Comparison of VLBI and GPS Total Electron Content Measurements
advertisement

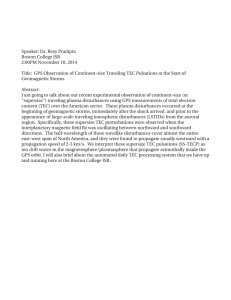
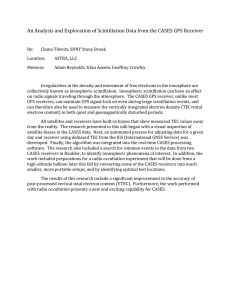
Comparison of VLBI and GPS Total Electron Content Measurements of the Ionosphere and the Effects of Geomagnetic Anomalies 1 2 2 Avery Bruni , Christopher Beaudoin , Anthea Coster , and Philip Erickson 1 2 2 University of Michigan, MIT Haystack Observatory Results Abstract Two different techniques for measuring differenced ionospheric total electron content have previously been established: Very Long Baseline Interferometry, and GPS, but they are subject to different radii of sensitivity. The goal of this research was to compare measurements of the ionosphere between the two methods, hypothesizing that they are both valid techniques for such measurements. It is conceivable that geomagnetic storms could affect the agreement of these two methods, due to the shrinking of the plasmasphere to within the range of detection shared by both, but since VLBI measures differenced TEC, it is hypothesized that the effect of a storm should largely be subtracted out of our detections. The development of a program that can compare these two methods and the results that it has yielded are described and presented in this paper. Feb 19 March 03 March 17 Complete Correlation 0.7455 0.9146 0.6158 Total Number of Points 46 44 38 Total Overlaps 35 37 23 Total Non-Overlaps 11 7 15 Slope of Ideal Line 1.080 ±0.145 1.167 ±0.129 0.939 ±0.249 Intercept -0.577 ±0.273 -0.752 ±0.147 0.275 ±0.314 Average SNR 106.385 128.612 103.629 Average TEC Error 0.674 0.661 0.674 Figure 1: σ values reported by my software, and by Matlab for uniform phase error across frequency. Introduction This research is built upon the project of a previous REU student, Carlos Mulero, who created some software that uses GPS data for TEC taken from the MIT Madrigal database and compares them to TEC measurements from VLBI observations on the same day (baseline from Millstone to GGAO). Since VLBI measures only differenced TEC (DTEC), the comparison was taken between DTEC from VLBI and DTEC from GPS between two points on the earth. These points are derived from the pointing vectors of the two antennas used in the VLBI baseline, and the Madrigal database is then searched for GPS matches to these points. VLBI scans include frequencies approximately from 3GHz - 10GHz, and GPS operates using the L1 and L2 bands (between 1GHz - 2GHz). The goal became to generate accurate error bars for VLBI DTEC measurements, as they are not provided with the current analytical tools at haystack (Fourfit), and to determine what can be learned about the agreement of the two methods by analyzing several datasets during interesting ionospheric events. March 18 April 14 Combined (±1σ) Complete Correlation 0.7608 0.8265 – Total Number of Points 42 38 – Total Overlaps 24 21 – Total Non-Overlaps 18 17 – Slope of Ideal Line 1.052 ±0.166 1.304 ±0.192 1.094 ±0.049 Intercept 0.010 ±0.605 -1.724 ±0.229 -0.588 ±0.102 Average SNR 154.995 75.986 – Average TEC Error 0.647 0.659 – This figure illustrates why a 20 deg elevation cutoff was implemented: to leave out large errors due to the break-down of the mapping function. Conclusion This research has shown that there is a significant bias for larger differenced TEC measurements taken by GPS than by VLBI, but that they agree in slope within the 95% confidence interval. This leads to the conclusion that the two techniques agree to a high extent, and that both are valid methods for measuring the ionosphere. Also, it has been determined that an elevation cutoff of at least 20 degrees, depending on VLBI scan, is necessary to reduce errors associated with the break-down of the mapping function. Figure 2: σ values reported by my software, and by Matlab for non-uniform phase error. Monte Carlo Declare constants: Ideal Tau value, ideal K value, number of trials to be run per phase error point. iTau is set to the value of the multi-band delay as reported by F ourf it, and iK is set to the converted value of TEC as reported by F ourf it. 2 Establish an array of the frequencies to be used to calculate phase (fRange). These frequencies are determined by the center frequencies of the channels used in the F ourf it analysis. 3 Ideal phase array calculated across those frequencies from ideal Tau and K. This row is then repeated n times in order to generate an array of f Range × n dimensions. 4 Noise array generated, to be read one row per trial, generated column-wise with a gaussian random number generator, scaled by the magnitude of the phase standard error at each frequency point. The phase errors per frequency point are taken from F ourf it as SN1 R . 5 Observed phase array (oPhase) calculated by adding the noise array to ideal. 6 For each row of oPhase, a non-linear least squares fitting algorithm, numpy.curve_f it, is applied to the noisy data. A covariance matrix is produced, and the standard error of phase measurement is taken as the square root of the diagonal entries. 7 Store standard errors for Tau and K in arrays tauStds and kStds. 8 Repeat 5-7 nTrials times. 9 Plot Tau error (iTau - eTau) and K error (iK - eK) results in histograms. 10 The averages of tauStds and kStds are returned as the values for Tau and K. 1 Theory The central model to this research describes phase delay and is defined by: K φ = ωτ + (1) ω where φ is the phase delay, ω is the frequency of radiation, τ is the geometric delay in seconds, and K represents the dispersive term, which is a function of TEC. From this model and from plasma physics a relationship to TEC can be derived: 9 1K = 2π · 8.448 · 10 · T ECu (2) Fitting for K yields a slant TEC (STEC), which is the TEC along the line of sight of the antenna/receiver. This must be mapped to a vertical TEC (VTEC) at the ionospheric pierce-point, which is calculated using the thinshell ionosphere model located at 350 km altitude. The mapping function used to convert STEC to VTEC at this point is defined by: 1 M=r 2 e 1 − ReR+H cosγ (3) where Re represents the radius of the earth, H the chosen height of the ionospheric shell, and γ the elevation angle of the antenna. (With the choice of 350 km for H, the cosine coefficient in the above equations reduces to 0.95) Figure 5: Example DTEC for GPS and VLBI as a function of elevation. Future Work: A much larger dataset should be accumulated to compare these DTEC measurements more comprehensively to see if the intercept bias is simply an artifact from the experiments used here. It is also conceivable that improvements to the mapping function could be made to reduce the error even further for mid-elevations. Figure 3: DTEC data from all processed experiments in this research, spanning before, during, and after the geomagnetic storm of March 17th18th, 2015. VLBI elevation cutoff of 20 degrees. Selected References Alizadeh, M., Wijaya, D., Hobiger, T., Weber, R., and Schuh, H. (2013), Ionospheric Effects on Microwave Signals, Sprnger Atmospheric Sciences, 39-43. Takahashi, F., Kondo, T., Takahashi, Y., and Koyama, Y. (2000), Very Long Baseline Interferometer, Ohmsha, Ltd., Tokyo, Japan. Hobiger, T., Kondo, T., and Schuh, H. (2006), Very long baseline interferometry as a tool to probe the ionosphere, Radio Science, 41. chen Chen, F. (2006), Plasma Physics and Controlled Fusion Volume 1: Plasma Physics, Springer Science+Business Media. Acknowledgements Special thanks to the National Science Foundation for supporting this REU program. Grant No. AST1156504. I would also like to thank my chief advisor, Christopher Beaudoin, who met with me many times, providing much help and support through the steep learning curve of this project. And also Mike Titus, another primary mentor who offered me invaluable help and advice throughout the entirety of my research. Also among my advisors for this program were Juha Vierinen, Anthea Coster, Roger Cappallo, and P. J. Erickson. I would like to thank them for their help as well, and willingness to meet with me and offer advice whenever I needed it. I am incredibly thankful to all for their time and effort, and for staying at work a little late now and again in order to help me. Figure 4: Example DTEC data over time for GPS and VLBI.