- , Exam EM311M
advertisement

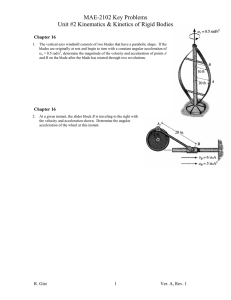
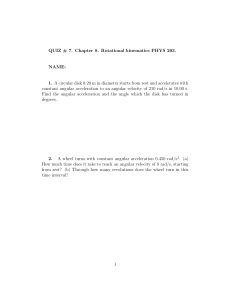
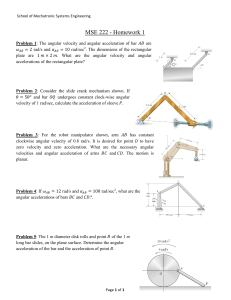
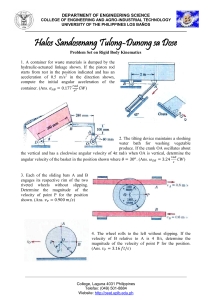
- EM311M Dynamics Exam 3 Monday, Dec 1, 2003 - 1. Use integration to compute the product of inertia I, for a triangle below. (5 points) , 2. / I System of coordinates Ozyz is rotating with respect to a fixed system of coordinates ' ~ X Y around Z the Z = a axia with a constant angular velocity w. Particle P is moving with a constant velocity vector v = (vx, 0,O) in the fixed system of coordinates. Compute the Coriolis acceleration of the particle in frame Oxyz, at the instaat when the two systems coincide with each other. (5 points) - 3. Derive the principle of angular impulse and momentum for an arbitrary system of particles. (5 points) &&&* :0 #'rat. 0 C vc* L 7 0 - r* . i P 4. Analym the two scenarios depicted below. In which case do you expect a smaller initial acceleration of the system ? Explain, why. (5 points) a- 5. Derive the formula for the kinetic energy of a rigid body undergoing an arbitrary planar motion. (5 points) tJ To, 0, /err & - 4 f 4 "J"C'w ' &#/$,"I+ I" a) prqg,0 1 CWJ, a#,O J I ', !5 6. The %kg slender bar and K-kg block are released h m rest in the position shown. If friction is negligible, what is the block's acceleration at that instant? (25 points) 7. The slender bar is released from rest with 6' = 45" and f d s a distance h = l m onto the smooth floor. The length of the bar is 1 m and its mass is 2 kg. If the coefficient of restitution of the impact is e = 0.4, what iis the angular velocity of the bar just after it hits the floor? (25 points) \ 8. The bar shown below ie etationary relative to an inertial reference frame when the force F = 12k (N) is applied at the right end of the bar. No other forces or couples act on the bar. Determine the bar's angular acceleration relative to the inertid reference frame. (25 points) Skp 1 . *"/c kuroz of- t>&a & 0 1 \ 9 (bonus). The slender bar of length 1 and mass m is pinned to the Gshaped bar at 0.The L-shaped bar rotates about the vertical a x i ~with a constant angular velocity wo. Determine the value of uo necessary for the bar to remain at a constant angle B relative to the vertical. (25 points) sqah, KYZ +h *t/p/z, LsLUD/xlC "s d d c d 6.w- + mart. 2", \ , 1 N h +& 9-Wdru1uf __c_. "" "a' +e z~wudcc 6-