iSAM2: Incremental Smoothing and Mapping with Fluid
advertisement

iSAM2: Incremental Smoothing and Mapping with Fluid
Relinearization and Incremental Variable Reordering
Michael Kaess, Hordur Johannsson, Richard Roberts, Viorela Ila, John Leonard, Frank Dellaert
x303,x399,x400
x300,x307 : x303,x399
Abstract— We present iSAM2, a fully incremental, graphbased version of incremental smoothing and mapping (iSAM).
iSAM2 is based on a novel graphical model-based interpretation
of incremental sparse matrix factorization methods, afforded by
the recently introduced Bayes tree data structure. The original iSAM algorithm incrementally maintains the square root
information matrix by applying matrix factorization updates.
We analyze the matrix updates as simple editing operations
on the Bayes tree and the conditional densities represented by
its cliques. Based on that insight, we present a new method
to incrementally change the variable ordering which has a
large effect on efficiency. The efficiency and accuracy of the
new method is based on fluid relinearization, the concept of
selectively relinearizing variables as needed. This allows us
to obtain a fully incremental algorithm without any need for
periodic batch steps. We analyze the properties of the resulting
algorithm in detail, and show on various real and simulated
datasets that the iSAM2 algorithm compares favorably with
other recent mapping algorithms in both quality and efficiency.
x393 : x300,x307,x399
x388,x385,x383 : x300,x307,x393
x384 : x383,x385
x253,x360,x264,x250,x357,x353 : x300,x307,x349,x352,x369
x263 : x250,x258,x264,x349,x352,x357,x360,x369
x261 : x250,x258,x263,x349,x357
x262 : x261,x263,x349
x351 : x263,x349,x352,x360
x259 : x250,x258,x261
x260 : x259,x261
x246 : x249,x264,x300,x369
x350 : x349,x351
x299 : x297,x300
x297,x295,x272 : x246,x249,x264,x300
x294 : x272,x295
x298 : x297,x299
x273 : x272,x294
x286 : x279,x287
x276 : x273,x279,x289,x293
x288 : x279,x287,x289
x278 : x276,x279,x289,x293
x274 : x273,x276,x293
x282 : x280,x286
x285 : x282,x286
x281 : x280,x282
x290 : x276,x278,x289,x293
x277 : x276,x278,x290
x284 : x282,x285
x268 : x246,x249,x264,x271,x295
x137 : x130,x136,x139,x143,x181
x140 : x139,x141,x181
x138 : x130,x137,x139
x144 : x136,x143,x145
x147 : x130,x134,x139,x145,x171,x181
x133 : x130,x134,x147,x171,x181
x170 : x147,x171
x131 : x130,x133,x147
x169 : x147,x170
x142 : x141,x143
x132 : x131,x133
x157 : x156,x158
x161 : x159,x162
x155 : x154,x156
x183 : x182,x184,x238
x248 : x247,x249
x266 : x265,x267
x120 : x119,x121,x174
x126 : x86,x125,x127
x122 : x82,x105,x121,x125
x80 : x79,x81
x236 : x186,x235,x237,x240,x242
x188 : x187,x189,x233,x234
x130 : x127,x184,x189,x231,x238,x240
x95 : x94,x96
x118 : x96,x102,x105,x119
x124 : x122,x125
x148 : x147,x149
x237 : x184,x186,x235,x238,x240,x242
x231,x127 : x184,x189,x233,x238,x240
x190 : x127,x189,x231,x233
x128 : x127,x130,x189
x109,x113 : x105,x118
x123 : x122,x124
x107 : x105,x109,x113,x118
x108 : x107,x109,x113
x115 : x107,x113,x118
x159,x154 : x149,x164
x167 : x164,x168
x116 : x107,x115,x118
x150 : x149,x154,x159
x166 : x164,x167
x117 : x116,x118
x153 : x150,x154
x165 : x164,x166
x340 : x339,x341
x104 : x103,x105
x83 : x82,x86,x96,x102
x77 : x78
x85 : x83,x86
x101 : x83,x96,x102
x76 : x77
x84 : x83,x85
x100 : x96,x101
x75 : x76
x111 : x110,x113
x99 : x96,x100
x74 : x75
x112 : x111,x113
x98 : x96,x99
x73 : x74
x97 : x96,x98
x72 : x73
x151 : x150,x152
x376 : x343,x375,x378
x377 : x376,x378
x304 : x303,x305
x312 : x308,x314,x343,x388,x392
x390 : x312,x343,x388,x392
x389 : x388,x390
x391 : x312,x390,x392
x313 : x312,x314
x346 : x308,x343,x349,x392
x310 : x308,x312,x343
x309 : x308,x310
x311 : x310,x312
x344 : x343,x346,x392
x345 : x344,x346
x348 : x346,x349
x347 : x346,x348
x372 : x370,x373
x371 : x370,x372
x326 : x324,x327
x215 : x199,x200,x219,x224
x197 : x196,x198,x221
x223 : x200,x222,x224
x216 : x200,x215,x219,x224
x201 : x200,x215,x216
x218 : x216,x219
x214 : x200,x201,x215
x217 : x216,x218
x208,x210 : x200,x201,x214
x209 : x208,x210
x213 : x200,x201,x208,x210,x214
x203 : x201,x208,x210,x213
x212 : x201,x203,x210,x213
x211 : x203,x210,x212
x207 : x203,x208
x202 : x201,x203,x212
x206 : x203,x207
x45,x68 : x69
x205 : x203,x206
x40,x43 : x45,x68
x67 : x40,x45,x68
x204 : x203,x205
x44 : x43,x45
x42 : x40,x43
x47 : x40,x45,x67
x41 : x40,x42
x58 : x40,x47,x67
x64 : x47,x58,x67
x54 : x40,x47,x58
x66 : x64,x67
x63 : x58,x64
x14,x7 : x40,x54,x58
x65 : x64,x66
x62 : x58,x63
x37 : x7,x14,x40
x39 : x37,x40
x38 : x37,x39
x335 : x334,x336
x373 : x370,x374
x325 : x324,x326
x198 : x196,x199,x221,x222
x69 : x70
x160 : x159,x161
x61 : x58,x62
x320 : x318,x321
x319 : x318,x320
x374 : x370,x375
x324 : x323,x328
x200 : x199,x219,x222,x224
x70 : x71
x59 : x58,x60
x318 : x317,x321,x383
x331 : x323,x332
x336 : x334,x337
x225 : x224,x226
x221 : x196,x199,x220,x222
x71 : x72
x152 : x150,x153
x60 : x58,x61
x382 : x381,x383
x323 : x322,x332,x379
x334 : x333,x337,x383
x327 : x324,x328
x196,x220 : x195,x226
x222,x199 : x196,x219,x220,x224
x78 : x79,x175
x46 : x45,x47
x321 : x317,x322,x333,x383
x305 : x303,x306
x378 : x343,x375,x379
x224,x219 : x196,x220,x226
x175 : x79,x119,x174,x176
x103 : x79,x102,x105
x322 : x317,x333,x379,x383
x381 : x322,x333,x379,x383
x332 : x322,x333,x379,x381
x370 : x352,x369,x375
x392 : x308,x314,x343,x349,x388,x393
x328 : x323,x329
x226 : x195,x227
x192 : x191,x193
x229 : x228,x230
x102 : x79,x82,x86,x96,x105,x119
x380 : x322,x333,x379,x381
x342 : x339,x343
x333 : x317,x337,x379,x383
x394 : x393,x395
x397 : x396,x398
x329 : x323,x330
x195 : x194,x227
x191 : x127,x190,x193
x230 : x228,x231
x338 : x314,x337,x339
x341 : x339,x342
x375 : x343,x352,x369,x379
x330 : x323,x331
x185 : x184,x186,x237
x232 : x190,x231,x233
x193 : x127,x190,x194,x227,x231
x228 : x193,x227,x231
x176 : x79,x94,x119,x174,x177
x110 : x109,x113
x106 : x105,x107
x114 : x113,x115
x315 : x314,x316
x241 : x236,x240,x242
x194,x227 : x127,x190,x231
x129 : x128,x130
x93 : x92,x94,x177
x96 : x79,x82,x86,x94,x105,x119
x81 : x79,x82,x121
x316 : x314,x317,x339,x385,x388
x386 : x316,x385,x388
x387 : x386,x388
x233,x189 : x184,x187,x235,x238,x240
x79,x119 : x86,x94,x127,x174,x177
x121 : x79,x82,x86,x105,x119,x127,x174
x364 : x363,x365
x366 : x365,x367
x234 : x187,x189,x233,x235
x105,x82 : x79,x86,x94,x119,x127,x174
x125 : x82,x86,x105,x121,x127
x367 : x264,x365,x368
x359 : x249,x358,x360
x86,x94,x177 : x92,x127,x174,x179,x231
x87 : x86,x88
x361 : x357,x360,x362
x339 : x314,x317,x337,x343,x385,x388
x308 : x307,x314,x343,x349,x388,x393
x317,x337 : x314,x343,x379,x383,x385,x388
x306 : x303,x307
x302 : x301,x303
x395 : x307,x393,x398
x396 : x307,x395,x398
x379 : x314,x343,x352,x369,x383,x385,x388
x355 : x307,x354,x356
x240,x238,x184,x186 : x187,x235,x242
x174,x179,x92 : x127,x130,x135,x143,x184,x231,x238
x88 : x86,x92,x177,x179,x231
x365 : x253,x264,x353,x357,x363,x368
x242,x235 : x187,x243
x143,x135 : x127,x130,x184,x231,x238,x240
x239 : x135,x143,x184,x238,x240
x178 : x88,x92,x177,x179
x362 : x357,x360,x363
x358 : x249,x257,x264,x357,x360
x187,x243 : x244
x269 : x268,x270
x275 : x274,x276
x91 : x88,x92,x178
x90 : x88,x91
x356 : x307,x354,x357
x257 : x249,x256,x258,x264,x357,x360
x255 : x254,x256,x369
x296 : x271,x295,x297
x267 : x265,x268
x172 : x92,x130,x171,x174
x173 : x172,x174
x89 : x88,x90
x164 : x149,x168
x158 : x156,x159
x162 : x159,x163
x180 : x145,x171,x179,x181
x146 : x134,x145,x147
x149 : x147,x169
x168 : x149,x169
x156 : x154,x159,x164
x163 : x156,x159,x164
x182 : x134,x135,x136,x181,x184,x238
x354 : x250,x307,x353,x357
x363 : x253,x264,x307,x353,x357,x360,x368
x251 : x250,x252
x254 : x253,x256,x369
x270 : x268,x271,x295
x247 : x246,x249,x265
x171 : x92,x130,x135,x143,x174,x179,x184,x238
x136,x181,x134 : x130,x135,x143,x171,x179,x184,x238
x141 : x137,x139,x143,x181
x244 : x245
x292 : x276,x290,x293
x291 : x290,x292
x283 : x282,x284
x139,x145 : x130,x134,x136,x143,x171,x179,x181
x245 : x246
x265 : x246,x249,x264,x268
x280 : x279,x286
x368 : x253,x264,x307,x353,x357,x360,x369
x252 : x250,x253,x258
x256 : x249,x253,x258,x264,x357,x360,x369
x271 : x246,x249,x264,x272,x295,x297
x293 : x273,x294
x289,x279,x287 : x273,x293
x258 : x250,x253,x264,x300,x349,x352,x357,x360,x369
x249 : x250,x253,x258,x264,x300,x357,x360,x369
x301 : x300,x303,x399
x398 : x307,x393,x399
x352,x349,x369 : x300,x307,x383,x385,x388,x393
x314,x343 : x307,x349,x352,x369,x383,x385,x388,x393
x56 : x7,x14,x54,x58
x19 : x7,x14,x37
x15 : x7,x14,x19
x51 : x40,x47,x54
x5,x8 : x7,x14,x56,x58
x27 : x19,x37
x57 : x5,x56,x58
x18 : x15,x19
x36 : x27,x37
x26 : x19,x27
x17 : x15,x18
x35 : x27,x36
x21 : x19,x26
x16 : x15,x17
x34 : x27,x35
x25 : x21,x26
x55 : x7,x54,x56
x9 : x5,x8,x14
x53 : x51,x54
x50 : x47,x51
x52 : x51,x53
x49 : x47,x50
x6 : x5,x7
x48 : x47,x49
x13 : x5,x9,x14
x10 : x5,x9,x13
x20 : x19,x21
x4 : x3,x5
x3 : x5,x10
x12 : x10,x13
x2 : x3
x11 : x10,x12
x33 : x27,x34
x24 : x21,x25
x32 : x27,x33
x23 : x21,x24
x1 : x2
x31 : x27,x32
x22 : x21,x23
x0 : x1
x30 : x27,x31
x29 : x27,x30
x28 : x27,x29
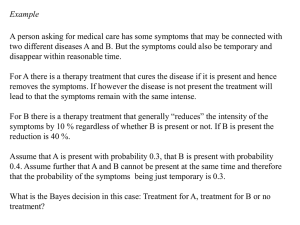
Fig. 1: iSAM2 is based on viewing incremental factorization as editing the
graphical model corresponding to the posterior probability of the solution.
In particular, the graphical model we use is the Bayes tree [17]. Above, we
show a snapshot of this data structure at step 400 of the Manhattan sequence
shown in Fig. 4. As a robot explores the environment, new measurements
only affect parts of the tree, and only those parts are re-calculated.
I. I NTRODUCTION
Knowing the spatial relationship between objects and locations is a key requirement for many tasks in mobile robotics,
such as planning and manipulation. Such information is often
not available prior to deploying a mobile robot, or previously
acquired information is outdated because of changes in the
environment. Automatically acquiring such information is
therefore a key problem in mobile robotics, and has received
much attention. The problem is generally referred to as
simultaneous localization and mapping (SLAM).
In this work we focus on the estimation problem in SLAM.
The SLAM problem consists of multiple components: processing the raw sensor data, performing data association and
estimating the state of the environment. The first component
is very application dependent, while the latter two are
connected. We have previously addressed data association
[1] in a way that is also applicable here.
For solving the estimation problem we look towards
incremental, probabilistic inference algorithms. We prefer
probabilistic algorithms to handle the uncertainty inherent
in sensor measurements. Furthermore, for online operation
in most mobile robot applications it is essential that current
This work was partially funded under NSF grant 0713162 and under ONR
grants N00014-06-1-0043 and N00014-10-1-0936. V. Ila has been partially
supported by the Spanish MICINN under the Programa Nacional de Movilidad de Recursos Humanos de Investigación. M. Kaess, H. Johannsson, and
J. Leonard are with the Computer Science and Artificial Intelligence Laboratory (CSAIL), Massachusetts Institute of Technology (MIT), Cambridge,
MA 02139, USA {kaess, hordurj, jleonard}@mit.edu.
R. Roberts, V. Ila, and F. Dellaert are with the School of Interactive
Computing, Georgia Institute of Technology, Atlanta, GA 30332, USA
{richard, vila, frank}@cc.gatech.edu
state estimates are available at any time, which prevents the
use of offline batch processing.
A common solution to the estimation problem is smoothing and mapping or SAM [2], [3], also known as full SLAM
[4] and is closely related to structure from motion [5] and
bundle adjustment [6]. Smoothing estimates the complete
robot trajectory and, if applicable, a map. This is in contrast
to filtering which only recovers the current robot pose, but
has been shown to be inconsistent [7] in the context of
SLAM. To provide an efficient solution to the smoothing
problem, a range of approaches have been proposed [3],
[4], [8]–[16] that exploit the special sparsity structure of the
problem or deploy approximations, or a combination of both.
Common methods are either based on a graphical model
approach or a sparse linear algebra solution.
In this work we present a novel incremental solution
to SLAM that combines the advantages of the graphical
model and sparse linear algebra perspective. Our approach,
nicknamed iSAM2, is based on the insight that incremental
factorization can be seen as editing the graphical model
corresponding to the posterior probability of the solution. In
particular, the graphical model we use is the Bayes tree [17],
which is closely related to the junction tree. Figure 1 shows
an example of the Bayes tree for a small sequence. As a robot
explores the environment, new measurements only affect
parts of the tree, and only those parts are re-calculated. While
the Bayes tree data structure and the general incremental
nonlinear optimization algorithm was previously introduced
in [17], this paper focuses on the SLAM application, making
the following contributions:
•
•
•
•
We present the iSAM2 algorithm based on the Bayes
tree data structure and tailored to SLAM applications.
We evaluate the effect of different variable ordering
strategies on efficiency.
We evaluate the effect of the relinearization and update
thresholds as a trade-off between speed and accuracy.
We present a detailed comparison with other state-ofthe-art SLAM algorithms in terms of computation and
accuracy.
reorders variables. This was made possible by combining
insights from both the fields of sparse linear algebra and
graphical models. iSAM2 also introduces incremental or
fluid relinearization, that selectively relinearizes variables
at every step as needed, completely eliminating the need
for periodic batch steps. iSAM2 is implemented using the
Bayes tree data structure [17], with incomplete Cholesky
factorization performed within each node of the tree.
III. P ROBLEM S TATEMENT
II. R ELATED W ORK
The first smoothing approach to the SLAM problem was
presented by Lu and Milios [18], where the estimation problem is formulated as a network of constraints between robot
poses, and this was first implemented using matrix inversion
[19]. A number of improved and numerically more stable
algorithms have since been developed, based on well known
iterative techniques such as relaxation [4], [20], [21], gradient descent [12], [22], preconditioned conjugate gradient
[23], multi-level relaxation [8], and belief propagation [11].
Olson et al. [9] applied Gauss-Seidel to a relative formulation
to avoid local minima in badly initialized problems that are
difficult for other solvers. A hierarchical extension by Grisetti
et al. [13] called TORO provides faster convergence by
significantly reducing the maximum path length between two
arbitrary nodes. However, the separation of translation and
rotation leads to inaccurate solutions [15] that are particularly
problematic for 3D applications.
More recently, some SLAM algorithms started to employ
direct solvers based on Cholesky or QR factorization. Frese’s
[10] Treemap performs QR factorization within nodes of a
tree, which is balanced over time. Sparsification prevents
the nodes from becoming too large, which introduces approximations by duplication of variables. Dellaert et al. [3]
presented Square Root SAM, which solves the estimation
problem by Cholesky factorization of the complete, naturally
sparse information matrix in every step using the LevenbergMarquardt algorithm. Ni et al. [24] presented Tectonic SAM
that divides the optimization problem into submaps while
still recovering the exact solution. Grisetti et al. [15] recently presented a hierarchical pose graph formulation using
Cholesky factorization that represents the problem at different levels of detail, which allows focusing on the affected
area at the most detailed level, while still propagating any
global effects at the coarser levels. Konolige et al. [16]
recently also presented a Cholesky based algorithm called
Sparse Pose Adjustment (SPA), which improves Square Root
SAM [3] by a continuable Levenberg-Marquardt algorithm
and a fast setup of the information matrix.
In [14] we introduced a more efficient version of Square
Root SAM called iSAM that incrementally updates a QR
matrix factorization using Givens rotations. iSAM avoids the
cost of batch factorization in every step, while still obtaining
the exact solution. To keep the solution efficient, periodic
batch steps are necessary for variable reordering, which
detracts from the online nature of the algorithm. In contrast,
the new iSAM2 algorithm presented here incrementally
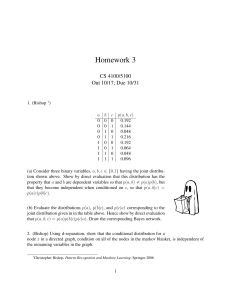
Fig. 2: Factor graph [25] formulation of the SLAM problem, where variable
nodes are shown as large circles, and factor nodes (measurements) with
small solid circles. This example illustrates both a loop closing constraint
c and landmark measurements m, in addition to odometry measurements
u and a prior p. Note that arbitrary cost functions can be represented, also
including more than two factors.
We use a factor graph [25] to represent the SLAM
problem in terms of graphical models. A factor graph is a
bipartite graph G = (F, Θ, E) with two node types: factor
nodes fi ∈ F and variable nodes θj ∈ Θ. Edges eij ∈ E are
always between factor nodes and variables nodes. A factor
graph G defines the factorization of a function f (Θ) as
Y
f (Θ) =
fi (Θi )
(1)
i
where Θi is the set of variables θj adjacent to the factor
fi , and independence relationships are encoded by the edges
eij : each factor fi is a function of the variables in Θi . An
example of a SLAM factor graph is shown in Fig. 2, where
the landmark measurements m, loop closing constraint c and
odometry measurements u are examples of factors. Note that
this formulation supports general probability distributions
or cost functions of any number of variables allowing the
inclusion of calibration parameters or spatial separators as
used in T-SAM [24] and cooperative mapping [26].
When assuming Gaussian measurement models
1
2
fi (Θi ) ∝ exp − khi (Θi ) − zi kΣi
(2)
2
as is standard in the SLAM literature, the factored objective function we want to minimize (1) corresponds to the
nonlinear least-squares criterion
1X
2
arg min (− log f (Θ)) = arg min
khi (Θi ) − zi kΣi
Θ
Θ 2
i
(3)
where hi (Θi ) is a measurement function and zi a mea2 ∆
surement, and kekΣ = eT Σ−1 e is defined as the squared
Mahalanobis distance with covariance matrix Σ.
In practice one always considers a linearized version
of problem (3). For nonlinear measurement functions hi
(2), nonlinear optimization methods such as Gauss-Newton
Alg. 1 General structure of the smoothing solution to SLAM with a direct
equation solver (Cholesky, QR). Steps 3-6 can optionally be iterated and/or
modified to implement the Levenberg-Marquardt algorithm.
Repeat for new measurements in each step:
1) Add new measurements.
2) Add and initialize new variables.
3) Linearize at current estimate Θ.
4) Factorize with QR or Cholesky.
5) Solve by backsubstitution to obtain ∆.
6) Obtain new estimate Θ0 = Θ ⊕ ∆.
iterations or the Levenberg-Marquardt algorithm solve a succession of linear approximations to (3) in order to approach
the minimum. At each iteration of the nonlinear solver, we
linearize around a linearization point Θ to get a new, linear
least-squares problem in ∆
arg min (− log f (∆)) = arg min kA∆ − bk
∆
∆
2
(4)
where A ∈ Rm×n is the measurement Jacobian consisting
of m measurement rows and ∆ is an n-dimensional tangent
vector [27]. This system can be solved based on the normal
equations AT A∆ = AT b by Cholesky factorization of
AT A = RT R, followed by forward and backsubstitution
on RT y = AT b and R∆ = y to first recover y, then
the actual solution ∆. Alternatively QR factorization yields
R∆ = d which can directly be solved by backsubstitution
(note that Q is not explicitly formed; instead b is modified
during factorization to obtain d, see [14]). Alg. 1 shows
a summary of the necessary steps to solve the smoothing
formulation of the SLAM problem with direct methods.
IV. T HE I SAM2 A LGORITHM
Our previous iSAM algorithm [14] reduces the complexity
of the batch solution to smoothing by incrementally updating
a matrix factorization. A batch solution performs unnecessary calculations, because it solves the complete problem
at every step, including all previous measurements. New
measurements often have only a local effect, leaving remote
parts of the map untouched. iSAM exploits that fact by
incrementally updating the square root information matrix
R with new measurements. The updates often only affect a
small part of the matrix, and are therefore much cheaper than
batch factorization. However, as new variables are appended,
the variable ordering is far from optimal, and fill-in soon
accumulates. iSAM therefore performs periodic batch steps,
in which the variables are reordered, and the complete matrix
is factorized again. Relinearization is also performed during
the periodic batch steps.
We have recently presented the Bayes tree data structure
[17], which maps the sparse linear algebra perspective onto
a graphical model view. Combining insights obtained from
both perspectives of the same problem led us to the development of a fully incremental nonlinear estimation algorithm
[17]. Here, we adapt this algorithm to better fit the SLAM
problem. The most important change is the combination of
the tree updates resulting from the linear update step and the
fluid relinearization.
Fig. 3: Connection between Bayes tree (left) and square root information
factor (right): Each clique of the tree contains the conditional probability
densities of its frontal variables. In square root information form these are
the same entries as in the corresponding matrix factor R.
Alg. 2 One step of the iSAM2 algorithm, following the general structure
of a smoothing solution given in Alg. 1.
In/out: Bayes tree T , nonlinear factors F , linearization point Θ, update ∆
In: new nonlinear factors F 0 , new variables Θ0
Initialization: T = ∅, Θ = ∅, F = ∅
1) Add any new factors F := F ∪ F 0 .
2) Initialize any new variables Θ0 and add Θ := Θ ∪ Θ0 .
3) Fluid relinearization with Alg. 5 yields affected variables J , see
Section IV-C.
4) Redo top of Bayes tree with Alg. 3.
5) Solve for delta ∆ with Alg. 4, see Section IV-B.
6) Current estimate given by Θ ⊕ ∆.
The Bayes tree encodes the clique structure of the chordal
graph that is generated by variable elimination [17]. The
nodes of the Bayes tree encode conditional probability distributions corresponding to the variables that are eliminated
in the clique. These conditionals directly correspond to rows
in a square root information matrix, as illustrated in Fig. 3.
The important difference to the matrix representation is that
it becomes obvious how to reorder variables in this Bayes
tree structure. For a sparse matrix data structure, in contrast,
this task is very difficult. An example of an actual Bayes tree
is shown in Fig. 1.
The iSAM2 algorithm is summarized in Alg. 2. Not all
details of the algorithm fit into the space of this paper;
instead we present the most important components and refer
the reader to our Bayes tree work [17]. Note that the iSAM2
algorithm is different from our original work: iSAM2 is more
efficient by combining the modifications of the Bayes tree
arising from both linear updates and fluid relinearization in
Alg. 3. In the following subsections we provide a summary
of important components of iSAM2, as well as a quantitative
analysis of their behavior in isolation.
Alg. 3 Updating the Bayes tree by recalculating all affected cliques. Note
that the algorithm differs from [17]: Update and relinearization are combined
for efficiency.
In: Bayes tree T , nonlinear factors F , affected variables J
Out: modified Bayes tree T ’
1) Remove top of Bayes tree, convert to a factor graph:
a) For each affected variable in J remove the corresponding
clique and all parents up to the root.
b) Store orphaned sub-trees Torph of removed cliques.
2) Relinearize all factors required to recreate top.
3) Add cached linear factors from orphans.
4) Re-order variables, see Section IV-A.
5) Eliminate the factor graph and create Bayes tree (for details see
Algs. 1 and 2 in [17]).
6) Insert the orphans Torph back into the new Bayes tree.
Naive approach
Constrained approach
250000
constrained
naive
batch
iSAM1
200000
150000
100000
50000
0
0
Num. variables affected
Choosing a good variable ordering is essential for the
efficiency of the sparse matrix solution, and this also holds
for the Bayes tree approach. In [17] we have described an
incremental variable ordering strategy that leads to better
performance than a naive incremental variable ordering, and
we perform a more detailed evaluation of its performance
here. An optimal ordering minimizes the fill-in, which refers
to additional entries in the square root information matrix
that are created during the elimination process. In the Bayes
tree, fill-in translates to larger clique sizes, and consequently
slower computations. While finding the variable ordering
that leads to the minimal fill-in is NP-hard [28] for general
problems, one typically uses heuristics such as the column
approximate minimum degree (COLAMD) algorithm by
Davis et al. [29], which provide close to optimal orderings
for many batch problems.
While performing incremental inference in the Bayes tree,
variables can be reordered at every incremental update,
eliminating the need for periodic batch reordering. This was
not understood in [14], because this is only obvious within
the graphical model framework, but not for matrices. The
affected part of the Bayes tree for which variables have
to be reordered is typically small, as new measurements
usually only affect a small subset of the overall state space
represented by the variables of the optimization problem.
To allow for faster updates in subsequent steps, our
proposed incremental variable ordering strategy forces the
most recently accessed variables to the end of the ordering.
The naive incremental approach applies COLAMD locally
to the subset of the tree that is being recalculated. In the
SLAM setting we can expect that a new set of measurements
connects to some of the recently observed variables, be
it landmarks that are still in range, or the previous robot
pose connected by an odometry measurement. The expected
cost of incorporating the new measurements, i.e. the size
of the affected sub-tree in the update, will be lower if
these variables are closer to the root. Applying COLAMD
locally does not take this consideration into account, but
only minimizes fill-in for the current step. We therefore
force the most recently accessed variables to the end of
the ordering using the constrained COLAMD (CCOLAMD)
ordering [29].
In Fig. 4 we compare our constrained solution to the naive
way of applying COLAMD. The top row of Fig. 4 shows
a color coded trajectory of the Manhattan simulated dataset
[9]. The robot starts in the center, traverses the loop counter
clockwise, and finally ends at the bottom left. The number of
affected variables significantly drops from the naive approach
(left) to the constrained approach (right), as red parts of
the trajectory (high cost) are replaced by green (low cost).
Particularly for the left part of the trajectory the number
of affected variables is much smaller than before, which
one would expect from a good ordering, as no large loops
are being closed in that area. The remaining red segments
coincide with the closing of the large loop in the right
Num. non-zero entries
A. Incremental Variable Ordering
400
350
300
250
200
150
100
50
0
500
1000
1500
2000
Time step
2500
3000
3500
3000
3500
constrained
naive
0
500
1000
1500
2000
Time step
2500
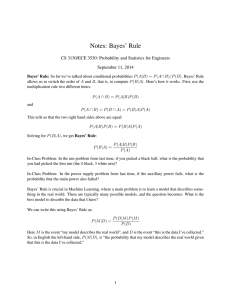
Fig. 4: Comparison of variable ordering strategies using the Manhattan
world simulated environment [9]. By color coding, the top row shows the
number of variables that are updated for every step along the trajectory.
Green corresponds to a low number of variables, red to a high number. The
naive approach of applying COLAMD to the affected variables in each step
shows a high overall cost. Forcing the most recently accessed variables to
the end of the ordering using constrained COLAMD [29] yields a significant
improvement in efficiency. The center plot shows the fill-in over time for
both strategies as well as the batch ordering and iSAM1. The bottom plot
clearly shows the improvement in efficiency achieved by the constrained
ordering by comparing the number of affected variables in each step.
part of the trajectory. The second row of Fig. 4 shows that
the constrained ordering causes a small increase in fill-in
compared to the naive approach, which itself is close to the
fill-in caused by the batch ordering. The bottom figure shows
that the number of affected variables steadily increases for
the naive approach, but often remains low for the constrained
version, though the spikes indicate that a better incremental
ordering strategy can likely be found for this problem.
B. Partial State Updates
Recovering a nearly exact solution in every step does not
require solving for all variables. New measurements often
have only a local effect, leaving spatially remote parts of the
estimate unchanged. We can therefore significantly reduce
the computational cost by only solving for variables that
actually change. Full backsubstitution starts at the root and
continues to all leaves, obtaining a delta vector ∆ that is used
to update the linearization point Θ. Updates to the Bayes tree
from new factors and from relinearization only affect the top
of the tree, however, changes in variable estimates occurring
here can propagate further down to all sub-trees.
iSAM2 starts by solving for all variables contained in
the modified top of the tree. As shown in Alg. 4, we then
continue processing all sub-trees, but stop when encountering
a clique that does not refer to any variable for which ∆
changed by more than a small threshold α. Note that the
0
Num affected variables
Diff. norm. chi-square
alpha=0.05
alpha=0.01
alpha=0.005
alpha=0.001
500
3500
3000
2500
2000
1500
1000
500
0
1000
1500
2000
Time step
2500
3000
3500
full backsub
alpha=0.005
alpha=0.05
0
500
1000
1500
2000
Time step
2500
3000
3500
Fig. 5: How the backsubstitution threshold α affects accuracy (top) and
computational cost (bottom) for the Manhattan dataset. For readability of
the top figure, the normalized χ2 value of the least-squares solution was
subtracted. A small threshold such as 0.005 yields a significant increase in
speed, while the accuracy is nearly unaffected.
Alg. 4 Partial state update: Solving the Bayes tree in the nonlinear case
returns an update ∆ to the current linearization point Θ.
In: Bayes tree T
Out: update ∆
Starting from the root clique Cr = Fr :
1) For current clique Ck = Fk : Sk
compute update ∆k of frontal variables Fk from the local conditional density P (Fk |Sk ).
2) For all variables ∆kj in ∆k that change by more than threshold α:
recursively process each descendant containing such a variable.
threshold refers to a change in the delta vector ∆, not the
absolute value of the recovered delta ∆ itself. The absolute
values of the entries in ∆ can be quite large, because, as
described below, the linearization point is only updated when
a larger threshold is reached. And to be exact, the different
units of variables have to be taken into account, but one
simple solution is to take the minimum over all thresholds.
For variables that are not reached, the previous estimate ∆
is kept. An nearly exact solution is obtained with significant
savings in computation time, as can be seen from Fig. 5.
C. Fluid Relinearization
The idea behind just-in-time or fluid relinearization is to
keep track of the validity of the linearization point for each
variable, and only relinearize when needed. This represents a
departure from the conventional linearize/solve approach that
currently represents the state of the art for direct equation
solvers. For a variable that is chosen to be relinearized,
all relevant information has to be removed from the Bayes
tree and replaced by relinearizing the corresponding original
nonlinear factors. For cliques that are re-eliminated we also
have to take into account any marginal factors that are passed
up from their sub-trees. We cache those marginal factors
during elimination, so that the process can be restarted from
the middle of the tree, rather than having to re-eliminate the
complete system.
Our fluid relinearization algorithm is shown in Alg. 5.
Note that because we combine the relinearization and update
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
-0.1
beta=0.5
beta=0.25
beta=0.1
beta=0.05
0
Num. aff. matrix entries
Diff. norm. chi-square
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0
-0.2
500
1000
1500
2000
Time step
2500
3000
3500
3000
3500
250000
full relin
beta=0.1
beta=0.25
200000
150000
100000
50000
0
0
500
1000
1500
2000
Time step
2500
Fig. 6: How the relinearization threshold β affects accuracy (top) and
computational cost (bottom) for the Manhattan dataset. For readability of
the top figure, the normalized χ2 value of the least-squares solution was
subtracted. A threshold of 0.1 has no notable effect on the accuracy, while
the cost savings are significant as can be seen in the number of affected
nonzero matrix entries. Note that the spikes extend beyond the curve for
full relinearization, because there is a small increase in fill-in over the batch
variable ordering (see Fig. 4).
Alg. 5 Fluid relinearization: The linearization points of select variables are
updated based on the current delta ∆.
In: linearization point Θ, delta ∆
Out: updated linearization point Θ, marked cliques M
1) Mark variables in ∆ above threshold β: J = {∆j ∈ ∆|∆j ≥ β}.
2) Update linearization point for marked variables: ΘJ := ΘJ ⊕ ∆J .
3) Mark all cliques M that involve marked variables ΘJ and all their
ancestors.
steps for efficiency, the actual changes in the Bayes tree are
performed later. The decision is based on the deviation of
the current estimate from the linearization point being larger
than a threshold β. For simplicity we again use the same
threshold for all variables, though that could be refined. A
nearly exact solution is provided for a threshold of 0.1, while
the computational cost is significantly reduced, as can be
seen from Fig. 6.
D. Complexity
In this section we provide some general complexity
bounds for iSAM2. The number of iterations needed to
converge is typically fairly small, in particular because of the
quadratic convergence properties of Gauss-Newton iterations
near the minimum. We assume here that the initialization of
variables is close enough to the global minimum to allow
convergence - that is a general requirement of any direct
solver method. For exploration tasks with a constant number
of constraints per pose, the complexity is O(1) as only a
constant number of variables at the top of the tree are affected
and have to be re-eliminated, and only a constant number
of variables are solved for. In the case of loop closures the
situation becomes more difficult, and the most general bound
is that for full factorization, O(n3 ), where n is the number
of variables (poses and landmarks if present). Under certain
assumptions that hold for many SLAM problems, batch
matrix factorization and backsubstitution can be performed
in O(n1.5 ) [30]. It is important to note that this bound does
not depend on the number of loop closings. Empirically,
complexity is usually much lower than these upper bounds
because most of the time only a small portion of the matrix
has to be refactorized in each step, as we show below.
V. C OMPARISON TO OTHER M ETHODS
We compare iSAM2 to other state-of-the-art SLAM algorithms, in particular the iSAM1 algorithm [14], HOGMan [15] and SPA [16]. We use a wide variety of simulated and real-world datasets shown in Fig. 7 that feature
different sizes and constraint densities, both pose-only and
including landmarks. All timing results are obtained on
a laptop with Intel Core 2 Duo 2.4 GHz processor. For
iSAM1 we use version 1.5 of the open source implementation available at http://people.csail.mit.edu/
kaess/isam. For HOG-Man, we use svn revision 14
available at http://openslam.org/. For SPA, we use
svn revision 32333 of ROS at http://www.ros.org/.
For iSAM2 we use a research C++ implementation running
single-threaded, using the CCOLAMD algorithm by Davis
et al. [29], with parameters α = 0.001 and β = 0.1
and relinearization every 10 steps. Source code for iSAM2
is available as part of the gtsam library at https://
collab.cc.gatech.edu/borg/gtsam/.
Comparing the computational cost of different algorithms
is not a simple task. Tight complexity bounds for SLAM
algorithms are often not available. Even if complexity bounds
are available, they are not necessarily suitable for comparison
because the involved constants can make a large difference
in practical applications. On the other hand, comparison of
the speed of implementations of the algorithms depends on
the implementation itself and any potential inefficiencies or
wrong choice of data structures. We will therefore discuss
not only the timing results obtained from the different
implementations, but also compare some measure of the
underlying cost, such as how many entries of the sparse
matrix have to be recalculated. That again on its own is also
not a perfect measure, as recalculating only parts of a matrix
might occur some overhead that cannot be avoided.
A. Timing
We compare execution speed of implementations of the
various algorithms on all datasets in Fig. 8, with detailed
results in Table I. The results show that a batch Cholesky
solution (SPA, SAM) quickly gets expensive, emphasizing
the need for incremental solutions.
iSAM1 performs very well on sparse datasets, such as
Manhattan and Killian, while performance degrades on
datasets with denser constraints (number of constraints at
least 5 times the number of poses), such as W10000 and
Intel, because of local fill-in between the periodic batch
reordering steps (see Fig. 4 center). An interesting question
to ask is how many constraints are actually needed to obtain
an accurate reconstruction, though this will be a function
of the quality of the measurements. Note that the spikes in
the iteration time plots are caused by the periodic variable
reordering every 100 steps, which equals to a batch Cholesky
factorization (SPA) with some overhead for the incremental
data structures.
The performance of HOG-Man is between SPA and
iSAM1 and 2 for most of the datasets, but performs better on
W10000 than any other algorithm. Performance is generally
better on larger datasets, where the advantages of hierarchical
operations dominate their overhead.
iSAM2 consistently performs better than SPA, and similar
to iSAM1. While iSAM2 saves computation over iSAM1
by only performing partial backsubstitution, the fluid relinearization adds complexity. Relinearization typically affects
many more variables than a linear update (compare Figs. 4
and 6), resulting in larger parts of the Bayes tree having to be
recalculated. Interesting is the fact that the spikes in iSAM2
timing follow SPA, but are higher by almost an order of
magnitude, which becomes evident in the per iteration time
plot. That difference can partially be explained by the fact
that SPA uses a well optimized library for Cholesky factorization (CHOLMOD), while for the algorithms underlying
iSAM2 no such library is available yet and we are using our
own research implementation.
B. Number of Affected Entries
We also provide a computation cost measure that is
more independent of specific implementations, based on the
number of variables affected, and the number of entries of
the sparse square root information matrix that are being
recalculated in each step. The bottom plots in Figs. 5 and
6 show the number of affected variables in backsubstitution
and the number of affected non-zero entries during matrix
factorization. The red curve shows the cost of iSAM2 for
thresholds that achieve an almost exact solution. When
compared to the batch solution shown in black, the data
clearly shows significant savings in computation of iSAM2
over Square Root SAM and SPA.
In iSAM2 the fill-in of the corresponding square root
information factor remains close to that of the batch solution
as shown in Fig. 4. The same figure also shows that for
iSAM1 the fill-in increases significantly between the periodic
batch steps, because variables are only reordered every 100
steps. This local fill-in explains the higher computational cost
on datasets with denser constraints, such as W10000. iSAM2
shows no significant local variations of fill-in owing to the
incremental variable ordering.
C. Accuracy
We now focus on the accuracy of the solution of each
SLAM algorithm. There are a variety of different ways to
evaluate accuracy. We choose the normalized χ2 measure that
quantifies the quality
fit. Normalized χ2 is
P of a least-squares
2
1
kh
(Θ
)
−
z
k
,
where
the numerator is
defined as m−n
i
i
i Λi
i
the weighted sum of squared errors of (3), m is the number
of measurements and n the number of degrees of freedom.
Normalized χ2 measures how well the constraints are satisfied, approaching 1 for a large number of measurements
sampled from a normal distribution.
City10000
W10000
Intel
Killian Court
Victoria Park
Fig. 7: Datasets used for the comparison, including simulated data (City10000, W10000), indoor laser range data (Killian, Intel) and outdoor laser range
data (Victoria Park). See Fig. 4 for the Manhattan sequence.
City10000
0
10
Iteration time (s)
10
10-2
Cumulative time (s)
iSAM1
iSAM2
SPA
HOG-Man
-1
-3
10
10-4
10-5
0
2000
4000
6000
8000
800
700
600
500
400
300
200
100
0
10000
iSAM1
iSAM2
SPA
HOG-Man
0
2000
4000
Time step
6000
8000
10000
6000
8000
10000
Time step
W10000
iSAM1
iSAM2
SPA
HOG-Man
100
-1
10
Cumulative time (s)
Iteration time (s)
101
10-2
10-3
10-4
10-5
0
2000
4000
6000
8000
1800
1600
1400
1200
1000
800
600
400
200
0
10000
iSAM1
iSAM2
SPA
HOG-Man
0
2000
4000
Time step
iSAM1
iSAM2
SPA
HOG-Man
0
500 1000 1500 2000 2500 3000 3500
Time step
Killian Court
14
12
10
8
6
4
2
0
iSAM1
iSAM2
SPA
HOG-Man
0
200
400
600
Time step
800
10
9
8
7
6
5
4
3
2
1
0
Victoria Park
Cumulative time (s)
Intel
Cumulative time (s)
70
60
50
40
30
20
10
0
Cumulative time (s)
Cumulative time (s)
Manhattan
Time step
iSAM1
iSAM2
SPA
HOG-Man
0
500
1000
Time step
1500
35
30
25
20
15
10
5
0
iSAM1
iSAM2
0
1000 2000 3000 4000 5000 6000 7000
Time step
Fig. 8: Timing comparison between the different algorithms for all datasets, see Fig. 7. The left column shows per iteration time and the right column
cumulative time. The bottom row shows cumulative time for the remaining datasets.
TABLE I: Runtime comparison for the different approaches (P: number of poses, M: number of measurements, L: number of landmarks). Listed are the
average time per step together with standard deviation and maximum in milliseconds, as well as the overall time in seconds (fastest result shown in red).
Dataset
City10000
W10000
Manhattan
Intel
Killian Court
Victoria Park
P
10000
10000
3500
910
1941
6969
Algorithm
M
L
20687
64311
5598
4453
2190
10608
151
iSAM2
avg/std/max [ms]
16.1 / 22.0 / 427
37.2 / 111 / 1550
3.46 / 12.8 / 217
2.59 / 2.81 / 13.8
0.56 / 1.25 / 20.6
3.91 / 13.4 / 527
time [s]
161
372
12.1
2.36
1.08
27.2
iSAM1
avg/std/max [ms]
17.5 / 22.2 / 349
56.5 / 86.6 / 1010
3.32 / 4.69 / 63.7
8.25 / 11.0 / 67.2
1.38 / 2.08 / 30.2
4.49 / 6.57 / 112
The results in Fig. 9 show that the iSAM2 solution is very
close to the ground truth given by batch (SAM or SPA).
Small deviations are caused by relinearizing only every 10
steps, which is a tradeoff with computational speed. iSAM1
shows a larger spike in error that is caused by relinearization
only being done only every 100 steps. HOG-Man is an
approximate algorithm exhibiting consistently larger errors,
even though visual inspection of the resulting map showed
only minor distortions. Accuracy improves for more dense
datasets, such as W10000, but is still not as good as iSAM2.
time [s]
175
565
11.6
7.50
2.67
31.3
HOG-Man
avg/std/max [ms]
time [s]
35.3 / 27.4 / 156
353
23.6 / 20.4 / 196
236
11.2 / 9.85 / 49.0
39.0
13.8 / 17.8 / 111
12.5
2.88 / 3.45 / 17.7
5.59
N/A
N/A
SPA
avg/std/max [ms]
78.1 / 67.4 / 245
161 / 108 / 483
17.9 / 12.7 / 52.2
6.70 / 5.16 / 19.4
4.86 / 3.01 / 11.1
N/A
[s]
781
1610
62.5
6.09
9.43
N/A
D. Beyond 2D
While we focused our evaluation in this paper on 2D
data, iSAM also correctly deals with 3D data, with the
first visual SLAM application of SAM shown in [3]. Overparametrization and singularities are handled using exponential maps of Lie groups [27]. Fig. 10 shows a 3D dataset
before and after incremental optimization. Note that a large
range of orientations is traversed, as the simulated robot is
always perpendicular to the surface of the sphere. For this
example, rotations are parametrized as Euler angles. While
Diff. norm. chi2
4.5
3.5
2.5
1.5
0.5
iSAM1
iSAM2
batch (SAM, SPA)
HOG-Man
0.2
0.1
0
1000
1500
2000
2500
Time step
3000
3500
Fig. 9: Step-wise quality comparison of the different algorithms for the
Manhattan world. For improved readability, the difference of normalized
χ2 from the least squares solution is shown.
Fig. 10: Simulated 3D dataset (sphere2500, included in iSAM1 distribution):
iSAM2 correctly deals with 6DOF using exponential maps of Lie groups.
(left) The noisy data for a simulated robot driving along the surface of a
sphere. (right) The sphere reconstructed by iSAM2. Note that the simulated
poses are always perpendicular to the surface of the sphere.
incremental updates in Euler parametrization are free of
singularities, absolute poses near singularities have explicitly
been avoided in this dataset.
VI. C ONCLUSION
We have presented iSAM2, a novel graph-based algorithm for efficient online mapping, based on the Bayes
tree representation in [17]. We described a modification to
make the algorithm better suited to SLAM. We performed
a systematic evaluation of iSAM2 and a comparison with
three other state-of-the-art SLAM algorithms. We expect our
novel graph-based algorithm to also allow for better insights
into the recovery of marginal covariances, as we believe that
simple recursive algorithms in terms of the Bayes tree are
formally equivalent to the dynamic programming methods
described in [1]. The graph-based structure is also suitable
for exploiting parallelization that is becoming available in
newer processors.
VII. ACKNOWLEDGMENTS
We thank E. Olson for the Manhattan dataset, E. Nebot and
H. Durrant-Whyte for the Victoria Park dataset, D. Haehnel
for the Intel dataset and G. Grisetti for the W10000 dataset.
R EFERENCES
[1] M. Kaess and F. Dellaert, “Covariance recovery from a square root
information matrix for data association,” Journal of Robotics and
Autonomous Systems, vol. 57, pp. 1198–1210, Dec 2009.
[2] F. Dellaert, “Square Root SAM: Simultaneous location and mapping
via square root information smoothing,” in Robotics: Science and
Systems (RSS), 2005.
[3] F. Dellaert and M. Kaess, “Square Root SAM: Simultaneous localization and mapping via square root information smoothing,” Intl. J. of
Robotics Research, vol. 25, pp. 1181–1203, Dec 2006.
[4] S. Thrun, W. Burgard, and D. Fox, Probabilistic Robotics. The MIT
press, Cambridge, MA, 2005.
[5] R. Hartley and A. Zisserman, Multiple View Geometry in Computer
Vision. Cambridge University Press, 2000.
[6] B. Triggs, P. McLauchlan, R. Hartley, and A. Fitzgibbon, “Bundle
adjustment – a modern synthesis,” in Vision Algorithms: Theory and
Practice (W. Triggs, A. Zisserman, and R. Szeliski, eds.), LNCS,
pp. 298–375, Springer Verlag, Sep 1999.
[7] S. Julier and J. Uhlmann, “A counter example to the theory of
simultaneous localization and map building,” in IEEE Intl. Conf. on
Robotics and Automation (ICRA), vol. 4, pp. 4238–4243, 2001.
[8] U. Frese, P. Larsson, and T. Duckett, “A multilevel relaxation algorithm for simultaneous localisation and mapping,” IEEE Trans.
Robotics, vol. 21, pp. 196–207, Apr 2005.
[9] E. Olson, J. Leonard, and S. Teller, “Fast iterative alignment of pose
graphs with poor initial estimates,” in IEEE Intl. Conf. on Robotics
and Automation (ICRA), May 2006.
[10] U. Frese, “Treemap: An O(log n) algorithm for indoor simultaneous localization and mapping,” Autonomous Robots, vol. 21, no. 2,
pp. 103–122, 2006.
[11] A. Ranganathan, M. Kaess, and F. Dellaert, “Loopy SAM,” in Intl.
Joint Conf. on AI (IJCAI), (Hyderabad, India), pp. 2191–2196, 2007.
[12] J. Folkesson and H. Christensen, “Closing the loop with Graphical
SLAM,” IEEE Trans. Robotics, vol. 23, pp. 731–741, Aug 2007.
[13] G. Grisetti, C. Stachniss, S. Grzonka, and W. Burgard, “A tree
parameterization for efficiently computing maximum likelihood maps
using gradient descent,” in Robotics: Science and Systems (RSS), 2007.
[14] M. Kaess, A. Ranganathan, and F. Dellaert, “iSAM: Incremental
smoothing and mapping,” IEEE Trans. Robotics, vol. 24, pp. 1365–
1378, Dec 2008.
[15] G. Grisetti, R. Kuemmerle, C. Stachniss, U. Frese, and C. Hertzberg,
“Hierarchical optimization on manifolds for online 2D and 3D mapping,” in IEEE Intl. Conf. on Robotics and Automation (ICRA),
(Anchorage, Alaska), May 2010.
[16] K. Konolige, G. Grisetti, R. Kuemmerle, W. Burgard, L. Benson, and
R. Vincent, “Sparse pose adjustment for 2D mapping,” in IEEE/RSJ
Intl. Conf. on Intelligent Robots and Systems (IROS), Oct 2010.
[17] M. Kaess, V. Ila, R. Roberts, and F. Dellaert, “The Bayes tree:
An algorithmic foundation for probabilistic robot mapping,” in Intl.
Workshop on the Algorithmic Foundations of Robotics, (Singapore),
pp. 157–173, Dec 2010.
[18] F. Lu and E. Milios, “Globally consistent range scan alignment for
environment mapping,” Autonomous Robots, pp. 333–349, Apr 1997.
[19] J.-S. Gutmann and B. Nebel, “Navigation mobiler roboter mit laserscans,” in Autonome Mobile Systeme, (Berlin), Springer Verlag, 1997.
[20] T. Duckett, S. Marsland, and J. Shapiro, “Fast, on-line learning of
globally consistent maps,” Autonomous Robots, vol. 12, no. 3, pp. 287–
300, 2002.
[21] M. Bosse, P. Newman, J. Leonard, and S. Teller, “Simultaneous
localization and map building in large-scale cyclic environments using
the Atlas framework,” Intl. J. of Robotics Research, vol. 23, pp. 1113–
1139, Dec 2004.
[22] J. Folkesson and H. Christensen, “Graphical SLAM - a self-correcting
map,” in IEEE Intl. Conf. on Robotics and Automation (ICRA), vol. 1,
pp. 383–390, 2004.
[23] K. Konolige, “Large-scale map-making,” in Proc. 21th AAAI National
Conference on AI, (San Jose, CA), 2004.
[24] K. Ni, D. Steedly, and F. Dellaert, “Tectonic SAM: Exact; out-ofcore; submap-based SLAM,” in IEEE Intl. Conf. on Robotics and
Automation (ICRA), (Rome; Italy), Apr 2007.
[25] F. Kschischang, B. Frey, and H.-A. Loeliger, “Factor graphs and the
sum-product algorithm,” IEEE Trans. Inf. Theory, vol. 47, Feb 2001.
[26] B. Kim, M. Kaess, L. Fletcher, J. Leonard, A. Bachrach, N. Roy,
and S. Teller, “Multiple relative pose graphs for robust cooperative
mapping,” in IEEE Intl. Conf. on Robotics and Automation (ICRA),
(Anchorage, Alaska), pp. 3185–3192, May 2010.
[27] B. Hall, Lie Groups, Lie Algebras, and Representations: An Elementary Introduction. Springer, 2000.
[28] S. Arnborg, D. Corneil, and A. Proskurowski, “Complexity of finding
embeddings in a k-tree,” SIAM J. on Algebraic and Discrete Methods,
vol. 8, pp. 277–284, Apr 1987.
[29] T. Davis, J. Gilbert, S. Larimore, and E. Ng, “A column approximate
minimum degree ordering algorithm,” ACM Trans. Math. Softw.,
vol. 30, no. 3, pp. 353–376, 2004.
[30] P. Krauthausen, F. Dellaert, and A. Kipp, “Exploiting locality by
nested dissection for square root smoothing and mapping,” in Robotics:
Science and Systems (RSS), 2006.