Motor function in microgravity: movement ... James R Lackner 1 and Paul DiZio 2
advertisement

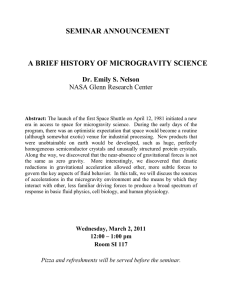
744 Motor function in microgravity: movement in weightlessness James R Lackner 1 and Paul DiZio 2 Microgravity provides unique, though experimentally challenging, opportunities to study motor control. A traditional research focus has been the effects of linear acceleration on vestibular responses to angular acceleration. Evidence is accumulating that the high-frequency vestibulo-ocular reflex (VOR) is not affected by transitions from a 1 g linear force field to microgravity (<1 g); however, it appears that the three-dimensional organization of the VOR is dependent on gravitoinertial force levels. Some of the observed effects of microgravity on head and arm movement control appear to depend on the previously undetected inputs of cervical and brachial proprioception, which change almost immediately in response to alterations in background force levels. Recent studies of post-flight disturbances of posture and locomotion are revealing sensorimotor mechanisms that adjust over periods ranging from hours to weeks. Addresses Ashton Graybiel Spatial Orientation Laboratory, Brandeis University, Waltham, Massachusetts 02954, USA le-rnail: lackner@binah.cc.brandeis.edu 2e-rnail: dizio@binah.cc.brandeis.edu Abbreviations CCS Coriolis cross-coupled stimulation g accelerationdue to gravity GIF gravitoinertialresultant force VOR vestibulo-ocularreflexes Current Opinion in Neurobiology 1996, 6:744-750 © Current Biology Ltd ISSN 0959-4388 Introduction Only a few systematic studies of movement control have been carried out in microgravity conditions. Here, we will briefly outline how microgravity is achieved and what factors need to be taken into account when conducting and interpreting microgravity movement studies. We also discuss observations on vestibulo-ocular and oculomotor function, eye-hand coordination, arm control, and posture in microgravity. A key emphasis of this review is that in microgravity, some adaptive changes in m o v e m e n t control occur extremely rapidly in responw to the changes in postural load that occur during fol~c changes. We will conclude by briefly discussing how inertial perturbations of movement trajectories can serve to discriminate among various theories of movement control. ' M i c r o g r a v i t y ' a n d h o w it is a c h i e v e d Parabolic flight and orbital space flight can generate weightless conditions of significant duration. T h e basic concept underlying weightlessness in parabolic flight is illustrated in Figure la. At the top of the parabola, there is a period of weightlessness or microgravity because the resultant of the lift, drag and thrust forces acting on the aircraft is effectively zero. In orbital space flight (see Figure lb), as the spacecraft moves forward, it is accelerated towards the earth by the force of gravity, causing it to move in a curvilinear path around the earth at a near constant altitude. Thus, in orbit, the spacecraft continuously 'falls' around the earth. Orbital velocity is inversely related to orbital elevation, being much greater for lower elevations. A spacecraft at an elevation of 22 300 miles and an orbital velocity of 1.9 miles s-1 has a period of revolution of 24h; therefore, it is geosynchronous and hovers above the same location on the earth. T h e important point to recognize is that neither in parabolic flight nor in orbital flight is there true microgravity (or the absence of an attraction force). Instead, there is a condition of free fall such that the sum of the mechanical contact forces acting on the occupants of the craft is effectively zero. Astronauts experience weightlessness in orbital flight because of the absence of external contact forces acting on their body, not because of an absence of gravity (g). In parabolic flight, the aircraft and pilot fall at the same rate under the influence of gravity, so they can only exert momentary unbalanced contact forces on each other. T h e otolith organs of the inner ear are unloaded in weightless conditions because the net, external contact force acting on the body is zero. This means that, except for voluntary or passively imposed head movements that will generate transient shear of the otolith membranes, the otoliths do not provide orientationally relevant signals in microgravity. Their resting discharge pattern will not be influenced by static head orientation; therefore, the static otolith-spinal and otolith-oculomotor influences that are normally present and that depend on head orientation relative to gravity are absent. T h e peripheral hydrodynamics of the semicircular canals are basically independent of linear acceleration and, therefore, are unaffected by weightless conditions [1]. To interpret experiments on m o v e m e n t control carried out in weightlessness, it is critical to realize the importance of contact forces acting on the body under normal terrestrial conditions. Einstein's equivalence principle states that no measuring device can distinguish between inertial and gravitational forces, nor, by extension, can any sensors of the body. It is the mechanical cor~tact forces on the feet that make posture and locomotion control possible in humans. T h e support surface resists the acceleratory force of gravity by providing an equal and opposite force that prevents downward acceleration. It is this resistive force acting on the feet that a scale measures as weight. Walking would not be possible except for the frictional resistance Motor function in microgravity: movement in weightlessness Lackner and DiZio ?45 Figure 1 Two means of generating microgravity. (a) Parabolic flight. In straight and level flight, the external forces of lift (L), drag (D) and thrust (T) resist the gravitational pull (mg) on the aircraft. Consequently, the aircraft maintains level flight. In parabolic flight, the sum of external forces is zero, so the aircraft and occupants fall at the same rate and are unable to exert sustained contact forces on each other. (b) Orbital space flight. Outside the earth's atmosphere, L and D are negligible, so no T is required to maintain orbital velocity; therefore, L + D + T - - O . As the spacecraft in orbital flight is not exposed to external contact forces, it cannot exert sustained contact forces on its occupants. © 1996 CurrentOpinion in Neurobiology 746 Neural control of the ground under the feet resisting the backward thrust force exerted during a forward step. Contact forces are also critical for other aspects of motor control. If a rightward head movement is made, the neck muscles exert a clockwise torque on the head, but they also exert a counter-clockwise torque on the torso. This latter torque is countered by the friction between the feet and the ground if the individual is standing. T h e same considerations apply to muscle torques generated by movements of the arms or other parts of the body. Platform divers use these reaction force couples to change their body orientation and configuration when moving through the air. Recognizing the role that contact forces play in allowing the movement of specific body parts without displacing the rest of the body is crucial for both constructing apparatus and designing interpretable experiments for microgravity conditions. Factors complicating the interpretation of microgravity experiments Before discussing individual experiments, it is useful to have in mind some of the advantages and disadvantages of using parabolic and orbital flight for studying movement control (summarized in Table 1). T h e primary advantage of parabolic flight is the ability to achieve microgravity within seconds. The primary disadvantage is the brief period available for carrying out experiments (approximately 20-30s per parabola), which often necessitates having to make many parabolas per flight (usually about 40) so as to achieve adequate experimental time. The weightless phases of the parabolas are separated by transitions to hypergravity (1.8-2.0g) steady state levels, which also last 20-25s. Most individuals rapidly adapt to these fluctuations in the force levels, both in terms of perception (i.e. how heavy they feel in the high-force periods [2,3]) and in terms of motor control v i s a vis locomotory movements made during greater than 0g gravitoinertial force levels [4,5]. Such rapid adaptation has to be taken into account when interpreting experimental results; for example, subjects who are allowed to practice movements or who are only tested after being passively exposed to many parabolas may be largely adapted to the new force level before thc collection of data begins. The main advantage of orbital flight is that it permits longer exposures to microgravity, ranging from days to months or even years. The disadvantages, in terms of experimental interpretation, include the long time between launch and both being in orbit and being able to participate in experiments. Astronauts and cosmonauts wear space suits for launch and have to get out of these suits when in orbit. In the US space shuttle program, it is necessary to unstow and set up the experimental apparatus after entering orbit. Adaptation of motor and 'postural' control to the 'zero g' environment is taking place during this time. Before participating in an orbital flight project, astronauts have to undergo extensive training in parabolic flight, so they are already experienced at operating in microgravity. It is usually several hours after entering orbit before experimental data can be collected. Moreover, in dedicated life sciences missions, each participating astronaut or cosmonaut is involved in many experiments that involve different apparatus. Setting up the experiments and conducting them can occupy virtually all of the astronauts' waking hours. Data collection periods for an individual experiment are usually very restricted and repeat testing with optimal spacing is not always possible. For example, the initial test might take place several hours after entering orbit, and the next test may only take place several days later; sometimes, the first test may not even take place during the first flight day. Many other factors potentially affect test results as well. For example, there is no hydrostatic pressure in a weightless environment. Consequently, there is a substantial rostral re-distribution of body fluids that commences upon entry into weightlessness. This re-distribution of fluids leads to a decrease in lower-body mass, especially in the legs, and an increase in blood and lymph perfusion of the upper body [6]. It is not certain whether this affects muscle viscosity and compliance. In addition, with continued exposure to weightlessness, muscle mass and strength diminish in response to the decreased load demands. Muscle fiber types may also undergo changes, with a shift toward fast, fatiguable response types [7,8°]. Moreover, approximately 70% of astronauts experience space motion sickness to some degree during the first three or four flight days [9]. T h e anti-motion sickness drugs that are commonly used to combat sickness, such as scopolamine and promethazine, have soporific effects. These factors, coupled with the many tests involved, can lead to chronic fatigue. Post-flight testing is also subject to a number of complications. Astronauts on shuttle flights generally are excited the 'night' before re-entry and have a hard time sleeping (the same is true before launch). After landing, before leaving the space shuttle, many astronauts intentionally move around to re-adapt themselves to 1 g so that they will be able to walk off the shuttle. This re-adaptation complicates the interpretation of post-flight assessments of posture, balance, and movement control. In addition, astronauts experience considerable fatigue post-flight, both because they have busy in-flight and post-flight schedules and because they have to re-adapt their bodies to a 1 g force level. Moreover, the post-flight tests (which are used to gather data for comparisons with the in-flight observations) also place great time and physical demands on the astronauts. In sum, many factors complicate the interpretation of in-flight and post-flight data. Ground-based mission simulations that precisely mimic in-flight and post-flight time lines and experimental protocols have not yet been developed. Such simulations are expensive and time Motor function in microgravity: movement in weightlessness Lackner and DiZio 747 Table 1 Experimental advantages and disadvantages of parabolic flight and orbital flight. Experimental factor Parabolic flight Orbital flight Duration of microgravity 20-30S (which limits test duration and and trial frequency) Days (which enables observation of long-term effects) Periodicity of microgravity Alternates between micro- and hypergravity about every 30 s (confounding factors include interactions between adjustments to force transitions and adjustments to Continuous microgravity (confounding factors include musculo-skeletal deconditioning, fluid shifts and neuromotor adjustments) microgravity) Delays before testing Possible to test immediately after transition to microgravity (which permits observation of transient changes and rapid adaption) Testing only possible an hour or more after exposure to microgravity and extensive activity (which prevents observation of transient and rapid adjustments) Test schedule Controlled by experimenter Constrained by the astronaut's busy schedule Workload/fatigue The subject's only task is to serve as a subject, within a normal sleep schedule The astronaut's time as a subject is a small part of the busy schedule performed while working shifts Angular acceleration Aircraft rotation is a significant factor in some experiments Significant angular accelerations are exceptional Motion sickness 30-50% of subjects are sick if not taking medication, but the type and amount of medication can be controlled 50-70% of astronauts are sick the first 3-4 days, and the experimenter does not control the medication consuming, but they would be enormously helpful for interpreting space flight data. Vestibulo-ocular reflexes A primary concern in studies of movement control in weightless conditions has been to understand the conjoint action of the weight-sensitive otoliths and the weight-insensitive semicircular canals [10]. In the 70s, a study called the skylab M-131 experiment was designed to assess responses to Coriolis cross-coupled stimulation (CCS), an unusual combination of linear and angular acceleration that is elicited by tilting the head while sitting in a rotating chair [10]. CCS usually evokes severe disorientation and nausea on earth. When first tested in orbit on mission day six, the astronauts in the study found that CCS elicited no disorientation or nausea [10]. These dramatic results had no clear interpretation, however, because of the time delay before testing in orbit and an absence of eye movement recordings. A later series of parabolic flight studies assessed whether the change in response to CCS was immediate or developed gradually in microgravity (discussed below). Step changes in angular velocity coupled with eye movement (nystagmus) recordings were used to study the influence of gravitoinertial force levels on the vestibuloocular reflexes (VOR) in parabolic flight. These studies showed that the gravitoinertial force level had no influence on the peak slow phase velocity of nystagmus, indicating that the peripheral response of the semicircular canals is (during brief exposures at least) independent of linear acceleration [11]. T h e time constant of nystagmus decay is lower both at 0g and 1.8g than at lg, indicating an immediate decrease in velocity storage. Suppression of post-rotary nystagmus by post-rotary tilting of the head (so-called 'dumping') has not been observed in 0g [12]. Such findings implicate tonic levels of otolithic and somatosensory discharge along with canalicular, cervical and motor activity in regulating the velocity storage mechanism of the VOR. Space flight observations have confirmed the absence of gain changes and the absence of nystagmus dumping by head movements in 0g [13,14°]. T h e physiological data available are quite preliminary but suggest an increase in end-organ activity with continued exposure to microgravity [15] but no difference in post-flight VOR gain or velocity storage relative to pre-flight values [16]. T h e torsional VOR under terrestrial conditions is influenced both by gravitational force and by the dynamic linear accelerations generated by head movements. In space flight, the tonic shear owing to gravity is absent. Preliminary evidence suggests that the torsional VOR goes through adaptive changes [17]. Gain initially decreases, then increases during the flight to greater than pie-flight levels. Post-flight, there is a decreased gain, relative to pre-flight, apparent even after four days. Oculomotor control Gaze maintenance in the dark (in response to the instruction 'fixate straight ahead') has been studied in parabolic flight both during transitions and at steady 748 Neuralcontrol state force levels [18]. Many individuals experience body inversion upon the transition to microgravity, so that changes in gaze can reflect either vestibulo-ocular or perceptual effects [19]. Studies of vertical optokinetic nystagmus tend to show an increase in the slow phase velocity for 'downward' visual motion, a decrease for upward slow phase velocity in 1.8-2.0 gz, and a slight (or insignificant) reverse relationship in 0 gz relative to straight and level flight [20]. (Here, upward and downward are specified in relation to the body's longitudinal z-axis.) Space flight observations point to a tendency for both upward and downward optokinetic nystagmus gain to be diminished in microgravity [21,22]. In general, the findings support a roughly linear summation of optokinetic eye velocity and otolith signals, the latter being diminished in microgravity (<1 g) and enhanced in hypergravity (>1 g). In space flight, saccadic eye movements display increased latencies and decreased peak velocities in some studies (see [23]), but the opposite in others [24]. T h e studies showing diminished performance were conducted early in flight, often on motion sick subjects; the study reporting enhanced performance [24] was conducted on the last flight day in orbit. Horizontal pursuit eye movements, both with head-free and head-fixed conditions, show no inflight changes. By contrast, vertical pursuit eye movements are affected: upward pursuit being accomplished primarily by saccades and downward pursuit by a combination of saccades and smooth eye movements [23]. Arm movement control Several parabolic flight studies have shown an enhancement of tonic vibration reflexes in 1.8 g and a diminution in microgravity [25,26]. This suggests a decreased muscle spindle gain, at least during initial exposure to microgravity. A systematic study of arm movement kinematics supports this conclusion: subjects trained under l g conditions made unsupported forearm movements of particular amplitudes and frequencies in a horizontal and a vertical plane [27]. When subjects were tested blindfolded, in parabolic flight, rapid movements were found to be unaffected by the g level or arm orientation. By contrast, slow movements showed a smaller amplitude and more frequent dynamic overshoots of final position in 0 g relative to 1 g, both for horizontal and vertical arm orientations. These findings are consistent with a decreased spindle gain in 0 g, which would also imply a decrease in position sense accuracy. (The latter changes are commonly reported by astronauts [28].) An important feature of this study is the absence of gravitoinertial resultant force (GIF)-related differences for horizontal and vertical forearm movements. It indicates that the activity of the muscles that are not directly involved in the movements of the forearm but that support the forearm are involved in planning movements involving the forearm. This means that the support musculature for maintaining posture can function as a linear accelerometer, keying the nervous system into the expected load demands for movements in different axes. Thus, considerable 'automatic self-adjustment' for background force level takes place simply by virtue of exposure to a changed background force level. Eye-hand coordination Few studies of eye-hand coordination have been carried out. Early observations in parabolic flight were often contradictory: some showed overreaching in 0g and underreaching in hypergravity [29], whereas others showed the opposite [30]. Such studies are complicated by the fact that perceptual mislocalizations of isolated targets occur as a function of background force level. In 0g, a target will be seen below its true position, whereas in 1.8g, it will be seen above its true position. This phenomenon is called the 'elevator illusion' and is a variant form of the oculogravic illusion [31-35]. Postural control in microgravity In a weightless environment, posture does not have the same meaning as on earth where posture is the maintenance of a body attitude against gravity. Early studies focused on postural sub-systems such as excitability of motor neuron pools [36], but recent ones have concentrated on functional synergies [37-40]. One method for studying posture in microgravity is to attach an astronaut's feet to the deck of the spacecraft. In some experiments, the body is also artificially loaded by means of bungee cords. Space flight experiments have shown that the posture assumed when the feet ate attached in-weightlessness differs from that assumed on earth, in that there is greater flexion of the knees and trunk [41]. On earth, arm raising is associated with anticipatory postural adjustments that compensate for the impending balance consequences of the arm movement, both dynamic and static [42]. In weightlessness, arm raising is associated with anticipatory compensations of the hip, similar to those exhibited on earth, but the head exhibits more displacement. Rapid backward and forward bending movements of the trunk made with the feet attached are associated with forward and backward displacements of the hips and knees, as under terrestrial conditions. T h e kinematics are also similar, especially for forward trunk displacements. Interestingly, the patterns of muscle activity necessary to create these axial synergies in microgravity are quite different from on earth [38]. These and other observations suggest that there is a gradual re-interpretation of muscle proprioceptive signals during prolonged exposure to microgravity. Proprioceptive illusions of body displacement induced by ankle muscle vibration during bungee loading reflect a shift from perceived changes in whole body orientation to changes in foot angle [40]. Post-flight studies of posture and locomotion have shown that return to normal occurs over several hours for some forms of adjustment, but can take days or even weeks for other forms [43°,44°,45]. Motor function in microgravity: movement in weightlessness Lackner and DiZio 749 Figure 2 A Coriolis force (FCor) is generated when a person sitting in a rotating room voluntarily moves an arm (or other body part). The force is proportional to the limb's mass (m), its velocity (v) relative to the room, and the angular velocity of room rotation (o)). The Coriolis force is always perpendicular to the movement direction: for example, it is rightward for forward-reaching movements made during counter-clockwise rotation. Inertial force perturbations of movement trajectory Artificial gravity environments are useful for studying adaptive m o v e m e n t control. Artificial gravity is the centripetal force associated with rotation [46,47°]. In a rotating spacecraft, the walls serve as the 'floor' on which astronauts walk. On earth, if one is at the center of a fully enclosed rotating room, the centripetal force associated with low rates of revolution (e.g. 5-10 rpm) is negligible and below threshold for the otolith organs. In these circumstances, all the forces on the body are normal unless one moves. Then, if a pointing m o v e m e n t is made, an inertial Coriolis force is generated (Figure 2). This force is proportional to the product of the velocity of the arm (or other body part) m o v e m e n t and the rotational velocity of the environment, and it acts in the direction opposite to that of rotation. T h e Coriolis force is an inertial non-contact force (unlike the mechanical forces used in traditional load compensation and m o v e m e n t perturbation experiments) that is present only during the arm m o v e m e n t and acts only on the arm. By contrast, one cannot put just the arm in microgravity. Studies using Coriolis perturbations [46,47 °] have provided compelling evidence against c~ equilibrium point models of m o v e m e n t control [48], showing both a failure of equifinality predictions as well as independent adaptation of m o v e m e n t path and end position. Moreover, extraordinarily rapid adaptation occurs, with m o v e m e n t accuracy being regained after five or ten movements. T h e advantage of this paradigm is that the rotating room can be brought up to speed very slowly so that the subject ahvays feels perfectly stationary and never experiences unusual forces until trying to move a limb. By contrast, both in parabolic flight and orbital flight, the subject's entire body is exposed to the unusual force level and, therefore, senses the changed force level before initiating movement. Rotating chairs are inadequate tools for studying Coriolis perturbations of m o v e m e n t trajectories because subjects sense the self-rotation and may attempt to compensate for it voluntarily or automatically. Conclusions Space flight provides opportunities to study long-term motor adaptation to weightlessness, especially for motor mechanisms with relatively long adaptive time constants. Parabolic flight is better suited to studying the consequences of force transitions and rapidly adapting motor processes. Virtually immediate adjustments of motor control can be carried out on the basis of the nervous system detecting changed force demands for maintaining posture. T h e use of Coriolis inertial perturbations provides a new experimental tool for studying adaptive m o v e m e n t control. Acknowledgements The authors' work is supported by National Aeronautic and Space Administration grants NAGW-4374 and NAGW-4375. References and recommended reading Papers of particular interest, published within the annual period of review, have been highlighted as: • of special interest 1. Wilson VJ, Melvill Jones G: The Mammalian Vestibular System. New York: Plenum Press; 19'79. 2. Lackner JR, Graybiel A: Perception of body weight and body mass at twice Earth-gravity acceleration levels. Brain 1984, 107:133-144. 3. Lackner JR: Human sensory-motor adaptation to the terrestrial force environment. In Brain Mechanisms and Spatial Vision. Edited by Ingle D, Jeannerod M, Lee D. Amsterdam: Nijhoff; 1985:175-910. 4. Lackner JR, Graybiel A: Illusions of postural, visual, and substrate motion elicited by deep knee bends in the increased gravitoinertial force phase of parabolic flight. Exp Brain Res 1981,44:312-316. 750 Neural control 5. Lackner JR: Sensory-motor adaptation to non-terrestrial force levels. In Proceedings of the Symposium on Vestibular Organs and Altered Force Environments. Edited by Igarashi M, Nute K. Houston: NASNUSRA; 1987:69-?7. 6. Thornton W, Hoffler GW, Rummel JA: Anthropometric changes and fluid shifts. In Biomedical Results from Skylab. Washington DC: NASA SP 377; 1977:330-338. 7. Zhou MY, Klitgaard H, Saltin B, Roy RR, Edgerton VR, Gollnick PD: Myosin heavy chain isoforms of human muscle after short-term spaceflight. J App/Physio/1995, 78:1740-1744. 8. Caiozzo VJ, Haddad F, Baker MJ, Herrick RE, Prietto N, • Baldwin KM: Microgravity-induced transformations of myosin isoforms and contractile properties of skeletal muscle. J App/ Physiol 1996, 81:123-144. Contractile properties of antigravity muscles are adversely affected by 14 day exposure to microgravity. This raises the possibility that in-flight changes in motor control reflect both central alterations in neural control and peripheral alterations in muscle response properties. 9. Davis JR, Vanderploeg JM, Santy PA, Jennings RT, Stewart DF: Space motion sickness during 24 flights of the space shuttle. Aviat Space Environ Med 1988, 59:1185-1189. 10. Graybiel A, Miller EF, Homick JL: Experiment M-131. Human vestibular function. In Biomedical Results from Skylab. Edited by Johnston RS, Dietlein LE Washington DC: NASA SP377; 1977:330-338. 11. DiZio P, Lackner JR, Evanoff JN: Influence of gravitoinertial force level on oculomotor and perceptual responses to sudden stop stimulation. Aviat Space Environ Med 1987, 27. Fisk J, Lackner JR, DiZio P: Gravitoinertial force level influences arm movement control. J Neurophysiol 1993, 69:504-511. 28. Schmitt HH, Reid DJ: Anecdotal Information on Space Adaptation Syndrome. Houston: NASNUSRA Space Biomedical Research Institute Memorandum; 1985. 29. Gerathewohl SJ, Strughold H, Stallings HE): S e n s o r i m o t o r performance during weightlessness: eye hand coordination. J Aviat Med 1957, 28:7-12. 30. Whiteside TCD: Hand-eye coordination in weightlessness. Aerospace Med 1961, 32:719-725. 31. Graybiel A: Oculogravic illusion. Arch Ophthalmo11952, 48:605-615. 32. RomanJA, Warren BH, Graybiel A: Some observations on t h e behavior of a visual target and a visual afterimage during parabolic flight maneuvers. Aerospace Med 1963, 34:841-645. NivenJI, Whiteside TCD, Graybiel A: The elevator illusion: apparent motion of a visual target during vertical acceleration. In Navy Bureau of Medicine and Surgery, Report No. 93. Pensacola, Florida: US Naval Aviation Medical Center; 1963:1-29. Whiteside TCD, Graybiel A, Niven Jl: Visual illusions of movement. Brain 1965, 88:193-219. 33. 34. 35. Bock O, Howard IP, Money KE, Arnold KE: Accuracy of aimed arm movements in changed gravity. Aviat Space Environ Med 1992, 63:994-998. 36. ReschkeMF, Anderson DJ, Homick JL: Vestibulospinal reflexes as a function of microgravity. Science 1984, 225:212-214. Clement G, Lestienne F: Adaptive modifications of postural attitude in conditions of weightlessness. Exp Brain Res 1988, 72:381-389. Massion J, Gurfinkel V, Lipshits M, Obadia A, Popov K: Axial synergies under microgravity conditions. J Vestib Res 1993, 3:275-287. MassionJ: Movement, posture and equilibrium: interaction and coordination. Prog Neurobio11992, 38:35-56. Roll JP, Popov K, Gurfinkel V, Lipshits M, Andre-Deshays C, Gilhodes JC, Quoniam C: Sensorimotor and perceptual function of muscle proprioception in microgravity. J Vestib Res 1993, 3:259-273. Clement G, Gurfinkel V, Lestienne F, Lipshits MI, Popov KE: Adaptation of postural control to weightlessness. Exp Brain Res 1984, 57:61-72. Cordo PJ, Nashner LM: Properties of postural adjustments associated with rapid arm movements. J Neurophysio11982, 47:287-302. 37. 58(suppl):A224-A230. 12. DiZio P, Lackner JR: The effects of gravitoinertial force level and head movements on post-rotational nystagmus and illusory after-rotation. Exp Brain Res 1988, 70:485-495. 13. Oman CM, Balkwill MD: Horizontal angular VOR, nystagmus dumping, and sensation duration in spacelab SLS-1 crew members. J Vestib Res 1993, 3:315-330. 14. Oman CM, Pouliot CF, Natapoff A: Horizontal angular VOR • c h a n g e s in orbital and parabolic flight: human neurovestibular studies on SLS-2. J App/Physio/1996, 81:69-81. Confirms parabolic flight studies showing that in microgravity, post-rotary head tilt does not 'dump' nystagmus as it does in 1 g conditions. 15. Correia MJ, Perachio AA, Dickman JD, Kozlovskaya IB, Sirota MG, Yakushin SB, Deloozerova IN: Changes in monkey horizontal semicircular canal afferent responses after spaceflight. J App/ Physiol 1992, 73:112S-120S. 16. Cohen B, Kozlovskaya I, Raphan T, Solomon D, Helwig D, Cohen N, Sirota M, Yakushin S: Vestibuloocular reflex of rhesus monkeys after spaceflight. J App/Physio/1992, 73:121 S-131 S. 1'7. Clarke AH, Teiwes W, Scherer H: Evaluation of the torsional VOR in weightlessness. J Vestib Res 1993, 3:207-218. 18. Cheung BSK, Money KE, Howard IP: Human gaze instability during brief exposure to microgravity. J Vestib Res 1994, 4:17-27. 19. Graybiel A, Kellogg RS: The inversion illusion and its probable dependence on otolith function. Aerospace Med 1967, 38:1099-1103. 20. Clement G, Vieville T, Lestienne F, Berthoz A: Modifications of gain asymmetry and beating field of vertical optokinetic nystagmus in microgravity. Neurosci Lett 1985, 63:271-274. 21. Kornilova LN, Grigorova V, Bodo G: Vestibular function and sensory interaction in space flight. J Vestib Res 1993, 3:219-230. 22. Clement G, Popov KE, Berthoz A: Effects of prolonged weightlessness on horizontal and vertical optokinetic nystagmus and optokinetic afternystagmus in humans. Exp Brain Res 1993, 94:456-462. 23. Andre-Deshays C, Israel I, Charade O, Berthoz A, Popov K, Lipshits M: Gaze control in microgravity. 1. Saccades, pursuit, eye-head coordination. J Vestib Res 1993, 3:331-343. 24. Uri JJ, Linder BJ, Moore TD, Pool SL, Thornton WE: Saccadic eye movements during space flight. In NASA Technical Memorandum 100 475. Houston: NASA; 1989:1-9. 25. Lackner JR, DiZio P, Fisk JD: Tonic vibration reflexes and background force level. Acta Astronautica 1992, 26:133-136. 26. Lackner JR, DiZio P: Gravitoinertial force level affects the appreciation of limb position during muscle vibration. Brain Res 1992, 592:175-180. 38. 39. 40. 41. 42. 43. • McDonald PV, Basdogan C, Bloomberg JJ, Layne CS: Lower limb kinematics during treadmill walking after space flighL Implications for gaze stimulation. Exp Brain Res 1996, 112:325-331. The timing of toe-off and heel strike during treadmill walking are more variable immediately post-flight. Neural control is critical at these phases of the step cycle because of the great potential for energy transfer. Novel non-linear techniques are used for analysis and modeling. 44. Bloomberg JJ, Peters BT, Huebner WP, Smith SL, Reschke MF: • Locomotor head-trunk coordination strategies following space flight. Exp Brain Res 1997, in press. Astronauts returning from their first shuttle mission have gaze instabilities during locomotion on a treadmill. These gaze instabilities have practical significance for safe egress from the spacecraft post-flight. Theoretically, understanding the relationship between gaze and locomotion is important for current top-down and bottom-up models of gaze control. 45. PaloskiWH, Bloornberg JJ, Reschke MF, Harm DL: Space flight induced changes in posture and locomotion. J Biomech 1994, 27:812-815. 46. LacknerJR, DiZio P: Rapid adaptation to Coriolis force perturbations of arm trajectory. J Neurophysio/1994, 72:299-313. 47 DiZio P, Lackner JR: Motor adaptation to Coriolis force • perturbations of reaching movements: endpoint but not trajectory adaptation transfers to the non-exposed arm. J Neurophysiol 1995, 74:1767-1792. Inertial, non-contacting Coriolis forces were used to perturb limb movements. The results are inconsistent with equilibrium point models of movement control and highlight the need for more complex models. 48. Bizzi E, Mussa-lvaldi FA, Giszter S: Does the nervous system use equilibrium point control to guide single and multiple joint movements? Behav Brain Sci 1992, 15:603-613.