ME 4590 Dynamics of Machinery
advertisement

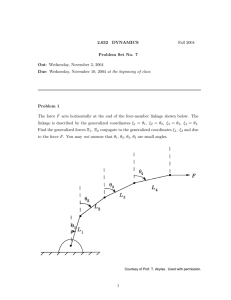
ME 4590 Dynamics of Machinery Principle of Virtual Work Principle of Virtual Work If a mechanical system whose configuration is defined by a set of independent generalized coordinates qk (k 1,..., n) is in static equilibrium, then the generalized force associated with each of the qk (k 1,..., n) must be zero. That is, Fqk 0 (k 1, , n) . Recall that if a system has "n" degrees of freedom, then "n" independent generalized coordinates are required to completely define its configuration. Hence, for an "n" degree of freedom system in static equilibrium, we can write "n" independent equilibrium equations. Example For the simple pendulum shown, we can calculate the torque M required to hold the bar at some angle by using the principle of virtual work as follows: M v F W G M B 0 mg j C i S j Mk k L 2 or M mg L2 S Note: The contribution of the weight force could also have been calculated using the potential energy function for weight. That is, F W L L mg C mg S . 2 2 Kamman – ME4590: page 1/1