Chapter 6
Sample Design in Stereology
The fundamental relations in stereology are expected value theorems that
relate measurements that are made on geometric probes passed through a three
dimensional microstructure and corresponding geometric properties of the three
dimensional structure that the probes sample. Implementing any of these relations
requires that a sample of the population of appropriate probes be produced and the
appropriate measurements be made upon the set of probes in the sample. The mean
value of this set of sample measurements is computed. This mean value is then taken
as an estimate of the expected value of the measurement on the population of
probes from which the sample set is drawn.
It is highly desirable that this estimate be unbiased. If this is not guaranteed
by the choice of the set of probes included in the sample set then a great deal of
effort may be expended to produce an estimate of a geometric property which may
be highly precise, but wrong.
In order for the set of probes in the sample to provide an unbiased
estimate of the expected value for the population it is required that the sample
set be drawn uniformly from the population of probes. This is the central
rule in the design of the probe set included in a stereological experiment. This
condition must be satisfied because it is the central assumption made in the
derivation of each of the fundamental relations that lie at the heart of the
methodology of stereology. In order to design a sample of probes that is
selected uniformly from the population of those probes it is necessary to understand what the population is, for each class of probes used in stereological
measurements.
This chapter presents the population for each of the most important probes
that are used in stereology: points, lines, planes and volumes. Once the population
can be visualized for a particular probe class, the ground rules for obtaining a sample
of probes drawn uniformly from each population will become evident. Schemes and
strategies for obtaining a uniformly drawn sample set will then be discussed for each
probe class.
Population of Point Probes
A point on a one dimensional line is specified by assigning a value to a variable x that reports the distance from some conveniently defined origin on the line.
The population of points on a line is the set of values that this variable may be
assigned. For some interval of length L0, which may be viewed as the “specimen”
in this one dimensional world, the population of points in the specimen is the set
of values of x that correspond to points within L0. Since the possible numerical
111
112
Chapter 6
values for x are considered to be distributed uniformly, the set of points is distributed uniformly within L0.
This concept may be extended to a two dimensional “specimen” which
encompasses the total area A0 of interest in an experiment. A point within the
specimen is defined by constructing a convenient Cartesian coordinate system with
x and y axes and assigning particular values to x and y. The population of points
in the specimen is the set of all possible combinations of values for x and y that lie
within A0. Again, since the numerical values of x and y are distributed uniformly,
the set of points in the population are uniformly distributed over the area of the
specimen.
In order to specify a point in three dimensional space it is necessary to assign
a value to three variables, e.g., the Cartesian coordinates (x, y, z). Each point in the
volume V0 of the macroscopic specimen is given by its corresponding three coordinates. The population of points that lie within the specimen is the collection of all
possible values of the triplet (x, y, z) that describe points contained within its boundaries. These points are uniformly distributed in the volume of the specimen.
Since the points in these Cartesian spaces represent a continuum there is a
conceptual problem in counting how many points are contained in a given domain
in any of these that spaces. Even the smallest finite domain contains an infinite
number of points. Indeed domains of different sizes and shapes each contain an
infinite number of points. There is an infinite number of points in the interval from
x = 0 to x = 1 on the x-axis, but there is also, conceptually, an infinite number of
points in the interval from 0 to 1/2. Intuitively it seems that there should be “twice
as many” points between 0 and 1 as there are between 0 and 1/2.
This problem is solved by introducing the concept of the “measure of the
set of points” in a domain in any space. The measure of the set of points in an interval on a line is the length of the interval assuming that the density of points is
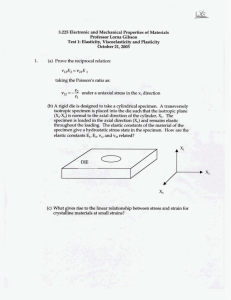
uniform along the line. Thus, the measure of the set of points contained in a one
dimensional “specimen” of length L0 is equal to L0. The measure of the set of points
in some short segment of length l contained within the specimen, as shown in
Figure 6.1a, is equal to the length l. With these concepts, the fraction of points in
the specimen that lie within the segment l is the ratio of these measures: fl = l /L.
In two dimensional space the measure of the set of points in any domain is
equal to the area A of that domain. The population of points in the two dimensional specimen in Figure 6.1b has a measure equal to A0. The set of points that lie
within the b phase particles in this figure has measure Ab, the total area of this collection of particles. The fraction of points that lie within the b phase is the ratio of
these measures: Ab /A0 = AAb, the area fraction occupied by the b phase. Thus for
the entire population of points in the specimen the point fraction equals the area
fraction, which is the basis for equation (4.2) in Chapter 4.
In three dimensional space the measure of the set of points in a domain is
the volume V of the domain. For a specimen this measure is the volume V0 of the
specimen. The measure of the set of points within a set of b features contained in
the specimen is their volume Vb. The fraction of points in the specimen that lie
within the set of b features is the ratio of these measures, Vb /V0. This is the basis
for the classic volume fraction relation in Chapter 4, equation (4.5)
Sample Design in Stereology
113
a
b
c
Figure 6.1. Measures of line length (a), area (b) and angle (c) as discussed in the text.
(For color representation see the attached CD-ROM.)
114
Chapter 6
In a stereological experiment a sample is drawn from the population of
points in the specimen. The total number of points in the sample is PT and Pb is the
number of these points that lie within the b feature set. The ratio of these two counts
is then used to estimate the expected value for this ratio of these measures for the
populations of points in the specimen. This estimate will be unbiased if and only if
the points in the sample are drawn uniformly from the population of points in the
volume of the specimen, V0.
As example, suppose there were a gradient in the volume of the b phase so
that the volume fraction of b increased as the specimen was traversed from top to
bottom. If in the experimental sample of point probes was confined to a single plane
near the top of the specimen then the mean of this sample will underestimate VV
since there is less b phase near the top than the bottom. This sample provides a
biased estimate of the expected value of PP. If it were known a priori that the gradient in b was one dimensional and in the vertical direction, then a plane in the vertical direction would capture the gradient and sample it uniformly. Armed with the
a priori information in this case, points drawn in a single appropriately chosen plane
could produce an unbiased estimate of PP.
If the b particles are themselves uniformly positioned over the area of the
specimen then the sampling problem is simplified. For example, all of the points in
the sample could come from one region in the specimen and the resulting mean
value would be an unbiased estimate of the population expected value. Uniformity
(or the absence of gradients) may be characteristic of some man-made materials,
but most specimens will contain gradients in structure. The assumption of uniformity must be verified before it is used in an implementation that simplifies the stereological design.
Thus, in the general case the positional variation of the volume of the b
feature set is either unknown, or of such a nature that it can’t be captured in a single
plane. In the absence of a clear knowledge that the volume of the features in the
sample is uniformly distributed, or has a simple, one dimensional spatial variation,
the sample of point probes must be distributed uniformly throughout the volume
of the specimen. In this general case an unbiased estimate for PP is obtained only
if the set of points chosen for inspection in the sample is uniformly distributed over
the volume V0 of the macroscopic specimen.
A specimen exhibiting gradients in VV does not necessarily require a great
deal more effort to estimate PP than does a specimen in which the b phase is uniformly distributed. It is only necessary to plan ahead (design) in cutting up the specimen for preparation and inspection. For example, the specimen may be diced into
a number of chunks. Pieces selected randomly and uniformly from these chunks
(applying the fractionator {Howard & Reed, 1998b} principle described below) may
all be mounted in a single mount. A single plane sectioned through this aggregate
would provide fields of view that uniformly sample the volume V0 of the specimen.
Grids imposed on fields selected for measurement would provide an unbiased
sample of the population of points in V0.
This sampling strategy, which inspects points that are uniformly drawn from
the population of points in the specimen, gives an unbiased estimate of the expected
value for the structure no matter how the features are distributed.
Sample Design in Stereology
115
The Population of Lines in Two Dimensions
The only attribute that points have is position {x, (x, y), or (x, y, z)}. A line
drawn in a plane has both position, p, and orientation, q. In two dimensions an orientation of a line is represented by a point on a unit circle of orientations, as shown
in Figure 6.1c. The population of orientations is the set of points on the unit circle.
The measure of the set of orientations in two dimensional space given by the
measure of the set of points on the circumference of the unit circle: 2p. The measure
of the set of orientations contained in some angular range a, as shown in the figure,
is the length of the arc on the unit circle that contains the set of points that correspond to the directions encompassed by a. The fraction of orientations that lie in
a is the ratio of these two measures, a/2p. For a line probe, in which adding 180
degrees to the angle of the line produces the same result, the orientations are measured over half the unit circle and the fraction of orientations contained within some
angular range a is a /p.
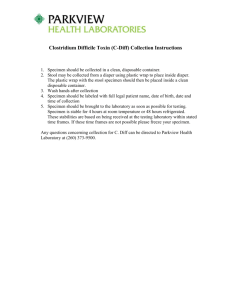
Consider now the subset of the population of lines in two dimensional
space that all have the same direction, as shown in Figure 6.2a. To aid in describing the population of positions of lines, construct a convenient Cartesian coordinate system with origin O and x and y axes. Construct a line OA through the origin
in a direction perpendicular to that of the subset of oriented lines. An individual
line in this subset of lines is located uniquely by a position on the line OA. The
measure of the set of lines that have the orientation shown and are contained in
some interval BC on OA is the measure of the set of points in this interval, and is
therefore the length BC.
Thus, a given line in two dimensional space is given by a pair of numbers:
( p, q). The population of lines is represented by the values of q from 0 to p and,
for a given value of q, a range of p values that encompass the specimen. The population of orientations may be guaranteed to be uniformly sampled by simply using
circles as line probes as illustrated in Figure 4.8.c. If the set of circles contained in
the sample is distributed uniformly with respect to position over the specimen area
then the population of lines is guaranteed to be sampled uniformly in both position
and orientation. Observations obtained from such a sample will provide an unbiased estimate of the expected value of some measure derived from the population
of lines in two dimensional space.
Line Probes in Three Dimensions
As in two dimensions, a line in three dimensional space has both orientation
and position. An orientation may be described by a point on the unit sphere. The
coordinates of such a point are given by two angles, as they are on a globe that
maps the earth, as shown in Figure 6.2b (see also Figure 4.12). The longitude, q, is
represented by a polar circle that passes through a point on the circle of the equator.
The angle q is measured relative to a reference direction defined to be 0 longitude
(through Greenwich on the globe). The latitude f may be specified by the angle
between the point (q, f) on the sphere and the north pole. (By convention on the
globe latitudes are specified by the compliment of f, i.e. by the angle along a
116
Chapter 6
a
b
Figure 6.2. An array of lines with a given orientation in a plane (a), and the measure
of a range of angles (b) as discussed in the text. (For color representation see the
attached CD-ROM.)
longitude at f from the equator to the point (q, f). In this text latitude will be specified by the angle from the pole, sometimes called the colatitude.)
A continuous range of orientations in space maps as some domain on the
unit sphere called its spherical image, as discussed in Chapter 5. The measure of the
set of orientations represented by this domain is the measure of the set of points
on the unit sphere contained in its spherical image, which is an area on the unit
sphere, as shown in Figure 5.1. In terms of the variables (q, f) a small patch of this
area is given by sin f · dq df. The sin f factor arises because the arcs bounding this
element in latitude are arcs of a small circle (as opposed to a great circle), which
has a radius of r sin f where r = 1 is the radius of the sphere. Integration of this
function over the range of longitudes and latitudes corresponding to some domain
of orientations on the sphere gives the spherical image of the patch. For example,
integration over the northern hemisphere gives the area of the hemisphere 2p.
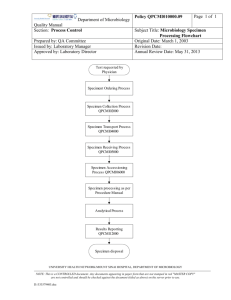
Now consider the subset of lines in three dimensional space that all share
the same orientation, as shown in Figure 6.3a. This positional aspect to defining a
line in three dimensional space may be visualized by constructing a plane that is
Sample Design in Stereology
117
a
b
Figure 6.3. Arrays of parallel lines (a) and planes (b) in 3D space as discussed in the
text. (For color representation see the attached CD-ROM.)
perpendicular to the orientation of the line set. A Cartesian coordinate system in
this plane facilitates defining the location of a particular line. A particular line is
then represented by a point (x, y) on this plane. A set of lines that lie in some region
on this plane (e.g., the set of lines that intersect a particular particle of b in the
specimen) is represented by the set of points (x, y) contained in that domain. The
measure of this set of oriented lines is thus the measure of this set of points, which
is the area of the domain on the plane.
Thus, a line in three dimensional space requires four variables for its complete specification: two orientation variables (q, f) and, for a given (q, f) two
position variables (x, y). The measure of a set of orientations is an area on the
unit sphere and, for a given orientation, the measure of a set of positions is an area
118
Chapter 6
on the plane which is perpendicular to the orientation direction. In selecting a set
of lines to be included in a sample from this four-variable population it is necessary
that the two sets of points represented in the construction be sampled uniformly.
A sampling strategy, called the method of vertical sections, provides a simple
and automatic procedure for guaranteeing such a uniform sample of positions and
orientations of line probes from the population of lines in three dimensional space.
Planes in Three Dimensional Space
Like a line, a plane in three dimensional space has an orientation and a position, as shown in Figure 6.3b. The orientation of a plane is unambiguously described
by the direction of a line that is perpendicular to the plane, called the normal to the
plane. Since the plane normal is a line, the measure of a set of plane orientations is
identical with that described for lines in three dimensional space, i.e., the area of the
spherical image of the plane normals in the set.
Specification of the orientation of a plane in space by the angles (q, f) does
not complete the description of the plane. There is an infinite set of parallel planes
that all share a given orientation. A specific plane in such a set of parallel planes
may be specified by constructing a convenient Cartesian coordinate system and constructing the line OA through its origin that is parallel to the direction given by
(q, f). The position of a plane is given by its distance p from the origin along that
line. The measure of the set of planes in some interval on OA is the measure of the
set of points that lie in that interval. We have seen earlier that the measure of the
set of points in an interval on a line is the length of the interval.
Thus, a particular plane in three dimensional space is described by three
numbers in some convenient Cartesian coordinate system: ( p, q, f). The measure of
the set of orientations is an area on the unit sphere of orientations and the measure
of the set of positions is a length on a line in the direction of the plane normal. In
designing a sample of a set of planes in a stereological experiment it is required that
their orientations and positions be uniformly chosen from these measures.
Producing a uniform sample of orientations and positions of plane probes
in three dimensional is perhaps the most challenging of the sampling problems in
stereology. Chapter 7 describes procedures that have been used.
Disectors in Three Dimensional Space
The disector sample consists of a rectangular prism with areas A of the top
and bottom faces and a known thickness, h, as shown in Figure 6.4. It is used to
sample a volume V = A0h. An individual disector may be specified by the coordinates (x, y, z) of a convenient point in the box, e.g., one of its corners. There are
no orientation variables involved in this specification. Since for every disector there
is one such point and for every point in space there is a unique disector, the population of the set of disectors in space is identical with the population of the set of
points in three dimensional space.
A uniform sample may be selected from the population by selecting points
that locate the disector from the uniform population of points in the specimen.
Sample Design in Stereology
119
Figure 6.4. The populations of disectors in a three dimensional space is identical to the
population of points, since each disector may be located by the position of one of its
corners. The volume analyzed by each is A0h. (For color representation see the
attached CD-ROM.)
Sampling Strategies in Stereology
In order for the mean of a sample of stereological measurements to provide
an unbiased estimate of the expected value of that measurement for the probe population that corresponds to the measurement it is necessary that the set of probes
chosen for examination be drawn uniformly from the population of those probes in
three dimensional space. The population of probes may be described by position
variables, and by orientation variables. For point probes and disector probes the set
of sample probes must be drawn uniformly from the population of points that
occupy the specimen. For line and plane probes the sample must also be drawn
uniformly from the set of points on the unit sphere of orientation. Once an appropriate sample of probes has been obtained, the corresponding counts are made
and the fundamental relations of stereology are then applied to estimate the
geometric property that is of interest in the experiment.
Producing such a uniform sample may at first appear to be a daunting task.
One might imagine that it would require a large number of fields to produce such
a sample, or to prepare a number of sections from several places in the specimen.
However, the sampling strategies discussed in this section do not require measurements on significantly more fields than might be needed to produce an estimate for
a structure which is itself uniform. It is only necessary to plan ahead in sectioning
120
Chapter 6
the specimen and collecting a random, uniform set of the pieces. In some cases this
sample set of pieces can all be mounted together in one mount for subsequent preparation and measurement.
An additional principle which is important in fostering inclusion of a representative uniform sample of probes from the their population is “Do more less
well” (Gundersen & Osterby, 1981). It is better to choose magnification and grid
scales so that a few counts are made on a large number of fields rather than a larger
number of counts on a few fields. This strategy not only includes more regions of
the specimen in the sample but, by encouraging collection of a few counts on the
typical field, helps to minimize counting errors.
A primary strategy used to sample uniformly with respect to position has
been called the fractionator (Howard & Reed, 1998b). The specimen is cut into a
number N of pieces; depending upon the application, these pieces may be sliced,
then cut into sticks or rods and or into smaller pieces. Some preliminary experiments determine roughly what fraction, f, of these pieces will be included for mounting and examination. These pieces are chosen randomly and uniformly from the
population of pieces using a random systematic sampling strategy similar to that
discussed in Chapter 4.
Spread out the pieces in a row on a table. Suppose N = 29, and on the basis
of preliminary study it is decided that a total of about six of these pieces will form
a convenient mounting for analysis. Imagine the pieces on the table are numbered
1 through 29. An exhaustive collection of samples from the set of pieces may be
obtained by selecting every fifth piece starting with, respectively,
A
B
C
D
E
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
—
Sample set E has only 5 members because 29 is not divisible by 5, but that
still satisfies our choice of “about six” pieces for analysis. Choose a random number
from 1 to 5 to select sample A, B, C, D or E for analysis. Suppose the number comes
up 4, so that sample D is chosen. Then the pieces
D
4
9
14
19
24
29
will be mounted for preparation and subsequent analysis.
If the 29 pieces were laid out on the table without paying attention to where
they came from in the specimen, sample D (or for that matter, any of the samples)
provides a random sample of the population of pieces. Every piece in the set of 29
pieces has an equal probability of being included in the sample. If on the other hand
the pieces are laid out in some order with respect to position in the original specimen (e.g., slices from “top” to “bottom”) then the selection of one sample, D, constitutes a random systematic sample of the population of, in this case, slices. In this
Sample Design in Stereology
121
case every sample (A, B, C, D, E) has an equal probability of being included in the
measurement.
This difference has been found to be important in the design scheme for stereological experiments. In the simple random sample there is some chance that the
pieces in a given sample chosen for measurement may all come from near the top
of the specimen, or be otherwise localized. In the random systematic sample each
sample set has pieces that are uniformly distributed from top to bottom. Both
samples produce unbiased estimates of population expected values as required by
the stereological relationships.
However experience has shown that the variance associated with the set
of sample means is very much smaller (by a factor of 2 or 4 or perhaps more
{Gundersen & Jensen, 1987}) for the random systematic sample than for the simple
random sample. This result has important practical implications for the level of
effort required to obtain a given precision in the statistical experiments of stereology. The precision of an estimate of a mean value is given by the confidence interval assigned to the estimate of the mean. The confidence interval is a range about
the estimated mean defined by
C .I . = x ± 2s x
(6.1)
where s x is the standard error of the mean computed from the sample. This “95%
confidence interval” means that the probability that the true mean of the population lies within this interval is 0.95. The precision with which the mean of the population is estimated is thus determined by s x . This property is computed from the
standard deviation sample measurements, sx, given by
sx =
sx
n
(6.2)
where n is the number of readings (fields) in the sample. The smaller the
confidence interval, the more precise is the estimate. Precision can be increased in
two ways:
1. Increasing the number of fields n measured in the sample: (Taking four times
as many measurements cuts the confidence interval in half, making the estimate “twice as precise”);
2. Decreasing the standard deviation of the sample, which is an estimate of the
square root of the variance of the population.
Applying the strategy of the random systematic sample decreases the variance (in comparison with a simple random sample), decreasing sx and thus s x and
the confidence interval for a sample of a given size, n. Halving the variance cuts the
confidence interval in half.
Applying the strategy of the random systematic sample permits attainment
of a given precision with fewer counts, or, for the same number of counts, increases
the precision. This sampling strategy is now widely used in stereology because it significantly increases the efficiency of these techniques. Implementation of this strategy requires only conscious planning of the choices made in designing a sample for
122
Chapter 6
a
b
Figure 6.5. A procedure for obtaining IUR vertical sections: a) the specimen is cut into
vertical samples; b) a structured random procedure for selecting an appropriate subsample of these is used; c) the selected prisms are rotated either randomly or by structured random angles; d) the rotated prisms are embedded and sectioned. On the
resulting section image the use of cycloid grids will provide isotropic, uniform and
random sampling of orientations in the microstructure. (For color representation see the
attached CD-ROM.)
Sample Design in Stereology
123
c
d
Figure 6.5. Continued
124
Chapter 6
analysis, i.e., where the specimen should be cut and how the pieces should be chosen
for preparation and examination.
This fractionator approach can be implemented for each of the stereological probes that have been described.
1. In using the Cavalieri method to estimate the volume of an object the pieces
may be slices obtained by microtoming the sample.
2. The point count may be also applied to this fractionated sample of slices
through the structure. On a given slice fields chosen for measurement may
be chosen from the set of possible fields by another fractionating process.
3. The method of vertical sections may be applied to a fractionated sample of
pieces obtained from the specimen by cutting it as you would to make french
fries from a potato. This is illustrated in Figure 6.5. The vertical direction in
the sample is the long dimension of these stick shaped pieces. Rotating the
sticks randomly or using a systematic random rotation of the pieces about
the vertical axis when placing them in the mounting powder with long
(vertical) axes parallel provides a uniform sample of longitudinal directions
as well as a clear indication of the vertical direction in every field. Using
a cycloid test line uniformly samples latitude directions. A single section
reveals structure that uniformly samples position in the x, y, and z directions
and orientation in q and f. Random systematic sample of all of the possible fields that may be constructed on this one section provides a uniform
isotropic random sample for analysis.
4. It mat be possible to produce an isotropic, uniform random sample by dicing
the specimen into small pieces that are equiaxed, (e.g., cubes), fractionating
them and mounting them with uniform random rotations as they are placed
in the mounting medium. Then any plane section through the structure will
produce an IUR sample of points, lines and planes. The practical difficulty
associated with such a method is contained in the phrase “mounting them
with random uniform rotations”.
These examples are not practical in all cases and are presented here to illustrate the principle that, once the ground rules are clearly formulated for obtaining
a “representative” sample from a population of probes, a little ingenuity applied in
the original design of the experiment may solve the sampling problem in stereology
without a great deal of additional effort expended in making the measurements.
Chapter 7 discusses some of the practical sampling procedures that may be used.
Summary
Each of the stereological relationships assumes that the population of probes
used in the experiment is uniform over the domain of the specimen. Knowledgeable
design of stereological experiments requires that the nature of these probe populations be clearly understood. Each class of probes has a population that is described
by the variables necessary to define an individual probe.
Sample Design in Stereology
125
The population of point probes in two dimensions is the
set of all possible position pairs (x, y) in the specimen. The
measure of the set of point probes in a given region is the area
of that region.
The population of point probes in three dimensions is the
set of all possible position triplets (x, y, z) in the specimen. The
measure of the set of point probes in a given region is the
volume of that region.
The population of line probes in three dimensions is the
set of all possible points (q, f) on the sphere of orientation and,
for a given such orientation, the set of points (x, y) on a plane
perpendicular to that orientation. The measure of the set of
orientations in a region of orientations is an area on the sphere
of orientation. For a set of lines, the range of orientations is an
area on the hemisphere of orientation. The measure of the set
of positions of lines with a given orientation is an area on the
plane perpendicular to that orientation.
The population of plane probes in three dimensions is the
set of points (q, f) on the unit sphere or hemisphere designated
by the normal to any given plane, and the set of positions p of
points along a line in that direction. The measure of the set of
orientations is an area on the sphere and the measure of the set
of positions of planes is a length along their normal directions.
The population of disectors in three dimensional space is
the same as the population of points, since each disector may be
uniquely located by one of its corner points.
The fractionator strategy envisions cutting the specimen into a large number
of pieces then, using a simple random or a random systematic method, selects a
uniformly representative small sample from the population of pieces for analysis.
With careful planning in the design of the sample it is possible to satisfy the
isotropic uniform random sampling requirement of stereology without significant
additional effort. Chapter 7 discusses some representative implementations of such
strategies.
 0
0
advertisement
Related documents

Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users