Localization of the subjective vertical during roll, pitch, and recumbent
advertisement

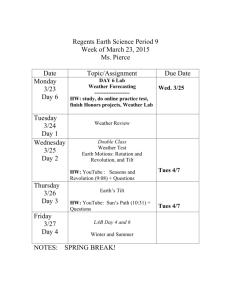
Exp Brain Res (2006) DOI 10.1007/s00221-006-0385-y R ES E AR C H A RT I C L E Simone B. Bortolami Æ Alberto Pierobon Paul DiZio Æ James R. Lackner Localization of the subjective vertical during roll, pitch, and recumbent yaw body tilt Received: 13 May 2005 / Accepted: 13 January 2006 Springer-Verlag 2006 Abstract Localization of the subjective vertical during body tilt in pitch and in roll has been extensively studied because of the relevance of these axes for aviation and control of posture. Studies of yaw orientation relative to gravity are lacking. Our goal was to perform the first thorough evaluation of static orientation in recumbent yaw and to collect as efficiently as possible roll and pitch orientation data which would be consistent with the literature, using the same technique as our yaw tests. This would create the first comprehensive, coherent data set for all three axes suitable for quantitative tridimensional modeling of spatial orientation. We tested localization of the vertical for subjects tilted in pitch (100 to +130), in roll (90 to +90), and in yaw while recumbent (80 to +80). We had subjects point a gravity-neutral probe to the gravitational vertical (haptically indicated vertical) and report verbally their perceived tilt. Subjects underestimated their body tilts in recumbent yaw and pitch and overestimated their tilts in roll. The haptic settings for pitch and roll were consistent with data in the literature obtained with haptic and visual indications. Our data constitute the first tridimensional assessment of the subjective vertical using a common measurement procedure and provide the basis for the tri-axial modeling of vestibular function presented in the companion paper. Keywords Spatial orientation Æ Otolith Æ Somatosensation Æ Subjective vertical Æ Gravity Æ Roll tilt Æ Pitch tilt Æ Recumbent yaw tilt Æ Sensory illusions Æ Haptic vertical S. B. Bortolami (&) Æ A. Pierobon Æ P. DiZio Æ J. R. Lackner Ashton Graybiel Spatial Orientation Laboratory, MS 033, Brandeis University, Waltham, MA 02454-9110, USA E-mail: Simborto@brandeis.edu Tel.: +1-781-7362033 Fax: +1-781-7362031 P. DiZio Æ J. R. Lackner Volen Center for Complex Systems, Brandeis University, Waltham, MA 02454-9110, USA Introduction Maintaining orientation to the upright is a key feature of human and animal behavior. Many systems contribute to this capacity including the auditory, visual, vestibular, somatosensory, proprioceptive, and motor systems. Considerable emphasis has been placed on understanding the contribution of the vestibular system to orientation because of its significance for aviation and space flight, where unusual force levels and accelerations are encountered. Illusions involving misperception of self and vehicle orientation arise from transient (e.g. catapult launches) or quasi-static (e.g. prolonged banked turns) changes in gravitoinertial force. Most of the work on orientation mechanisms has concentrated on the roll and pitch axes relative to gravity because of their relevance for aerospace flight and normal postural control on Earth (e.g. Bourdon 1906; Clark and Graybiel 1962; Colenbrander 1964; Correia et al. 1968; Curthoys et al. 1990; Mittelstaedt 1983, 1992; Mast and Jarchow 1996; Glasauer and Mittelstaedt 1997; Bohmer and Mast 1999; Van Beuzekom and Van Gisbergen 2000; Clement et al. 2003; Kaptein and Van Gisbergen 2004). Spatial orientation dynamics with the head horizontal has been studied during horizontal axis rotation (Benson and Barnes 1970; Mast et al. 2002); however, static performance with the body horizontal and tilted about its spinal axis relative to gravity, which we call recumbent yaw, is virtually uncharted. Many techniques have been used to assess apparent orientation to gravity. Visual measurements usually involve setting a luminous line or shape to what the subject perceives to be the vertical or horizontal. Haptic settings involve a blindfolded subject manually aligning a gravity-neutral rod with the perceived gravitational vertical. The latter approach has the advantage of not being influenced by vestibulo-ocular reflexes. For example, during roll body tilt, the eyes counterroll in the opposite direction by approximately 10% of the tilt (Miller and Graybiel 1962). Both tilt amplitude and background force level affect the magnitude of the counterrolling. During pitch tilt, there is a doll’s eye reflex (Citek and Ebenholtz 1996) that influences eye position.1 The presence of these reflexes may affect orientation judgments that are made using visual indicators. The interrelation of internal representations of gravity and visual perception is still an object of active investigation (cf. Van Beuzekom and Van Gisbergen 2000). Betts and Curthoys (1998) have shown that during body tilt settings of the visually perceived vertical and horizontal are not orthogonal to one another. Consequently, care must be taken in inferring the apparent orientation of the body from visual settings. Our ultimate objective is to develop an adequate model of tri-dimensional mechanisms of spatial orientation that will be applicable regardless of gravitoinertial force level. To develop and test a tri-dimensional model of spatial orientation we needed a comprehensive data set not influenced by ocular reflexes for all three independent axes. To produce such a data set, we tested blindfolded subjects at different angles of tilt in roll and in pitch, and at different yaw angles while they were recumbent. Subjects used two methods to indicate their perceived self tilt with respect to gravity, a hand-manipulated rod and verbal reports of self tilt. They were exposed to roll and pitch angles that generally equaled or exceeded ones used in earlier studies of these axes. We compared our data for the roll and pitch axes with those available in the literature collected using visual and haptic indication techniques to see which methods gave similar results. There was no precedent for recumbent yaw axis orientation judgments. Materials and methods Subjects We tested 27 naı̈ve subjects. The subjects had been screened using a medical history questionnaire to exclude any candidates with sensory-motor or balance impairments that could have compromised their performance. They ranged from 20 to 60 years of age. The experimental protocol was approved by the Brandeis University Human Subjects Review Board, and each subject gave written informed consent. Three subjects participated in all three experimental conditions, others in one or two. Table 1 shows the overlap of subjects in the three conditions. A larger sample was tested in recumbent yaw than in pitch and roll because there was no precedent for the yaw data. 1 Unlike ocular counterrolling, the doll’s eye effect is eliminated by visual fixation. The effect influences mainly the vertical axis, the eyes pitch upward when the subject is pitched forward and downward during backward tilt. Table 1 Overlap of subjects across the roll, pitch, and recumbent yaw conditions Pitch, N=7 Roll, N=6 Recumbent yaw, N=25 1 2 3 4 5 6 7 1 1 2 6 7 8 9 10 4 5 6 7 8 9 11–27 Apparatus and experimental conditions Two pieces of equipment were used to orient subjects relative to the gravitational vertical, an upright pitch/ roll device and a bed-like yaw device. Figure 1a shows the sign convention and frame of reference we adopted for our experiments. Positive angles represent pitch forward, roll right ear down and recumbent yaw left ear down (right hand coordinate system). One device provided roll (±90) and pitch (100 to +130) body tilts, the other allowed for recumbent yaw (±80) tilts. Figure 1b depicts the three axes tested in the experiments, the subjects’ body configuration, and the rod (gravity-neutral probe) subjects used for indicating the vertical (haptically indicated vertical). Both devices were manually tilted to prescribed angles read off from protractors graduated in 1 increments. The roll axis corresponds to the subject’s naso-occipital axis; and, the roll angles used were ±90, ±70, ±50, ±30, 0. The pitch/roll device could only be tilted backwards in pitch from the vertical start position; therefore, subjects were positioned face-out of the apparatus for pitch back trials and face-in for pitch forward trials, which were run in separate sessions. Forward pitch angles of 0, 10, 30, 50, 80, 110 and 130 were used. Pitch backward angles were limited to 10, 30, 60, 90, 100, because of limitations imposed by restraining subjects facing out of the apparatus. The pitch axis was about 85 cm posterior to the body’s center of mass for pitch back and 85 cm anterior for pitch forward. Subjects were held within the body cradle of the pitch-roll device by means of a four-prong head clamp, a form-fitting Velcro jacket, pads, and straps. Each subject was secured in the test apparatus with attention to avoiding protruding pressure points and ensuring comfort. The yaw axis bed rotated recumbent subjects about their spinal axis (cf. Fig. 1b). Recumbent yaw angles of ±80 in 20 divisions were used. Restraints in the recumbent device included a breastplate, a form-fitting, hard-foam head holder, and individually adjusted leg, hip, and shoulder restraints. A Head alignment +Yaw +Pitch +Roll B PITCH BKW(-) FWD(+) For roll tilts, subjects fit into the device with their head in a natural upright position, which we defined as 0 roll. We did not attempt to measure the horizontality of the inter-pupillary line. For tilts in recumbent yaw, the Polhemus sensor signal value was offset to zero with the bed in the nominal 0 or horizontal supine position. For tilts in pitch, the subject was restrained in what felt like a natural upright head posture. We then measured the angle of the Frankfort plane (DeBeer 1947) between the ‘‘lower border of the eye socket and the meatus of the ear’’ (Pozzo et al. 1990) with a protractor, for each subject. We considered the head to be upright when the Frankfort plane was pitched up 30 and we offset each subject’s Polhemus readings so that 0 would signify this definition of the upright. Head position fluctuations were minimal, circa 1, in all axes. Task ROLL RED(+) LED(-) RECUMBENT YAW LED(+) RED(-) Fig. 1 a Sign convention and body-fixed reference frame used. b The different tilt conditions tested. The subject used the illustrated rod to point to the perceived gravitational vertical (haptically indicated vertical). The crosses represent the body rotation axes; the indicator rod always rotated about an axis through its center, parallel to the body rotation axis. Forward pitch is positive, rightear-down roll is positive, and left-ear-down recumbent yaw is positive. The abbreviations are as follows: backward (BKW), forward (FWD), left ear down (LED), and right ear down (RED) Each tested angle was presented three times in a random order yielding three data points per tilt angle per tested axis per subject. Although device orientations were manually set according to protractor readings, the subject’s head angles were the dependent variable of interest. Orientation of the head and of the indicator rod were measured relative to a room-fixed frame of reference with a Polhemus 3SPACE device. Sensors were mounted on the head and indicator rod. Metallic objects can distort the room-fixed reference magnetic field generated by the Polhemus device, but we used a protractor to calibrate the Polhemus to within 0.5 accuracy. The following procedures describe our conventions for reporting head angle. At each test orientation, the experimenter asked the blindfolded subject to align (‘‘point to the vertical’’) the pivoting instrumented rod (8·1·1/2 in., gravity-neutral probe) with what he/she thought was the gravitational vertical (haptically indicated vertical). The rod pivoted about an axis parallel to the tilt axis of the device and was symmetrically balanced to avoid gravitational torques being generated as a function of tilt position. The rod was positioned so that the subject could manipulate it using the tips of the fingers of both hands to make the judgment. After reorientation to a new tilt position, the subject was instructed to rotate the rod from side to side (‘‘turn it side-to-side’’) before indicating the perceived vertical. At least 20–30 s elapsed at each tilt position before the subject performed the pointing task. This interim was long enough for the transient response of the semi-circular canals to decay substantially and for the subject to make a definitive determination. After recording the Polhemus measurement of rod orientation, the experimenter asked the subject to report verbally his/ her perceived body orientation in degrees of tilt from the vertical (verbal report of self tilt). This report was manually recorded. Subjects did not have any difficulty in performing the tasks. Each test period (roll, pitch, or recumbent yaw) lasted approximately 40 min. The presentation order of the body tilts was randomized for each of the test axes. The different axes were tested on separate days. Data reduction We define haptically indicated body tilt as the difference between head angle and rod angle when the subject was indicating the vertical with the rod. Verbally reported tilt was supplied directly by subjects. In addition, we define the errors in haptically indicated tilts and in verbally reported tilts as follows (see Fig. 2): ERRORROD ¼ haptically indicated tilt physical head tilt; ð1Þ ERRORVERBAL ¼ verbally reported tilt physical head tilt: ð2Þ Figure 1 illustrates the sign conventions used in Eqs. 1 and 2. The interpretation of the calculated errors is as follows: If the subject using the rod indicated the vertical on the opposite side of the gravity vector with respect to the actual body orientation, we assumed that he/she felt more tilted than actually was the case (cf. also Howard and Templeton 1966). If the subject indicated the vertical on the same side of his/her body tilt with respect to gravity, we assumed that he/she felt less tilted than was actually the case. Over-estimation of tilt is signified by positive errors for positive tilts and negative errors for negative tilts and vice versa for under-estimation. For the roll and yaw conditions, head angles were equated to the Polhemus sensor readings and these values were uniformly within 1 of the prescribed tilt angles. For the pitch condition, small variations in the A Results HAPTIC g error (+) head tilt (+) indicated vertical (-) indicated tilt (+) B VERBAL g head tilt (+) reported tilt (+) positions subjects chose their head to be constrained in led to between-subjects variations in measured head position relative to the goal orientations. (Such differences usually exist in experiments involving body tilt with respect to gravity but are generally ignored during data presentation and analysis.) Because we wanted to compare subjects across precisely the same physical head tilt angles, i.e. the Frankfort plane angles, we interpolated the haptic indications and verbal reports of the subjects to the prescribed angles (100, 90, 60, 30, 0, 10, +10, +30, +50, +80, +110, +130). Before this correction, the seven subjects in the pitch conditions had discrepancies between prescribed and actual angle of 1, 2, 0, 4, 0, 0, and 4 for pitch back, and discrepancies of 1, 1, 1, 4, 1, 4, and 2 for pitch forward. Thus, for example, if the desired physical position of the subject’s head was 10 pitch forward with respect to gravity (i.e. the desired Frankfort plane tilt was 20 backward with respect to horizontal), but the actual head orientation during testing resulted in 11 pitch forward (1 discrepancy), the subject’s haptic and verbal reports were linearly interpolated to expected 10 values. error (+) Fig. 2 a Diagram, for the case of roll tilt, of quantities involved in the calculation of the errors of the haptically indicated tilt. b Diagram of quantities involved in the calculation of the errors of the verbally reported self tilt. The interpretation of errors is as follows: If the subject using the rod indicated the vertical on the opposite side of the gravity vector with respect to the actual body orientation, we assumed that he/she felt more tilted than actually was the case. If the subject indicated the vertical on the same side of his/her body tilt with respect to gravity, we assumed that he/she felt less tilted than was actually the case. Over-estimation of tilt is signified by positive errors for positive tilts and negative errors for negative tilts and vice versa for under-estimation The results for the three different axes are presented in Fig. 3 plotted in terms of head tilt with respect to gravity and the associated haptically indicated and verbally reported self tilts with respect to the upright. The haptically indicated tilt represents the angle between the haptically indicated vertical and the subject’s z-axis (see Fig. 2). Each point in Fig. 3 represents the average of the three judgments each subject made at each head tilt. Different symbols are used for different subjects in the pitch and roll conditions. There were too many subjects in the recumbent yaw condition to differentiate with different symbols. For statistical analysis of our data, we used median scores across subjects for each head tilt angle in pitch, roll, and recumbent yaw, because it is a conservative estimate of central tendency in relatively small samples. Table 2 reports the linear, bivariate relationships of haptically indicated and verbally reported tilt (medians) with the physical head tilt. The linear fits accounted for most of the variance, with r2 values approximately unity. The slopes of the regression lines are very close to but nevertheless significantly different from unity, or ideal performance (P<0.05). The slopes of the pitch and yaw haptic and verbal tilt indications were significantly less than ideal, and the slopes of the roll estimates were greater than ideal. In each tilt axis condition, the slope and y-intercept of the regression lines for the three subjects who overlapped in all conditions were not significantly different from those of the other subjects in that condition, however, the power of these tests was low, less than 20%. HAPTICALLY INDICATED TILT N=7 PITCH [°] 100 VERBALLY REPORTED TILT 100 50 50 0 0 -50 -50 -100 -100 BKW -100 0 -50 100 FWD 50 BKW -100 -50 0 50 100 FWD N=6 ROLL [°] Fig. 3 Plots of haptically estimated tilt and verbally reported tilt of all subjects at the tested head angles. Each data point is the average of three repetitions for one subject. Different subjects are discriminated by different symbols in the pitch (N=7) and roll (N=6) conditions, but this was not practical for recumbent yaw (N=25). Solid lines represent the perfect response. Figures 1 and 2 illustrate the definitions of the angles plotted here 50 50 0 0 -50 -50 0 RECUMBENT YAW [°] LED -50 50 RED LED -50 0 50 RED RED -50 0 50 LED N=25 50 50 0 0 -50 -50 RED -50 0 50 LED PHYSICAL HEAD TILT [°] Table 2 also reports the RMS values of the median haptic indication and verbal report errors with respect to the perfect or ideal response. These values are small; consequently, in order to make our analysis more discriminative, we chose to work with error values (see Eqs. 1, 2). We attempted to fit the median error patterns for each individual axis with linear and quadratic functions of body tilt. The quadratic terms increased the variance accounted for by a mere 1–6%, and the quadratic coefficients were not significantly different from zero for any axis. Therefore, we describe the median error patterns for each axis in terms of their linear relationship to PHYSICAL HEAD TILT [°] body tilt in that axis. The companion paper develops a more complex, non-linear equation which is necessary to fit the full tri-axial data set. Pitch Figure 4, upper panel shows the median error values of haptically indicated tilts and of verbally reported self tilts in pitch relative to actual tilt. The haptically indicated tilt errors show a trend for subjects to indicate themselves as less tilted than they actually were. Within the tested head range of 100 to +130, the magnitude Table 2 Relationship of actual head tilt to median indicated tilt Pitch Roll Recumbent yaw Linear relationship with physical head tilt Indicated tilt (haptic) b=0.98 r2=1.00 Reported tilt (verbal) b=1.08 r2=0.99 b=1.08 r2=1.00 b=1.06 r2=0.99 b=0.92 r2=0.99 b=0.93 r2=0.99 RMS error with respect to physical head tilt Indicated tilt (haptic) 2.0 Reported tilt (verbal) 9.5 7.5 7.3 5.1 4.5 The first two rows report the slope (b) and the percent variance (r2) of perceived tilt accounted for by the linear relationship to actual tilt, and the bottom two rows report the RMS errors of indicated tilts relative to actual tilt of underestimation of pitch for haptic settings was a linear function of head pitch (r2=0.45; F(1,7)=7.4, P=0.024) with a shallow but negative slope, significantly different from zero (95% confidence interval= -0.018±0.015). We performed a regression analysis on the backward pitch and forward pitch error data separately and found statistically identical slopes. The pattern of errors for verbal reports differed from the haptic indication errors, with small overestimates for forward pitch in contrast to the underestimates produced by haptic indications. For small pitch back angles, true head tilt was verbally underestimated but overestimated for angles more negative than about 30. A straight line fit, across all head pitch angles, accounted for a significant portion of the variance in verbal report errors (r2=0.40; F(1,9)=5.9, P=0.04). A two-way, repeated measures ANOVA showed an interaction between head tilt and mode of indicating the vertical. Thus, the haptic indication and verbal report errors differed significantly (P<0.05) across tilt angles. Roll 0 FWD -20 INDICATED TILT overestimation MEDIAN ERROR [°] ROLL overestimation 20 BKW 20 MEDIAN ERROR [°] PITCH MEDIAN ERROR [°] The error patterns for the haptic and verbal judgments of roll tilt are plotted in Fig. 4, middle panel. The haptic errors show overestimations of the magnitude of head tilt across nearly all head tilt angles. The haptic overestimations increased as a linear function of head tilt 20 0 REPORTED TILT Both the haptic indications and verbal reports exhibited trends of underestimating recumbent yaw tilt relative to gravity. The error patterns are plotted in Fig. 4, bottom panel. The errors for the haptically indicated tilt were well fit by a straight line (r2=0.86; F(1,7)=47.01, P=0.0002) with a negative slope of 0.051±0.017 (95% confidence interval). The y-intercept of the line was not significantly different from zero, indicating that there was no overall bias in settings. The slopes of error versus head tilt for right ear down tilts versus left ear down tilts were not significantly different from each other, indicating that the haptic indications of tilt were symmetrical for left and right ear down tilts. By contrast, straight-line fits did not account for significant variance in the verbal reports. Nevertheless, a two-way, repeated measures ANOVA showed that the verbal report and the haptic indication patterns of errors were not significantly different (P>0.05) as a function of head tilt. Discussion LED RED overestimation overestimation 0 RED -20 Recumbent yaw overestimation -20 RECUMBENT YAW (r2=0.82; F(1,7)=30.8, P=0.001), with a positive slope of 0.085±0.036 (95% confidence interval). The slopes were not significantly different for left and right body tilts. The y-intercept of the function fitting haptic error versus body tilt was significantly negative (4.96±2.18, 95% confidence interval). The intercept of the median value of the haptic errors at 0 of head tilt was 4.3 with a 7.5 to 1.0 interquartile range. Verbally, subjects tended to underestimate tilts up to about ±60 and then overestimated for larger tilts. Straight-line fits did not account for significant variance in the verbal report errors. A two-way, repeated measurement ANOVA showed an interaction between head tilt and method for indicating the vertical. This means haptic errors and verbal report errors differed significantly (P<0.05) across tilt angles. LED overestimation -100 -50 0 50 100 PHYSICAL HEAD TILT [°] Fig. 4 Errors in haptic and verbal indications of self-tilt using conventions of Fig. 2. Medians and inter-quartile ranges are reported Our objective was to collect the orientation data necessary for developing and validating a comprehensive, tridimensional model of static body orientation. The present findings represent the first set of orientation judgments of the vertical measured with the same techniques for body tilt about all three primary axes, including for the first time systematic data on the recumbent yaw axis. We performed two types of comparisons of our data with data sets from other investigators collected with larger sample sizes and a variety of techniques for indicating the vertical. All of the other investigators published mean orientation values, so we computed mean values across subjects for our data for comparisons to these data (see Figs. 5a, 6a, 8a and bottom panels of Tables 3, 4). We also produced unbiased, symmetrized versions of our roll and yaw (but not pitch) error data. To do this, we added the y-intercept to the data so it would pass through the origin at zero head tilt, negated the error values associated with negative head tilts and averaged them with the values of comparable positive tilts, and then negated again the averages associated with negative tilts. This process was done for individual subjects, and, then we calculated median error values across subjects. We then compared our unbiased, symmetrized medians to the unbiased symmetrized means of several other investigators (see Figs. 5b, 6b, 8b and bottom panels of Tables 3, 4) Comparison with earlier studies: roll Bauermeister et al. (1964) had 60 subjects indicate the subjective vertical with a rod (similar to ours) from different roll tilt angles. Figure 5a plots the mean error patterns of Bauermeister et al.’s (1964) subjects with that of our subjects. The data in Fig. 5a are all means because Bauermeister et al.’s (1964) data are reported as mean values. The correlation analysis between our data and that of Bauermeister et al. (1964) yielded an r2 value of 0.92 (significant, P<0.05) showing the compatibility of the two data sets. In Fig. 5b, we have plotted Bauermeister et al.’s (1964) data in the form of symmetrized A ERROR [°] 20 Comparison with earlier studies: pitch 0 Figure 7 shows our haptic pitch error data plotted with data from Schöne (1964) who employed a visual indicator. Schöne (1964) used a more limited range of pitch angles compared to us but within that range, his mean data are within the inter-quartile ranges of our median data, and the two data sets are significantly correlated (P<0.05), with a r2 value of 0.5. Schöne’s (1964) visual indications also significantly correlate with our verbal report data (r2 =0.5; P<0.05). -20 Bauermeister, Means B Bortolami, Means 20 ERROR [°] means together with our symmetrized, unbiased haptic error data, which are medians across subjects. We correlated the two data sets and found an r2 value of 0.97 (significant, P<0.05). We ran an equivalent comparison with roll data from Miller et al. (1968) who had subjects indicate the vertical using a line of light. Figure 6a presents the means of errors of haptically indicated roll tilts for our data with those from Miller et al. (1968). The correlation was significant, r2=0.63. Figure 6b shows that the two symmetrized data sets (means for Miller et al. (1968) and medians for our data) virtually overlap for a ±70 range of roll, and are correlated with an r2 value of 0.99 in that range (significant, P<0.05). Beyond ±70 our error data plateau and Miller et al.’s (1968) decline sharply (the two traces are still significantly correlated over the full ±90 range, P<0.05, r2=0.51). The data of Bauermeister et al. (1964) also plateaus beyond about ±70 (see Fig. 5). Miller et al. (1968) also measured the ocular counterrolling exhibited by their subjects at the different roll tilts. We were able to fit their ocular counterrolling data with the function: 5.3 tan1(head tilt/22), with head tilt specified in degrees. Figure 6b also presents Miller et al.’s (1968) data ‘‘corrected’’ for the calculated eye counterrolling magnitude for each head tilt angle2. The correlation of our median data with their corrected mean roll data is very poor, r2=0.16. These patterns show that our haptic indications and Miller et al.’s (1968) visual settings of the vertical are fully compatible without any need to make a correction for ocular counterrolling. 0 Comparison with earlier studies: recumbent yaw -20 Bauemeister, Symmetrized means Bortolami, Symmetrized medians 0 -100 -50 LED PHYSICAL HEAD ROLL [°] 50 100 Only DiZio et al. (2001) had previously assessed recumbent yaw orientation with respect to gravity. Their study involved auditory localization judgments rather than judgments of the vertical or self tilt. Subjects were RED Fig. 5 a Comparison of our measures of haptically indicated roll tilt with those from Bauermeister et al. (1964), who tested 60 subjects with a comparable paradigm. Both data sets are expressed as mean values. The error bars are standard deviations. b The same data after being unbiased and symmetrized. The error bars are interquartile ranges 2 Colenbrander (1964) experimentally compared visual settings and counterrolling measurements during centrifugation and concluded that both were correlated to otolith output over a range of at least 60 of tilt (cf. also Van Beuzekom and Van Gisbergen 2000; Bohmer and Mast 1999; Bucher et al. 1992; Curthoys et al. 1990). A A 20 ERROR [°] ERROR [°] 20 0 0 -20 DiZio, Means Bortolami, Means -20 Miller, Means Bortolami, Means B 20 ERROR [°] B ERROR [°] 20 -20 0 DiZio, Symmetrized means Bortolami, Symmetrized medians -100 Miller, Symmetrized means -20 RED Miller, Corrected, symmetrized means Bortolami, Symmetrized medians -100 LED 0 -50 50 PHYSICAL HEAD ROLL [°] 100 RED Fig. 6 a Comparison of errors in haptically indicated roll orientation in our data with errors found using a visual indicator by Miller et al. (1968). Both data sets are mean values. The error bars are standard deviations. b Comparisons with Miller et al. (1968) using unbiased, symmetrized data. The error bars are interquartile ranges. The Miller et al. (1968) data are also presented corrected for ocular counterrolling asked to adjust a sound to the apparent midline of their head. Figure 8a plots the auditory error pattern for recumbent yaw of DiZio et al. (2001) together with our haptic indications of the vertical for recumbent yaw tilt. The data in Fig. 8a are means. In Fig. 8b, we have plotted symmetrized averages of the DiZio et al. (2001) data and our symmetrized median haptic indications. A 20 ERROR [°] 0 0 Schöne, Means Bortolami, Medians -20 -100 BKW -50 0 50 100 FWD PHYSICAL HEAD PITCH [°] Fig. 7 Plots of our haptic indication errors (medians and interquartile ranges) for pitch with those of Schöne (1964) obtained using a visual indicator. The correlation is significant (P<0.05) 0 -50 50 PHYSICAL HEAD YAW [°] 100 LED Fig. 8 a Errors in our haptic data for recumbent yaw are plotted with those of the auditory data from DiZio et al. (2001) for recumbent yaw. Both data sets are expressed in terms of mean values. The error bars are standard deviations. b Comparison of unbiased, symmetrized data. The error bars are interquartile ranges. All correlations are significant (P<0.05) correlation analysis of the untreated average data sets in Fig. 8a yielded an r2 value of 0.94 (P<0.05). The symmetrization in Fig. 8b also yielded a significant correlation (P<0.05) with an r2 value of 0.91. The correlation between our untreated data and unbiased, symmetrized data were extremely high, r2=0.98 (P<0.05). Cross-comparison of all data sets To capsulize the relationships between data sets acquired with different techniques, we ran independent correlation analyses between all pairs of untreated (nonsymmetrized means) data sets, for each tested axis. Tables 3 and 4, top panels, show the results for roll and yaw, respectively. The same analysis was repeated using our symmetrized median data (haptic-indication and verbal report errors) and the symmetrized mean data from the literature, see Tables 3 and 4, bottom panels. The linear trends within our data and comparisons of our data to data in the literature indicate that the roll and yaw axis data have symmetrical natures, with equal slopes in the positive and negative tilt directions, and zero error at zero head tilt. Enough subjects were tested in the yaw condition for a high level of statistical confidence in this pattern in the raw data. The artificially unbiased, symmetrized yaw data were almost perfectly correlated with the inherently unbiased, symmetrical large sample of raw yaw data. Large roll data sets in the literature (Bauermeister et al. 1964; Miller et al. 1968) demonstrate the inherently unbiased, symmetrical nature of orientation for this axis. Our raw haptic estimates Table 3 Top panel: correlation coefficients (r2) of the relationships between our data (cited as Bortolami et al. 2006) and other data sets for the roll axis. Bottom panel: the same analysis using the unbiased, symmetrized versions of the data Untreated error data Bortolami et al. (2006), haptic Bauermeister et al. (1964), haptic Miller et al. (1968), visual Bauermeister et al. (1964), haptic r2=0.92 Miller et al. (1968), visuala r2=0.63 r2=0.66 Bortolami et al. (2006), verbal r2=0.10 r2=0.004 r2=0.15 Bauermeister et al. (1964), haptic r2=0.97 Miller et al. (1968), visuala r2=0.51 r2=0.68 Bortolami et al. (2006), verbal r2=0.10 r2=0.04 r2=0.10 Symmetrized error data Bortolami et al. (2006), haptic Bauermeister et al. (1964), haptic Miller et al. (1968), visual All correlations among haptic and visual indications are significant (P<0.05, bold). All correlations between haptic indications and verbal reports and between visual indications and verbal reports are not significant (P>0.05) Not corrected for ocular counterrolling a Table 4 Top panel: correlation (r2) of data sets for the recumbent yaw axis. Bottom panel: the same analysis repeated using the unbiased, symmetrized version of the data Untreated error data Bortolami et al. (2006), haptic DiZio et al. (2001), auditory DiZio et al. (2001), auditory r2=0.94 Bortolami et al. (2006), verbal r2=0.17 r2=0.32 DiZio et al. (2001), auditory r2=0.91 Bortolami et al. (2006), verbal r2=0.18 r2=0.27 Symmetrized error data Bortolami et al. (2006), haptic DiZio et al. (2001), auditory All correlations among haptic and auditory indications are significant (P<0.05, bold). All correlations between haptic indication and verbal reports and between auditory indications and verbal reports are not significant (P>0.05) of roll tilt are in accord with this, except for a slight rightward bias, which we attribute to sampling error because the subject sample we tested was relatively small. The process of unbiasing and symmetrizing our data brought it into line with the large published data set for haptic and visual indications of roll tilt. Asymmetries and zero biases should be considered essential features of pitch data, because during exposure to different pitch body tilts across 1 g and hyper-g force backgrounds, judgments of the subjective horizon reflect about a head tilt of 30 (Correia et al. 1968; Schöne 1964), and zero biases exist in judgments of pitch axis orientation (MacDougall 1906). This may be related to the 30 pitched back orientation of the saccular and utricular maculae relative to the head (Rosenhal 1972). Our untreated pitch data are not inconsistent with this, because the confidence intervals about the regression line of indicated tilt error versus head tilt include zero for head pitch angles of 10 pitch back to 30 pitch forward. Our verbal report data showed less association with our physical indicator data, a pattern that has also been seen by other investigators. Similar dissociations of perceptual and manual performance occur when subjects experience mislocalizations of visual targets or distortions of their size, yet point or adjust grasp reasonably accurately (Glover 2002; Goodale et al. 1986). Psychophysical measurements like the ones discussed in this paper are influenced by many factors and often have high spread. Conclusion Our data generated using haptic indication of the gravitational vertical correlated extremely well with data obtained by other investigators using haptic, auditory, and visual methods. This suggests that such settings would be appropriate ‘‘system variables’’ for development of an orientation model, because they are reproducible across experiments and techniques. The compatibility is optimized if we remove the zero bias and symmetrize our roll and yaw data but leave our pitch data untreated. Such axis-by-axis description of the linear trends in the data does not obscure non-linearities which are important for development of the full tri-axial model of human vestibular-somatosensory static spatial orientation mechanisms which is presented in the companion paper (Bortolami et al. 2006). Acknowledgements This research has been supported by AFSOR grant F49620110171 and NASA grant NAG9-1483. We thank Dr. Simone Rocca and Dr. Sebastiano Daros for their contributions and experimental help. References Bauermeister M, Werner H, Wapner S (1964) The effect of body tilt on tactual-kinesthetic perception of verticality. Am J Psychol 77:451–456 Benson AJ, Barnes GR (1970) Responses to rotating linear acceleration vectors considered in relation to a model of the otolith organs. In: The role of the vestibular organs in space exploration, NASA SP-314, pp 222–236 Betts GA, Curthoys IS (1998) Visually perceived vertical and visually perceived horizontal are not orthogonal. Vis Res 38:1989–1999 Bohmer A, Mast F (1999) Assessing otolith function by the subjective visual vertical. Ann NY Acad Sci 871:221–231 Bortolami SB, Rocca S, Daros S, DiZio P, Lackner JR (2006) Mechanisms of human static spatial orientation. Exp Brain Res. DOI 10.1007/s00221-006-0387-9 (current issue) Bourdon B (1906) Influence de la force centrifuge sur la pereption de la verticale. (Influence of centrifugal force on the perception of the vertical.). Annee Psychol 12:84–94 Bucher UJ, Mast F, Bischof N (1992) An analysis of ocular counterrolling in response to body positions in three-dimensional space. J Vest Res 2:213–220 Citek K, Ebenholtz SM (1996) Vertical and horizontal eye displacement during static pitch and roll postures. J Vest Res 6:213–228 Clark B, Graybiel A (1962) Visual perception of the horizontal during prolonged exposure to radial acceleration on a centrifuge. J Exp Psychol 63:294–301 Clement G, Moore ST, Raphan T, Cohen B (2003) Perception of tilt (somatogravic illusion) in response to sustained linear acceleration during space flight. Springer, Berlin Heidelberg New York, pp 1–9 Colenbrander A (1964) Eye and otoliths. Aeromed Acta 9:45–91 Correia MJ, Hixson WC, Niven JI (1968) On predictive equations for subjective judgments of vertical and horizon in a force field. Acta Otolaryngol Suppl 230:1–20 Curthoys IS, Dai MJ, Halmagyi GM (1990) Human otolithic function before and after unilateral vestibular neurectomy. J Vest Res 1:199–209 De Beer GR (1947) How animals hold their heads. Proc Linn Soc Lond 159:125–139 DiZio P, Held R, Lackner JR, Shinn-Cunningham B, Durlach N (2001) Gravitoinertial force magnitude and direction influence head-centric auditory localization. J Neurophysiol 85:2455– 2460 Glasauer S, Mittelstaedt H (1997) Perception of spatial orientation in different g-levels. J Gravit Physiol 4:5–8 Glover S (2002) Visual illusions affect planning but not control. Trends Cogn Sci 6:271–315 Goodale MA, Pelisson D, Prablanc C (1986) Large adjustments in visually guided reaching do not depend on vision of the hand or perception of target displacement. Nature 320:745–750 Howard IP, Templeton (1966) Human spatial orientation. Wiley, New York, pp 488–496 Kaptein RG, Van Gisbergen JA (2004) Interpretation of a discontinuity in the sense of verticality at large body tilt. J Neurophysiol 91:2205–2214 MacDougall R (1906) The subjective horizon. Psych Rev 4:145–166 Mast F, Jarchow T (1996) Perceived body position and the visual horizontal. Brain Res Bull 40:393–397 Mast FW, Newby NJ, Young LR (2002) Sensorimotor aspects of high-speed artificial gravity: II. The effect of head position on illusory self motion. J Vest Res 12:283–289 Miller EF, Graybiel A (1962) Counterrolling of the human eyes produced by head tilt with respect to gravity. Acta Otolaryngol 54:479–501 Miller EF, Fregly A, Graybiel A (1968) Visual horizontal perception in relation to otolith-function. Am J Psychol LXXXI:488– 496 Mittelstaedt H (1983) A new solution to the problem of the subjective vertical. Naturwissenschaften 70:272–281 Mittelstaedt H (1992) Somatic versus vestibular gravity reception in man. Ann NY Acad Sci 656:124–139 Pozzo T, Berthoz A, Lefort L (1990) Head stabilization during various locomotor tasks in humans I. Normal subjects. Exp Brain Res 82:97–106 Rosenhal U (1972) Vestibular macular mapping in man. Ann Otol Rhnol Laryngol 81:339–351 Schöne H (1964) On the role of gravity in human spatial orientation. Aerosp Med 35:764–772 Van Beuzekom AD, Van Gisbergen JA (2000) Properties of the internal representation of gravity inferred from spatial-direction and body-tilt estimates. J Neurophysiol 84:11–27