ME 4710 Motion and Control
advertisement

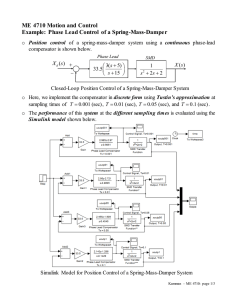
ME 4710 Motion and Control Example: Phase Lead Control of a Weighted Sled o Consider position control of a weighted sled system using a continuous phase-lead compensator Phase Lead X d ( s) 155 s 26 51 26 s 155 Valve 16641 s 178.7 s 15773 2 Weighted Sled 13.227 s ( s 20.7) X (s) Closed-Loop Position Control of a Weighted Sled System o In the Simulink model below, we model closed loop control of the weighted sled using both continuous and digital control. The embedded MATLAB function allows us to implement the compensator directly as a difference equation. o The coefficients of the difference equation depend on the sampling time T . The difference equation used here is the same equation that would be coded into the digital controlling software. (e.g. LabVIEW code) o The effects of saturation and dead-band are included. Kamman – ME 4710: page 1/3 o To run the Simulink file, values for the gain (Gain), desired position (DesiredPosition), sample time (T), and the maximum time (tmax) for the simulation must be entered in the MATLAB workspace. o The file “DigitalControlDemoMaster.m” can be used to plot command and position responses for continuous control and digital control (with different sample times). o The difference equation coded in the MATLAB embedded function was developed from the continuous compensator using Tustin’s approximation. Using 155/ 26 2 z 1 26 T z 1 U (s) s 26 Gc ( s ) E (s) s 155 2 z 1 155 T z 1 After some algebraic manipulation, this equation can be reduced to 26T 2 26T 2 1 155T 2 1 U ( z) E ( z ) z E ( z ) 155T 2 155T 2 z U ( z ) 155T 2 This is equivalent to the difference equation 26T 2 26T 2 155T 2 u (k ) e ( k ) e ( k 1) 155T 2 155T 2 u (k 1) 155T 2 o Here, e(k ) and u (k ) represent the signal values at the present time, and e(k 1) and u (k 1) represent the signal values at the previous time step. o The figures below show results for the compensator command and the sled position response for continuous and series of discrete compensators with Variable Value Gain 51 Desired Position 1 (in) Sample Times (0.001, 0.005, 0.01, 0.03) (sec) o The Bode diagram of the closed loop system is also shown, indicating a closed loop bandwidth of approximately 60 (rad/s) 9.55 (Hz) . For good results, we should sample at approximately f 20(9.55) 191 (Hz) . This corresponds to a sample time of T 0.005 (sec) . Kamman – ME 4710: page 2/3 Compensator Commands Sled Position Response Closed Loop Frequency Response Kamman – ME 4710: page 3/3