6 ASTER datasets and derived products for global glacier monitoring CHAPTER
advertisement

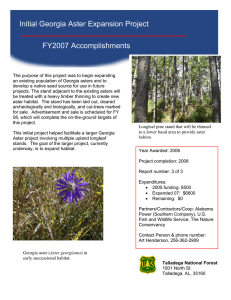
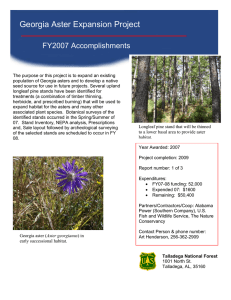
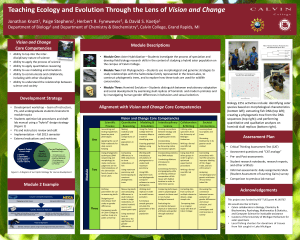
CHAPTER 6 ASTER datasets and derived products for global glacier monitoring Bhaskar Ramachandran, John Dwyer, Bruce H. Raup, and Jeffrey S. Kargel ABSTRACT This book investigates a wide selection of the world’s glaciers and the status of remote-sensing and GIS technologies designed to address their global monitoring in this age of rapid climate change impacts on glaciers and increasing awareness of the policy and economic relevance of glaciers in areas as diverse as water resources and geohazards. This chapter focuses on an important part of the data component, especially data from the Advanced Spaceborne Thermal Emission and Reflection radiometer (ASTER) project, which also spawned the Global Land Ice Measurements from Space (GLIMS) project as an ASTER Science Team member project (see Foreword by Hugh Kieffer). ASTER’s combination of sensor systems, spanning the visible through thermal infrared and its stereo-imaging capability, the high radiometric and geometric fidelity of the cameras, combined with a liberal data dissemination policy for glacier images, have made it a favored instrument for glacier remote-sensing studies. Operational use of the instrument with on-demand targeting has also aided specific studies ranging from preplanned field campaigns to rapid response to glacier-related disasters. 6.1 INTRODUCTION GLIMS is an international consortium established to facilitate the acquisition and analysis of remotely sensed satellite images of glaciers worldwide. These images are used to monitor and evaluate changing glacier extent and dynamics, and the implications of these changes for people and the environment. Although GLIMS has benefited from data derived from many passive and active remote-sensing instruments, and ground-based observations as well, ASTER data remain a primary source. The instrument has three telescopes and associated sets of sensors, one for each of the wavelength ranges, VNIR, SWIR, and TIR (visible and near-infrared, shortwave infrared, and thermal infrared, respectively), an image swath width of 60 km, and ground resolutions of 15 m/pixel for VNIR, 30 m/pixel for SWIR, and 90 m/pixel for TIR. The instrument is described elsewhere in detail (Ramachandran et al. 2011), but hallmarks of its capabilities include its broad multispectral and thermal imaging range, its exquisite pointing stability (which partly stems from the Terra spacecraft’s high mass), and its systematic stereoscopic imaging in VNIR band 3. The multispectral response of the sensor system to glacier target materials is described theoretically in Chapter 3 of this book by Furfaro et al., in practice in Chapter 4 by Kääb et al., and as used for glacier mapping in Chapter 2 by Bishop et al. Fig. 4.2 depicts ASTER’s spectral wavelengths for all three sensors juxtaposed alongside those of Landsat ETMþ and widely used radar bands. The on-demand nature of ASTER data acquisition and the ability to optimize acquisitions (via seasonality, telescope pointability, instrument gain 146 ASTER datasets and derived products for global glacier monitoring settings, etc.) to suit glacier monitoring help support the GLIMS project’s data requirements. ASTER VNIR and SWIR data have been invaluable in glacial landscape classification, glacier mapping, flow velocity vector extraction, glacier lake mapping, snow line determinations, and other fundamental investigations of glacier dynamics. Digital terrain data, used both to orthorectify satellite images and to derive and analyze three-dimensional glacial and landscape parameters, holds special relevance to the GLIMS project, and thermal data from TIR are increasingly being applied to glacier studies. Kieffer et al. (2000), Bishop et al. (2004), and Raup and Kargel (2012) describe details of the GLIMS project, what it entails, its objectives and limitations, its organization, and its reliance on ASTER, Landsat, and other complementary data sources used to analyze, monitor, and map glaciological phenomena worldwide. Raup et al. (2000) describe the initial ASTER image acquisition plans. Kargel et al. (2005) provide an assessment of how satellite-derived multispectral data contribute to GLIMS, and, along with Kääb et al. (2003a) and Raup et al. (2007), describe and showcase some of the leading technologies used for ASTER image processing and glacier data extraction from such imagery. Kääb et al. (2003b) and Kargel et al. (2011) highlight the value and role of ASTER data in the analysis of glacier hazards, and Kargel et al. (2010, 2012a, b) and Bolch et al. (2012) show the central relevance of ASTER data and GLIMS glacier analysis to pressing scientific matters related to public education, public safety, and policy. These, among many other studies and reviews, many of them cited in this book or comprising the chapters of this book, show the wide versatility and importance of ASTER and other multispectral imaging data in glaciological monitoring and studies. In this chapter we briefly review ASTER’s liberal data access and use for glacier studies in GLIMS, summarize the technical calibrations and corrections and various standard products, including several important higher level products, and summarize the types of ASTER data acquisitions involved in the GLIMS project. 6.2 ASTER DATA ACCESS AND USE POLICY The National Aeronautics and Space Administration’s (NASA) data and information policy advo- cates full and open sharing of all data with the research and applications communities, academia, private industry, and the general public. In line with such a policy, the following ASTER products are available to the general public at no charge through NASA’s Reverb interface: http://reverb.echo.nasa. gov/reverb/ . ASTER L1B Registered Radiance at the Sensor (only for geographical coverage over the U.S. and its territories). . ASTER Global Digital Elevation Model (GDEM). . North American ASTER Land Surface Emissivity Database (NAALSED). The ASTER L1B datasets over the U.S. and its territories are also accessible via the LP DAAC (Land Processes Distributed Active Archive Center) data pool: https://lpdaac.usgs.gov/get_data/data_ pool and also through the GloVis interface: https://lpdaac.usgs.gov/get_data/glovis All NASA-funded researchers and their affiliates as well as approved educational users may order all ASTER data products (L1A, L1B, and higher level) directly from the LP DAAC at no charge. The LP DAAC maintains a list of people eligible to receive ASTER data at no cost; the list is corroborated and approved both by the GLIMS project PI (Jeff Kargel, University of Arizona) and a project scientist at NASA Headquarters (Woody Turner). All ASTER data products (except NAALSED) are orderable, for a charge, through the Japanese Space Systems Earth Remote Sensing Division WWW IMS interface at http://ims.aster.ersdac. jspacesystems.or.jp/ims/html/MainMenu/MainMenu. html Specific redistribution policies apply to the different ASTER products acquired from LP DAAC. NAALSED data are not subject to any redistribution restrictions. ASTER GDEM products are subject to certain redistribution and citation requirements. NASA-affiliated and educational users of ASTER data received from LP DAAC are bound by certain restrictions to only redistribute acquired data to other researchers and educators. No restrictions on subsequent use, sale, or redistribution exist for ASTER data products purchased from LP DAAC. Consult the following site for additional details: https://lpdaac. usgs.gov/products/aster_policies ASTER data 147 6.3 ASTER DATA The ASTER instrument, launched as part of the NASA Earth Observing System’s (EOS) Terra platform’s payload of instruments in December 1999, is a unique multispectral sensor system that evolved through a well-cultivated U.S.–Japan collaboration. Plafcan (2011), who studied the international political underpinnings of this collaboration, calls this process ‘‘technoscientific diplomacy’’, which led to the design and launch of a successful tripartite sensor suite that defines the ASTER instrument. ASTER’s VNIR, SWIR, and TIR sensor data cater to a wide variety of geophysical and biophysical applications (Ramachandran et al. 2011), including science team investigations in volcanology, urban development, coastal change, forestry, and other applications areas; GLIMS is the official ASTER glacier investigation project. ASTER’s uniqueness stems from its additional backward-viewing VNIR band (band V3B) that enables stereoscopic data observations, and an unprecedented multispectral capability in the SWIR (six bands) and TIR (five bands) wavelengths. Tables 6.1 and 6.2 provide ASTER’s baseline performance requirements. The ASTER Ground Data System (GDS) facility at the Earth Remote Sensing Data Analysis Center (ERSDAC) in Tokyo, Japan processes ASTER Level 1 data (L1), which is transmitted to the Land Processes Distributed Active Archive Center (LP DAAC) in Sioux Falls, SD. LP DAAC archives the L1 data and creates higher level products for its nonpaying users and paying federal partners, while all other paying user orders are handled by ASTER GDS. Watanabe et al. (2011) provide a succinct account of the various elements of the joint U.S.–Japan ASTER mission including the mission operations, production, data product suites, and data dissemination in both countries. Daucsavage et al. (2011) describe the historical and contemporary ASTER data management experience at LP DAAC. 6.3.1 Performance of ASTER VNIR, SWIR, and TIR 6.3.1.1 Embeo_h, lm jombeo_h (doveryai, no proveryai: Trust, but verify) This Russian proverb, made famous in English by a former American President, applies to scientific uses of any remote-sensing dataset. The ASTER science and engineering teams have worked hard with calibrations and corrections to make ASTER data (both lower level and higher level standard data products, defined below) as quantitatively reliable and useful as possible, as the sections below indicate. Nevertheless, glaciologists and other researchers have applied many validation tests to assess the reliability and accuracy of glacier measurements using ASTER and other remote-sensing data. These efforts helped to characterize the behavior of the operational ASTER system, to identify problems with early data acquisitions, to improve geometric correction algorithms, and to understand lower level and higher level datasets, their uses, and artifacts. In fact, most validation work conducted for GLIMS (some reported in this volume) has supported the high quality of ASTER image and higher level data products; however, we must constantly ensure that we practice quantitatively accurate glacier applications using ASTER or any remote-sensing data. Below, we will take as one example a simple validation test of a single TIR scene—not a definitive and full validation, but an anecdote sufficient to illustrate the need for ASTER users (indeed, users of any remote-sensing dataset) to take charge of these data, to understand them, to test them to their limits, and to validate final glacier assessments, measurements, and products derived from ASTER and other remote-sensing data. This chapter deals strictly with the sensor systems and standard data-processing stream, and we do not consider at all the additional data processing and human links involved with extraction of glacier information. Chapter 7 is mainly a test of the human element as well as higher level analysis algorithms in the delineation of glacier boundaries, whereas Chapters 2, 3, 4, and 5 pertain to glacier assessments using ASTER and other remotesensing data. 6.3.1.2 Performance overview The ASTER performance specifications for absolute radiometric accuracy of VNIR and SWIR bands are defined as better than 4% at highlevel input radiance. The absolute accuracy of the TIR bands is specified at 3 K at 200–240 K, 2 K at 240–270 K, 1 K at 270–340 K, and 2 K at 340–370 K. The geometric performance details for intratelescopic band-to-band registration is <0.1 pixel, and <0.2 pixel for intertelescopic band-toband registration. Well past its original design lifetime, the ASTER instrument (sans the SWIR sensor) continues to perform well, as its radiometry 148 ASTER datasets and derived products for global glacier monitoring Table 6.1. ASTER: baseline performance requirements—1 (spectral range, radiometric and spatial resolution, accuracy, and signal quantization levels). Sensor subsystem Band No. Spectral range (mm) Radiometric resolution Absolute accuracy () VNIR 1 2 3N 3B 0.52–0.60 0.63–0.69 0.78–0.86 0.78–0.86 NED NED NED NED 4% 4% 4% 4% 15 15 15 15 m m m m 8 8 8 8 bits bits bits bits SWIR 4 5 6 7 8 9 1.600–1.700 2.145–2.185 2.185–2.225 2.235–2.285 2.295–2.365 2.360–2.430 NED 0:5% NED 1:3% NED 1:3% NED 1:3% NED 1:0% NED 1:3% 4% 4% 4% 4% 4% 4% 30 30 30 30 30 30 m m m m m m 8 8 8 8 8 8 bits bits bits bits bits bits TIR 10 11 12 13 14 8.125–8.475 8.475–8.825 8.925–9.275 10.25–10.95 10.95–11.65 NEDT 0:3% NEDT 0:3% NEDT 0:3% NEDT 0:3% NEDT 0:3% 90 90 90 90 90 m m m m m 12 12 12 12 12 bits bits bits bits bits and geometry are carefully calibrated and corrected. Nevertheless, CCD sensitivity is decreasing over time and is being tracked, and radiances are rigorously corrected accordingly (Sakuma et al. 2011). Engineering models for the future of ASTER entail many more years of operations, with the number of years of future longevity connected to how the instrument is used operationally. 6.3.1.3 Radiometric calibration The sensor electronics in any orbiting electrooptical remote-sensing system are expected to degrade, which manifests in their changing sensor responses over time. The 13-year-old Terra ASTER instrument is no exception evidenced by the gradual changes in VNIR (Arai et al. 2011) and TIR (Tonooka 2011) radiometric responses. SWIR sensor responses had been somewhat more stable, with sensitivity drifts that were almost linear and, thus, predictable and correctable; however, starting in mid-2007, its detector temperature started rising gradually, thus impacting data quality. Since April 2008, even though the SWIR sensor continues to gather observations, the images are fully saturated and show severe striping, and hence do not yield any useful data. ASTER’s radiometric calibration (which ensures the sensor’s known accuracy and precision) is based 0.5% 0.5% 0.5% 0.5% 3K 2K 1K 2K (200–240 (240–270 (270–340 (340–370 Spatial resolution K) K) K) K) Signal quantization levels on coefficients that are generated and maintained by ASTER GDS in an evolving, periodically updated radiometric calibration coefficients (RCC) database. These coefficients were evaluated during the preflight test period with the aid of integration spheres. This was followed by in-flight evaluation using onboard calibration (OBC) and vicarious (ground-based) calibration data, which are described in detail by Arai and Tonooka (2005), Arai et al. (2011), and Tonooka (2011) for the sensor subsystems. Both VNIR and SWIR sensor systems have calibration units that include a highly stable halogen lamp, optics to collect radiation and direct it as a reference beam to the radiometer, and photodetectors to monitor lamp radiation and reference beam flux. The TIR system has a high emissivity reference plate (blackbody) for onboard calibration. The ASTER Science Team members in the U.S. and Japan are actively involved in calibration and validation activities, and ASTER GDS is responsible for maintaining and managing the radiometric calibration database. The nature of changes in spectral response functions varies among the three sensors and consequently calls for specifically tailored calibration correction mechanisms. Calibration also varies according to the correction function applied based on radiometric changes observed via both vicarious and onboard sources. Table 6.3 sum- ASTER data 149 Table 6.2. ASTER: baseline performance requirements—2 (cross-track coverage and pointing, VNIR optics, FOV, IFOV, MTF, duty cycle etc.). Parameter Value Swath width 60 km VNIR cross-track coverage 318 km SWIR cross-track coverage 116 km TIR cross-track coverage 116 km VNIR cross-track pointing 24.00 SWIR cross-track pointing 8.55 TIR cross-track pointing 8.55 Stereo base-to-height ratio 0.6 (along-track) Setting angle between nadir and aft telescopes 27.60 Focal length of the VNIR nadir system 329 mm Detector size of the VNIR focal plane 7 mm Field of view VNIR: 6.09 (nadir), 5.19 (aft), SWIR: 4.9 , TIR: 4.9 Instantaneous field of view VNIR: 21.5 mrad (nadir), 18.6 mrad (aft), SWIR: 42.6 mrad, TIR: 128 mrad Modulation transfer function at Nyquist frequency 0.25 (cross-track), 0.20 (along-track) Band-to-band registration 0.2 pixels (intratelescope), 0.3 pixels (intertelescope) Duty cycle 8% (VNIR and SWIR), 16% (TIR) VNIR data rate 62 mbps SWIR data rate 23 mbps TIR data rate 4.2 mbps Peak data rate 89.2 mbps Mass 406 kg Peak power 726 W marizes the ASTER GDS RCC databases since February 2005 when ASTER Version 3 products were implemented. The application of Version 3.00 through 3.11 databases varies for each sensor as a function of the acquisition date following the Terra ASTER launch in December 1999. The actual performance of the sensor subsystems has been determined by imaging of sharp edges, such as engineered shorelines and the lunar limb. The sensors’ responses seen in these images show small but significant departures from square waves (perfect focus), where the so-called modulation transfer function (MTF) indicates what may be described as blurring of the edge. Blurring probably has both optical and electronic origins. For each of the sensor subsystems, the cross-track and alongtrack responses (lines versus samples in the images) are slightly different, with further differences occur- 150 ASTER datasets and derived products for global glacier monitoring Table 6.3. ASTER GDS radiometric calibration coefficients: versioning and formulas. Version Update date (yyyy/mm/dd) Application period (days since launch) Referred OBC (from–to) and formula VNIR SWIR TIR 2000/02/01 to 2001/10/20 Second-order poly. 77.0 K to 78.2 K Linear (offset only) 2000/03/12 to 2000/10/07 Linear 3.00 2005/02/08 1999/12/18 (0) 3.01 2005/02/08 2000/10/18 (305) 3.02 2005/02/08 2001/10/21 (673) 2001/10/21 to 2005/07/30 Exponential 3.03 2006/07/08 2006/07/08 (2,394) 2004/12/11 to 2006/04/20 3.04 2007/01/29 2007/01/29 (2,599) 77.0 K to 81.1 K 3.05 2007/05/06 2007/05/06 (2,696) 3.06 2008/06/16 2007/06/16 77.0 K to 81.1 K Exponential (offset only) 3.07 2008/04/08 2007/09/22 (2,835) 3.08 2008/07/05 2008/07/06 (3,123) 3.09 2008/09/03 2008/07/18 (3,135) 3.10 2009/09/27 2009/09/27 (3,571) 3.11 2010/07/10 2010/07/10 (3,857) 2000/10/27 to 2005/07/30 Second-order poly. (C0) Exponential (C1) 77.0 K to 79.3 K Second-order poly. (offset only) 2002/09/15 to 2005/12/09 2004/02/18 to 2007/04/18 77.0 K to 86.8 K 2004/12/11 to 2008/05/18 2005/06/27 to 2008/05/18 Fixed 255 2005/06/27 to 2009/07/20 2003/04/16 to 2010/05/14 2008/03/13 to 2010/05/14 All dates follow the ASTER GDS format: yyyy/mm/dd. OBC ¼ onboard calibration; second-order poly. ¼ second-order polynomial correction; C0 ¼ offset correction coefficient (adjusted based on preobservation blackbody measurement); C1 ¼ gain coefficient derived by measuring the blackbody at 270, 300, 320, and 340 K. ASTER data 151 Table 6.4. ASTER: geometric performance parameters. Parameter a Version 3.0 Geometric DB (database) Intratelescopic registration VNIR SWIR TIR <0.1 pixel <0.1 pixel <0.1 pixel Intertelescopic registration SWIR/VNIR TIR/VNIR <0.2 pixel <0.2 pixel Stereo pair system (elevation) error Band 3B/3N (nadir) <10 m Pixel geolocation knowledge a <15 m <50 m Relative Absolute Not terrain-corrected. ring between different bands (indicating an electronic component of the MTF). In general most of the image intensity transition across the imaged edges takes place across 2 pixels (1 pixel from the actual edge); a small amount of the transition is further spread across 4 pixels (2 pixels from the edge) (Arai and Tonooka 2005). For example, band 10 thermal images of sharp edges show that roughly 90% of signal intensity (related to temperature) transition occurs within 1 pixel from the edge, but the rest of the intensity transition is spread more widely. The derivative of the MTF takes a Gaussian form. In addition, a member of the ASTER calibration team, Hugh Kieffer (unpublished report), has demonstrated TIR ghosting of thermal images of the Moon, and he also reveals stray arcs extending up to 110 pixels; the arcs are thought to be due to minor reflections within the sensor system. However, collectively these artifacts are of very low intensity, but they could help to explain blurred images of thermal boundaries shown below in Section 6.4.2.3. Although the MTF does little to obscure the positions of edges, absolute radiometry is sensitive to the MTF, which effectively defines the sizes of features where reliable thermal measurements or reflectances can be accurately assessed. 6.3.1.4 Geometric corrections ASTER’s geometric system correction primarily involves rotation and coordinate transformation of the detectors’ line-of-sight vectors to Earth’s coordinate system. This correction is accomplished as part of ASTER Level 1 processing at ASTER GDS with data derived from both the instrument and the Terra spacecraft platform. This geometric correc- tion also incorporates both preflight and postlaunch calibration processes. Preflight calibration is an offline process to generate line-of-sight vectors and pointing axes information that are evaluated toward the spacecraft’s navigation base reference, which reflects the instrument’s accuracy and stability. Following ASTER’s launch, these parameters were corrected via validation with ground control points (GCPs) and interband matching techniques. They include pointing correction, coordinate transformations that involve spacecraft, orbital, Earth’s inertial and Greenwich coordinates, and band-toband registration accuracies through SWIR parallax correction and intertelescope registration processes (Iwasaki and Fujisada 2005, Fujisada 2011). Given the ASTER instrument’s complex engineering and design features to accommodate the three different optical sensor systems, its geometric accuracy is quite good. The geometric performance parameters, based on Version 3.0 of the geometric correction database, are provided in Table 6.4. The ASTER Science Team in early 2005 discovered three discrepancies that potentially affect the accuracy of the latitude/longitude values in ASTER data. A brief description of these three discrepancies is provided below. ASTER data downloaded before the problems were discovered and the corrections implemented retained the errors, but all those data were reprocessed going back to the beginning of acquisitions. 6.3.1.5 Earth rotation angle error The first discrepancy is an incorrect calculation of the Earth’s rotation angle. This produced a geolocation error of up to 300 m near the poles for daytime scenes, and less than 100 m below 70 152 ASTER datasets and derived products for global glacier monitoring latitude. The longitude error for night-time scenes is largest at the equator, and decreases to 100 m at the poles. This error was completely modeled and fixed with a polynomial correction, and then applied to all subsequent Level 1 data. 6.3.1.6 Nutation-related longitudinal error The second discrepancy is omission of compensation for nutation in the Earth’s rotation. Nutation is defined as a slightly irregular oscillatory movement or wobble in the axis of the Earth’s rotation. The omission of compensation for nutation results in a longitude error that is dependent on the date of ASTER data acquisition. In general, the magnitude of error is less than 50 m before July 2003 and has since increased to about 200 m through the end of 2004. This discrepancy is corrected in all subsequent Level 1 data. 6.3.1.7 Earth ellipsoid-related terrain error The third discrepancy is due to the fact that ASTER processing uses the Earth ellipsoid (WGS 84) as the reference datum, and does not take into account actual surface elevation. Therefore, terrain error is included in latitude and longitude values caused by a difference between the WGS 84 ellipsoid and the actual Earth’s surface. The maximum displacement is about 400 m over the Tibetan Plateau, with an 8.5 off-nadir view angle. This error is correctible by using a digital elevation model to reduce or remove this discrepancy. 6.3.1.8 Loss of SWIR The SWIR sensor operationally stopped producing useful quality data in April 2008; since then only VNIR and TIR data have been acquired and processed. The SWIR sensor is equipped with a cryocooler designed to regulate a threshold operational temperature of 77 K. This temperature started rising gradually in September 2004, and was not a major issue until the temperature rose beyond 83 K in mid-2007. Initial impacts were felt in the longer wavelength bands, but this spread to include all SWIR bands by April 2008, after which SWIR became useless. The ASTER Instrument Team’s efforts to resolve this crisis included enhancing the cryocooler’s performance, and an attempt to maintain a stable detector temperature at 77 K. Though there were some positive results in the short term, the goal of stabilizing the detector’s operating temperature was not successful. A historical record of ASTER Level 1 SWIR data from March 2000 through April 2008 exists both in the U.S. and Japan. The loss of SWIR data impacts a number of dependent processes and activities. They include cloud cover assessment that depends on radiometrically calibrated band 4 (Level 1B) data to discriminate clouds from snow/ice and desert. Others include SWIR parallax correction/registration, and intertelescope registration for VNIR, SWIR, and TIR. ASTER GDS has reprocessed all Level 1 data affected by the deterioration of the SWIR sensor except for the band saturation issue. Further details regarding the SWIR sensor problem are available at http://www.science.aster.ersdac. jspacesystems.or.jp/t/en/about_aster/swir_en.pdf 6.4 ASTER DATA-PROCESSING STREAM 6.4.1 Standard Level 1A and Level 1B Since ASTER’s launch in 1999, the ASTER GDS in Japan has been responsible for Level 1 processing of ASTER data. This includes processing virtually all ASTER Level 0 data to Level 1A (L1A) data, as well as processing approximately one third of the L1A data to level 1B (L1B) data. Copies of all L1A and L1B data processed by the ASTER GDS are sent to the LP DAAC for archiving and distribution to users; and those who desire L1B data unavailable at the DAAC can order these data from the ASTER GDS in Japan. One primary goal of the LP DAAC is to process archived L1A data to L1B data, so that users would have routine access to L1B data (and higher level products) from the entire ASTER data archive. In late 2005, an agreement was reached to change the approach to ASTER L1 processing. Under the new approach, the ASTER GDS continues to process ASTER Level 0 data to L1A data, and send copies of all L1A to the LP DAAC. The LP DAAC and the ASTER GDS each assume responsibility, using software developed by the ASTER GDS, for processing on-demand L1B data they distribute to their users and/or use to produce higher level products ordered by their users. The ASTER GDS implemented the Level 1 on-demand processing system on April 19, 2006, and the LP DAAC system became operational on May 24, 2006. Currently, 400 to 500 ASTER Level 1A products are produced by the ASTER GDS in Japan on a daily basis, and transmitted to the LP DAAC via ASTER data-processing stream 153 Figure 6.1. ASTER data flow dynamics at the LP DAAC. Source: B. Ramachandran et al. (Eds.), Land Remote Sensing and Global Environmental Change (& Springer, 2011). the Asia Pacific Advanced Network. The LP DAAC, which maintains the same Level 1 algorithms as the ASTER GDS, generates the desired Level 1B and higher level products for its NASA affiliates as well as U.S. federal partners, while the ASTER GDS serves all other customers. Fig. 6.1 depicts the dynamics of data flow from satellite data acquisition through product generation (via production and expedited data streams), which involves several entities. The ASTER mission is unique in that it does not have a routine reprocessing campaign for Level 1 data. Since its launch in December 1999, ASTER GDS has reprocessed all acquired data one time. This took place when the public version of data was elevated from Version 2 to Version 3. The ASTER GDS implemented this version change in May 2001 to accommodate substantial improvements in the ASTER Level 1 algorithm. Since then the quality of Level 1B and higher level data products has been constrained by radiometric and geometric calibration parameters. 6.4.2 ASTER standard higher level products A hallmark of the NASA Earth Observing System (EOS) mission is to generate not only L1 data prod- ucts but also a suite of higher level products derived from any given sensor to characterize various geophysical parameters. This facilitates the needs of end users in a number of ways: It removes the burden of preprocessing that would fall on them. It ensures the very best algorithms are used in conformance with the best community practices, and it also confirms that methodologically consistent products are produced. Overall, it alleviates the need for end users to expend a lot of time and resources in correctly implementing complex processing steps, and, instead, allows them to readily use these products in their research, applications, analyses, and interpretations. A similar suite of standard ASTER higher level products is produced both in the U.S. and Japan (Watanabe et al. 2011). All descriptions in this chapter pertain to the U.S. production system and archives at the LP DAAC. At the start of the ASTER mission, roughly half-adozen standard higher level products were produced on demand (Watanabe et al. 2011). Three Level 2 products—including a decorrelation stretch (for all three sensors), brightness temperature at sensor, and polar surface and cloud classification product—were retired in May 2010 (JPL 2001). A couple of additional variant products (SWIR crosstalk-corrected products and orthorectified products) were introduced in 2006 and 2007, respec- 154 ASTER datasets and derived products for global glacier monitoring tively. Several higher level products described below are important and highly subscribed products that serve the glaciology community in numerous ways. 6.4.2.1 Reflectance Suite The ASTER L2 Surface Reflectance product is a higher level product that contains atmospherically corrected VNIR and SWIR data. This product is generated using the three VNIR bands (between 0.52 mm and 0.86 mm) and six SWIR bands (between 1.60 mm and 2.43 mm) derived from an ASTER L1B dataset. The atmospheric correction process derives a relationship between the surface radiance/reflectance and top-of-the-atmosphere radiance from information on the scattering and absorption characteristics of the atmosphere. Once this relationship is established, it is used to convert original ASTER VNIR and SWIR radiance values to atmospherically corrected surface radiance and reflectance values. The atmospheric correction algorithm is based on a lookup table (LUT) approach, which uses results from a Gauss–Seidel iteration of a radiative transfer code (RTC). This methodology derives from the University of Arizona Remote Sensing Group’s reflectance-based vicarious calibration approach (ATBD 1999). The algorithm is based on the relationship between the angular distribution of radiance, atmospheric scattering and absorption, and surface properties. The RTC used to generate the LUT for atmospheric correction is based on the following parameters: solar zenith angle, satellite view angle, relative azimuth angle between the satellite and Sun, molecular scattering optical depth, aerosol scattering optical depth, aerosol scatter albedo, aerosol size distribution parameter, and surface reflectance. A digital elevation model provides slope and elevation information required to accurately model surface reflectance. This suite also includes a SWIR crosstalkcorrected reflectance product. A description of the SWIR crosstalk problem follows. The ASTER SWIR sensor is affected by a crosstalk signal-scattering problem, a phenomenon discovered after ASTER’s launch. The source of the crosstalk problem is the ASTER band 4 detector, whose incident light is reflected by the detector’s aluminum-coated parts (especially from the area between the detector plane and bandpass filter), and is then projected onto the other detectors (Arai et al. 2011). The band-to-band parallax effect and the distance between the CCD array pairs further worsen the problem. Bands 9 and 5 are most affected because of their closeness to the Band 4 detectors. Evidence of crosstalk, along with photon spread and ghosting effects, is visible in images with strong contrast, especially coastlines and islands. The Japanese ASTER Science Team developed the original crosstalk correction algorithm that is used to correct an ASTER L1B dataset. The original model is based on the fundamental understanding that incident radiation to band 4, which is reflected or leaked to the other bands will follow a certain pattern of line shifts in the along-track direction. The kernel function used in the convolution (in the original algorithm) is not considered symmetrical in the cross-track direction (Tonooka and Iwasaki 2003, Iwasaki and Tonooka 2005). Using the Japanese crosstalk correction algorithm, the ASTER project at JPL has implemented a crosstalk correction process that is applied to ASTER L1B data before deriving the reflectance product. This correction is implemented for processing at the LP DAAC and the ASTER GDS facility. 6.4.2.2 Temperature/Emissivity Suite The ASTER L2 Surface Kinetic Temperature product (AST08) is generated using the five TIR bands acquired either during daytime or night-time between 8 and 12 mm spectral range. It contains surface temperatures at 90 m spatial resolution for land areas only. Derived using the same algorithm as that of Surface Emissivity, Surface Kinetic Temperature is determined by applying Planck’s Law using the emissivity values from the temperature emissivity separation (TES) algorithm (Gillespie et al. 1998), which uses atmospherically corrected ASTER Surface Radiance (TIR) data. In response to changes in certain input variables, some modifications were implemented in the TES algorithm. What follows is a brief description of the original algorithm, and subsequent changes as well. The TES algorithm first estimates emissivities in the TIR channels using the Normalized Emissivity Method (NEM) (Gillespie et al. 1998). These estimates are used along with Kirchhoff ’s Law to account for land-leaving TIR radiance that is due to sky irradiance. That figure is subtracted from TIR radiance iteratively (pixel by pixel) to estimate emitted radiance from which temperature is calculated using the NEM module. Estimates of surface emissivity were derived using surrogates such as land cover type or vegetation index. The TES algorithm is used to derive both " (emissivity) and T (surface temperature). Its main goals include ASTER data-processing stream 155 recovering accurate and precise emissivities for mineral substrates, and estimating accurate and precise surface temperatures especially over vegetation, water, and snow. A linear regression approach replaced the original nonlinear one when it became clear that precision was being sacrificed in favor of accuracy.1 The TES algorithm is executed in the ASTER processing chain after ASTER L2 (land-leaving) Surface Radiance (TIR) data are generated. Land-leaving radiance and downwelling irradiance vectors for each pixel are taken into account. The emissivity spectrum is normalized using the average emissivity of each pixel. The minimum–maximum difference (MMD) of the normalized spectrum is calculated and estimates of the minimum emissivity derived through regression analysis (Matsunaga, 1994) are made. These estimates are used to scale normalized emissivity and compensate for reflected skylight using the derived refinement of emissivity (Gillespie et al., 1998). Over time, certain algorithm modifications have been made in response to several factors that include the ASTER TIR sensor’s change in sensitivity response, the frequency of updates to its calibration coefficients, and imperfections in atmospheric compensation, etc. (Gustafson et al., 2006). The modifications include turning off iterative compensation of spectral irradiance, onetime correction, and linear scaling of the normalized emissivity spectrum. A key higher level TIR-derived data product is surface kinetic temperature (AST08), which is derived from all five ASTER TIR bands. ASTER-derived kinetic temperature image data are used in various chapters but are not validated elsewhere in this book, so here we dedicate some attention to this dataset’s performance relative to glacier studies. Fig. 6.2 (see also Online Supplement 6.1) includes a kinetic temperature image of part of the Chugach and Saint Elias Mountains, the Bagley Icefield, Bering Glacier, and Iceberg Lake area, Alaska. (See Chapter 12 of this book by Wolfe et al. for a detailed glaciological case study on Iceberg Lake and environs and Chapter 13 by Kargel et al. for glacier analysis results from the Chugach Mountains, including Bering Glacier.) The image shows that a huge fraction of the glacier area—both snowfields and exposed glacier ice (including areas of slightly dirty ice)—have fairly homogeneous temperatures (Fig. 6.2B). The image date was August 8, 2003 (the fourth author visited the area twice at about the same time of year in 2008 and 2009), when snow and ice across almost the whole region was melting, and supraglacial ponds and streams or wet snow covered almost the entire surface of the glaciers (which were not debris covered), including the small accumulation areas. A reasonable assumption emerging from this is that the homogeneous temperature field across glacier and snowfield surfaces in this image are almost everywhere precisely at the melting point, thus 273.15 K. Three sample areas were selected for extraction of temperature histograms (Fig. 6.2G). The areas include a large, melting snowfield; a large expanse of melting glacier ice; and the small, icebergcluttered remnant of Iceberg Lake, which at that time would have been a pond filled with melting icebergs, bergy bits, brash ice, and ice-cold, turbid water. Each of these areas shows histograms shifted well to the warm side of the melting point of water ice. For areas 1 and 2, the shift is identified as indicating a temperature bias of about þ1.2 K; the spread of values for areas 1 and 2 is consistent with the formally stated 1 K uncertainty. We have noted a comparable bias in many other scenes; this appears to be fairly general for the ASTER TIR kinetic temperature product in snow, ice, and water areas, which might be related to emissivity assumptions for these materials. In the case of area 3, the more substantial positive shift may be due to unresolved debris patches, but considering our discussion in Section 6.4.2.3, we think it could be due to bleeding of high-temperature signals onto the cold pixels of this lake; in other words, the lake is not fully resolved, despite the formal 90 m resolution of TIR and the published modulation transfer function (Arai and Tonooka 2005). Thus, anyone doing thermal work with ASTER data should keep a watchful eye on such bias and resolution issues. 1 Precision pertains to the level of measurement and exactness of description within a GIS database (e.g., the number of decimal positions irrespective of whether the number is accurate). Accuracy is the degree to which information on a map or GIS database matches true or accepted values, irrespective of the number of decimal positions. 6.4.2.3 Detection versus full resolution of features in VNIR, SWIR, and TIR Users also should remain aware of another feature of ASTER TIR data, which is its spatial resolution, formally 90 m/pixel (versus 15 m/pixel for VNIR and 30 m/pixel for SWIR). However, in practice it is 156 ASTER datasets and derived products for global glacier monitoring Figure 6.2. Performance of ASTER TIR as shown in the kinetic temperature standard product for an image acquired on August 8, 2003, over the Chugach Mountains, Alaska. Figs. 6.2E and 6.2F show some manually delineated major, sharp material boundaries; the temperature image shows that the boundaries are diffuse over about 5 TIR pixels (2 or 3 pixels on either side of the boundaries). Fig. 6.2H shows histogram distributions of measured temperatures for three areas (Fig. 6.2G) that nominally should be almost pure snow or ice at the melting point. The image within the three outlined sample areas has been stretched so that the full DN range is shown in order to reveal thermal heterogeneity within; the fine structure is mainly noise. The place name ‘‘Kieffer Glacier’’ in panel 6.2C is informal (see Chapter 12 of this book by Wolfe et al.). See Online Supplement 6.1 for full resolution. DN ¼ digital number. ASTER data-processing stream 157 Figure 6.3. Schematic illustration of ASTER image detection and spatial resolvability of rectangular and circular features using VNIR and SWIR (approximated in panel A) and TIR (approximated in panel B). The diagrams show some pixel lines across schematic anomalies that are, from left to right, either long and linear but subpixel in width, subpixel in both length and width, fully resolved spatially (so that at least one pixel in each crossing transect senses photons only from the anomaly material), or circular and fully resolved. The top and bottom panels (A and B, respectively) show cases for either sharp, square wave responses along material discontinuities (panel A), or where thermally hot pixels bleed the signal into adjoining pixels as far as 2 pixels away (panel B). In each case, ‘‘w’’ is the pixel size (15 m for VNIR, 30 m for SWIR, 90 m for TIR). See text for further detailed explanation. quite different than that. Sharply contrasting cold and warm objects are not resolved as clearly as the formal pixel resolution would suggest. Warm targets tend to bleed onto adjacent cold targets. This has been documented by the ASTER Calibration Team (Arai and Tonooka 2005), but what we have found could suggest a slightly broader blurring of sharp boundaries. Fig. 6.2F portrays this well, particularly along the sharply delineated shore of Iceberg Lake, which appears diffuse over about 5 TIR pixels, rather than the 2 pixels if the response of TIR for a sharp boundary was more nearly a square wave across the boundary. This brings us to a discussion of detection versus full resolution of features. Consider a hot target surrounded by a uniform cold body. We refer to Fig. 6.3, which schematically illustrates some resolution issues encountered in Fig. 6.2. We start with optical sensor resolution, which is more widely known and can illustrate some key points applicable to thermal data as well. With VNIR and SWIR (Fig. 6.3A) a lineament that is long but much less than a pixel wide is not resolved in width (thus, it consists of ‘‘mixels’’ of two materials in each pixel falling on top of the lineament), but it may be detectable and mappable. A subpixel patch (smaller than a pixel in width and length) may appear as a single anomalous pixel, where the significance depends on background fluctuations and whether the patch contributes enough to distinguish the mixel from background pixel values; however, a solitary subpixel anomaly would not likely engender much interest; for one thing, it could be a single bad pixel. A fully spatially resolved anomalous lineament (e.g., a medial moraine) must have a width of at least 2 pixels (30 m for VNIR, 60 m for SWIR) in order to be assured that at least one pixel along any transect encompasses the anomaly material; however, as Fig. 6.3A shows, a 2-pixel-wide lineament will generally be resolved with an apparent width of 3 pixels, due to the presence of mixels. A circular anomaly patch (e.g., an exposure of ice or a pond in an otherwise debris-covered patch of a glacier) must have a minimum diameter of 2 3=2 pixels (42 m for VNIR, 85 m for SWIR) in order to be fully spatially 158 ASTER datasets and derived products for global glacier monitoring resolved (to have at least one pixel that is not a mixel). ASTER TIR data have an added complication, and this is our prime reason for dealing with this issue here, since it is not discussed elsewhere. A thermal anomaly can be as small as 1 TIR pixel (even smaller if it is hot enough) and have its presence detectable; that is, with a sufficiently cooler and uniform background, a subpixel patch of thermally anomalous material might be detectable, but not resolvable; the hot object may appear noiselike, and could be confused with a bad pixel value. For TIR, the situation is complicated because of the bleeding of hot pixel energies onto what should be cold pixels if we had a perfect imaging system. We will assume that this type of thermal blurring occurs over about 2 pixels away from a sharp boundary. For a linear cold anomaly (e.g., a linear patch of debris-free ice adjoined by Sun-warmed debris-covered ice), full resolution and thus reliable thermal measurements of the anomaly would require it to have a width of 6 TIR pixels (i.e., 540 m) in order to contain just 1 pixel representing the anomaly temperature without contamination from adjacent warm pixels (Fig. 6.3B). A homogeneous, circular, cold feature (e.g., an ice-cold lake surrounded by debris-covered ice) would require a diameter of (2 3=2 þ 3) pixels (525 m) to assure that at least one TIR pixel measures the actual temperature near the center of that cold anomaly. However, in terms of how ASTER TIR sees (detects) such an anomaly, the blurring would cause the minimally resolved circular feature (525 m in diameter) to appear 11 VNIR pixels wide (990 m). Fig. 6.3B suggests that in surveying ASTER TIR and derived data, any thermal anomaly showing in the image must have an apparent size of a kilometer or larger in order to give any realistic hope of giving a direct accurate measurement of the actual anomaly temperature; the corresponding actual critical size of an anomaly (as measured on the ground, for instance) would be about half a kilometer. Model-based approaches may provide adequate estimates of actual temperatures for slightly unresolved features. The case in Fig. 6.2 shows Iceberg Lake near the critical size for full spatial resolvability. However, it is questionable, given the warm measured temperatures of Iceberg Lake (high 270s K; Fig. 6.2H), whether even one TIR pixel in Iceberg Lake is completely uncontaminated by emissions from adjacent warmer material. The larger patches of melting snow and ice (areas 1 and 2 in Figs. 6.2G and 6.2H) are certainly com- pletely resolved; their temperature histograms indicate a positive temperature bias of 1.2 K, a value similar to that in several other TIR temperature scenes of glaciers that we have examined. Bias correction could be applied to Fig. 6.2B (but has not been) by subtracting 1.2 K. The spread of values in the histograms for areas 1 and 2 (standard deviation around 0.5 K; Fig. 6.2H) is consistent with the ASTER project’s stated formal error of 1 K for this temperature region (Table 6.1). Of course this is just one image, but the validation appears reasonable and is typical. Users can rely on ASTER kinetic temperature products but must be aware of (and preferably correct) bias. 6.4.2.4 Elevation products One of the unique capabilities of the ASTER VNIR sensor is its aft-viewing telescope that enables it to generate stereoscopic data (along with the nadirviewing telescope) to create digital elevation models. From April 2001 to May 2006, LP DAAC produced both ASTER relative (without GCPs) and absolute (with user-supplied GCPs) DEMs using ASTER L1A input data. The DEM production system involved a human operator, and was designed to generate one or two DEMs per day. Hence, following an extensive assessment of the accuracy of ASTER relative DEMs produced by a variety of ASTER DEM generation software, the Japanese SilcAst software with a capacity to produce 50 or more ASTER relative DEMs per day in batch mode operation, was implemented at LP DAAC. The accuracy of the new DEMs meets or exceeds the specifications set for ASTER relative DEMs by the Algorithm Theoretical Basis Document (ATBD). Toutin (2011) provides an extensive history and description of standard ASTER DEM production systems as they evolved in both the U.S. and Japan. NASA and Japan’s Ministry of Economy, Trade and Industry (METI) jointly developed the ASTER Global Digital Elevation Model (GDEM), Version 1 (GDEM-1), which was released in June 2009 and provides elevation data for 99% of the Earth’s land areas. GDEM-1 was produced in Japan by the Sensor Information Laboratory Corporation (SILC), a Japanese company that promotes ASTER data use in science and industry through the DEM, orthorectification, and L1B software it develops exclusively for ASTER data. SILC produced GDEM-1 by automated processing of 1.5 million ASTER Level 1A scenes through stereo ASTER data for GLIMS: STARS, DARs, gain settings, and image seasons correlation to generate 1,264,118 individual scenebased ASTER DEMs. Further cloud masking, stacking cloud-screened DEMs, eliminating outliers/bad values, averaging selected data to create final pixel values, and correcting residual anomalies yielded data that were partitioned into 1 1 tiles. GDEM-1 covers land surfaces between 83 N and 83 S in 22,600 1 1 tiles. The vertical and horizontal accuracies estimated at preproduction were 20 and 30 m, respectively (at 95% confidence level). GDEM-1 validation studies indicate that accuracies vary and are not met uniformly, and also acknowledge that there exists an average global bias of 5 m. Chrysoulakis et al. (2011) found that preproduction accuracies are not met in their analysis of GDEM-1 data over Greece. Both NASA and METI acknowledged that though this version of GDEM is deemed experimental its potential benefits outweigh its flaws. GDEM Version 2 (GDEM-2) was released in October 2011. GDEM-2 incorporates an additional 260,000 newly acquired scenes (not available during the GDEM-1 time frame), many of which were specifically targeted to help fill holes in ASTER’s global coverage due to persistent cloud cover. Major algorithm updates to GDEM-2 include the following (Tachikawa et al. 2011): 1. A change in the window size for normalized correlation matching to measure elevation from 9 9 pixels (in GDEM-1) to 5 5 pixels to produce finer horizontal resolutions. 2. Adjustments to the elevation offset (established at around 5 m in GDEM-1). 3. Enhanced water body detection to help identify those as small as 1 km 2 . The GDEM-2 validation study performed by the U.S. and Japanese partners revealed that its absolute vertical accuracy was within 0.20 m on average when compared against 18,000 geodetic control points over the conterminous U.S. at an accuracy of 17 m at the 95% confidence level (Gesch et al. 2012). Both U.S. and Japanese investigations found improvements in the horizontal resolution between 71 and 82 m; however, this improvement was realized at the cost of some additional noise. The prevalence of artifacts and voids in GDEM-1 were largely reduced in GDEM-2 with complete elimination in some areas. Given some major improvements, the GDEM Validation Team recommended GDEM-2’s release, while acknowl- 159 edging the existence of some remaining artifacts (Gesch et al. 2012). Chapter 5 of this book by Quincey et al. includes validation test results relating to digital topography produced from ASTER stereo images, including single scenes and GDEMs; several regional chapters review or present data analysis that make use of bias determination and correction. The regional chapters include many applications of elevation data; the most sensitive of these involve differential elevations, whether elevation change, or highfrequency slope or roughness assessments, or shifting equilibrium line altitudes. The GLIMS community has produced many validation tests of ASTER elevation products and analysis of glacierized terrain after application of validation tests and corrections. For example, the scene average bias in multitemporal elevation changes was determined for a pair of ASTER DEMs in the Hoodoo Mountain area, British Columbia (see Chapter 15 of this book by Kargel et al.); the bias was small enough that a first-order correction made a small but sufficient correction related to derivation of glacier mass balance. Other works have shown not just scene average bias, but slope and aspect-dependent biases (Nuth and Kääb 2011, Gardelle et al. 2012a, b), which in some cases could be significant sources of error if not corrected. 6.5 ASTER DATA FOR GLIMS: STARS, DARs, GAIN SETTINGS, AND IMAGE SEASONS Glacier monitoring (GLIMS) was accepted as an official ASTER Science Team investigation from the earliest days of ASTER. Although GLIMS is not tied strictly to ASTER, it has been a cornerstone of the project. GLIMS became operational in 2000 shortly after ASTER’s launch. Four types of observations are conducted by ASTER that are of use to GLIMS (Yamaguchi et al. 1998, and modified subsequently by the ASTER Science Team and Mission Operations Team). They include (1) ASTER Science Team Acquisition Requests (STARs) explicitly for GLIMS, (2) standard Data Acquisition Requests (DARs), (3) emergency DARs, and (4) all other imaging by other teams and for other purposes, such as volcano STARs and global mapping STARs. The small field of view of the ASTER instrument as well as its pointing capability mean that the instrument must be scheduled to acquire images 160 ASTER datasets and derived products for global glacier monitoring over specific targets in response to users’ needs. For ASTER to acquire imagery over a specific glacierized region, it needs to be scheduled to turn on at the correct time, with correct instrument settings for highly reflective material (snow), and possibly commanded to point off-nadir. For the GLIMS STARs, we needed to create a set of approximately 1,760 data acquisition requests to cover all known glaciers in the world. Each such request needs to contain a number of types of information in order to adequately schedule the instrument: geographic location, in the form of a longitude/latitude polygonal outline of the area (consisting of 20 or fewer vertices); instrument gain settings (similar to exposure in photography); optimal time of year for imaging glaciers in that area; and information about the requestor. We wrote dedicated software to calculate optimal time of year and gains based on solar geometry. These were then formatted and sent to the ground systems personnel in Japan for input into the master scheduling system. The process of creating these original data requests is documented in Raup et al. 2000. While this first set of STARs led to good image acquisition over many of the world’s glacierized regions, some regions were not so lucky, due to a variety of reasons. After the second year in the mission, we were given the opportunity to change the STARs to compensate for uneven past performance. Updates have been made repeatedly to try to compensate for deficiencies in acquisitions, such as excessive snow cover, excessive frequency of cloudy images, or simply lack of image acquisitions due to constraints imposed by ASTER Mission Operations (MO). MO has, for instance, for engineering reasons required a drastic cutback in pointing, which has eliminated most imaging of high-latitude parts of Antarctica and has reduced other imaging opportunities. Some large regions of the world, such as Alaska, have been considerably underserved due to constraints imposed on MO by competing imaging needs in places like Iraq and Afghanistan and for other reasons. Major recent modifications of the GLIMS STARs were developed by GLIMS over several years of successive installments to help reduce the amount of saturation common in ASTER VNIR images over equator-facing, snow-covered slopes in some regions, as well as to shift the imaging seasons slightly to reduce snow cover. While the GLIMS project has succeeded in capturing tens of thousands of high-quality glacier images, coverage remains uneven. Other science goals of the ASTER project, such as global mapping, have acquired tens of thousands of other useful glacier images, though usually not with gain settings that are well suited for snow and ice targets; hence, heavy saturation reduces the usefulness of those scenes. However, what is lost in global mapping images over snow and ice areas is gained in added detail over heavily debris-covered areas, glacier lakes, and in shadowed areas. Hence, the full suite of ASTER imagery provides for complementary coverage of different glaciers and different parts of glaciers. Furthermore, global map scenes are needed to help fill in the digital topography needed for GDEM production. The gaps in coverage (especially multitemporal coverage) have been used to justify some special increased local coverage, submitted either individually or by the project PI, in the form of standard data acquisition requests. This category also includes images obtained in support of field campaigns. Emergency acquisitions have also been requested and fulfilled for prompt follow-up imaging after natural disasters, such as outburst floods, ice avalanches, and rockfall damming of rivers (Kargel et al. 2010), as well as following other special dynamical events, such as the breakup of the Mertz Glacier tongue in Antarctica. As with the STARs, these special requests have proven uneven in their success, due mainly to the challenge of cloudy conditions that prevail in many glacierized areas. In sum, though overall coverage still remains uneven, ASTER has been revolutionary for glacier remote sensing due both to the instrument’s exquisite capabilities and to the liberal data dissemination policies. 6.6 ACKNOWLEDGMENTS We would like to thank Masami Hato (ERSDAC, Tokyo), Ken Duda (LP DAAC, Sioux Falls), and Bjorn Eng (JPL, Pasadena) for their help in tracking down certain critical details of the ASTER mission. We also thank Alan Gillespie (University of Washington, Seattle) for his updates and clarifications regarding the TES algorithm. ASTER data courtesy of NASA/GSFC/METI/Japan Space Systems, the U.S./Japan ASTER Science Team, and the GLIMS project. References 161 6.7 REFERENCES Arai, K., and Tonooka, H. (2005) Radiometric performance evaluation of ASTER VNIR, SWIR, and TIR. IEEE Transactions on Geoscience and Remote Sensing, 43(12), 2725–2732. Arai, K., Thome, K., Iwasaki, A., and Biggar, S. (2011) ASTER VNIR and SWIR Radiometric Calibration and Atmospheric Correction. In: B. Ramachandran, C. Justice, and M. Abrams (Eds.), Land Remote Sensing and Global Environmental Change, NASA’s Earth Observing System and the Science of ASTER and MODIS. Springer-Verlag, New York. ATBD (1999) Algorithm Theoretical Basis Document for ASTER Level 2B1 Surface Radiance and Level 2B5 Surface Reflectance. Principal Investigator: Kurt Thome. Available at http://eospso.gsfc.nasa.gov/eos_ homepage/for_scientists/atbd/docs/ASTER/atbd-ast-0709.pdf Bishop, M.P., Olsenholler, J.A., Shroder, J.F., Barry, R.G., Raup, B.H., Bush, A.B.G., Copland, L., Dwyer, J.L., Fountain, A.G., Haeberli, W. et al. (2004) Global Land Ice Measurements from Space (GLIMS): Remote sensing and GIS investigations of the Earth’s cryosphere. Geocarto International, 19(2), 57–84. Bolch, T., Kulkarni, A., Kääb, A., Huggel, C., Paul, F., Cogley, J.G., Frey, H., Kargel, J.S., Fujita, K., Scheel, M. et al. (2012) The state and fate of Himalayan glaciers. Science, 336, 310–314, and supplemental online material. Chrysoulakis N., Abrams, M., Kamarianakis, Y., and Stanislawski, M. (2011) Validation of ASTER GDEM for the area of Greece. Photogrammetric Engineering & Remote Sensing, 77(2), 157–165. Daucsavage, J., Kaminski, M., Ramachandran, B., Jenkerson, C., Sprenger, K., Faust, R., and Rockvam, T. (2011) ASTER and MODIS land data management at the land processes, and National Snow and Ice Data Centers. In: B. Ramachandran, C. Justice, and M. Abrams (Eds.), Land Remote Sensing and Global Environmental Change, NASA’s Earth Observing System and the Science of ASTER and MODIS. SpringerVerlag, New York. Fujisada, H. (2011) Terra ASTER instrument design and geometry. In: B. Ramachandran, C. Justice, and M. Abrams (Eds.), Land Remote Sensing and Global Environmental Change, NASA’s Earth Observing System and the Science of ASTER and MODIS. SpringerVerlag, New York. Gardelle, J., Berthier, E., and Arnaud, Y. (2012a) Slight mass gain of Karakoram glaciers in the early twentyfirst century. Nature Geoscience, 5, 322–325. Gardelle, J., Berthier, E., and Arnaud, Y. (2012b) Impact of resolution and radar penetration on glacier elevation changes computed from DEM differencing. Journal of Glaciology, 58(208), 419–422. Gesch, D.B., Oimoen, M.J., Zhang, Z., Meyer, D.J., and Danielson, J.J. (2012) Validation of the ASTER Global Digital Elevation Model Version 2 over the conterminous United States. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIX(B4). Gillespie, A.R., Rokugawa, S., Matsunaga T., Cothern, S., Hook, S.J., and Kahle, A.B. (1998) A temperature and emissivity separation algorithm for Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER) images. IEEE Transactions on Geoscience and Remote Sensing, 36, 1113–1126. Gustafson, W.T., Gillespie, A.R., and Yamada, G. (2006) Revisions to the ASTER temperature/emissivity separation algorithm. In: J.A. Sobrino (Ed.), Second Recent Advances in Quantitative Remote Sensing. Publicacions de la Universitat de València, Spain, pp. 770–775. Iwasaki, A., and Fujisada, H. (2005) ASTER geometric performance. IEEE Transactions on Geoscience and Remote Sensing, 43, 2700–2706. Iwasaki, A., and Tonooka, H. (2005) Validation of a crosstalk correction algorithm for ASTER/SWIR. IEEE Transactions on Geoscience and Remote Sensing, 43, 2747–2751. JPL (2001) ASTER Higher-Level Product User Guide, Version 2.0 (JPL D-20062). JPL-CalTech, Pasadena, CA. Kääb, A., Huggel, C., Paul, F., Wessels, R., Raup, B., Kieffer, H., and Kargel, J. (2003a) Glacier Monitoring from ASTER imagery: Accuracy and applications. Paper presented at Proceedings of EARSeL LISSIG Workshop: Observing Our Cryosphere from Space, Bern, March 11–13, 2002 (EARSeL eProceedings No. 2, pp. 43–53). Kääb A., Wessels, R., Haeberli, W., Huggel, C., Kargel, J.S., and Khalsa, S.J.S (2003b) Rapid ASTER imaging facilitates timely assessment of glacier hazards and disasters. EOS Trans. Am. Geophys. Union, 84(13), 117–121. Kargel, J.S., Abrams, M.J., Bishop, M.P., Bush, A., Hamilton, G., Jiskoot, H., Kääb, A., Kieffer, H.H., Lee, E.M., Paul, F. et al. (2005). Multispectral imaging contributions to global land ice measurements from space. Remote Sensing of Environment, 99, 187–219. Kargel, J.S., Leonard, G., Crippen, R.E., Delaney, K.B., Evans, S.G., and Schneider, J. (2010) Satellite monitoring of Pakistan’s rockslide-dammed Lake Gojal. EOS Trans. Am. Geophys. Union, 91(43), doi: 10.1029/ 2010EO430002. Kargel, J., Furfaro, R., Kaser, G., Leonard, G., Fink, W., Huggel, C., Kääb, A., Raup, B., Reynolds, J., Wolfe, D. et al. (2011). ASTER imaging and analysis of glacier hazards. In: B. Ramachandran, C.O. Justice, and M.J. Abrams (Eds.), Land Remote Sensing and Global Environmental Change: NASA’s Earth Observing System and the Science of Terra and Aqua. Springer-Verlag, New York, pp. 325–373. 162 ASTER datasets and derived products for global glacier monitoring Kargel, J.S., Ahlstrøm, A.P., Alley, R.B., Bamber, J.L., Benham, T.J., Box, J.E., Chen, C., Christoffersen, P., Citterio, M., Cogley, J.G. et al. (2012a) (Brief Communication) Greenland’s shrinking ice cover: ‘‘Fast times’’ but not that fast. The Cryosphere, 6, 533–537. Available at http://www.the-cryosphere.net/6/533/2012/ doi: 10.5194/tc-6-533-2012. Kargel, J.S., Alho, P., Buytaert, W., Celleri, R., Cogley, J.G., Dussaillant, A., Zambrano, G., Haeberli, W. Harrison, S., Leonard, G. et al. (2012b) Glaciers in Patagonia: Controversy and Prospects. EOS Trans. Am. Geophys. Union, 93, 212. Kieffer, H., Kargel, J., Barry, R., Bindschadler, R., Bishop, M., MacKinnon, D., Ohmura, A., Raup, B., Antoninetti, M., Bamber, J. et al. (2000) New eyes in the sky measure glaciers and ice sheets. EOS Trans. Am. Geophys. Union, 81(24), June 13. Matsunaga, T. (1994) A temperature-emissivity separation method using an empirical relationship between the mean, the maximum, and the minimum of the thermal infrared emissivity spectrum. Journal of Remote Sensing Society of Japan, 14(2), 230–241 [in Japanese with English abstract]. Nuth, C. and Kääb, A. (2011) Co-registration and bias corrections of satellite elevation data sets for quantifying glacier thickness change. The Cryosphere, 5, 271– 290. Plafcan, D. (2011) Technoscientific diplomacy: The practice of international politics in the ASTER collaboration. In: B. Ramachandran, C. Justice, and M. Abrams (Eds.), Land Remote Sensing and Global Environmental Change, NASA’s Earth Observing System and the Science of ASTER and MODIS. Springer-Verlag, New York. Ramachandran, B., Justice, C., and Abrams, M. (2011) Land Remote Sensing and Global Environmental Change, NASA’s Earth Observing System and the Science of ASTER and MODIS. SpringerVerlag, New York. Raup, B.H., and J.S. Kargel (2012) Global land ice measurements from space (GLIMS). In: R.S. Williams and J.G. Ferrigno (Eds.), Satellite Image Atlas of the Glaciers of the World, Volume A—State of the Earth’s Cryosphere at the Beginning of the 21st Century: Glaciers, Snow Cover, Floating Ice, and Permafrost and Periglacial Environments (in press). Raup, B.H., Kieffer, H.H., Hare, T.M., and Kargel, J.S. (2000) Generation of data acquisition requests for the ASTER satellite instrument for monitoring a globally distributed target: Glaciers. IEEE Transactions on Geoscience and Remote Sensing, 38(2), 1105–1112. Raup, R., Kääb, A., Kargel, J.S., Bishop, M.P., Hamilton, G., Lee, E., Paul, F., Rau, F., Soltesz, D., Khalsa, S.J.S. et al. (2007) Remote sensing and GIS technology in the Global Land Ice Measurements from Space (GLIMS) project. Computers and Geoscience, doi: 10.1016/j.cageo.2006.05.015. Sakuma, F., Kikuchi, M., Ohgi, N., Inada, H., Akagi, S., and Ono, H. (2011) Eleven years of ASTER onboard calibration. Proc. SPIE 8176, Sensors, Systems, and Next-Generation Satellites XV, 81760F (October 3, 2011), doi: 10.1117/12.897744. Tachikawa, T., Hato, M., Kaku, M., and Iwasaki, A. (2011) Characteristics of ASTER GDEM Version 2. IEEE Int. Geoscience and Remote Sensing Symp. (IGARSS) Proceedings, pp. 3657–3660. Tonooka, H. (2011) ASTER TIR radiometric calibration and atmospheric correction. In: B. Ramachandran, C. Justice, and M. Abrams (Eds.), Land Remote Sensing and Global Environmental Change, NASA’s Earth Observing System and the Science of ASTER and MODIS. Springer-Verlag, New York. Tonooka, H., and Iwasaki, A. (2003) Improvement of ASTER/SWIR crosstalk correction. Proc. SPIE 5234, pp. 168–179. Toutin, T. (2011). ASTER stereoscopic data and digital elevation models. In: B. Ramachandran, C. Justice, and M. Abrams (Eds.), Land Remote Sensing and Global Environmental Change, NASA’s Earth Observing System and the Science of ASTER and MODIS. Springer-Verlag, New York. Watanabe, H., Bailey, G.B., Duda, K., Kannari, Y., Miura, A., and Ramachandran, B. (2011) The ASTER data system: An overview of the data products in Japan and in the United States. In: B. Ramachandran, C. Justice, and M. Abrams (Eds.), Land Remote Sensing and Global Environmental Change, NASA’s Earth Observing System and the Science of ASTER and MODIS. Springer-Verlag, New York. Yamaguchi, Y., Kahle, A.B., Tsu, H., Kawakami, T., and Pniel, M. (1998) Overview of Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER). IEEE Transactions on Geoscience and Remote Sensing, 36(4), 1062–1071.