Congenitally Blind Individuals Rapidly Adapt to Coriolis Force
advertisement

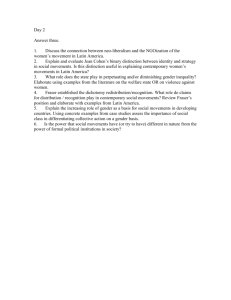
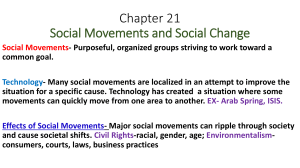
RAPID COMMUNICATION Congenitally Blind Individuals Rapidly Adapt to Coriolis Force Perturbations of Their Reaching Movements PAUL DIZIO AND JAMES R. LACKNER Ashton Graybiel Spatial Orientation Laboratory and Volen Center for Complex Systems, Brandeis University, Waltham, Massachusetts 02454-9110 Received 19 April 2000; accepted in final form 6 June 2000 DiZio, Paul and James R. Lackner. Congenitally blind individuals rapidly adapt to Coriolis force perturbations of their reaching movements. J Neurophysiol 84: 2175–2180, 2000. Reaching movements made to visual targets in a rotating room are initially deviated in path and endpoint in the direction of transient Coriolis forces generated by the motion of the arm relative to the rotating environment. With additional reaches, movements become progressively straighter and more accurate. Such adaptation can occur even in the absence of visual feedback about movement progression or terminus. Here we examined whether congenitally blind and sighted subjects without visual feedback would demonstrate adaptation to Coriolis forces when they pointed to a haptically specified target location. Subjects were tested pre-, per-, and postrotation at 10 rpm counterclockwise. Reaching to straight ahead targets prerotation, both groups exhibited slightly curved paths. Per-rotation, both groups showed large initial deviations of movement path and curvature but within 12 reaches on average had returned to prerotation curvature levels and endpoints. Postrotation, both groups showed mirror image patterns of curvature and endpoint to the per-rotation pattern. The groups did not differ significantly on any of the performance measures. These results provide compelling evidence that motor adaptation to Coriolis perturbations can be achieved on the basis of proprioceptive, somatosensory, and motor information in the complete absence of visual experience. Reaching movements to visual targets are generally relatively straight (Morasso 1981). However, the paths of reaches made to visual targets during constant velocity rotation in a fully enclosed slow rotation room (SRR) are curved, and the endpoints are displaced relative to the targets in the direction opposite rotation. The curvature and endpoint errors are the result of inertial Coriolis forces generated by the movement of the arm relative to the rotating environment (Lackner and DiZio 1988, 1994). Figure 1 illustrates the experimental situation. If additional reaches to visual targets are made during rotation, the movement paths become straighter and the endpoints more accurate. This improved performance occurs even if subjects are denied visual feedback about the paths of their movements, although adaptation occurs with about half as many movements if continuous visual feedback is permitted. Several studies have identified the importance of vision in affecting both the path and accuracy of goal-directed arm movements. Desmurget et al. (1997) have demonstrated that sight of the pointing hand prior to movement initiation enhances the accuracy of target attainment with that hand. Miall and Haggard (1995) and Sergio and Scott (1998) have shown that the reaching movements of blind subjects and of blindfolded, sighted subjects to haptically specified targets are more curved than movements made by the sighted subjects to the same target positions under visual guidance. Wolpert et al. (1994) and Flanagan and Rao (1995) have provided evidence underscoring, respectively, how visual misperception of curvature can affect the path of movements and how visual feedback about hand or joint space influences whether hand or joint trajectory is linearized. Yet other studies have highlighted vision as being the “distal teacher” used to update internal models of self and environment (e.g., Jordan 1995; Jordan and Rummelhart 1992; Kawato and Gomi 1992; Miall and Wolpert 1996; Wolpert 1997; Wolpert and Kawato 1998). Vision also figures prominently as the feedback source for updating motor control when a mechanical manipulandum that controls the position of a visual cursor is sytematically perturbed as subjects attempt to bring the cursor in register with visual targets (Shadmehr et al. 1993). Desmurget et al. (1999) using trans-cranial magnetic stimulation have very recently found evidence that the posterior parietal cortex (PPC) figures importantly in the planning and updating of reaching movements to visual targets. In their view, PPC computes both a forward model of instantaneous hand location and a dynamic motor error signal indicating the difference between ongoing hand position and visual target location. These various studies raise the possibility that subjects in the SRR experiments who point to the locations of just extinguished visual targets may show adaptive changes in reaching behavior that are contingent on visual experience. The visual target present before movement onset is clearly involved in the motor planning of the reaching movement, and a dynamic error signal may be maintained of the position of the hand relative to the target position even though the visual target is extinguished with the onset of the movement. This would be consistent with the role of PPC proposed by Desmurget et al. (1999), and with a large body of evidence implicating vision in the calibration of proprioception and in the adaptive process (Ghilardi et al. 1995; Helms-Tillery et al. 1991; Sainburg et al. 1993, 1995; Address for reprint requests: P. DiZio or J. R. Lackner, Graybiel Lab, MS 033, Brandeis University, 415 South St., Waltham, MA 02454 (E-mail: dizio@brandeis.edu or lackner@brandeis.edu). The costs of publication of this article were defrayed in part by the payment of page charges. The article must therefore be hereby marked ‘‘advertisement’’ in accordance with 18 U.S.C. Section 1734 solely to indicate this fact. INTRODUCTION www.jn.physiology.org 0022-3077/00 $5.00 Copyright © 2000 The American Physiological Society 2175 2176 P. DIZIO AND J. R. LACKNER ensured that there were no significant unusual forces acting on the subject’s arm or on his vestibular system at the beginning or end of a reaching movement. A contoured headrest was used to stabilize the subject’s head. A smooth horizontal Plexiglas surface extended in front of the subject at waist level. A subject’s reaching movements started and ended with contact with this surface. A WATSMART motion analysis system was used to record the path and endpoint of each movement by tracking an infrared emitter taped to the tip of the index finger of the pointing, right hand. Sampling rate was 100 Hz. Figure 1 illustrates the test situation. Procedure FIG. 1. Illustration of apparatus and testing paradigm. Subjects sat with their hand in the start position at the center of the 6.7 m diam enclosed room. The experimenter defined a “target” 35 cm ahead in the body midline by placing the subject’s hand there (sighted subjects blindfolded). All subjects reached for the target 40 times before, during, and after 60°/s counterclockwise (CCW) rotation. During rotation, forward reaching movements (v) generated rightward Coriolis forces (Fcor). A WATSMART video system monitored fingertip position. Vindras et al. 1998). It also would be consistent with a large body of evidence implicating visual and motor imagery in performance enhancement (Crammond 1997). It is also conceivable that the presence of a visual target affects the accuracy of arm position registration. Ghez and Sainburg (1995) have shown that improvements in movement performance attained through visual feedback transfer to nonpracticed directions when subsequent movements are made visually open-loop. The performance enhancement is present for normal subjects and patients without limb proprioception. Ghez and Sainburg make the important proposal that subjects are acquiring a general rule that becomes part of an internal model of limb dynamics rather than a specific movement pattern. To determine whether subjects can adapt to Coriolis force perturbations of their reaching movements in the absence of vision, we tested two groups of subjects. One group consisted of congenitally blind subjects who had never experienced light sensations. The other group included normal sighted subjects who were in total darkness during testing. Our approach was to have the blind and control subjects reach to a haptically specified goal position on a surface in front of them before, during, and after exposure to constant velocity rotation in the SRR. METHODS Subjects Five congenitally blind subjects who had never experienced light sensations participated after giving informed consent to the experimental protocol. They ranged in age from 19 to 44 yr old (see Table 1). In addition, five normally sighted individuals of comparable ages participated as a control group. All were healthy and physically active, and all were right-handed. They were tested in total darkness. None of the subjects was familiar with the goals of the experiment nor had had previous experience in rotating environments. Each test session included pre-, per-, and postrotation reaches, always with the right hand. The sighted, control subjects were brought into the test chamber with their eyes closed and were kept in total darkness throughout the experiment. The subjects started each reach from a microswitch on the Plexiglas surface near their midline. The experimenter gave the subject a “target” to point to by moving the subject’s hand to a position on the surface 35 cm forward of the “start button” in the midline. This position was demonstrated several times until the subject felt comfortable in localizing the desired target position. The surface was smooth so that there were no distinctive texture cues about the desired target position available from finger contact. Each subject made 40 prerotation, 40 per-rotation, and 40 postrotation reaches. The subjects were instructed to reach at a natural, comfortable rate lifting their finger and reaching forward to touch down on the surface at the target location in one continuous smooth movement. They were told to correct their reaching movement if they felt they were making an error but not to stop their movement to do so. On completion of each reach they held their finger in place for about 1 s, raised it, and slowly brought it back to the start button. When the 40 prerotation movements were completed, the SRR was accelerated to a constant velocity of 60°/s counterclockwise (CCW) at 1°/s2. After 2 min at constant velocity, the per-rotation movements were made. Following completion of the per-rotation reaches, the room was decelerated to rest at 1°/s2. After a 2-min interval, the postrotation movements were made. Throughout the experiment, when the subjects were not making movements to the “target,” they avoided making any head or arm movements. The subjects were asked after each set of eight reaching movements whether they felt any sense of rotation. All of the subjects indicated that they always felt completely stationary during the testing periods. Data analysis A computer algorithm determined the end position and duration of each reaching movement. The end corresponded to the location where movement velocity fell below 3% of peak velocity. The maximum deviation of the movement path from a straight line connecting the movement start and end position was calculated and used as an index of path curvature. Each subject’s final eight prerotation reaches were TABLE 1. Characteristics of blind subjects Subject Age Gender Etiology JB 24 F MB VD 24 44 M F MP BM 19 44 M M Agricultural pesticide during first 3 mo gestation Probable Usher’s Syndrome* Retinopthy of prematurity, with secondary glaucoma and subsequent enucleation Leber’s congenital amaurosis† Retinopthy of prematurity Apparatus The experiment was conducted in the Graybiel Laboratory SRR, a fully enclosed chamber 6.7 m diam. The subject was seated in a chair located over the center of rotation so that the start position of his or her right hand corresponded to the center of rotation. This positioning * Hereditary form of retinitis pigmentosa and sensorineural deafness. † Hereditary form of retrobulbar, optic neuritis. CONGENITALLY BLIND SUBJECTS ADAPT TO CORIOLIS FORCE TABLE 2177 2. Reaching performance by blind and sighted subjects Blindfolded Prerotation, baseline Trajectory curvature, mm* Lateral endpoint, mm† Distance, mm Peak velocity, mm/s Duration, ms ⫺16 ⫾ 4.7 Blind Per-rotation, initial Per-rotation, final Postrotation, initial 17 ⫾ 9.0 ⫺12 ⫾ 5.6 ⫺33 ⫾ 9.3 Prerotation, baseline ⫺19 ⫾ 6.1 Per-rotation, initial Per-rotation, final Postrotation, initial 8 ⫾ 12.8 ⫺16 ⫾ 10.3 ⫺41 ⫾ 11.5 44 ⫾ 14.3 331 ⫾ 24.1 34 ⫾ 19.5 304 ⫾ 19.6 ⫺4 ⫾ 13.4 363 ⫾ 24.6 40 ⫾ 15.4 359 ⫾ 16.6 0 ⫾ 12.9 366 ⫾ 18.5 ⫺18 ⫾ 13.3 369 ⫾ 13.6 43 ⫾ 14.2 322 ⫾ 22.7 78 ⫾ 12.3 296 ⫾ 15.8 1,324 ⫾ 99.1 612 ⫾ 116.6 1,309 ⫾ 77.0 619 ⫾ 110.8 1,267 ⫾ 100.6 652 ⫾ 84.3 1,211 ⫾ 85.4 644 ⫾ 83.9 1,085 ⫾ 74.5 592 ⫾ 100.4 1,084 ⫾ 85.2 599 ⫾ 134.0 1,222 ⫾ 84.2 575 ⫾ 90.4 988 ⫾ 119.2 585 ⫾ 74.7 Values are means ⫾ SD; there were 5 subjects per group. * Positive values indicate that the peak deviation of movement path is rightward of a straight line connecting the start and endpoint of a reach; negative values mean curvature to the left. † Positive values indicate endpoints to the right of midline; negative values to the left. averaged to serve as a baseline for comparison with per- and postrotation reaches. RESULTS The experimental results are summarized in Table 2 and presented graphically in Figs. 2 and 3. As can be seen, the pattern is one of per-rotary deviation of trajectory and endpoint with complete adaptation within about 10 reaches; mirror image aftereffects on cessation of rotation, and complete decay of aftereffects within 10 reaches. To quantify the rate of adaptation and readaptation, we computed for each subject the num- ber of movements required for the endpoint curvature deviations to diminish to 10% of their magnitudes in the initial perand postrotation reaches. The averages across subjects for both groups are presented in Table 3. We first describe below the patterns characteristic of the blindfolded control and the blind subject groups and then present a statistical analysis of the data. Prerotation reaches The normal control subjects and blind subjects reached in slightly curved paths (viewed from above). The average peak path deviation of the baseline reaches from a straight line was ⫺16 mm (left of midline) for the control subjects and ⫺19 mm for the five congenitally blind subjects. Movement endpoints were 43 mm right of the midsagittal plane for the blind subjects and 4 mm to the left for control subjects. Per-rotation reaches The initial per-rotation reaches of the normal control subjects deviated rightward paralleling the development of the rightward acting Coriolis forces and then inflected leftward as the Coriolis forces abated. The average peak curvature was ⫹17 mm, a change of 33 mm rightward. The average endpoint FIG. 2. Top view of average movement paths for blind and control subjects. Left: the initial per-rotation movements were curved and ended right of baseline, and the initial postrotation movements showed mirror-image deviations for both groups. Right: the final (40th) per- and postrotation movements overlapped the baseline path for both groups. FIG. 3. Average lateral endpoint deviation from baseline and trajectory curvature for all reaches for the blind and the control subjects. 2178 P. DIZIO AND J. R. LACKNER 3. Numbers of reaching movements blind subjects and blindfolded control subjects had to make to reacquire baseline performance after perturbation by introduction or removal of Coriolis forces TABLE Blindfolded Trajectory curvature Lateral endpoint Blind Per-rotation Postrotation Per-rotation Postrotation 11.8 ⫾ 4.95 11.6 ⫾ 4.32 7.5 ⫾ 3.66 7.3 ⫾ 3.28 7.4 ⫾ 3.31 9.2 ⫾ 4.14 6.4 ⫾ 3.67 10.2 ⫾ 9.28 Values are means ⫾ SD; there were 5 subjects per group. of these reaches, relative to prerotation baseline, was deviated 44 mm rightward, in the direction of the prior acting Coriolis force. With additional reaches, movement paths became straighter and endpoints more accurate, until after about 12 reaches the movement trajectories and endpoints were back to prerotation baseline values. The blind subjects’ initial per-rotation reaches were also deviated in the direction of the transient Coriolis forces. The average peak curvature was ⫹8 mm, a 27-mm rightward shift relative to baseline. The average movement endpoint was also displaced in the direction of the Coriolis force, 35 mm rightward of baseline value. With additional reaches, movement paths became more and more like those of the prerotation baseline reaches, and the endpoints of the movements also returned toward baseline values. After about eight or nine per-rotation reaches, movement trajectory curvatures and endpoints, respectively, were back to their prerotation baseline values. Postrotation reaches The initial postrotation reaches of the control subjects had movement paths mirror symmetric to the initial per-rotation reaches. The movements deviated leftward and then returned somewhat toward the midline but still ended significantly displaced leftward relative to the prerotation endpoint baseline. The average peak curvature was ⫺33 or 17 mm more leftward than baseline; the average endpoint was 14 mm left of prerotation baseline. As additional reaches were made, the movements gradually became straighter and more accurate, until after about seven reaches they were indistinguishable from baseline values. The blind subjects’ initial postrotation reaches also showed mirror symmetric changes in movement path, curving leftward in relation to initial per-rotation paths, returning rightward toward the end of the movement, and ending to the left of the target goal position. Average peak curvature was ⫺41 mm and average endpoint 11 mm left of baseline. After six additional reaches, movements returned to their characteristic prerotation baseline curvature, and after 10 regained baseline endpoint accuracy. In the prerotation period, the blind subjects had significantly different baseline endpoints (P ⫽ 0.021 in a t-test) from the controls, but the curvature of their movements was statistically indistinguishable. Our analysis focused on deviations from the prerotation baselines, which reflect the amplitudes of Coriolis force perturbations and adaptive compensations. An initial ANOVA showed that there was no difference between the subject groups in deviations from baseline of trajectory curva- ture, endpoint accuracy, or variability. Separate ANOVAs performed for each group showed significant (P ⬍ 0.001) endpoint and curvature differences across the baseline, initial and final per-rotation, and postrotation movements. The means of pairs of conditions were compared with Tukey post hoc tests with ␣ ⬍ 0.05 as the criterion for significant differences. Both groups showed significant differences between their prerotation baselines and their initial per-rotation reaches for both trajectory curvature and endpoint reflecting the influence of the transient Coriolis force perturbations. The initial and final per-rotation reaches within each group were also significantly different for curvature and endpoint indicating the acquisition of adaptation. The curvatures and endpoints of the final perrotation reaches were not different from prerotation baseline indicating complete adaptation. The initial postrotation reaches differed for each group from prerotation baselines, both for endpoint and curvature, reflecting the persistence of the adaptive compensations acquired during rotation. The final prerotation and final postrotation reaches were not different in either curvature or endpoint within the groups, indicating complete readaptation to the stationary environment. DISCUSSION In their prerotation baseline reaches, both subject groups pointed to the haptically specified target location in curvilinear paths, unlike subjects in our earlier experiments who had pointed to the location of just extinguished visual targets in essentially straight paths (cf. Lackner and DiZio 1994). The extent and direction of curvature exhibited by our subjects are directly comparable to that reported by Miall and Haggard (1995) and Sergio and Scott (1998) for their blind subjects and blindfolded, sighted subjects making comparable forward directed movements. Moreover, our blind and control subjects, like theirs, did not show significant intergroup differences in curvature for this movement direction. Our control subjects and our congenitally blind subjects exhibited comparable deviations of movement path and endpoint during their initial per-rotation reaches when they were first exposed to Coriolis forces. None of them had had prior experience making arm movements during passive constant velocity rotation, so they were not expecting their arm movements to elicit unusual forces. Many expressed surprise after their first movements and said their arm had not done what they had intended. With additional movements, both groups’ reaching movements became more and more similar in curvature and endpoint to their prerotation reaches. After about 10 additional per-rotation movements, each group was back at prerotation baseline values. Consequently, these findings demonstrate that adaptation to Coriolis force perturbations does not require visual specification of target position, visual feedback about movement path or endpoint, nor visual imagery about movement performance. Our congenitally blind subjects, for example, have never experienced visual sensations. Thus vision is sufficient but not necessary as a distal teacher for updating motor control. In ongoing studies, we have found that subjects allowed continuous sight of their arms during exposure to Coriolis forces achieve full adaptation with about 40% fewer movements than those tested in total darkness. This improvement is present at all rotational velocities tested, 5, 10, 15, and 20 rpm (Siino-Sears et al. 2000). It is consistent with CONGENITALLY BLIND SUBJECTS ADAPT TO CORIOLIS FORCE and supportive of Ghez and Sainburg’s proposal, discussed in the INTRODUCTION, that vision can update the internal model of limb dynamics in a general nonmovement specific fashion. The updating of internal models of inverse dynamics and expected regularities of the environment is manifest in our subjects’ initial postrotation reaches. These reaches have mirror image symmetry to their initial per-rotation reaches that were deviated by Coriolis forces. The nature of these aftereffects indicates that the nervous system has computed the Coriolis force “expected” for the movement being executed and has programmed a compensation appropriate to cancel the consequence of this force. Postrotation, this compensation is no longer appropriate, hence the pattern of aftereffects. However, both during constant velocity and postrotation, the subjects feel stationary. Consequently, they register the context as being the same [the issue of context specificity is further discussed in Cohn et al. (2000)]. Interestingly, during rotation after the subjects have adapted, they no longer feel the Coriolis forces generated by their movements. These forces become perceptually transparent, and their movements seem totally normal. By contrast, postrotation when subjects first make reaching movements, they report feeling a force deviating their arm. All subjects in all of our experiments on adaptation to Coriolis forces report this (cf. DiZio and Lackner 1995; Lackner and DiZio 1994). They are experiencing their CNS’s compensation for expected but absent Coriolis forces as an external force. Current models of movement control tend to place great emphasis on vision for updating movement control parameters. Our findings emphasize the importance of a cooperative interaction and interrelating of somatosensory, proprioceptive, and efferent signals, along with visual ones, in updating control. In fact, we know from other contexts that somatosensation and proprioception can be as important as vision in guiding motor control. For example, individuals without labyrinthine function cannot stand heel to toe for more than a few seconds without losing balance even when permitted sight of their surroundings. Nevertheless, they can stand in this posture indefinitely with eyes closed if they are permitted to touch a stable surface very lightly with their index fingertip (Lackner et al. 1999). The finger contact, although below force levels adequate to provide any mechanical stabilization, provides spatial cues about the direction of body sway. By minimizing the tiny force changes at the fingertip, body posture is “automatically” stabilized. In the present experimental situation, subjects had to rely on somatosensory and proprioceptive feedback for initially specifying the target position and later for controlling and adjusting their movements to achieve the target position. We have demonstrated recently that when the hand makes contact with a surface at the end of a reaching movement, the magnitude and direction of contact shear forces on the fingertip provide a spatial directional map of finger position relative to the body (DiZio et al. 1999). Each location on a surface is associated with a different pattern. These terminal landing cues allow endpoint adaptation to occur, but provide no information for adaptation of movement path, which has been shown to be dissociable from movement endpoint adaptation (DiZio and Lackner 1995). The unusual pattern of muscle spindle feedback associated with Coriolis perturbed movements provides information about unexpected movement curvature allowing adaptive modifications to be 2179 introduced (Lackner and DiZio 1994, 2000). The increase in spindle activity in the muscles stretched by the Coriolisinduced displacement of the arm over that appropriate for the movement intended signals the direction of deviation of the arm. The temporal pattern of this activity provides information about the curvature of the movement. These patterns allow the CNS to model the Coriolis force and gradually compensate for its presence in future movements. Thus fingertip cutaneous receptors and brachial mechanoreceptors are sufficient to specify target location, provide feedback about arm location and path, and possibly contribute to a spatial image of hand position. We thank E. Kaplan, V. Siino-Sears, and J. Ventura for technical assistance. We thank an anonymous reviewer for mentioning the possible importance of nonvisual spatial imagery. This research was supported by National Aeronautics and Space Administration Grants NAG9-1037 and NAG9-1038. REFERENCES COHN J, DIZIO P, AND LACKNER JR. Reaching during virtual rotation: contextspecific compensation for expected Coriolis forces. J Neurophysiol 83: 3230⫺3240, 2000. CRAMMOND DJ. Motor imagery: never in your wildest dreams. Trends Neurosci 20: 54 –57, 1997. DESMURGET M, EPSTEIN CM, TURNER RS, PRABLANC C, ALEXANDER GE, AND GRAFTON ST. Role of the posterior parietal cortex in updating reaching movements to a visual target. Nature Neurosci 2: 563–567, 1999. DESMURGET M, ROSSETTI Y, JORDAN M, MECKLER C, AND PRABLANC C. Viewing the hand prior to movement improves accuracy of pointing performed toward the unseen contralateral hand. Exp Brain Res 115: 180 –186, 1997. DIZIO P, LANDMAN N, AND LACKNER JR. Fingertip contact forces map reaching endpoint. Soc Neurosci Abstr 25: 760.15, 1999. DIZIO PA AND LACKNER JR. Motor adaptation to Coriolis force perturbations of reaching movements: endpoint but not trajectory adaptation transfer to the non-exposed arm. J Neurophysiol 74: 787–792, 1995. FLANAGAN JR AND RAO AK. Trajectory adaptation to a nonlinear visuomotor transformation: evidence of motion planning in visually perceived space. J Neurophysiol 74: 2174 –2178, 1995. GHEZ C AND SAINBURG R. Proprioceptive control of interjoint coordination. Can J Physiol Pharmacol 73: 273–284, 1995. GHILARDI MF, GORDON J, AND GHEZ C. Learning a visuomotor transformation in a local area of work space produces directional biases in other areas. J Neurophysiol 73: 2535–2539, 1995. HELMS-TILLERY S, FLANDERS M, AND SOECHTING J. A coordinate system for the synthesis of visual and kinesthetic information. J Neurosci 11: 770 –778, 1991. JORDAN MI. Computational aspects of motor control and motor learning. In: Handbook of Perception and Action: Motor Skills, edited by Heuer H and Keele S. New York: Academic, 1995, p. 71–120. JORDAN MI AND RUMMELHART DE. Forward models: supervised learning with a distal teacher. Cognit Sci 16: 307–354, 1992. KALASKA JF AND CRAMMOND DJ. Cerebral mechanisms of reaching movements. Science 255: 1517–1523, 1992. KALASKA JF, SCOTT SH, CISEK P, AND SERGIO LE. Cortical control of reaching movements. Curr Opin Neurobiol 7: 849 – 859, 1997. KAWATO M AND GOMI H. The cerebellum and VOR/OKR learning models. Trends Neurosci 5: 445– 453, 1992. LACKNER JR AND DIZIO P. Gravitational effects on nystagmus and on perception of orientation. Ann NY Acad Sci 545: 93–104, 1988. LACKNER JR AND DIZIO P. Aspects of body self-calibration. Trends Cognit Sci 4: 279⫺288, 2000. LACKNER JR, DIZIO P, JEKA J, HORAK F, KREBS D, AND RABIN E. Precision contact of the fingertip reduces postural sway of individuals with bilateral vestibular loss. Exp Brain Res 126: 459 – 466, 1999. LACKNER JR AND DIZIO PA. Rapid adaptation to Coriolis force perturbations of arm trajectory. J Neurophysiol 72: 299 –313, 1994. MIALL RC AND HAGGARD PN. The curvature of human arm movements in the absence of visual experience. Exp Brain Res 103: 421– 428, 1995. 2180 P. DIZIO AND J. R. LACKNER MIALL RC AND WOLPERT DM. Forward models for physiological motor control. Neural Networks 9: 1265–1279, 1996. MORASSO P. Spatial control of arm movements. Exp Brain Res 42: 223–227, 1981. SAINBURG R, GHILARDI MF, POIZNER H, AND GHEZ C. The control of limb dynamics in normal subjects and patients without proprioception. J Neurophysiol 73: 820 – 835, 1995. SAINBURG R, POIZNER H, AND GHEZ C. Loss of proprioception produces deficits in interjoint coordination. J Neurophysiol 70: 2136 –2147, 1993. SERGIO LE AND SCOTT SH. Hand and joint paths during pointing movements with and without vision. Exp Brain Res 122: 157–164, 1998. SHADMEHR R, MUSSA-IVALDI FA, AND BIZZI E. Postural force fields of the human arm and their role in generating multi-joint movements. J Neurosci 13: 45– 62, 1993. SIINO-SEARS V, DIZIO P, AND LACKNER JR. Rotation velocity influences the magnitude of deviations of arm reaching movements. Soc Neurosci Abstr. In press. VINDRAS P, DESMURGET M, PRABLANC C, AND VIVIANI P. Pointing errors reflect biases in the perception of initial limb position. J Neurophysiol 79: 3290 – 3294, 1998. WOLPERT DM. Computational approaches to motor control. Trends Cognit Sci 1: 209 –216, 1997. WOLPERT DM, GHAHRAMANI Z, AND JORDAN MI. Perceptual distortion contributes to the curvature of human reaching movements. Exp Brain Res 98: 153–156, 1994. WOLPERT DM AND KAWATO M. Multiple paired forward and inverse models for motor control. Neural Networks 11: 1317–1329, 1998.