RESTORATION OF NEUTRON RADIOGRAPHY IMAGES NOREHAN BINTI MOHD NOR UNIVERSITI TEKNOLOGI MALAYSIA
advertisement

RESTORATION OF NEUTRON RADIOGRAPHY IMAGES
NOREHAN BINTI MOHD NOR
UNIVERSITI TEKNOLOGI MALAYSIA
RESTORATION OF NEUTRON RADIOGRAPHY IMAGES
NOREHAN BINTI MOHD NOR
A dissertation submitted in partial fulfillment of the
requirements for the award of the degree of
Master of Science (Physics)
Faculty of Science
Universiti Teknologi Malaysia
APRIL 2010
iii
To my beloved mother and father
iv
ACKNOWLEDGEMENT
I would like to express my deep gratitude to my thesis supervisor, PM Dr.
Wan Muhamad Saridan b. Wan Hassan, for his guidance in formulating the
objectives of this work, and for his encouragement and support throughout the
completion of this dissertation even though it takes only three months. He taught me
to develop independent thinking and research skills, and also express idea. This
dissertation would not have been possible without his expert guidance. The many
hours devoted to discussions with me are greatly appreciated.
I would like to express my sincere appreciation to my parent, Pn. Norsiah and
En. Mohd Nor for their loving and constant support, patience, and understanding,
especially during some difficult circumstances.
Without their encouragement, I
would have been unable to carry this work to completion. Special thanks also to my
sisters for their good wishes.
Special thanks to all my friends especially those in the same class with me
within this 3 semester. A memory with all of you during this study will not be
forgotten. Last but not least to my funding sponsor (KPT), thank you very much for
the financial support.
v
ABSTRACT
Neutron radiographic images have been used in a wide variety of industrial
research and non-destructive testing applications since the early 1960s. Image in any
form was never an exact representation of the object under observation because it is
always corrupted by the imaging system itself. Neutron radiography image also
encounters the same problem. Digital image restoration of image degraded by
blurring and random noise is a solution to the problem. This research will try to
restore the neutron radiography images with several restoration methods. The
proposed methods are Weiner filter, regularized filter, Lucy-Richardson algorithm
and blind deconvolution. All of the techniques were implemented using MATLAB
programming to facilitate the demonstration of the effect of the methods. The result
obtained will be analyzed and compared. It is shown that all the proposed methods
can be used for restoration of neutron radiography images. The best and effective
result for neutron radiography are by using Weiner filter with autocorrelation
function and Lucy-Richardson (LR) algorithm with 500 iterations compared to other
methods.
vi
ABSTRAK
Imej dari radiografi neutron telah digunakan secara meluas sejak awal tahun
1960 dalam penyelidikan industri dan dalam ujian tanpa musnah. Sebarang imej
yang terhasil selalunya tidak mempamerkan objek sebenar yang diperhatikan kerana
kebiasaanya ia telah mengalami kerosakan akibat sistem pengimejan itu sendiri. Hal
ini juga merupakan masalah yang dihadapi oleh imej yang terhasil dari kaedah
radiografi neutron. Kekaburan dan juga hingar merupakan antara penyumbang
kepada kerosakan imej ini. Oleh itu, untuk mengatasi masalah ini pemulihan imej
perlu dilakukan. Kajian ini dilakukan bertujuan untuk mengkaji beberapa kaedah
pemulihan imej yang boleh digunakan untuk imej radiografi neutron. Kaedah
pemulihan yang dimaksudkan adalah penapis Wiener, regularized filter, LucyRichardson algorithm dan blind deconvolution. Kesemua kaedah ini dilaksanakan
menggunakan perisian MATLAB untuk mempamerkan kesan daripada proses
pemulihan imej itu. Hasil yang didapati akan dianalisis dan perbandingan antara
kaedah pemulihan akan dibuat untuk mengenalpasti kaedah yang terbaik. Daripada
keputusan yang didapati, kesemua kaedah pemulihan imej yang dicadangkan boleh
digunakan untuk pemulihan imej radiografi neutron. Dari perbandingan yang dibuat,
didapati kaedah penapis Wiener dengan fungsi autokorelasi dan kaedah LucyRichardson dengan ulangan sebanyak 500 kali adalah kaedah yang terbaik jika
dibandingkan dengan kaedah lain kerana ia menghasilkan imej yang lebih baik.
vii
TABLE OF CONTENTS
CHAPTER
1
2
TITLE
PAGE
DECLARATION
ii
DEDICATION
iii
ACKNOWLEDGEMENTS
iv
ABSTRACT
v
ABSTRAK
vi
TABLE OF CONTENTS
vii
LIST OF TABLES
x
LIST OF FIGURES
xi
LIST OF SYMBOLS
xiv
LIST OF APPENDICES
xvi
INTRODUCTION
1.1 Preview
1
1.2 Background of Research
4
1.3 Scope of the Research
5
1.4 Objective
5
1.5 Literature Review
6
THEORY
2.1 Basic Concepts of Neutron Radiography
2.1.1 Neutron Sources
2.1.1.1 Nuclear Reactors
8
8
9
viii
2.1.1.2 Accelerators
10
2.1.1.3 Isotopes
11
2.1.1.4 Californium-252
11
2.1.2 Neutron Transmission
12
2.1.2.1 Attenuation of Neutrons Compared with
that of X-rays
2.1.3 Neutron Interactions
12
14
2.1.3.1 Non-Scattering Interactions
14
2.1.3.2 Neutron Scattering
16
2.1.4 Detection of Neutron
2.1.4.1 Neutron Image Conversion Methods for
17
17
Radiographic Film
2.1.5
2.1.4.2 Direct Exposure Methods
18
2.1.4.3 The Image Transfer Method
19
2.1.4.4 Neutron Scintillators
20
Image Analysis
2.2 Digital Image Restoration
22
2.2.1
Digital Image Representation
22
2.2.2
Image Restoration
23
2.2.3
Model of Image Degradation/Restoration
Process
3
20
24
METHODOLOGY
3.1 Introduction to Sample
26
3.2 Software
27
3.3 Wiener Filter
27
3.4 Constrained Least Squares (Regularized) Filtering
29
3.5 Iterative Nonlinear Restoration Using the
Lucy-Richardson Algorithm
31
3.6 Blind Deconvolution
32
3.7 Operational Framework
34
ix
4
DATA AND ANALYSIS
4.1 Introduction
35
4.2 Reference Image
35
4.3 Neutron Radiography Image
36
4.4 Point Spread Function (PSF) Calculation
38
4.5 Result Obtained from Wiener Filter Method
40
4.6 Result Obtained from Regularized Filter Method
42
4.7 Result Obtained from Lucy Richardson Filter Method 44
4.8 Result Obtained from Blind Deconvolution Method
46
4.9 Mean and Standard Deviation of the Elements
of Matrix for Every Restored Neutron
Radiography Image
4.10 Restoration of Sensitivity Indicator
5
6
49
50
DISSCUSSION
5.1 Wiener Filter
52
5.2 Regularized Filtering
53
5.3 Lucy Richardson (LR) Algorithm
54
5.4 Blind Deconvolution
55
5.5 Restoration of Sensitivity Indicator
55
CONCLUSION AND RECOMMENDATION
6.1 Conclusion and Recommendation
57
REFERENCES
59
Appendices A-D
62-65
x
LIST OF TABLES
TABLE NO.
TITLE
PAGE
2.1
Classification of neutrons by energy
9
3.1
Operation framework
34
4.1
Mean and standard deviation of the elements of matrix
49
4.2
Mean and standard deviation value for Figure 4.20
50
xi
LIST OF FIGURES
FIGURE NO.
TITLE
PAGE
2.1
Mass attenuation coefficient versus atomic number
13
2.2
Radiative capture
15
2.3
Inelastic scattering
16
2.4
Direct exposure method of making a neutron radiograph
18
2.5
Image transfer method for making neutron radiographs
19
2.6
Characteristic curve
21
2.7
A model of the image degradation/restoration process
24
3.1
Operation framework
34
4.1
Reference image
36
4.2
Original neutron radiography image
36
4.3
Neutron radiography image that will be analyzed
37
4.4
Histogram of neutron radiography image (Figure 4.3)
37
4.5
Graph of index of the column in the image versus column 38
4.6
Graph of dy/dx versus column
4.7
Gaussian spatial filter
4.8
(a) Blurred, noisy image. (b) Result of inverse filtering.
38
39
(c) Result of Wiener filtering using a constant ratio.
(d) Result of Wiener filtering using autocorrelation
functions.
4.9
40
(a) Result of NR inverse filtering using Wiener filter.
(b) Result of NR using Wiener filtering with a constant
ratio.(c) Result of NR using Wiener filtering with
autocorrelation functions.
40
xii
4.10
(a) Histogram of NR inverse filtering using
Wiener filter. (b) Histogram of NR using Wiener
filtering with a constant ratio. (c) Histogram of NR
using Wiener filtering with autocorrelation functions.
4.11
41
(a) Blurred, noisy image. (b) Result of image (a)
Restored using regularized filter with noisepower
equal to 4. (c) Result of image (a) restored using
regularized filter with noisepower equal to 0.4 and
a RANGE of [1e-7 1e7]
4.12
42
(a) Result of restored NR image using regularized filter
with noisepower equal to 4. (b) Result of restored NR
image using regularized filter with noisepower
equal to 0.4 and a RANGE of [1e-7 1e7]
4.13
42
(a) Histogram of restored NR image using regularized
filter with noisepower equal to 4. (b) Histogram of
restored NR image using regularized filter with
noisepower equal to 0.4 and a RANGE of [1e-7 1e7]
4.14
43
(a) Blurred, noisy image. (b) Restored image using
L-R algorithm with 10 iteration. (c) Restored image
using L-R algorithm with 100 iteration. (d) Restored
image using L-R algorithm with 500 iteration.
4.15
44
(a) Restored image using L-R algorithm with
10 iteration. (b) Restored image using L-R algorithm
with 100 iteration. (c) Restored image using
L-R algorithm with 500 iteration.
4.16
44
(a) Histogram of restored image using L-R algorithm
with 10 iteration. (b) Histogram of restored image using
L-R algorithm with 100 iteration. (c) Histogram of
restored image using L-R algorithm with 500 iteration
44.
xiii
4.17
(a) Blurred, noisy image. (b) Restored image using
blind deconvolution with 5 iterations. (c) Restored
image using blind deconvolution with 10 iterations.
(d) Restored image using blind deconvolution with 20
iterations. (e) Restored image using blind deconvolution
with 30 iterations
4.18
46
(a) Restored image using blind deconvolution with 5
iterations. (b) Restored image using blind deconvolution
with 10 iterations. (c) Restored image using blind
deconvolution with 20 iterations. (d) Restored image
using blind deconvolution with 30 iterations.
4.19
47
(a) Histogram of restored image using blind
deconvolution with 5 iterations. (b) Histogram of
restored image using blind deconvolution with
10 iterations.(c) Histogram of restored image using blind
deconvolution with 20 iterations. (d) Histogram of
restored image using blind deconvolution with
30 iterations.
4.20
48
(a) Image of sensitivity indicator (SI) before restoration.
(b) Image of SI after using Wiener filter with
autocorrelation function. (c) Image of SI after using
LR algorithm with 500 iterations
4.21
50
(a) Image histogram of sensitivity indicator before
restoration. (b) Image histogram of SI after using Wiener
filter with autocorrelation function. (c) Image
histogram of SI after using LR algorithm with
5.1
500 iterations
51
Sensitivity indicator
56
xiv
LIST OF SYMBOLS
A
-
Target mass number
C
-
Minimum of criterion function
De
-
Photographic density
E
-
Exposure of the film
Et
-
Inelastic threshold
f(x,y)
-
Input image
-
Estimate of the original image
-
Slope in the linear portion of the characteristic response
x,y)
G
curve for the film
Goffset
-
Dark current
g(x,y)
-
Degraded image
H
-
Matrix
H
-
Degradation function
H(u,v)
-
Optical transfer function
, h(x,y)
I, -
Complex conjugate of , Spatial representation of the degradation function
-
Transmitted intensity
-
Incident intensity
N
-
Number of atoms per cubic centimeter
P(u,v)
-
Fourier transform of the function
, -
Power spectrum of the noise
-
Power spectrum of the undegraded image
t
-
Thickness of specimen in the beam path
Σ
-
Macroscopic absorption cross section
-
Total macroscopic cross section
Io, , Σ
xv
ε1
-
Energy of the nucleus first excited state
η(x,y)
-
Noise term
σ
-
Neutron cross section of the particular material or isotope
σ
-
Standard deviation
µn
-
Linear attenuation coefficient for neutrons
µx
-
Linear attenuation coefficient for photons
*
-
convolution
-
Laplacian operator
2
xvi
LIST OF APPENDICES
APPENDIX
TITLE
PAGE
A
Codes for Wiener Filtering
62
B
Codes for Regularized Filtering
63
C
Codes for Lucy-Richardson Algorithm
64
D
Codes for Blind Deconvolution
65
CHAPTER 1
INTRODUCTION
1.1 Preview
Neutrons were discovered as independent particle in 1932 by Chadwick. The
history of neutron radiography begins in 1935 when Professor Hartmut Kallman
whose publication in 1948 and early joint patents with Kuhn 1937 outlined the basic
principles of neutron radiography [1]. The original Kallman work was performed
with a small accelerator that is equivalent to about 2-3 g of a modern radiumberyllium source. The fast neutron yield would have been about 4 x 107 neutrons per
second which would yield a low intensity thermal neutron beam after moderation and
collimation.
At about the same time the investigation done by Kallman and Kuhn, similar
studies were being conducted by Peter, also in Germany [1]. Peter had the advantage
of a much more intense neutron source, namely an accelerator, whose output was
roughly equivalent to a 10 kg radium-beryllium neutron source. The exposure time
to obtain neutron radiograph by Peter are faster which is in the order of 1-3 minutes
compared with days in previous work
2
Because of the Second World War, further development of neutron
radiography did not occur until the mid-1950s when nuclear reactors were developed
as prolific sources of neutrons [2]. Indeed, Peter had to wait until 1946 to publish his
results and Kallmann and Kuhn until 1948. The next major development programme
in neutron radiography was mounted at the Argonne National Laboratory under the
control of Berger [1]. In 1966 work on neutron radiography commenced at the UK
Atomic Energy Authority’s Dounreay Experimental Reactor Establishment, and in
1969 work was also recommenced at the Atomic Energy Authority Research
Establishment at Harwell. Since that date many laboratories all over the world have
become actively interested in neutron radiography.
The first neutron radiographs produced were not in a high quality, but it gives
valuable information about neutron sources and image detection methods. This is
because the early research work on neutron radiography was concentrated on
developing the techniques and delineating the useful application areas of the
technique while laboring under the disadvantage of very low output neutron sources.
Subsequent improvements in technology have made neutron radiography a useful
tool for inspecting materials and devices containing elements such as hydrogen,
beryllium, lithium, and boron. It was especially useful for inspecting electronic and
explosive devices having nonmetallic materials contained in a metal jacket.
Neutron radiography, like conventional X-ray radiography, uses a form of
penetrating radiation to nondestructively assess the physical integrity of selected
materials and structures. The radiographic image is essentially a two-dimensional
shadow display or picture of the intensity distribution of thermal neutrons that have
passed through a material object. Although both types of radiography are similar in
many ways, attenuation characteristics of the two types of energy are not only
different but are sometimes opposite in nature. The total neutron cross section is the
criterion for utilizing neutron radiography, whereas density and atomic number are
the parameters of concern when testing with X-rays. Consequently, one method
cannot replace the other in fact they complement each other [3].
Neutron
radiography complements conventional X-ray radiography and gamma radiography
3
by having the capability of detecting flaws and material conditions in structures and
devices that cannot be effectively assessed with other methods.
The unique capability of neutrons is due to the fact that they do not interact
with orbiting electrons in the atoms of materials being tested. This property allows
them to travel rather freely through materials until there are in direct collisions with
atomic nuclei. The nuclei of some nonmetallic materials attenuate neutrons more
than those of dense materials such as iron. This allows imaging of low density
ordnance devices encased in high density metallic materials.
Other unique
capabilities of neutron radiography are to assess the flow of lubricant and fuel in
aircraft and automobile engines during test operations and also radiographed the
burning propellant inside the steel rifle barrels or rocket motors.
Neutron radiography does have some disadvantages. These include the fact
that practical neutron sources and shielding materials are large and heavy, and
adequate sources are expensive. Relatively long exposure times are required for the
smaller, low-yield neutron sources. More complex film exposure procedures are
required for neutron radiography than for X-ray radiography, and low-level
radioactivity of cassettes and transfer screens causes some issue for personnel safety
[3].
4
1.2 Background of Research
Images made with neutrons have been widely used in industrial research and
non-destructive testing applications since the early 1960s [4]. General applications
for neutron radiography include inspections of nuclear materials, explosive devices,
turbine blades, electronic packages and miscellaneous assemblies including
aerospace structure (metallic honeycomb and composite components), valves and
other assemblies.
Industrial applications generally involve the detection of a
particular material in an assembly containing two or more materials. Examples
include detection of residual ceramic core in an investment-cast turbine blade,
corrosion in a metallic assembly, water in honeycomb, explosive in a metallic
assembly or a rubber ‘O ring’ in a valve.
Nuclear applications depend on the
capability of neutron radiography to yield good, low background radiographs of
highly radioactive material, to penetrate fairly heavy assemblies and to discriminate
between isotopes [5].
In neutron radiography, there are several components tend to degrade the
image, limiting the resolution of neutron radiography. The image degraded sources
in neutron radiography are geometric unsharpness associated with lack of collimation
in the beam, statistical fluctuation associated with low neutron beam intensities or
gamma ray background, scattering degradation caused by scattering of neutrons
which deflects the beam, motion unsharpness due to object motion during the
exposure, and limitations in the imaging and processing systems, such as converterfilm unsharpness and electrical noise [6].
In neutron radiography, corrupted images often pose problem for analysis and
detection of the object being observed.
To overcome this problem, restoration
process was used to reduce the blurring and noise effects on the image. Restoration
was one of the areas in image processing techniques that have emerged as an
important multi-disciplinary field with applications in widely variety of area [7].
5
1.3 Scope of the Research
The restoration of digital images degraded by blurring and random noise is of
interest in many fields such as radar imaging, bio-medicine, industrial radiography,
seismology and consumer photography. This research was limited to the neutron
radiography images. The image from the neutron radiography will be restored using
Weiner filter, regularized filter, Lucy-Richardson algorithm and blind deconvolution.
All of this technique was implemented using MATLAB software version 7.0.0.19920
(R14) to facilitate demonstration of the result from the proposed restoration methods.
1.4 Objective
The objectives of the research are as follow:
1) To study the restoration techniques using MATLAB so it can improve the
quality of neutron radiography image.
2) To analyze the effect of digital image restoration techniques to the neutron
radiography images.
3) Comparison of restored neutron radiography image produced by different
restoration methods.
6
1.5 Literature Review
The restoration of digital images degraded by blurring and random noise was
become interest in many field such as aerial and radar imaging, biomedicine,
industrial radiography, seismology, and consumer photography [7]. There are many
restoration methods for image processing but in this study it’s limited to Wiener
filter, Lucy-Richardson filter, blind deconvolution and regularized filter.
Restoration of image using Wiener filter give impact to image processing
field. In 1989 Guan and Ward [8] publish a paper on restoring blurred images by the
Wiener filter. In this paper, the restoration of images distorted by systems with noisy
point spread functions and additive detection noise is considered. Computation was
carried out in the frequency domain using the fast Fourier transform (FFT) and
circulant matrix approximation. Experimental results in this study show that the
modified Wiener filter outperforms its linear counterpart (based on neglecting the
impulse-response noise). The modified Wiener filter also gives better restoration
results than a Backus-Gilbert technique.
Restoration using regularized method is also of interest to researcher in image
processing field. Mesarovic et al. [9] in their paper on regularized constrained total
least squares (RCTLS) image restoration found that this technique reduces
significantly ringing artifacts around edges. Additionally, the problem of restoring
an image distorted by a linear space-invariant point-spread function that is not
exactly known is formulated as the solution of a perturbed set of linear equations.
The RCTLS method is used to solve this set of equations.
Blind deconvolution technique was another restoration method in the image
processing field. The objective of the blind image restoration is to reconstruct the
original image from a degraded observation without the knowledge of either the true
image or the degradation process. A detailed description of the blind deconvolution
7
methods can be found in journal article by Kundur and Hatzinakos [10]. In this
paper, they present a novel blind deconvolution technique for the restoration of
linearly degraded images without explicit knowledge of either the original image or
the point spread function. The technique applies to situations in which the scene
consists of a finite support object against a uniformly black, gray, or white
background.
According to them, this occurs in certain types of astronomical
imaging, medical imaging, and one-dimensional (1-D) gamma ray spectra
processing, among others.
In this study, they prove that convexity of the cost
function, establish sufficient conditions to guarantee a unique solution, and examine
the performance of the technique in the presence of noise. The new approach was
experimentally shown to be more reliable and to have faster convergence than
existing nonparametric finite support blind deconvolution methods. For situations in
which the exact object support is unknown, they propose a novel support finding
algorithm.
Jin Wei [11] in his study found an effective image restoration method for
neutron radiography image. This study applies a combination of two methods which
is dual-tree complex wavelet transform (DT-CWT) to suppress noise and LucyRichardson (L-R) algorithm to deconvolution.
Results obtain in this study is
compared with the result of original L-R algorithm (without denoising step) in order
to illustrate the effectiveness of the proposed scheme. The result shows that the
combination of these two methods gives nearly perfect reconstruction.
CHAPTER 2
THEORY
2.1 Basic Concepts of Neutron Radiography
2.1.1
Neutron Source
Neutrons can be obtained in many ways such as nuclear reactors, particle
accelerators, artificially produced radioactive sources, spontaneous fission of
isotopes and by subcritical neutron multiplication. Neutron can be produced over a
wide range of energy levels. They have varying attenuation characteristics for the
various energy levels. In radiographic material assessments thermal neutrons were
most often used because they are relatively easy to detect and have favorable
attenuation characteristic [3]. Table 2.1 shows classification of neutron by energy.
9
Table 2.1: Classification of neutrons by energy
Neutrons
Energy Level
Cold
Below 0.01 eV
Thermal
0.01 to 0.3 eV
Slow
0 to 10 keV
Epithermal
0.3 to 10 keV
Resonance
1 eV to 102 eV
Fast
10 keV to 20 MeV
Relativistic
Over 20 MeV
2.1.1.1 Nuclear Reactors
The highest qualities of neutron radiographs to date are detained from
neutrons of nuclear reactor.
This is because the nuclear reactor produces high
thermal neutron beam intensities. Reactor sources can produce collimated thermal
beam intensities of 105 to 108 n cm-2 s-1. This compares with 10 to 104 n cm-2 s-1
available from radioisotopes and 103 to 106 n cm-2 s-1 from accelerators. Total
radiation coming from a nuclear reactor must be filtered with about 5.08 cm of lead
to remove or reduce unwanted gamma radiation. Advantages of reactor neutron
sources are:
1) Reactors produce a high percentage of thermal neutrons.
2) Neutron radiography can be an extra benefit from reactors purchased for other
applications.
3) Reactors provide long, relatively trouble free operation.
Disadvantages of reactor neutron sources include lack of portability, high cost and
extensive licensing requirements.
10
2.1.1.2 Accelerators
Neutrons can be produced by bombarding suitable targets with protons,
deuterons and high energy X- or gamma radiation. Accelerating equipment such as
the Van de Graaff generator can be adapted to the production of neutrons. Beryllium
and deuterium are good target materials and require radiation energies of 1.66 MeV
and 2.20 MeV, respectively.
Accelerator sources usually generate high energy
neutrons, but these fast neutrons can be slowed down by absorption and scattering in
a moderating material. Widely used moderators include hydrogen, beryllium, and
carbon. Hydrogen may be in form of water or paraffin. The fast neutron source is
surrounded with several inches of a moderating material, which becomes a source of
thermal neutrons as high energy particles lose energy by absorption and scattering.
These scattered neutrons must be collimated for effective radiographic testing at
reasonable source-to-test object distances.
Total losses in the moderator and
collimator reduce the energy of fast neutrons by a factor of 10-6. Because neutron
sources also contain X-rays and gamma rays, a neutron detector sensitive to X-rays
and gamma rays should not be used.
Components of a neutron source system include the neutron emitter, the
moderator, and the collimator as indicated, plus a beam catcher constructed of
neutron absorbing materials. This beam catcher is required to minimize radiation
hazards to operating personnel.
11
2.1.1.3 Isotopes
Isotopes or radioactive sources are produced by bombarding nuclei of atoms
with charged particles in an accelerator or nuclear reactor. This additional energy
changes stable nuclei to an excited unstable state. The unstable material decays by
emitting gamma rays or alpha particles. So, as energy is lost, the material returns to
its natural unexcited state at a characteristic rate for the particular material.
Unfortunately, there are only few isotopes that emit neutrons, with the
exception of Californium-252. In most cases, neutron production is accomplished in
the same way as with an accelerator, that is, by allowing energy emitted by the
isotope to bombard a neutron emitting target such as beryllium. Resulting neutrons
are of the fast or high energy type. Consequently, moderators and collimators must
be used just as for neutron beams from accelerators. Although the neutrons are of the
high energy type, the thermal intensity that can be obtained from these sources is
low. This means that longer exposure times are required than in the case of a nuclear
reactor source. However, these radioactive sources are reliable and semiportable.
2.1.1.4 Californium-252
Californium-252 is a relatively unique isotope for neutron production. It
undergoes fission spontaneously as part of a radioactive decay process and emits a
large number of neutrons. It has a half life of 2.65 years, a neutron yield of 2.3 x 1012
n s-1 g-1, a low gamma background, and can be used for direct exposure radiography.
Although it is costly for the amount of material needed to obtain adequate neutron
intensity for timely exposures, the expense can be avoided to a certain extent by
using subcritical neutron multiplication.
12
2.1.2
Neutron Transmission
Mathematically the relationship for neutron transmission looks much like that
for photons, but the variation of the action site (electron orbits or nucleus) produces
large differences in the amount of transmitted beam [5].
For photons:
For neutrons:
where I is the transmitted intensity; Io is the incident intensity; µ x is the linear
attenuation coefficient for photons; t is the thickness of specimen in the beam path; N
is the number of atoms per cubic centimeter; σ is the neutron cross section of the
particular material or isotope (a probability or effective area); and, µ n is linear
attenuation coefficient for neutrons (Nσ).
2.1.2.1 Attenuation of Neutrons Compared with that of X-rays
The effectiveness of both X-ray and neutron radiography depends on the
relative attenuation of the incident radiation intensity by the basic material being
radiographed, by higher and lower density inclusions and by voids or cracks in the
material. Thereby the variations in transmitted radiation intensity can be recorded as
images with film or other scanning devices.
13
X-rays interact with atomic orbiting electrons, and X-ray attenuation is
proportional to material density and atomic number. Neutrons interact with the
atomic nucleus, and their attenuation is proportional to material density and neutron
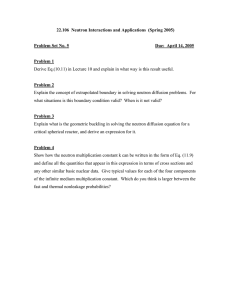
absorption of the cross section. Figure 2.1 [3] depicts the characteristic differences
between radiography of the X-ray type and neutron radiography.
Figure 2.1: Mass attenuation coefficient versus atomic number
In summary, many materials, such as metals that strongly absorb X-rays, pass
neutrons easily, and many other materials that pass X-rays easily resist the passage of
neutrons. Heavy elements such as lead, uranium, iron, and bismuth, which absorb Xrays, offer little resistance to the passage of neutrons. Conversely, light elements
such as hydrogen and lithium strongly absorb neutrons, while X-rays penetrate them
freely.
14
2.1.3
Neutron Interactions
Neutrons are uncharged particles. They interact with the nuclei of atoms in
different ways with certain probabilities depending on the target nucleus and the
neutron energy. Generally, there are two types of neutron interactions with mater:
non-scattering and scattering interactions [12].
2.1.3.1 Non-Scattering Interactions
Non-scattering reactions are also known as absorption reactions because the
neutron is absorbed by the target nucleus.
The disappearance of neutrons by
absorption is the mechanism that enables the imaging of internal structures of
objects. For a purely absorbing medium, the neutron intensity changes according to
the famous attenuation equation Σ
where I0 and I (x) are neutron
intensities of the incident beam and after traversing a distance x inside the object,
respectively, and ! is the macroscopic absorption cross section.
The most important absorption reaction is the (n,γ) reaction. This process is
also known as radiative capture, since one of the products of the reaction is γradiation. Radiative capture can occur at all neutron energies, but it is most probable
at low energies. In other words, the product nucleus is an isotope of the same
element as the original nucleus. Its mass number increases by one. The simplest
radiative capture occurs when hydrogen absorbs a neutron to produce deuterium (#" )
as shown at Figure 2.2.
15
Figure 2.2: Radiative capture
The deuterium formed is a stable nuclide. However, many radiative capture products
are radioactive and are beta-gamma emitters.
Neutrons also disappear as a result of charged-particle reactions, such as (n,p)
or (n,α) reactions. These reactions are usually endothermic and do not occur below a
threshold energy. For a few light materials, however, they are exothermic. The most
important exothermic reaction of this type is the B10 (n, α) Li7 reaction. The lowenergy cross section for this reaction is very high, and for this reason, objects
containing B10 appear very dark in thermal neutron radiography.
Occasionally, two or more neutrons are emitted when a nucleus is struck by a
high-energy neutron in reactions like (n,2n) and (n,3n). A closely related process is
the (n,np) reaction, which also occurs with highly energetic incident neutrons. Since
these reactions require high-energy neutrons, they do not contribute much to the
imaging process in thermal neutron radiography where most of the neutrons do not
have enough energy to induce such reactions.
Finally, when a neutron collides with certain heavy nuclei, the nucleus splits
into two large fragments and a number of neutrons emerge with the release of energy
in a process called fission. Unless the imaged object contains fissionable materials,
such as U235, fission should not be a concern in thermal neutron radiography.
16
2.1.3.2 Neutron Scattering
A neutron scatters from the nucleus either elastically or inelastically. If the
nucleus is unchanged in either composition or internal energy after interaction with a
neutron, the process is called elastic scattering. On the other hand, if the nucleus,
still unchanged in composition, is left in an excited state, the process is called
inelastic scattering. Inelastic scattering is shown as Figure 2.3 below. The symbols
(n,n) and (n,n') are used to denote these two processes. Inelastic scattering is a
threshold reaction. Unless the neutron energy is above a certain minimum energy,
the reaction would not occur.
Recoil kinetic energy
Figure 2.3: Inelastic scattering
The inelastic threshold energy, Et is given by
$ %&1
(
% "
where A is the target mass number and ε1 is the energy of the nucleus first excited
state. For example, the first excited state of C12 is at 4.43 MeV and the inelastic
scattering does not occur unless the neutrons have an energy greater than
"#)"
"#
4.43 4.8 ./ . Generally, the energy of the first excited state, ε1 , decreases with
increasing mass number. Therefore, as a practical matter, inelastic scattering tends to
be more important for heavy materials than for light materials in thermal neutron
radiography.
17
The scattering of neutrons inside samples has the most effect on degrading
the produced radiographs and hence the computed tomographs.
The scattered
neutrons contribute to the final image and tend to degrade the image qualitatively by
adding scattering distribution of neutrons to the image and quantitatively by changing
the number of neutrons detected at each pixel of the image. This in turn complicates
the neutron image interpretation.
2.1.4
Detection of Neutron
Neutron can be detected with radiographic film, radiographic paper,
scintillators, track-etch detectors and several other techniques. The radiographic film
and paper must be used with intermediate or conversion screens because neutrons
have little effect on photographic emulsions. Neutron scintillators emit light when
exposed to thermal neutrons. The light can be amplified by image intensifiers or
detected with a television camera. Track-etch detectors utilize a dielectric material
that can be damaged by a neutron radiation field. The radiation damage or image is
made visible by preferential chemical etching.
2.1.4.1 Neutron Image Conversion Methods for Radiographic Film
Neutrons have little effect on photographic emulsions, and intermediate, or
conversion, screens must be used to obtain an image. Conversion screens emit
detectable radiation as neutrons are absorbed, and this induced radiation exposes
conventional X-rays film. X-ray film exposure may occur directly when the test
object, conversion screen, and film are in the path of a neutron beam or indirectly
subsequent to neutron irradiation. When the indirect or transfer method is used, only
18
the screen is exposed to the neutron beam. In this case, the screen is made of
material that becomes radioactive in the neutron beam. The screen is then placed in
intimate contact with the emulsion of an X-ray film and allowed to decay, causing
transfer of the image of the test object to the film. Subsequent to exposure, film
processing is the same for neutron radiography as it is for X-rays and for gamma
radiography.
2.1.4.2 Direct Exposure Methods
Variations of the direct film technique can be selected to emphasize either
resolution or speed according to test requirements. One of the best ways to obtain
good resolution is to place a thin (0.001-0.005 in., 25.4-127 µm) gadolinium
conversion screen behind the film [3]. The speed can be doubled by using a thin
gadolinium screen in front of the film and a thicker prompt emission screen behind
the film. However, resolution is reduced by using two conversion screens. Because
of this, a single screen is most often used, and it is used in conjunction with a singlecoated film. Potentially radioactive conversion screens are also suitable for making
direct exposures, but image quality is not as high as for the prompt emission type. A
typical direct exposure method is illustrated in Figure 2.4.
Figure 2.4: Direct exposure method of making a neutron radiograph
19
2.1.4.3 The Image Transfer Method
Potentially radioactive materials are used for image transfer neutron
radiography. After a transfer screen has been exposed to a neutron beam, the screen
is placed near an X-ray film and the image is transferred to the film by
autoradiography. It usually requires many hours for the induced radioactivity of the
screen to give adequate exposure to the film. Caution must be exercised at all times
to protect personnel from the radiation.
Of several available materials, indium and dysprosium are the most often
used transfer screens [3]. Dysprosium has the greater speed. A major advantage of
the transfer method is that film is never exposed to the neutron beam. Therefore,
radioactive materials can be radiographed without film fogging due to radiation from
the specimens. The method is also useful when a neutron beam is contaminated with
high gamma radiation, as is often the case. A disadvantage of the transfer method is
its limited utility to low neutron beam intensities. The conversion screen materials
become saturated with radioactivity after a few half-life exposure times.
Consequently, long exposure times cannot be used to compensate for low neutron
beam intensities. An image transfer method is depicted in Figure 2.5.
Figure 2.5: Image transfer method for making neutron radiographs
20
2.1.4.4 Neutron Scintillators
Scintillators consist of materials that have a prompt reaction with neutrons
and an associated phosphor material. Neutron scintillators such as phosphor doped
with boron-10 or lithium-6 are very effective image converters. Neutron absorption
in the boron-10 or lithium-6 generates charged particles that cause light scintillations
in the phosphor, and the resulting light images are recorded on film. Scintillators are
usually placed behind the film. Although neutron scintillators are about 100 times as
fast as a gadolinium screen, the image contrast and resolution are not as good.
2.1.5
Image Analysis
Any analysis of a radiographic image, be it film or electronic, begins with an
understanding of how the image is formed. The relationship between the incident
neutron intensity upon an object to be radiographed and the transmitted neutron
intensity (ignoring scattering) is the simple exponential attenuation law [2].
Σ0
The transmitted neutron intensity, , is a function of the incident neutron intensity,
, and the product of the total macroscopic cross section and thickness of the object,
Σ 1. In the case of film, the degree of film darkening (photographic density, De) is
related to the neutron exposure by the film’s characteristic response curve. . Figure
2.6 shows the typical film characteristic curve. De will have a logarithmic nature as
described by
23 4log $
21
where E is the exposure of the film (transmitted neutron intensity multiplied by
time, 8) and G is the slope in the linear portion of the characteristic response curve
for the film being used. This is the manner in which images are formed on film. The
processed film’s photographic density is described by
23 9: ; <
where Io is the incident light (such as from a light box) and I is the transmitted light
through the film. In nearly all forms of digital imaging, the resulting grey level value
of any pixel making up the image may be described by
4 = & 4>3
where G is the numerical grey level value of the pixel within an image, C is the
electronic gain of the camera or imaging system (a constant), is the transmitted
neutron intensity and Goffset is the dark current, an additive offset due to electronic
noise. These equations form the basis of all radiographic image analysis. With them,
one may manipulate images to isolate terms and perform quantitative analyses or
Photographic Density, De
provide the basis for qualitative comparisons.
Log Relative Exposure, Log E
Figure 2.6: Characteristic curve
22
2.2 Digital Image Restoration
2.2.1
Digital Image Representation
Image can be defined as a two-dimension function, f(x,y), where x and y are
spatial (plane) coordinates, and the amplitude of f at any pair of coordinates (x,y) is
called the intensity of the image at that point [13]. The term gray level is refer to the
intensity of monochrome images.
individual 2-D images.
Color images are formed by combination of
In RGB color system, a color image consists of three
individual component image which is red, green and blue. So that is why many
techniques were developed to extended monochrome images to color images by
processing the three component images individually.
To convert an image that may be continuous with respect to the x and y
coordinates, and also in amplitude to digital form, we required that coordinates as
well as the amplitude to be digitized. Digitizing the coordinate values is called
sampling; digitizing the amplitude values is called quantization. Thus, when x, y and
the amplitude values of f are all finite, discreet quantities, we call the image a digital
image [13].
23
2.2.2
Image Restoration
Because of the recent advances in computer technology, digital image
restoration has received considerable attention for a large number of applications,
such as astronomy, remote sensing, medical imagery, and aerial reconnaissance [14].
Image restoration is the reconstruction of a degraded image towards the original
object by the reduction or removal of the degradations. These degradations may be
introduced during the formation, transmission and reception of the image.
For
example, an out-of-focus camera, or the relative motion between the camera and the
object, blurs the recorded picture; an image sensor circuit or a transmission channel
may introduce random noise to the picture; an aerial photograph may suffer from
distortion due to air turbulence.
Restoration techniques is different from image enhancement techniques,
which try to process the observed image to produce a more pleasing image to the
human observer, without referring to the real scene, or “original” undegraded image
[15]. Image restoration techniques try to perform an inverse transformation of the
observed degraded image to estimate the original scene. Because of this approach,
image restoration techniques are oriented toward modeling the degradations, in order
to apply an “inverse” technique.
The problem of image restoration is that it lacks easy solution. It is well
known that “real life” blurred images are hard to restore.
In practice, exact
restoration of the original scene from the observed image data may be impossible,
even with knowledge of the degrading system characteristics. This is due to the illposed nature of the image restoration problem, and the presence of observation noise.
Thus, in most practical cases, although the restoration will not be able to achieve a
magazine quality image, it might improve the utility [15].
24
2.2.3
Model of Image Degradation/Restoration Process
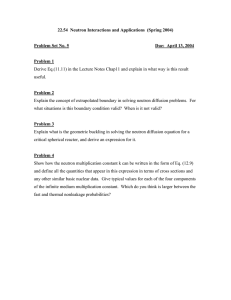
Figure 2.7 shows the degradation process [13].
Degradation process as
shown in Figure 2.7 is including degradation function together with an additive noise
term that operates on an input image f(x,y) to produce a degraded image g(x,y):
g(x,y) = H[f(x,y)] + η (x,y)
given g(x,y), some knowledge about the degradation function H, and some
knowledge about the additive noise term η(x,y), the objective of restoration is to
obtain an estimate, x,y), of the original image. We want the estimate to be as close
as possible to the original input image. In general, the more we know about H and η,
the closer x,y) will be to f(x,y).
g(x, y)
f(x, y)
Degradation
function, H
Restoration
filter(s)
+
(x, y)
Noise
n(x,y)
Degradation
Restoration
Figure 2.7: A model of the image degradation/restoration process
If H is linear, spatially invariant process, it can be shown that the degraded
image is given in the spatial domain by
g(x,y) = h(x,y) * f(x,y) + η(x,y)
where h(x,y) is the spatial representation of the degradation function and the symbol
‘*’ indicates convolution. Convolution in the spatial domain and multiplication in
25
the frequency domain constitute a Fourier transform pair [13], so we may write the
preceding model in an equivalent frequency domain representation:
G(u,v) = H(u,v)F(u,v) + N(u,v)
where the terms in capital letters are the Fourier transforms of the corresponding
terms in the convolution equation. The degradation function H(u,v) sometimes is
called the optical transfer function (OFT) , a term derived from the Fourier analysis
of optical systems. In the spatial domain, h(x,y) is referred to as the point spread
function (PSF), a term that arises from letting h(x,y) operate on a point of light to
obtain the characteristics of the degradation for any type of input.
Because the degradation due to a linear, space-invariant degradation function,
H can be modeled as convolution, sometimes the degradation process is referred to as
“convolving the image with a PSF or OTF”. Similarly, the restoration process is
sometimes referred to as deconvolution.
CHAPTER 3
METHODOLOGY
3.1 Introduction to Sample
The image used as sample in this work is the neutron radiography image
shown in Figure 4.2. The main purpose of this type of image chosen is because
neutron radiography offers one of the best techniques in non-destructive testing
(NDT) of nuclear materials and also it is widely use in industrial research. The
advantages of neutron radiography over more traditional NDT methods are, among
the others, the contrast from light nuclei and clear radiographs of highly radioactive
materials [16]. The neutron radiography image that used in this research is collected
from Malaysia Institute of Nuclear Technology (MINT) and Cobrascan Digitizer
CX-321T is use to convert the neutron radiograph to digital format. Meanwhile the
reference image use for Wiener filter, Lucy-Richardson algorithm, regularized filter
and blind deconvolution is generated using ‘checkerboard’ command in MATLAB
Image Processing Toolbox, Figure 4.1.
27
3.2 Software
The software tools used in this research is MATLAB version 7.0.0.19920
(R14) Image Processing Toolbox (IPT). The name MATLAB stands for matrix
laboratory. MATLAB is a high-performance language for technical computing. It
integrates computational, visualization, and programming in an easy-to-use
environment where problems and solutions are expressed in familiar mathematical
notation. The Image Processing Toolbox is a collection of MATLAB functions
(called M-functions or M-files) that extend the capability of the MATLAB
environment for solution of digital image processing problems.
3.3 Wiener Filter
Wiener filter is one of the earliest and best known approaches to linear image
restoration [13]. A Wiener filter seeks an estimate that minimizes the statistical
error function
#
# $ ?@ A B C
where E is the expected value operator and f is the undegraded image. The solution
to this expression in the frequency domain is
H
L
|, |#
1
G
K
DE , G
K 4, ,
, #
G
K
|, | &
, J
F
28
Where
, = the degradation function
|, |# , , , = the complex conjugate of , , |M, |# = the power spectrum of the noise
, |D, |# = the power spectrum of the undegraded image
The ratio Sη (u,v)/Sf(u,v) is called the noise-to-signal ratio. We see that if the
noise power spectrum is zero for all relevant values of u and v, this ratio becomes
zero and the Wiener filter reduces to the inverse filter.
Two related quantities of interest are the average noise power and the average
image power, defined as
NO 1
P P , .M
R
Q
where M and N denote the vertical and horizontal sizes of the image and noise arrays,
respectively. These quantities are scalar constant, and their ratio,
O 1
P P , .M
R
Q
which is also a scalar, is used sometimes to generate a constant array in place of the
function Sn(u,v)/Sf(u,v). in this case, even if the actual ratio is not known, it becomes
a simple matter to experiment interactively varying the constant and viewing the
restored results. This is a crude approximation that assumes that the functions are
constant. Replacing Sn(u,v)/Sf(u,v) by a constant array in the preceding filter equation
results in the so-called parametric Wiener filter. The simple act of using constant
array
can
yield
significant
improvements
over
direct
inverse
filtering.
29
3.4 Constrained Least Squares (Regularized) Filtering
Another well-established approach to linear restoration is constrained least
squares filtering [13]. The definition of 2D discrete convolution is
X" "
1
S, T , T P P U, :S A U, T A :
.M
YW VW
Using this equation, we can express the linear degradation model g(x,y) =
h(x,y)*f(x,y) + η(x,y), in vector matrix form, as
Z [\ & ]
For example, suppose that g(x,y) is of size M x N. Then we can form the first N
elements of the vector g by using the image elements in the first row of g(x,y), the
next N elements from the second row, and so on. The resulting vector will have
dimensions MN x 1. These also are the dimensions of f and η, as these vectors are
formed in the same manner. The matrix H then has dimension MN x MN. Its
elements are given by the elements of the preceding convolution equation.
It would be reasonable to arrive at the conclusion that the restoration problem
can now be reduced to simple matrix operation. Unfortunately this is not the case.
For instance, suppose that we are working with images of medium size; say
M=N=512. Then the vectors in the preceding matrix equation would be of dimension
262,144 x 1, and matrix H would be of dimensions 262144 x 262144. Manipulating
vectors and matrices of these sizes is not a trivial task. The problem is complicated
further by the fact that the inverse of H does not always exist due to zeros in the
transfer function. However, formulating the restoration problem in matrix form does
facilitate derivation of restoration techniques.
30
Although we do not derive the method of constrained least squares that we
are about to present, central to this method is the issue of the sensitivity of the inverse
of H mentioned in the previous paragraph. One way to deal with this issue is to base
optimally of restoration on a measure of smoothness, such as the second derivative of
an image (e.g, the Laplacian). To be meaningful, the restoration must be constrained
by the parameters of the problem at hand. Thus what is desired is to find the
minimum of criterion function, C, defined as
X1 1
= P P^2 , T_2
W0 `W0
subject to the constraint
2
aZ & [bEa c]c2
where \ is the estimate of the undegraded image, and 2 is the Laplacian operator.
The frequency domain solution to this optimization problem is given by the
expression
DE , d
, g 4, |, |2 & e|f, |2
Where e is a parameter that must be adjusted so that the constraint is satisfied (if e is
zero we have an inverse filter solution), and P(u,v) is the Fourier transform of the
function
0
h, T i1
0
1
A4
1
0
1j
0
We recognize this function as the Laplacian operator. The only unknowns in the
preceding formulation are e and c]c2. However, it can be shown that e can be
found iteratively if c]c2, which is proportional to the noise power (a scalar), is
known.
31
3.5 Iterative Nonlinear Restoration Using the Lucy-Richardson Algorithm
During the past two decades, nonlinear iterative techniques have been gaining
acceptance as restoration tools that often yield results superior to those obtained with
linear methods. The principle objections to nonlinear methods are that their behavior
is not always predictable and that they generally require significant computational
resources. The first objection often loses importance based on the fact that nonlinear
methods have been shown to be superior to linear techniques in a broad spectrum of
applications. The second objection has become less of an issue due to the dramatic
increase in inexpensive computing power over the last decade.
The nonlinear
method of choice in the toolbox is a technique developed by Richardson and by
Lucy, working independently.
The toolbox refers to this method as the Lucy-
Richardson (L-R) algorithm, but we also see it quoted in the literature as the
Richardson-Lucy algorithm.
The L-R algorithm arises from a maximum-likelihood formulation in which
the image is modeled with Poisson statistics. Maximizing the likelihood function of
the model yields an equation that is satisfied when the following iteration converges:
k)" , T k , T lSA, AT m, T
n
S, T k , T
As before, ‘*’ indicates convolution, is the estimate of the undegraded image, and
both g and h are as before. The iterative nature of the algorithm is evident. Its
nonlinear nature arises from the division by on the right side of the equation.
As with most nonlinear methods, the question of when to stop the L-R
algorithm is difficult to answer in general. The approach often followed is to observe
the output and stop the algorithm when a result acceptable in a given application has
been obtained.
32
3.6 Blind Deconvolution
The process of simultaneously estimating the PSF (or its inverse) and
restoring an unknown image using partial or no information about the imaging
system is known as blind image restoration [10]. In many other applications the
exact form of the degradation system may not be known. In such cases, it is also
desired for the algorithm to provide an estimate of the unknown degradation system
as well as the original image. The problem of estimating the unknown original
image, f and the degradation, D from the observation g is referred to as blind
deconvolution, when D represents a linear and space-invariant (LSI) system. Blind
deconvolution is a much harder problem than image restoration due to the
interdependency of the unknown parameters.
Blind deconvolution methods can be classified into two main categories
based on the manner the unknowns are estimated. With a priori blur identification
methods, the degradation system is estimated separately from the original image, and
then this estimate is used in any image restoration method to estimate the original
image. On the other hand, joint blind deconvolution methods estimate the original
image and identify the blur simultaneously. The joint estimation is typically carried
out using an alternating procedure, i.e., at each iteration the unknown image is
estimated using the degradation estimate in the previous iteration, and vice versa.
Assuming that the original image is known, identifying the degradation system from
the observed and original images (referred to as the system identification) is the dual
problem of image restoration.
Based on this observation in joint identification methods, the blind
deconvolution problem can be solved by composing two coupled successive
approximations iterations. As an example, blind deconvolution can be formulated by
the minimization of the following functional with respect to f and the impulse
response d of the degradation system:
33
. o" , o2 , b, p cqb & Zc2 & o" =1 b & o2 =2 p
where C1(f ) and C2(d) denote operators on f and d, respectively, imposing
constraints on the unknowns. The necessary condition for a minimum is that the
gradients of .o1 , o2 , b, p with respect to f and d are equal to zero.
Overall, blind deconvolution tackles a more difficult, but also a more
frequently encountered problem than image restoration.
Because of its general
applicability to many different areas, there has been considerable activity in
developing methods for blind deconvolution, and impressive (comparable to image
restoration) results can be obtained by the state-of-the-art methods [17].
34
3.7 Operational Framework
Operational framework in this research is comprise of writing a MATLAB
code for restoration process for every restoration methods used in this research,
testing the simulation using reference image, run the simulation using neutron
radiography image and analysis of restored image. If the simulation is not given the
desired result for reference image, the restoration coding must be check and
correction must be done to the coding until the simulation can be run successfully.
After the analysis of the image was done, the best restoration is determined. The best
restoration method will be applied to the sensitivity indicator image. Figure 3.1
below show the flow chart of the operational framework in this research.
Writing MATLAB code for
restoration algorithm
Testing the simulation using
reference image
Successful?
No
Yes
Run the simulation using neutron
radiography image
Analysis the restored image
Figure 3.1: Operation framework
CHAPTER 4
DATA AND ANALYSIS
4.1 Introduction
After coding is done, each restoration method is tested using reference image.
If this gives acceptable result, it means the coding is ready to be used for restoration
of neutron radiography image. The resulting restored radiography image will be
analyzed using image analysis techniques in MATLAB.
4.2 Reference Image
Reference image use for every restoration method in this study is generated
by function ‘checkerboard’ in MATLAB. This function will create the checkerboard
image as shown in Figure 4.1.
36
Figure 4.1: Reference image
The light squares on the left half of the checkerboard are white and on the
right half of the checkerboard is gray. Reference image was needed for testing
whether the simulation for restoration was work properly.
4.3 Neutron Radiography Image
The original neutron radiography image used in this study is shown as Figure
4.2 below.
Figure 4.2: Original neutron radiography image
Because of this image was too big in size and causing the simulation to run very slow
therefore this original image was crop for selected area to be analyzed to prevent the
simulation run slowly. In this study the image of spark plug was chosen. This area
of the image was comprise of minimum x-coordinate of 1231 and minimum y-
37
coordinate of 487 with length of width equal to 140 and length of height equal to
490. This region was chosen because it has many sharp edges so that the resulting
display image after restoration process will be more pronounced compared to the
original image. Figure 4.3 below show the cropped image.
Figure 4.3: Neutron radiography image that will be analyzed
1000
900
800
Number of pixel
700
600
500
400
300
200
100
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Figure 4.4: Histogram of neutron radiography image (Figure 4.3)
1
38
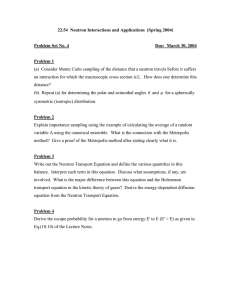
4.4 Point Spread Function (PSF) Calculation
From the original image of neutron radiography as in Figure 4.2, an area in
the image that shows the sharp edge was selected. In this study the coordinate of
selected area to be analyzed for PSF calculation is comprise of minimum xcoordinate of 611 and minimum y-coordinate of 554 with length of width equal to 24
and length of height equal to 16. Meanwhile the size of this image was about 17 x 25
pixels. By using MATLAB, the plot of pixel value in the image versus their columns
can be generate as shows in Figure 4.5 below.
100
90
Pixel value, y
80
70
60
50
40
0
5
10
15
20
25
Column, x
Figure 4.5: Graph of pixel value in the image versus column
The differentiation of the above graph will give the result as Figure 4.6.
dy/dx
Graph of dy/dx versus column
900
800
700
600
500
400
300
200
100
0
-100 0
-200
2
4
6
8 10 12 14 16 18 20 22 24 26 28
Column
Figure 4.6: Graph of dy/dx versus column
39
The shape of the graph in Figure 4.6 is Gaussian like. From this graph the full width
half maximum will be determined. The full width half maximum (FWHM) of this
graph is about 2 pixels. The FWHM of the PSF was related to corrected standard
deviation, σ by the formula [18]
FWHM ≈ 2.35σ
From the relation, the standard deviation for the graph in Figure 4.6 is about 0.85.
This standard deviation is use in MATLAB simulation for every restoration methods
proposed in this study. This value was needed to generate the PSF filter mask or
spatial filter using function ‘fspecial’. A plot of Gaussian spatial filter was shown as
Figure 4.7 below.
0.25
Intensity
0.2
0.15
0.1
0.05
0
8
6
8
6
4
4
2
column
2
0
0
row
Figure 4.7: Gaussian spatial filter
40
4.5 Result Obtained from Wiener Filter Method
(a)
(b)
(c)
(d)
Figure 4.8: (a) Blurred, noisy image. (b) Result of inverse filtering. (c) Result of
Wiener filtering using a constant ratio. (d) Result of Wiener filtering using
autocorrelation functions.
(a)
(b)
(c)
Figure 4.9: (a) Result of NR inverse filtering using Wiener filter. (b) Result of NR
using Wiener filtering with a constant ratio. (c) Result of NR using Wiener filtering
with autocorrelation functions.
41
900
800
Number of pixel
700
600
500
400
300
200
100
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.7
0.8
0.9
1
0.7
0.8
0.9
1
(a)
900
800
Number of pixel
700
600
500
400
300
200
100
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
(b)
900
800
Number of pixel
700
600
500
400
300
200
100
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
(c)
Figure 4.10: (a) Histogram of NR inverse filtering using Wiener filter. (b) Histogram
of NR using Wiener filtering with a constant ratio. (c) Histogram of NR using
Wiener filtering with autocorrelation functions.
42
4.6 Result Obtained from Regularized Filter Method
(a)
(b)
(c)
Figure 4.11: (a) Blurred, noisy image. (b) Result of image (a) restored using
regularized filter with noisepower equal to 4. (c) Result of image (a) restored using
regularized filter with noisepower equal to 0.4 and a RANGE of [1e-7 1e7]
(a)
(b)
Figure 4.12: (a) Result of restored NR image using regularized filter with
noisepower equal to 4. (b) Result of restored NR image using regularized filter with
noisepower equal to 0.4 and a RANGE of [1e-7 1e7]
43
900
800
Number of pixel
700
600
500
400
300
200
100
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.7
0.8
0.9
1
(a)
900
800
Number of pixel
700
600
500
400
300
200
100
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
(b)
Figure 4.13: (a) Histogram of restored NR image using regularized filter with
noisepower equal to 4. (b) Histogram of restored NR image using regularized filter
with noisepower equal to 0.4 and a RANGE of [1e-7 1e7]
44
4.7 Result Obtained from Lucy Richardson Filter Method
(a)
(b)
(c)
(d)
Figure 4.14: (a) Blurred, noisy image. (b) Restored image using L-R algorithm with
10 iteration. (c) Restored image using L-R algorithm with 100 iteration. (d) Restored
image using L-R algorithm with 500 iteration.
(a)
(b)
(c)
Figure 4.15: (a) Restored image using L-R algorithm with 10 iteration. (b) Restored
image using L-R algorithm with 100 iteration. (c) Restored image using L-R
algorithm with 500 iteration.
45
1000
900
800
Number of pixel
700
600
500
400
300
200
100
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.7
0.8
0.9
1
0.7
0.8
0.9
1
(a)
1000
900
800
Number of pixel
700
600
500
400
300
200
100
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
(b)
1000
900
800
Number of pixel
700
600
500
400
300
200
100
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
(c)
Figure 4.16: (a) Histogram of restored image using L-R algorithm with 10 iteration.
(b) Histogram of restored image using L-R algorithm with 100 iteration. (c)
Histogram of restored image using L-R algorithm with 500 iteration.
46
4.8 Result Obtained from Blind Deconvolution Method
(a)
(b)
(c)
(d)
(e)
Figure 4.17: (a) Blurred, noisy image. (b) Restored image using blind deconvolution
with 5 iterations. (c) Restored image using blind deconvolution with 10 iterations. (d)
Restored image using blind deconvolution with 20 iterations. (e) Restored image
using blind deconvolution with 30 iterations.
(a)
(b)
(c)
(d)
Figure 4.18: (a) Restored image using blind deconvolution with 5 iterations. (b)
Restored image using blind deconvolution with 10 iterations. (c) Restored image
using blind deconvolution with 20 iterations. (d) Restored image using blind
deconvolution with 30 iterations.
47
1000
900
800
Number of pixel
700
600
500
400
300
200
100
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.7
0.8
0.9
1
(a)
1000
900
800
Number of pixel
700
600
500
400
300
200
100
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
(b)
0.6
48
1000
900
800
Number of pixel
700
600
500
400
300
200
100
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.7
0.8
0.9
1
(c)
1000
900
800
Number of pixel
700
600
500
400
300
200
100
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
(d)
Figure 4.19: (a) Histogram of restored image using blind deconvolution with 5
iterations. (b) Histogram of restored image using blind deconvolution with 10
iterations. (c) Histogram of restored image using blind deconvolution with 20
iterations. (d) Histogram of restored image using blind deconvolution with 30
iterations.
49
4.9 Mean and Standard Deviation of the Elements of Matrix for Every Restored
Neutron Radiography Image
Mean for neutron radiography image before restoration = 0.6129
Standard deviation for neutron radiography image before restoration = 0.1613
Table 4.1: Mean and standard deviation of the elements of matrix
Restoration Method
Mean
Standard
deviation
Wiener Filter
inverse filtering
0.6128
0.1758
constant ratio
0.6121
0.1692
autocorrelation function
0.6126
0.1620
noise power=4
0.6128
0.1615
noise power=0.4
0.6128
0.1650
10 iterations
0.6037
0.1796
100 iterations
0.6035
0.1798
500 iterations
0.6030
0.1800
5 iterations
0.6035
0.1806
10 iterations
0.6034
0.1819
20 iterations
0.6034
0.1838
30 iterations
0.6033
0.1856
Regularized filter
Lucy-Richardson
Blind deconvolution
50
4.10 Restoration of Sensitivity Indicator Image
Figure 4.20 shows the restoration of sensitivity indicator from Figure 4.2
while Table 4.2 shows the statistics value of sensitivity indicator image before and
after restoration.
(a)
(b)
(c)
Figure 4.20: (a) Image of sensitivity indicator (SI) before restoration. (b) Image of SI
after using Wiener filter with autocorrelation function. (c) Image of SI after using LR algorithm with 500 iterations
Table 4.2: Mean and standard deviation value for Figure 4.20
Image statistics
Figure 4.20
(a)
(b)
(c)
Mean
0.3500
0.3495
0.3477
Standard deviation
0.2068
0.2139
0.2178
51
400
350
Number of pixel
300
250
200
150
100
50
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.7
0.8
0.9
1
0.7
0.8
0.9
1
(a)
350
300
Number of pixel
250
200
150
100
50
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
(b)
400
350
Number of pixel
300
250
200
150
100
50
0
Gray level intensity
0
0.1
0.2
0.3
0.4
0.5
0.6
(c)
Figure 4.21: (a) Image histogram of sensitivity indicator before restoration. (b)
Image histogram of SI after using Wiener filter with autocorrelation function. (c)
Image histogram of SI after using L-R algorithm with 500 iterations
CHAPTER 5
DISCUSSION
5.1 Wiener filter
Figure 4.8 shows the result of restored reference image. The blurred noisy
image as Figure 4.8 (a) was generated from original reference image (Figure 4.1).
This image was representing the image that need to be restored because usually one
of the principle degradations encountered in image restoration problems was image
blur. Figure 4.8 (b) was the result of direct inverse filtering and it was dominated by
effects of noise. Meanwhile Figure 4.8 (c) was obtained using a constant ratio of
noise average power and image average power. This approach gives a significant
improvement over direct inverse filtering. Finally, autocorrelation function was used
in the restoration and gives the result as shown in Figure 4.8 (d). This image was
close to the original, although some noise is still appearing.
After the simulation was tested using reference image and the result showed
the evidence that the Wiener deconvolution was accomplished, the same was done on
the neutron radiography image. Here the situation was different because in reference
image the blurred noisy image was generated with knowing the degraded function
and noise function. But in NR image the degraded function as well as the noise
53
function of the blurred image was not known. From the calculation of the point
spread function (PSF) or degradation function of NR image use in this study, the
standard deviation of PSF is about 0.85 and a Gaussian lowpass filter of size 7 x 7
was used. This information was used to the simulation and the resulting restored
image was shown as Figure 4.9. Figure 4.9 (a), (b) and (c) was the result obtained
using inverse filtering, constant ratio and autocorrelation function respectively. The
result shows that using autocorrelation function the image was more acceptable
compared to two other functions. The restores image in Figure 4.9 (a) and (b) show
the existence of ringing effect and the structure of the object is hard to be recognized.
Figure 4.10 was represents NR image produce by the Wiener filter in terms of
image histogram. This histogram shows the intensity levels in the restored image.
The mean and standard deviation of element of matrix of restored NR image using
Wiener filtering are shown in table 4.1. The mean of image for every three functions
used in Wiener filtering are lower than mean of original NR image but the mean for
image using autocorrelation is about 0.0004 higher than mean of image using
constant ratio method.
5.2 Regularized Filtering
Figure 4.11 shows the result of restored reference image using regularized
filtering. Figure 4.11 (a) was generated from original reference image (Figure 4.1) to
get the blurred noisy image. This image was representing the image that need to be
restored. Figure 4.11 (b) is restored image with NOISEPOWER equal to 4 and the
image was improved from the Figure 4.11 (a) but it was not a particularly good value
for NOISEPOWER. Meanwhile Figure 4.11 (c) shows the restored image with
NOISEPOWER equal to 0.4 and a RANGE of [1e-7
somewhat better than image in Figure 4.11 (b).
1e7].
This image was
54
Figure 4.12 shows the result obtained using NR image in regularized filtering.
The two images were almost the same except the image in Figure 4.12 (b) was
somewhat darker than (a). This was proven by the mean of the image where Figure
4.12(a) and (b) have the same mean value which is about 0.6128. From these mean
value, the restored image is slightly different from the original image because the
mean value for original image is 0.6129. However, the standard deviations of both
images are different (Table 4.1). Figure 4.13 shows the image histogram of the
restored NR image using regularized filtering and the shape of the two histograms
also almost the same.
5.3 Lucy Richardson (L-R) Algorithm
Figure 4.14 shows the result of restored reference image using L-R algorithm.
Figure 4.1a (a) was generated from original reference image (Figure 4.1) to get the
blurred noisy image same as before. This image was representing the image that
need to be restored. Figure 4.14 (b), (c) and (d) representing restored image with 10,
100 and 500 iteration respectively. Restored image using 10 iterations has improved
from the blurred noisy image but somewhat it was still blurry. Meanwhile the image
in Figure 4.14 (d) was only slightly sharper and brighter than result obtained using
100 iterations but it gives significant improvement than 10 iterations.
Figure 4.15 (a), (b) and (c) were the result from L-R algorithm to the NR
image. They represent 10, 100 and 500 iterations respectively. Further increase in
the number of iterations did not produce dramatic improvements in restored NR
result. It can be seen as in Table 4.1, the mean and standard deviation values of these
three iterations were slightly different. The shapes for all three image histogram for
L-R algorithm (Figure 4.16) were almost the same.
55
5.4 Blind Deconvolution
The generated blurred noisy image and result of restored reference image
using blind deconvolution are shown in Figure 4.17. Four numbers of iterations 5,
10, 20 and 30 were used to perform the deconvolution process. As the number of
iterations increases, the restored images become more close to the original reference
image (Figure 4.1).
The result obtained for restored NR image using blind deconvolution is
shown as in Figure 4.18. The numbers of iterations used were the same as the ones
used for reference image. Result for NR image shows that as the number of iteration
increases the image become darker and lack of sharp edge. The mean and standard
deviation values of the NR image decreased as the number of iterations increased
(Table 4.1). But restoration using 10 and 20 iteration shared the same mean value
and the only different was the standard deviation value of that image. Figure 4.19 is
the image histogram of the restored image using blind deconvolution.
5.5 Restoration of Sensitivity Indicator Image
Throughout the analysis of the restored images for all proposed methods, it
was found that Wiener filtering using autocorrelation function and Lucy-Richardson
algorithm with 500 iterations gave the best result for restoration of neutron
radiography images. These two methods were applied to the sensitivity indicator
image to find out how the restored image of sensitivity indicator would be like.
Figure 4.20 and Figure 4.21 show the restored images and histograms of them while
Table 4.2 shows the statistics of sensitivity indicator image before and after
restoration.
56
Sensitivity indicator (SI) is one of the image quality indicators that has been
accepted internationally as a standard for neutron radiography. It consists of four
steps of a plastic material, with holes and gaps built in to examine the resolution
available. Its values are based on the film reader’s ability to see the smallest size
hole or gap that can be resolved by the reader. Figure 5.1 shows the photo of
sensitivity indicator. Visual inspection of the image of the SI provides subjective
information regarding total radiographic sensitivity with respect to the step-block
material as well as subjective data regarding detrimental levels of gamma exposure.
So it was crucial to view the image of SI. Figure 4.20 (b) and (c) show that the edge
step of the SI was more apparent than original image.
Figure 5.1: Sensitivity indicator
CHAPTER 6
CONCLUSION AND RECOMMENDATION
6.1 Conclusion and Recommendation
Image in any form is never an exact representation of the object under
observation because it is always corrupted by the imaging system itself. Neutron
radiography image also encounters the same problem. That is why the restoration
process is important to get the better result. Based on the result obtained from the
proposed restoration methods in this study, all four restoration methods which were
Wiener filter, regularized filter, Lucy-Richardson algorithm and blind deconvolution
can be used as neutron radiography image restoration methods.
Through the analysis of the restored neutron radiography image for every
restoration method, the best and effective result for neutron radiography are by using
Weiner filter with autocorrelation function and Lucy-Richardson (L-R) algorithm
with 500 iterations compared to other methods considered in this study. But between
these two methods Weiner filtering with autocorrelation function gives the result
faster than L-R algorithm. So if someone wants a faster method, Weiner filter with
autocorrelation is the best restoration method to choose.
58
In this study there were several limitations. One of them was the noise
function for the neutron radiography image for every restoration method was not
known. The noise function in this study was assumed. It was recommend that for
the future study the noise function that contributes to the blurring effect should be
determined by doing experiment. In determination of standard deviation of PSF, the
suitable edge image chosen for the calculation is not very sharp. Suppose the edge
image for the calculation must be sharp.
Besides the proposed restoration method in this study, there were another
methods that can be tested for neutron radiography restoration process. This method
was called Kalman filtering. The Kalman filters have long been used for image
restoration [19]. Kalman filtering has proven effective in restoring images degraded
by light to moderate blurring [7]. Another effective neutron radiography image
restoration method also has been presented, which uses combination of complex
wavelet transform (CWT) and Lucy-Richardson (L-R) algorithm [11]. So it was
novels finding if future study in the field of neutron radiography image restoration
was try to combine the wavelet transform with other deconvolution method besides
the L-R algorithm.
59
REFERENCES
1. Spowart, A. R. Neutron Radiography. Journal of Physics E: Scientific
Instruments. 1972. 5: 497-510.
2. Heller, A. K. and Brenizer, J. S. Neutron Radiography. In: Anderson, I. S. (Eds.).
Neutron Imaging and Applications, Neutron Scattering Applications and
Techniques. USA: Springer Science Business Media. 67-80; 2009.
3. Bray, D. E. and McBride, D. (Eds.). Nondestructive Testing Techniques. Canada:
Wiley-Interscience Publication. 1992.
4. Hassan, M. H. Point Scattered Function (PScF) for Fast Neutron Radiography.
Nuclear Instruments and Methods in Physics Research B. 2009. 267: 2545–2549.
5. Paul, M. (Ed.). Nondestructive Testing Handbook: Radiography and Radioactive
Testing. 2nd ed. USA: American Society for Nondestructive Testing. 1985.
6. Jiyoung
Park.
Neutron
Scattering
Correction
Functions
for
Neutron
Radiographic Images. Ph. D Thesis. University of Michigan; 2000.
7. Aziz Ghani Qureshi. Kalman Filtering for Digital Image Restoration. Ph. D
Thesis. Queen’s University; 1991.
60
8. Guan L. and Ward, R. K. Restoration of Randomly Blurred Images by the Wiener
Filter. IEEE Transaction on Acoustics, Speech, and Signal Processing. 1989.
37(4): 589-592.
9. Mesarovic, V. Z., Galatsanos, N. P. and Katsaggelos, A. K. Regularized
Constrained Total Least Squares Image Restoration. IEEE Transactions on Image
Processing. 1995. 4(8): 1096-1108.
10. Kundur, D. and Hatzinakos, D. Novel Blind Deconvolution Scheme for Image
Restoration using Recursive Filtering. IEEE Transactions on Signal Processing.
1998. 46(2): 375-390.
11. Wei, J. Image Restoration in Neutron Radiography Using Complex-Wavelet
Denoising and Lucy-Richardson Deconvolution. 8th International Conference on
Signal Processing. November 16-20. Beijing: IEEE Conferences.2006.
12. Magdy Shehata Abdelrahman. Scattering Correction and Image Restoration in
Neutron Radiography and Computed Tomography. Ph. D Thesis. University of
Texas, Austin; 2000.
13. Gonzalez, R.C., Woods, R.E. and Eddins, S. L. Digital Image Processing using
MATLAB. USA: Pearson Prentice Hall. 2004.
14. Philip, C. One-Dimensional Processing for Adaptive Image Restoration.
Technical Report 501. Massachusetts Institute of Technology; 1984.
15. Koch Shlomo. Restoration of Spatially Varying Images Using Multiple Model
Extended Kalman Filters. Ph. D. Thesis. Rensselaer Polytechnic Institute; 1992.
61
16. Casalta, S., Daquino, G. G., Metten, L., Oudaerta, J. and Van de Sandea, A.
Digital Image Analysis of X-ray and Neutron Radiography for the Inspection and
the Monitoring of Nuclear Materials. NDT&E International. 2003. 36: 349-355.
17. Aggelos, K., Katsaggelos, S., Derin B. and Chun-Jen T. Iterative Image
Restoration. In: Alan, C. B. The Essential Guide to Image Processing. 2nd ed..
New York: Elsevier Inc. 349-383; 2009.
18. Eldevik, K., Nordhoy, W. and Skretting, A. Relationship Between Sharpness and
Noise in CT Images Reconstructed with Different Kernels. Radiation Protection
Dosimetry. 2010. doi:10.1093/rpd/ncq063; 1-4.
19. Fengyun, Q., Yong, W., Mingyan, J. and Dongfeng, Y. Adaptive Image
Restoration Based on the Genetic Algorithm and Kalman Filtering. Third
International Conference on Intelligent Computing. August 21-24. China: 2007.
742-750.
62
APPENDIX A
Codes for Wiener Filtering
f=imread('E:\kalman\13.jpg');
g=imcrop(f,[1231 487 140 490]);
h=im2double(g);
j=rgb2gray(h);
figure;
imshow(j,[]);title('original');
PSF=fspecial('gaussian',[7 7],0.85);
i=edgetaper(j,PSF);
fr1=deconvwnr(i,PSF);
%assume signal-to-power ratio is zero
figure;
imshow(fr1,[]);title({'result of inverse filtering'});
noise = imnoise(zeros(size(i)), 'gaussian', 0, 0.001);
%gaussian noise with mean=0, variance=0.001
Sn=abs(fft2(noise)).^2;
%noise power spectrum
nA=sum(Sn(:))/prod(size(noise));
%noise average power
Sf=abs(fft2(i)).^2;
%image power spectrum
fA=sum(Sf(:))/prod(size(i));
%image average power
R=nA/fA;
%ratio of average noise power and average image power
fr2=deconvwnr(i,PSF,R);
%restored image using constant ratio
figure;
imshow(fr2,[]);title({'result of Wiener filtering using constant
ratio'});
NCORR=fftshift(real(ifft2(Sn)));
ICORR=fftshift(real(ifft2(Sf)));
fr3=deconvwnr(i,PSF,NCORR,ICORR); %autocorrelation function in the
restoration
figure;
imshow(fr3,[]);title({'Result of Wiener filtering using
autocorrelation function'});
63
APPENDIX B
Codes for Regularized Filtering
f=imread('E:\kalman\13.jpg');
g=imcrop(f,[1231 487 140 490]);
h=im2double(g);
j=rgb2gray(h);
figure;
imshow(j,[]);title({'h'});
PSF=fspecial('gaussian',[7 7],0.85);
i=edgetaper(j,PSF);
fr1=deconvreg(i,PSF,4);
figure;
imshow(fr1,[]);title('Constrained Least Square,
NOISEPOWER=4');
fr2=deconvreg(i,PSF,0.4,[1e-7 1e7]);
figure;
imshow(fr2,[]);title('Constrained Least Square,
NOISEPOWER=0.4');
64
APPENDIX C
Codes for Lucy-Richardson Algorithm
f=imread('E:\kalman\13.jpg');
g=imcrop(f,[1231 487 140 490]);
h=im2double(g);
h=rgb2gray(h);
figure;
imshow(h,[]);title('original');
%
PSF=fspecial('gaussian',[7 7],0.85); % Gaussian PSF 7 x 7
i=edgetaper(h,PSF);
SD=0.01;
%
DAMPAR=10*SD;
LIM=ceil(size(PSF,1)/2);
WEIGHT=zeros(size(i));
WEIGHT(LIM+1:end-LIM, LIM+1:end-LIM)=1;
%
NUMIT=10; % number of iterations
fr1=deconvlucy(i,PSF,NUMIT,DAMPAR,WEIGHT);
figure;
imshow(fr1,[]);title('NUMIT=10');
%
NUMIT=100; % number of iterations
fr2=deconvlucy(i,PSF,NUMIT,DAMPAR,WEIGHT);
figure;
imshow(fr2,[]);title('NUMIT=100');
%
NUMIT=500; % number of iterations
fr3=deconvlucy(i,PSF,NUMIT,DAMPAR,WEIGHT);
figure;
imshow(fr3,[]);title('NUMIT=500');
65
APPENDIX D
Codes for Blind Deconvolution
f=imread('E:\kalman\13.jpg');
g=imcrop(f,[1231 487 140 490]);
h=im2double(g);
h=rgb2gray(h);
figure;
imshow(h,[]);title('original');
% prepare PSF
PSF=fspecial('gaussian',[7 7],0.85); % Gaussian PSF 7 x 7
i=edgetaper(h,PSF);
% Start restoring
SD=0.01;
DAMPAR=10*SD;
LIM=ceil(size(PSF,1)/2);
WEIGHT=zeros(size(i));
WEIGHT(LIM+1:end-LIM, LIM+1:end-LIM)=1;
INITPSF=ones(size(PSF));
%
NUMIT=5; % number of iterations
[fr1,PSFe]=deconvblind(i,INITPSF,NUMIT,DAMPAR,WEIGHT);
figure,imshow(fr1,[]);
title('NUMIT=5');
%
NUMIT=10; % number of iterations
[fr2,PSFe]=deconvblind(i,INITPSF,NUMIT,DAMPAR,WEIGHT);
figure,imshow(fr2,[]);
title('NUMIT=10');
%
NUMIT=20; % number of iterations
[fr3,PSFe]=deconvblind(i,INITPSF,NUMIT,DAMPAR,WEIGHT);
figure,imshow(fr3,[]);
title('NUMIT=20');
%
NUMIT=30; % number of iterations
[fr4,PSFe]=deconvblind(i,INITPSF,NUMIT,DAMPAR,WEIGHT);
figure,imshow(fr4,[]);
title('NUMIT=30');