1: Bond vector geometries for subunits with AB, CC, and AA conformational states, respectively, based on the arrangement of
dimer subunits in T =3 and T =1 the BMV capsid crystal structures, as explained in the text. A unit vector is specified in the direction
of each bond vector (numbered 1-4). The actual length of each bond vector is b = 2−5/6 .
(b)
(a)
α
1
1
2
2
3
3
4
4
β
2
4
1
3
2
4
1
3
γ
2
4
1
1
4
4
1
3
δ
1
1
2
4
1
3
4
4
AB
AB
AB, AA
CC
CC
CC
CC
AB, AA
AB
CC
AB
AB
AB
AB
AA
AA
AB, AA
AB, AA
AA
AB, AA
AA
AB, AA
AA
Figure 1: (a) Model T 3 and T 1 capsids (to scale) with subunits colored by conformation – AA: grey, AB: red, CC: blue. (b)
Table of interfaces specifying the primary (α and β) and secondary (γ and δ) bond vector pairs involved in each potential
favorable interaction, as described in the text. For an interaction between two subunits, say subunit i and subunit j, for each
bond vector index listed in the first column (α) on subunit i, the next three columns respectively specify the complementary
bond vector index (β) on subunit j, the secondary bond vector index on subunit i (γ), and the secondary bond vector index
on subunit j (δ). The final 3 columns specify which conformations natively bind via that interface. For subunit i with the
conformation state given by the column heading, each row lists the conformation states of subunit j for which that interface
is seen T =3 or T =1 crystal structure.
(a)
(b)
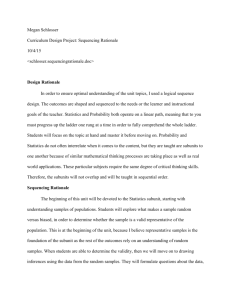
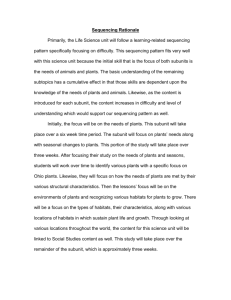
Figure 2: Representative snapshots of malformed capsids from simulations with conformation specificity parameters of (a) χs = 0.75, (b)
χs = 0.95. In (a), we can see both well-formed pentamers (just right of center) and strained pentamers and hexamers (directly facing). In
(b), there are no well-formed pentamers or hexamers and the capsid structure is more strained than the structure in (a). Both structures
were found to be stable in infinite dilution (simulated no free subunits and no particle insertions in the bath region).
subunits can interact with another A monomer in either AA or AB subunits (recall that A monomers visible in
CCMV T =3 and T =1 are virtual identical).
2
The limits of conformational non-specificity. We systematically relax the constraint that only native interactions
are possible by introducing a specificity parameter χbij into equation (3) of the main text, which is defined by:
χbij = 1 if the interface b is seen in the crystal structure for the conformational states of subunits i and j, otherwise,
χbij = χs . As shown in figure 5 of the main text, assembly yields are insensitive to the conformational specificity
<
parameter, χs for χs ∼
75%, while higher values, indicating less specificity, lead to predominantly malformed, but
closed, capsids. For values of χs near the critical value, the capsids are primarily malformed by substitution of
hexamers and pentamers which lead to violations of quasi-symmetry, as illustrated by the representative snapshot in
Fig.2a. As χs → 1, the deformations become more extreme and the resulting structures have no discernable spatial
ordering of conformations, as shown by the snapshot in Fig. 2b.
T4 Capsid Geometry
(a)
(b) AD
1
2
3
4
x
0.5
-0.184
-0.184
0.5
y
0.809
0.891
-0.891
-0.809
(d)
z
-0.309
0.416
0.416
-0.309
(c) EF
1
2
3
4
x
0.5
-0.154
-0.272
0.382
y
0.809
0.883
-0.817
-0.891
z
-0.309
0.444
0.508
-0.245
α
1
1
2
2
3
3
4
4
β
4
2
1
3
2
4
1
3
γ
4
2
1
1
4
4
1
3
δ
1
1
2
4
1
3
4
4
AD
AD
EF
AD
EF
AD
EF
EF
AD
EF
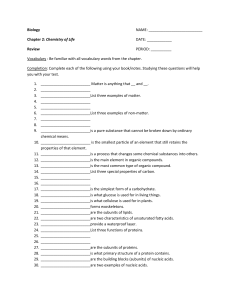
Figure 3: Model T =4 capsid with subunits colored by conformation – AD: red, EF: blue. a) Model T =4 capsid with subunits colored
by conformation – AD: red, EF: blue. b,c) Bond vector geometries for subunits with AD and EF conformational states. d) Table of
interfaces for T =4 model capsids – see 1b for explanation.
In this section we extend our model to include subunit geometries that form a T =4 capsid, in order to further
understand the requirements for and limitations of adaptable assembly around interior cores. To our knowledge,
however, there has been no experimental observation of a T =4 capsid for BMV or CCMV capsid proteins1 . In
particular, Sun et al.3 report that only disordered assemblages of BMV capsid proteins form around nanoparticles
with diameters larger than 12 nm. These findings suggest that conformations with interaction geometries consistent
with a T =4 capsid are not favorable for BMV capsid proteins.
The subunit geometries and bonding rules consistent with a T =4 capsid are given in Tables 3b-3d and the
model capsid structure is shown in Fig.3a. Empty capsid simulations of this model have yields similar to T =3 or
T =1 models with similar sensitivity to system parameters and similar assembly kinetics. Furthermore, the subunits
assemble with high packaging efficiencies (> 80%) around compatible nanoparticles (Rs ∈ [3.4, 3.7]) with Rs = 3.6
as the ideal template size.
We investigate polymorphism by allowing subunits to take the CC conformation (table 1b) as well – the system
can now assemble both T =3 model capsids (60 AD, 30 CC) and T =4 model capsids (60 AD, 60 EF). The binding
rules for AD and EF subunits are as listed in Tables 3b-3d, while the binding rules for CC subunits are identical
to the T =3 case (table 1b), with AD subunits considered identical to AB subunits 2 . We do not allow any binding
between CC and EF subunits. These modified subunits have relatively low yields of perfect T =3 or T =4 capsids
around nanoparticles in the range Rs ∈ [3.2, 3.6]. Instead, as shown in Fig. ??, a large fraction of these trajectories
result in nanoparticle encapsidation by closed but disordered assemblages that lack (quasi)symmetry. In addition,
some trajectories become so disordered that they simply cannot close before the observation time, as in Fig. 5b.
1 Structures with larger sizes, roughly consistent with T =7 capsids, have been reported for CCMV and BMV – see refs 5 of the main
text.
2 Since the AD geometry is almost identical to the AB geometry, they differ by ≈ 1◦ , we find that systems with only AD and CC
subunits behave identically to AB/CC systems – both encapsidate T =3-sized nanoparticles with 100% efficiency.
3
0.5
£
0.4ì
¢
0.3
fs
0.2æ
0.1
0.
3.2
w
Native T3
£
¢
¢
£
ô
ì
æ
ò
ô
ò
3.3
3.4
Rs
ô
ò
¢
£
3.5
ô
ò
¢
£
à
æ
ì
ò
¢
£
ES =8
T=3
ES =10 T=3
ES =8
T=4
ES =10 T=4
ES =8
Disordered
ES =10
Disordered
3.6
w
Native T4
Figure 4: Packaging efficiency of subunits capable of making T =3 and T =4 morphologies as a function of the nanoparticle radius Rs . A
large fraction of such attempts end with disordered assemblages instead of properly ordered capsids.
The observation that assembly adaption between T =3 and T =4 size cores is less efficient than between T =1 and
T =3 cores can be understood by noting that the ratio of curvatures between T =1 and T =3 model capsids is 2.7,
but only 1.13 between T =1 and T =3. The small difference in curvature between T =3 and T =4 sized nanoparticles
provides only a weak driving force towards a commensurate capsid morphology, especially for small intermediates.
Given that morphology size can be chosen by intermediates with as few as 7 subunits, it is not surprising that
incommensurate partial capsids are common. Furthermore, incommensurate partial capsids can cover much of the
surface area of the nanoparticle while maintaining strong subunit-subunit interactions (c.f. Fig. 7a in the main text)
before becoming incompatible with a mismatched nanoparticle. For large regions in parameter space for T =3/T =4
subunits, formation of a disordered but closed structure from a large mismatched partial capsid is kinetically more
probable that disassembly.
In addition to resulting in less efficient assembly kinetics, the small difference in curvature between T =3 and T =4
capsid geometries is important from an equilibrium perspective. Because the EF and CC geometries are similar,
groups of 3 EF subunits can create a defect in a T =3 lattice, as seen in Fig. 5a and, similarly, a single CC subunit
can displace 3 EF subunits in a T =4 lattice. Thus, there is a relatively small energy difference between a 90-subunit
perfect T =3 morphology (60AD, 30 CC) and a strained 96 subunit structure (60 AD, 27 CC, 9 EF) that is the most
commonly observed disordered state for core sizes close to Rs = 3.2.
Commitor Probabilities and the critical nucleus size. To better understand the dynamics of assembly
intermediates, we estimated the size of the “critical nucleus”, at which a partial capsid is more likely to grow to
completion than to dissociate back into single subunits. A system with N = 10000 subunits and a box side length
of L = 48.5 was simulated until t = 40t0 , at which point a representative population of small intermediates (with
fewer than 15) has formed, but there are no large intermediates. This configuration was then used as the initial
state for further simulations with different random number seeds, which were run to completion (t = 8000t0 ). For
each simulation, we trace the size as a function of time for each intermediate that was present in the initial state,
until either it dissociates (chosen as size < 3) or becomes a complete capsid. To minimize computational cost,
we considered an intermediate as complete as soon as it reached a size of 20 or larger; all such intermediates are
stable at these parameter values and would eventually grow into complete capsids. We then estimate the ‘commitor
probability’ for each intermediate, or the fraction of trajectories in which the intermediate grows to a complete capsid
without first dissociating. The commitor probabilities averaged over all intermediates of a given size are shown in
Fig. 6a; the average commitor probability crosses 0.5 between intermediate sizes of 6 and 7, suggesting a critical
nucleus size of 7. However, note that this value is only a rough estimate, since the identity of critical nuclei depends
on additional parameters, such as the number of bonds and closed polygons – i.e. the intermediate size alone is not
4
(a)
(b)
Figure 5: Snapshots of two asymmetric structures formed around a T =3-size sphere (Rs = 3.2) by subunits capable of assembling into
T =3 and T =4 capsids. Subunits are colored according to conformation: AD red, CC blue, EF brown. a) Defect in a T =3 lattice where
two CC subunits have each been replaced with 3 EF subunits. b) Final frame of a simulation trajectory that ended without a closed
capsid – there is a dislocation line where two edges of a partial capsid that is mostly consistent with a T =4 geometry are incapable of
meshing.
sufficient for a good reaction coordinate.
The critical morphology size. The transition between predominantly T =1 and T =3 capsids with increasing
εAA (Fig. 3 in the main text) suggests that the final morphology of a growing capsid is determined from subunit
conformations early in the assembly, indicating that there may be a ‘critical’ intermediate size at which the morphology is determined. According to this hypothesis, the faction of T =1 final capsids is determined by the fraction of
morphology determining nuclei that are comprised of AA subunits, and thus the ratio of final capsid products will
vary with εAA according to
1
1
fT1 =
(1)
=
[T 1]N
1
+
3
exp(n
c (εAA − log 2))
1+3
[T 3]N
[T 1]
where fT1 is the mass fraction of assembled material in a T =1 capsid, [T 3]N is the ratio of T =1 nuclei to T =3 nuclei
N
which, which we assume is dictated by the relative Boltzmann weights of nuclei in each conformation, and nc is the
number of subunits in a nucleus that must have the AA conformation to form a T =1 capsid. As shown in Fig. 6b,
fitting the ratio of subunits in T =1 capsid’s to the right-hand side of Eq. 1 yields an estimate of 6.5 < Nc < 8.0,
suggesting that the critical morphology size is similar to the critical nucleus size at these parameters.
5
(a)
(b)
1.0
1.0
0.8
0.8
0.6
0.6
Pcomp
fT1
0.4
0.4
0.2
0.2
0.0
0
2
4
6
8
Size
10
12
0.0
0.0
14
0.2
0.4
0.6
0.8
EAA
1.0
1.2
1.4
Figure 6: a) Probability that an assembly intermediate will grow to form a complete capsid as a function of its size in number of subunits.
b) Fraction of subunits assembled into T =1 capsids at the final observation time, as a function of εAA with the fit from equation 1
overlayed with nc = 7.25.
Numerical calculation of csurf
We can accurately estimate csurf , the equilibrium concentration of subunits on the surface of the nanoparticle in
the absence of any assembly, by minimizing (with respect to csurf ) the free energy for adsorbed subunits coupled to
a subunit bath with concentration c0 . Recalling that the energy of a particle in the vicinity of the nanoparticle is
(Eq. 7 of the main text):
12 6 12 6 !
σ
σ
σ
σ
−
−
+
(2)
U (r) = 4εs
r − Rs
r − Rs
rc
rc
where σ is the particle diameter and rc = 2.5σ is the cutoff distance. We define particles as adsorbed if they are
within approximately one diameter of the minimum, r ∈ [Rs , Rs + 21/6 ]. The free energy change for a subunit moving
from the bath onto the sphere is then:
Z
Rs +21/6
∆F = − log
Rs
2η
9η
−7
csurf
log(1 − η) +
+
+
dr 4πr2 e−U (r) − 1 + log
c0
8
1 − η 8(1 − η)2
|
{z
}
(3)
µcs
where c0 is the bath concentration, the excess chemical potential µcs of adsorbed subunits is derived from the
π(σ/2)2
Carnahan-Starling equation of state for hard discs on a two-dimensional surface 3 , η = 4π(Rnsa+2
1/6 −σ/2)2 is the twodimensional packing fraction of na subunits adsorbed on the sphere surface, and Rs is the radius of the sphere. The
−1
. We tested the prediction against simulations
surface concentration is given by csurf = na σ 3 43 π(RS + σ)3 − RS3
with εb = 0 for various concentrations and subunit-nanoparticle energies εs . As shown in Fig. 7, the predicted values
for na fall within the error of measurement with no adjustable parameters.
3 See e.g. Carnahan N. F. and Starling K. E. J. Chem. Phys. 51, 635, (1969) or Siepmann, J.I. et. al Journal of Physics-Condensed
Matter 4,3 679, (1992)
6
¢
ô
ò
ì
æ
à
90
¢
ô
ò
ì
æ
à
80
¢
ô
ò
ì
æ
à
70
na
¢
ô
ò
ì
æ
à
60
¢
ô
ò
50 ì
æ
à
7
c0
¢
ô
ò
ì
æ
à
8
9
ES
2.2 ´ 10-2
2.0 ´ 10-2
1.7 ´ 10-2
1.5 ´ 10-2
1.2 ´ 10-2
9.8 ´ 10-3
10
11
Figure 7: Equilibrium number of adsorbed subunits on the nanoparticle, na , as a function of εs for various c0 overlaid with the numerical
solutions of equation 3 (with no adjustable parameters).
1.0
0.8
fs
0.6
à
æ
ì
ò
ô
¢
ò æ
ìô òà
æ ¢ æ
¢ ì à
à
æ
c0
3.2 ´ 10-4
6.0 ´ 10-3
1.0 ´ 10-2
à
ìæ
6.0 ´ 10-2
à
¢
¢ ò
ô
ì
òì
æ
ì ì
ò ò
ô¢
æ à
ò
à
à
æ
æ
ô
1.4 ´ 10-3
0.4
0.2
à
1.0 ´ 10-3
ìò æà ì
à
æ
æì
ì òì
ì ò
ì ò
ò ò ò
ò
ô
ôà
¢
ì ì òì ô
æ
à ò ìæ
0.0
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
csurf
Figure 8: The effect of subunit adsorption timescales on frustration can be seen in simulations where the particle exchange with the bath
has been artificially lowered below the diffusion limited rate. Here we have plotted the packaging efficiency on a T =1 size nanoparticle
for several bulk subunit concentrations plotted as a function of equilibrium surface concentration, csurf , just as in Fig. 9 on the main
text. In contrast with Fig. 9 of the main text, assembly is productive at much higher csurf indicating that slowing the adsorption of free
subunits decreases frustration. The conformational free energy for these simulations is εAA = 1.25.
7