A Location-Aided Routing Protocol for Cognitive Radio Networks Moustafa Youssef
advertisement

A Location-Aided Routing Protocol for Cognitive
Radio Networks
Karim Habak, Mohammed Abdelatif, Hazem Hagrass and Karim Rizc
Moustafa Youssef
Department of Computer Science and Engineering
Egypt-Japan Univ. of Sc. and Tech. (E-JUST), Alexandria, Egypt
Emails: {karim.habak,abdollatif,hazem.hagrass,karim.rizc}@ejust.edu.eg
Wireless Research Center
Alexandria University and E-JUST, Egypt
moustafa.youssef@ejust.edu.eg
Abstract—Multi-hop cognitive radio networks (CRNs) are gaining interest recently in many practical applications. With location
information becoming more available, designing location-aware
routing protocols that fit the nature of CRNs becomes a necessity.
We present LAUNCH as a location-aided routing protocol for
CRNs that has a set of desirable properties: efficient use of the
common control channel, has a minimal route setup delay, prefers
stable routes, handles primary users heterogeneity, and handles
secondary users mobility.
LAUNCH is based on four main concepts: (1) a novel locationaware CRN routing metric that takes into account the PUs
activity; (2) distributed calculations at the neighbors; (3) a
channel locking mechanism to achieve the route stability and
minimize channel switching time; (4) an efficient route maintenance strategy. Evaluation of LAUNCH on the NS2 simulator
shows that its performance significantly outperforms the current
state-of-the-art CRNs routing protocols in terms of end-to-end
delay and packet loss rate. In addition, LAUNCH incurs a low
control overhead with a fast route establishment delay.
I. I NTRODUCTION
Cognitive Radio Networks (CRNs) have been proposed as a
means for increasing the utilization of licensed spectrum and
providing non-licensed users (i.e. secondary users (SUs)) with
opportunities to have access to bandwidth that is otherwise
unavailable. Recently, multi-hop CRNs have gained attention
as a way for providing new services such as cognitive wireless mesh networks [1] and cognitive radio adhoc networks
characterized by a completely self-configuring architecture
[2]. Designing efficient routing solutions for such networks
that minimize the control overhead on the common control
channel (CCC) used for synchronization and maximize the
network performance becomes a challenge. Current routing
protocols for CRNs can be classified, based on their network
state maintenance strategies, as limited scope or global [3].
The majority of protocols that maintain limited scope network
state exchange state information with a limited set of nodes
in an on-demand manner. These protocols usually employ
a form of on-demand route discovery procedure commonly
used in traditional adhoc networks. For example, [4], [5]
are based on modifications to the AODV routing protocol.
Consequently, the local state information is delivered to the
destination node when there is a demand for establishing a
new path. However, these systems usually require a large
number of control packets to reach the destination, as the
discovery packets are broadcast through the network, and
incur some delay in route establishment. Global network state
maintenance based protocols, e.g. [6], [7], propose to use a
link-state based routing protocol that floods the network with
messages as in traditional ad hoc networks. Such solutions
incur a high control overhead.
In this paper, we propose LAUNCH as a location-aided
routing protocol for CRNs where location information is used
to guide route discovery, maintenance, and data forwarding.
Packet forwarding decisions at a node are based on the
geographical position of the packets destination as well as the
positions of the nodes immediate neighbors. Therefore, there
is no need for discovering and maintaining explicit routes, reducing communication overhead and state information at each
node. Hence, location-aided routing protocols do scale well,
especially when the network is highly dynamic. Moreover,
many of todays wireless devices are location-enabled and this
is expected to become more ubiquitous in the future. Adding
to these advantages the fact that location information of CRN
nodes can be obtained via FCC Geolocation-Databases [8]
or estimated via measurements [9] accurately, these features
make location-aided protocols attractive for CRNs.
Although, location-aided routing has been previously investigated in the context of ad-hoc networks [10], applying it in
the context of CRNs has its own challenges, particularly the
heterogeneity of the network (having two classes of nodes:
PUs and SUs) with preferential treatment to PUs, optimizing
path selection based on the availability of multiple channels,
and the tight coupling between the routing and the spectrum
management functionalities at the PHY/MAC layers. The
closest work to ours in literature is SEARCH [11]. However,
it does not take the stochastic activity of PUs into account
which makes it select unstable routes at some points. In
addition, route selection is performed at the destination, which
introduces initial delay at route establishment.
Evaluation of LAUNCH on the NS2 simulator shows that in
typical operation scenarios of heterogeneous PUs and high
SUs mobility, its performance significantly outperforms the
current state-of-the-art CRNs routing protocols in terms of
end-to-end delay and packet loss rate. In addition, LAUNCH
incurs a very low control overhead and provides fast route
establishment.
The remainder of this paper is organized as follows. Section II
presents the details of LAUNCH. We evaluate LAUNCH
in Section III. Finally, Section IV concludes the paper and
provides directions for future work.
II. T HE LAUNCH P ROTOCOL
Compared to the current CRN routing protocols, LAUNCH
not only handles the PUs when they are active, but also
selects routes that are expected to be more stable, i.e. with
less PUs activity. This is inspired by the observation that a
CR user usually establishes a connection to the destination
and therefore, requires a stable route to this destination. So
even though a route may be currently promising, it may be
less attractive if it will be available for a short time due to the
PUs activity. Therefore, LAUNCH prefers stable routes over
short-lived ones. Similar to traditional location-aided routing
protocols, it performs greedy routing to the destination based
on its location. A node selects one of the direct neighbors
that are closer to the destination than itself to forward the
packet to. However, rather than selecting the node that is
closest to the destination, it selects the node that has a more
stable route to the destination, based on the PUs expected
activity and the available channels. LAUNCH has four main
salient features: (1) It uses a novel CRN and location-aware
routing metric that take into account the PUs activity; (2) It
performs distributed calculations at the neighbors, as compared
to centralized computation at the source node; (3) It relies on a
channel-locking mechanism to achieve the route stability and
minimize channel switching time; (4) It has an efficient route
maintenance strategy. We explain the details of the protocol
in the next subsections.
A. System Model
We consider a cognitive radio network that consists of a set of
static Primary Users (PUs), such as the case of white spacebased CRNs, that hold the right to use a licensed portion of
the spectrum and a set of Secondary Users (SUs) that may
access this licensed spectrum without affecting the operation
of the PUs. Since PUs own the rights to use the spectrum,
their operations must not be disturbed by the presence of SUs.
Hence, we model the transmission ranges of SUs as circles and
do not allow SUs in the “interference range” of a PU to operate
when the PU is active (i.e., interweave model). For modeling
the PUs’ activities, we adopt the commonly used two-state
ON-OFF birth-death process model, where the PU can either
be active (ON) or inactive (OFF). The length of the ON and
OFF periods follows two independent exponential distributions
with different parameters depending on the traffic of the PUs.
We also assume that the secondary user (SU) uses a CCC to
exchange routing parameters. The CCC can be implemented
either via a dedicated hardware, time-shared over the main
transceiver hardware, or through allocation of control time
slots or other in-band techniques. Two radios are used as data
transceivers (one for transmission and the other for reception)
which can be tuned to any channel of the licensed bands
(those on which PUs operate). In addition, each SU node is
capable of adapting the signal strength of its transmission to
the distance separating it and the receiver to further optimize
energy consumption. All SUs are assumed to be mobile. Each
SU knows its own location as well as the location of its
direct neighbors. In addition, it can know the location of
the destination SU it wants to communicate with. This last
information can be obtained through out-of-band means or
disseminated through the network. Finally, the number of PUs
in range can be estimated by a SU based on passive sensing.
Also their distribution parameters are assumed to be known
through estimation. Finally, We assume that PUs are stationary.
B. Routing Metric and Forwarding Strategy
Choosing a good routing metric is crucial for the performance
of a routing protocol. The routing metric is used to select one
of the neighbors in a greedy manner as a next hop for the
packet. Standard routing metrics for location-aided routing,
e.g. GPSR [12], use the distance between the neighbor and the
destination as a metric and select the neighbor that is closest
to the destination as a next hop. Although this reduces the
instantaneous end-to-end delay, it fails to capture the stability
of the route, which may introduce significant delays if a PU
along the path becomes active and requires a rerouting event.
Instead, LAUNCH uses a delay-based metric that selects the
neighbor that satisfies two conditions: 1) It is closer to the
destination than the current node (greedy forwarding criterion)
and 2) It has the lowest expected delay from the current node
based on route stability (minimum delay criterion).
The greedy forwarding criterion guarantees that we are always
getting closer to the destination. On the other hand, the
minimum delay criterion takes into account the stability of
the route by estimating the additional delay that will be
encountered if a PU becomes active and rerouting is needed.
More formally, consider two nodes Src and Dst. The proposed
metric estimates the delay (T ) between the two nodes as:
TP rop + TSwitchs
T =
1 − PActive
Where:
• TP rop : is the propagation time between the two nodes
which is calculated as the summation of the propagation time
between the current node and its neighbor plus the propagation
time between the neighbor and the destination. This can
be calculated from the nodes coordinates and represents the
greedy location based component of the routing decision, as
it depends on the geographic location of the nodes.
• TSwitch : is the channel switching time which is a function
of the difference of frequencies between the channels the
Src and Dst nodes are currently working on and the channel
which they will use. This term reflects the first component of
the CRNs nature which is the awareness of the presence of
multiple channels, and the ability to choose from them. As
we show later, the channel locking mechanism employed by
LAUNCH make this term typically zero, except for rerouting
events, reducing the switching time overhead significantly.
• PActive : is the probability that at least one PU that affects
the link between Src and Dst will become active during
a predefined time period τ . Higher values of parameter τ
represent higher path stability. Based on our system model,
since the PU is modeled as a two-state ON-OFF birth-death
process with parameters λi and µi representing the parameters
of the exponential distributions P
innthe ON and OFF periods
respectively, PActive = 1 − e−τ i=1 µi
SU2
SU2
PU
Src
SU2
PU
PU
RREQ
PU
PU
SU1
Dst
SU1
Src RCONF
Dst
Src
SU4
SU3
PU
PU
PU
RREP
SU1
PU
SU2
SU1
Src RACK
Dst
PU
PU
PU
SU4
SU4
SU4
SU3
SU3
Dst
SU3
(a) Node broadcasts RREQ to neigh- (b) Only neighbors closer to Dst reply (c) Node selects the best neighbor and (d) Selected neighbor locks channel
bors
with best/locked channel RREP)
sends CONF
and confirms RACK)
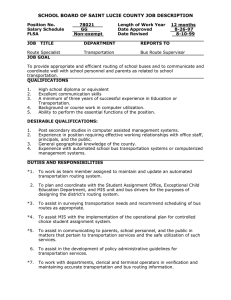
Fig. 1. Operation of LAUNCH’s locally-distributed locking-based route setup.
1) Route Setup: A node using a traditional multi-channel
routing protocol in CRNs selects the best outgoing route on
a per packet basis. Accordingly, a channel switch can occur
on a per packet basis which incurs channel switching delays
and reduces the route stability. In addition, it has a high
overhead over the CCC as nodes have to coordinate their
channel switching.
On contrast, LAUNCH makes each node work on only one
channel for sending and another for receiving with the ability
to change the channel as needed. This approach has the advantage of increasing the route stability, reducing computational
power, and reducing the channel switching time. In addition,
it reduces the overhead of route maintenance when rerouting
is required, as explained in Section II-B2. For this method,
route establishment can be locally distributed and follows the
following steps (Figure 1).
1) When a node wants to select one of its neighbors for
packet forwarding, it broadcasts to its first hop neighbors
an RREQ packet containing its ID, location, timestamp,
number of PUs that affect the communication of the
requesting node, and their distribution parameters which
are assumed to be known according the system model.
2) Each neighboring node, closer to the destination than the
requesting node, upon receipt of an RREQ packet, calculates the routing metric, based on its local information
including its own number of neighboring PUs, propagation delay and the minimum switching delay, and sends
back to the requesting node an RREP packet containing
the calculated metric and the preferred channel.
3) The requesting node waits for a certain time to collect
RREP packets and selects the neighbor with the best
metric as its next hop for this connection.
4) The requesting node sends a route confirm packet
(RCONF) to the selected neighbor.
5) Upon receipt of the RCONF packet, the neighboring
node locks the selected channel as its operating channel,
if no other node is using it, or increases its lock count.
It then transmits back a route acknowledgment packet
(RACK) confirming the path.
6) If two or more nodes start this process at the same
time on different channels, the node can send a negative
acknowledgment packet (RNACK) to deny the request
of some nodes. These nodes can select other nodes as
their next hop.
Note that once locked on a channel, the node can include
its transmission channel in the RREQ packet. Only neighbors
operating on this channel reply, further reducing the overall
consumed power in the network. Similarly, a locked neighbor
always reply with its locked channel, but with its current
calculated metric. Note that this makes the channel switching
time typically zero for the locking-based method for the majority of packets. The node only needs to calculate the channel
switching time on the event of re-routing. This leverages the
fact that neighboring nodes has similar channel conditions and
should operate on similar channels to minimize overhead.
All routes establishment are treated as soft state: a route
is allocated for a certain time parameter(δ). After this time,
unless the route is refreshed, the route is considered invalid.
This reduces the overhead in the route maintenance phase as
described in Section II-B2.
Upon route expiration, the node reduces the lock count for
this channel, declaring that the route is no longer valid.
When the lock count reaches zero, the node can change its
allocated channel. Small values of the parameter δ allow
for a shorter locking time and thus a node can change its
channel more frequently but at the expense of reducing route
stability and possibly increasing the CCC traffic. δ = 0
leads to the traditional routing per packet approach. routing
minimum (routing holes), such as perimeter forwarding [12],
when forwarding cannot be continued because there are no
neighboring nodes that are closer to the destination than the
sending node.
2) Route Maintenance: Route maintenance is initiated due to
PUs activity, node mobility, and/or node failure.
3) PU Avoidance: LAUNCH reduces the frequency of route
update events due to PUs activity by basing its routing metric
on route stability as discussed in Section II-B. In addition,
each node saves additional next hop information it receives
in the RREP packets. However, PUs becoming active on an
established route is inevitable due to the stochastic nature of
the PUs activities. When a PU becomes active, all SUs within
its transmission range and acting on the same channel become
inactive. The following procedure is activated:
• On such event, each affected node calculates the routing
metric for the different available channels and selects a channel
that has the best average metric for all connections passing
through it (based on nodes locations, channel switching time,
and current status of other PUs).
• Since all of these connections were using the same channel,
Parameter
Number of PUs
PU interference range (m)
µactive
µnormal
Number of SUs
SU transumption range (m)
Data rate (Kbps)
Number of active connections
Number of channels
Channel switching time (ms)
Frequency (GHz)
Effective bandwidth (Mbps)
Packet Size (KB)
Area size
τ (sec)
Maximum SUs speed(m/s)
Value range
0, 2, 4, 16
300
∈ Uniform[1, 3]
∈ Uniform([1, 3], [3, 5],
[5, 7], [7, 9], [9, 11])
100, 200, 300, 400
125
200
1, 2, 4, 8, 16
2
5
2.4
2
1.5
1000m×1000m
1
0, 2, 4, 6, 8
Nominal Value(s)
4
300
∈ Uniform[1, 3]
∈ Uniform[7, 9]
200
125
200
2
2
5
2.4
2
1.5
1000m×1000m
1
4
the affected node needs only to broadcast one packet (RUPDATE) containing the new available channel on the CCC.
Optionally, the affected node can include in the RUPDATE
packet the metric value for all the nodes using it.
• Upon reception of the RUPDATE packet, the sending node
can switch its channel to the new channel. If the routing metric
is not suitable for one node, it can start a new route discovery
process. Note that the node does not need to release the old
path as the soft state will expire in the forwarding node.
Note that using the proposed approach, only one packet is
needed to reestablish the new routes, reducing the overhead
on the nodes and on the CCC.
4) Node Mobility and Failure: Mobility of SUs leads to
breaking established routes. A node that becomes out of range
of its neighbors will be detected, e.g. by the link layer. In
this case, affected nodes can start a limited route discovery
starting from the affected node. Mobility models can be used
to estimate the movement of the node to start the rerouting
request before the path is completely broken, thus reducing
the disruption due to route breakage. Note that routes passing
through the mobile node will expire by themselves and thus
no actions need to be taken to remove them. Nodes failure can
be handled in the same way as node mobility.
III. P ERFORMANCE E VALUATION
In this section we evaluate the performance of LAUNCH via
NS2 simulations. We start by describing our experimental
setup followed by the results. We evaluate the effect of
changing the different parameters on LAUNCH and compare
it to well known CRN routing protocols protocols.
A. Experimental Setup
Table I summarizes the experimental parameters. We use the
multi-channel multi-radio extension to NS2 [13] and adopt the
PU ON-OFF model described in Section II-A where the means
of the exponentially distributed active and inactive periods are
randomly chosen (according to a uniform distribution). We
have two types of PUs that differ in the length of their activity
period: highly active (µactive ) and normal (µnormal). Both
have a 50% duty cycle. Primary users are distributed uniformally over the available channels. We model the transmission
Number Of routing packets
TABLE I
E XPERIMENTS PARAMETERS .
6000
CLCR
AODV
SEARCH
LAUNCH
5000
4000
3000
2000
1000
0
0
Fig. 2.
200
400
600
800
1000
1200
Number of SUs
Routing overhead of the different CRNs routing protocols.
range of SUs as circles of adaptive transmission power with a
maximum possible value of 125m. The interference range of
a PU is set to 300m. SUs in the interference range of a PU
are not allowed to operate (i.e., interweave model). The nodes
are initially placed uniformly at random then move according
to the random way point model. Each SU node is equipped
with three radio interfaces and have omni-directional antennas
and runs the IEEE 802.11 MAC protocol. The source and
destination of each connection are selected randomly.
Throughout our evaluation, we use the end to end delay, loss
ratio and control packet overhead as our main metrics.
B. Results
We compare LAUNCH to a reactive AODV-like algorithm
[14], a link-state based algorithm (CLCR [15]), and a locationaware CRN protocol (SEARCH [11]). Note that all these
protocols do not model the stochastic activity of the PUs into
account. SEARCH, however, avoids the area around the active
PUs.
1) Routing overhead: Figure 2 shows the effect of increasing
the number of SUs on the routing overhead. The figure
shows that LAUNCH and SEARCH, being location-based,
have the minimum overhead. The CLCR protocol, being linkstate based, periodically disseminates information about the
current routes throughout the network which incurs significant
overhead. This overloads the limited CCC and cannot react
quickly to PUs dynamics and SUs mobility. Therefore, for the
rest of this section, we focus on comparison with the reactive
based protocols (excluding CLCR).
2) Impact of SUs density: Figure 3 shows that with increasing the number of secondary users, the performance of all protocols enhances because they have more opportunities to select
routes. The slight performance advantage of AODV at a low
number of SUs can be explained by noting that there are two
factors that affect the performance of the routing protocols: the
optimality of the chosen routes and the reaction to the activity
of the PUs. For a low number of SUs, the number of routes
discovered by the greedy location- aided routing protocols are
limited, leading to a suboptimal performance compared to the
AODV protocol that selects the best routes. As the number
of SUs increases, the effect of reaction to the PUs activity
dominates and the relative advantage of AODV is reversed.
3) Impact of the number of PUs: Figure 4 shows that as the
number of PUs increases, the available capacity for SUs de-
0.15
0.1
0.05
3
2.5
2
1.5
1
0.5
400
0.2
0.15
0.1
0.05
0
2
500
0
4
8
3
4
16
(a) End-to-end delay
20
SEARCH
AODV
LAUNCH
Loss ratio (%)
1.5
1
0.5
5
6
7
8
9
10
15
10
5
0.2
0.1
1
2
3
4
5
6
7
8
Maximum node speed (m/s)
(a) End-to-end delay
1.5
SEARCH
AODV
LAUNCH
0.8
0.3
0
(a) End-to-end delay
1
SEARCH
AODV
LAUNCH
SEARCH
AODV
LAUNCH
0.4
0
Average µNormal
Number of PUs
(a) End-to-end delay
2
2
0.5
SEARCH
AODV
LAUNCH
SEARCH
AODV
LAUNCH
1.25
Loss ratio (%)
300
Number Of SUs
Loss ratio(%)
0.3
0.25
0
200
Loss ratio (%)
0
100
SEARCH
AODV
LAUNCH
3.5
End-to-End delay (sec)
0.2
End-to-End delay (sec)
4
SEARCH
AODV
LAUNCH
End-to-End delay (sec)
End-to-End delay (sec)
0.3
0.25
0.6
0.4
0.2
1
0.75
0.5
0.25
0
0
100
0
200
300
400
500
2
0
Number of SUs
(b) Loss ratio
Fig. 3. Impact of SUs density.
2
4
8
16
Number of PUs
3
4
5
6
7
8
9
10
IV. C ONCLUSION
We presented LAUNCH as a routing solution for CRNs that
uses the available location information and PUs’ stochastic activity to enhance the operation of CRNs. Similar to traditional
location-aided routing algorithms, LAUNCH performs greedy
routing to the destination based on its location. However, rather
than selecting the node that is closest to the destination, it
selects the node that has a more stable route to the destination,
based on the PUs’ expected activity and the available channels.
Compared to the current CRN routing protocols, LAUNCH not
only handles the PUs when they are active, but also selects
routes that are expected to be more stable.
We presented the details of LAUNCH and showed that the
developed routing metric provides a robust packet delivery
system with a low computational and network overhead and
small end-to-end delay. LAUNCH significantly outperforms
both traditional location-aware protocols and CRNs protocols
in typical network scenarios of heterogeneous PUs activity and
SU mobility.
Currently, we are expanding LAUNCH in multiple directions
including investigating other metrics that take into account the
1
2
3
4
5
6
7
8
Maximum node speed (m/s)
(b) Loss ratio
(b) Loss ratio
Fig. 4. Impact of the number of PUs. Fig. 5. Impact of PUs heterogeneity.
creases leading to degraded performance in terms of significant
delays and loss ratio. LAUNCH, modeling the PUs activities,
can maintain significant advantage over other protocols.
4) Impact of PUs heterogeneity: Figure 5 shows the effect of
PUs heterogeneity on performance. As µnormal increases, the
routes become more stable which enhances the performance
of all protocols. LAUNCH performance significantly increases
as it models the PUs stochastic activity. Similar to the analysis
of the SUs mobility effect, AODV has a slight advantage when
the network is more homogeneous in terms of the PUs activity
as route optimality dominates the performance in this case
rather than handling PUs activity.
5) Impact of SUs mobility: Figure 6 shows that increasing
the SUs mobility degrades the performance of all protocols.
LAUNCH, since it employers a local repair procedure, is less
affected by mobility compared to the other two protocols that
repair the route by contacting the destination.
0
0
Average µNormal
(b) Loss ratio
Fig. 6. Impact of SUs mobility.
channel and node load, and combining the ad-hoc and lockingbased techniques.
ACKNOWLEDGMENT
This work is supported in part by a grant from the Egyptian
National Telecommunications Regulatory Authority (NTRA).
R EFERENCES
[1] K. Chowdhury and I. Akyildiz, “Cognitive Wireless Mesh Networks
with Dynamic Spectrum Access,” IEEE Journal on Selected Areas in
Communications, vol. 26, no. 1, pp. 168–181, January 2008.
[2] I. Akyildiz, W.-Y. Lee, and K. Chowdhury, “CRAHNs: cognitive radio
ad hoc networks,” Ad Hoc Networks (Elsevier), 2009.
[3] M. Cesana, F. Cuomo, and E. Ekici, “Routing in Cognitive Radio
Networks: Challenges and Solutions,” Ad Hoc Networks (Elsevier),
2010, doi:10.1016/j.adhoc.2010.06.009 (Article in Press).
[4] G. Cheng, W. Liu, Y. Li, and W. Cheng, “Joint On-Demand Routing
and Spectrum Assignment in Cognitive Radio Networks,” Proceedings
of IEEE ICC 2007, June 2007.
[5] H. Ma, L. Zheng, X. Ma, and Y. luo, “Spectrum Aware Routing
for Multi-Hop Cognitive Radio Networks with a Single Transceiver,”
Proceedings of IEEE CrownCom 2008, 2008.
[6] H. Khalife, S. Ahuja, N. Malouch, and M. Krunz, “Probabilistic Path
Selection in Opportunistic Cognitive Radio Networks,” Proceedings of
IEEE GLOBECOM 2008, 2008.
[7] M. Pan, R. Huang, and Y. Fang, “Cost design for opportunistic multi-hop
routing in cognitive radio networks,” IEEE MILCOM, 2008.
[8] Federal Communications Commission, “FCC Adopted Rules for Unlicensed Use of Television White Spaces,” Tech. Rep. ET Docket No.
04-186, Second Report and Order and Memorandum Opinion and Order,
2004.
[9] M. Ibrahim and M. Youssef, “CellSense: A Probabilistic RSSI-based
GSM Positioning System,” Proceedings of IEEE Globecom, 2010.
[10] M. Mauve, A. Widmer, and H. Hartenstein, “A survey on position-based
routing in mobile ad hoc networks,” Network, IEEE, vol. 15, no. 6, pp.
30–39, 2001.
[11] K. Chowdhury and M. Felice, “Search: A routing protocol for mobile
cognitive radio ad-hoc networks,” Computer Communications, 2009.
[12] B. Karp and H. Kung, “GPSR: greedy perimeter stateless routing for
wireless networks,” in ACM MobiCom, 2000.
[13] “Cognitive
radio
extension.”
[Online].
Available:
http://stuweb.ee.mtu.edu/ ljialian/
[14] C. Perkins, E. Belding-Royer, S. Das et al., “Ad hoc on-demand distance
vector (aodv) routing,” 2003.
[15] C. Pyo and M. Hasegawa, “Minimum weight routing based on a
common link control radio for cognitive wireless ad hoc networks,” in
Proceedings of IWCMC. IEEE, 2007.