Model of the Evolution of Deformation Defects and Irreversible Strain... Thermal Cycling of Stressed TiNi Alloy Specimen
advertisement

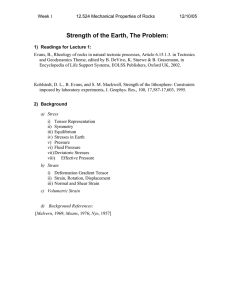
MATEC Web of Conferences 33 , 0 3 0 13 (2015) DOI: 10.1051/ m atec conf/ 201 5 33 0 3 0 13 C Owned by the authors, published by EDP Sciences, 2015 Model of the Evolution of Deformation Defects and Irreversible Strain at Thermal Cycling of Stressed TiNi Alloy Specimen 1a 1 1 Aleksandr E.Volkov , Fedor S.Belyaev , Margarita E.Evard , Natalia A.Volkova 1 1 Saint Petersburg State University, 198504 Saint Petersburg, Russia Abstract. This microstructural model deals with simulation both of the reversible and irreversible deformation of a shape memory alloy (SMA). The martensitic transformation and the irreversible deformation due to the plastic accommodation of martensite are considered on the microscopic level. The irreversible deformation is described from the standpoint of the plastic flow theory. Isotropic hardening and kinematic hardening are taken into account and are related to the densities of scattered and oriented deformation defects. It is supposed that the phase transformation and the micro plastic deformation are caused by the generalized thermodynamic forces, which are the derivatives of the Gibbs’ potential of the two-phase body. In terms of these forces conditions for the phase transformation and for the micro plastic deformation on the micro level are formulated. The macro deformation of the representative volume of the polycrystal is calculated by averaging of the micro strains related to the evolution of the martensite Bain’s variants in each grain comprising this volume. The proposed model allowed simulating the evolution of the reversible and of the irreversible strains of a stressed SMA specimen under thermal cycles. The results show a good qualitative agreement with available experimental data. Specifically, it is shown that the model can describe a rather big irreversible strain in the first thermocycle and its fast decrease with the number of cycles. 1 Introduction Operational integrity of actuators, sensors, vibration isolators based on the use of shape memory alloys (SMA) substantially depends on the irreversible shape change, which develops at repeated thermocycling of an SMA part subject to the action of external forces. Thus, calculation of the irreversible deformation is a challenge for any theoretical model aimed at the simulation of the SMA mechanical behavior. A suitable approach can be microstructural modeling since it is based on the account of the alloy structure and of the deformation mechanisms. Probably the first attempt to develop such a model was the work of Q. Sun and C. Lexcellent [1] who introduced special internal variables to specify the measures of the plastic deformation. Similar internal variables were used in [2, 3]. In these works it was shown that such approach could describe an incomplete strain recovery on heating. It also naturally explained the relation between the unrecovered strain and the two-way shape memory effect. In works [4, 5] a further step was done. Microplastic deformation was calculated alongside with the densities of the scattered and oriented deformation defects, the isotropic and kinematic hardening being related with these densities. In the present work a more accurate account of the oriented defects is done. The density of these defects is considered to be a state variable, characterizing the elastic energy of the inter-phase stresses, rather than the irreversible deformation. The a developed model is applied for simulating the variation of the irreversible deformation on thermocling under different stresses acting on heating and cooling. 2 Model This microstructural model uses the approximation of the small-strain theory. The representative volume is considered to consist of grains characterized by the orientation Z of the crystallographic axes. Inside each grain coexist the austenite and martenside, which in turn is composed of domains belonging to one of the N crystallographically equivalent orientations. 2.1 Averaging of microstrains Reuss’ hypothesis is used for calculation of the strain tensor H of the representative volume by neutralization of the strains of grains belonging to this volume: = 6 ( ), (1) where fi and Hgr(Zi) are the volume fraction and the strain of a grain with the orientation of the crystallographic axes Zi and the sum is taken over all grains. A grain strain Hgr is considered as the sum of elastic Hgr e, thermal Hgr T, phase Hgr Ph and micro plastic Hgr MP components: = + + + (2) Corresponding author: author@e-mail.org This is an Open Access article distributed under the terms of the Creative Commons Attribution License 4.0, which permits XQUHVWULFWHGXVH distribution, and reproduction in any medium, provided the original work is properly cited. Article available at http://www.matec-conferences.org or http://dx.doi.org/10.1051/matecconf/20153303013 MATEC Web of Conferences Also within the Reuss’ hypothesis, we calculate the elastic strain of a grain by the “mixture rule”: = (1 ) + (3) where N is the number of Bain’s orientation variants, (1/N))n is the volume fraction of the n-th variant of is the total volume fraction martensite, = of martensite in a grain. Elastic strains of austenite HA e and of the n-th variant of martensite HMn e are calculated by the Hook’s law. Thermal strain Hgr T is calculated in a similar way with the use of isotropic expansion law for thermal strains of the two phases. The phase strain of a martensite variant is the Bain’s deformation Dn realizing the transformation of the lattice and (1/N))n is the weight of the n-th variant in the total phase strain. Thus, = (4) Micro plastic strains are caused by the incompatibility of the phase strains. The main assumption for its calculation is that the phase strain of a Bain’s variant activates a combination of slips producing a strain proportional to the deviator of the phase strain. Thus, for the total micro plastic strain of a grain one can write: = N dev (5) where internal variables Hnp are measures of the microplastic strains, devDn is the deviator part of tensor Dn, N is a material constant. (hereinafter Ms, Mf, As, Af are the characteristic temperatures and q0 is the latent heat of the transformation). As for the elastic inter-phase stress energy Gmix, it grows with the martensite variants fractions )n and it is decreased by oriented defects bn, produced by micro plastic deformations Hnp. In the works [7, 8] the authors considered martensite variants originated by an invariant plane deformation and characterized by the habit plane and the amount of shear. They suggested to calculate the energy of the variants interaction by a quadratic form. In the present work the same assumption is used for the interaction energy of the Bain’s variants of martensite: = 5, 45 (5 65 )( 6 ), * in which the diagonal components of matrix Amn describe the self-action and the off-diagonal elements – the interaction of the martensite variants. In TiNi alloy the basic self-accommodation of martensite is realized by grouping of the variants into correspondence variants pairs (CVP) [9-12]. We account for this fact by using the proper numeration of the variants and taking the matrix Amn in the form: A=P 7 (6) where GA and GMn are the eigen potentials of austenite and n-th variant of martensite (potentials of the phases as if they were not interacting), Gmix is the potential of mixing, which is the elastic inter-phase stress energy. In formula (6) the eigen potentials are: = ( ) * -/0 .- ./0 , # ($%$ )' !" & *$& 2 = A, M3, - ().- (7) superscript ъ $ stands for austenite and ъ Mn – for the n-th variant of martensite; T0 is the phase equilibrium temperature (i.e. such temperature, at which GA = GMn); G0a and S0a (ъ A, Mn) are the Gibbs’ potentials and the entropies at stress V=0 and temperature T=T0; Hij0Ta (ъ A, Mn) are strains of the phases at V=0; cVa and Daijkl (ъ A, Mn) are the specific heat capacities at constant stress and the elastic compliances. For T0 we use an estimate proposed R.J. Salzbrenner, M. Cohen [6]: T0 = (Ms+Af)/2 A1 8; A1 where the material constant D accounts for the interaction of the variants in a CVP, and P=q0((Mf–Ms)/T0) / (1–2D). The thermodynamic force causing growth of the n-th variant of martensite (i.e. increase of the variable bn) is: 2.2 Transformation conditions = (1 ) ) + + , 1 -: -: 0 -: 1 0 -:8 A1 = 7 -: 0 1 -: 0 -: -: 1 A1 > = ? To formulate the evolution equations for the variables )n and Hnp we consider generalized forces conjugated with these parameters. We start from the Gibbs’ potential of the two-phase grain: (8) B C& $& @ @ ( ) + D- - E 5 45 (F5 65 ) (9) There exists a dissipative force opposing the movement of the phase boundary and responsible for the thermal hysteresis of the transformation. Denoting this force by Ffr, we formulate the transformation condition: Fn = rFfr, (10) where the plus sign is for the direct and minus – for the reverse transformation. The value of Ffr is derived from the transformation characteristics: Ffr =q0(Ms–T0)/T0. 2.3 Martensite reorientation A special approach is used to describe the reorientation (twinning) of martensite. This process is interpreted as a shift in the space of internal variables )1,…,)N , such is that the total amount of martensite = constant. We accept the following hypotheses. 1. Reorientation of martensite in a grain can occur only if this grain is purely martensitic ()gr = 1). This hypothesis may seem too restrictive. Still, since reorientation requires a bigger stress than stress-induced transformation, it must become the dominating 03013-p.2 ESOMAT 2015 mechanism of deformation only when the direct transformation is completed. 2. Any variant of martensite can be transformed in any other variant. 3. Reorientation occurs along the direction in the space )1,…,)N , which corresponds to the fastest decrease of the Gibbs’ potential. 4. Reorientation starts when the thermodynamic force reaches some critical value. To find the direction of the reorientation we use HI HI vector > = G ,…, N and take its projection L HJK where * is a material constant. First of the equations (16) reflect the fact that oriented defects grow in a proportional way with the micro plastic deformation, this growth being limited by escape to the outer surface. The second equation (16) means that scattered defects are proportional to the summary plastic deformation (Odquist parameter). We assume that the scattered defects give rise to the isotropic hardening of the material and the oriented ones – to the kinematic hardening: we relate the defect densities fn and bn to Fny and FnU by the so called closing equations, which we choose in the simplest linear form: HJL onto plane )1+…+)N =const. Then if for some n it holds that )n = 0 and Ln<0 we substitute L for its projection Lc onto intersection of planes )n = 0 and )1+…+)N =const repeating this procedure for other components of Ln if necessary. Finally we obtain the unit direction l, which does not lead to a violation of conditions )n>0, n=1,…,N. For this direction we postulate the condition of reorientation: > OP (Q) = > R OP (11) Y Z > = 2Y , > = 2Z 6 , (17) where ay and aU are material constants. From conditions (10) and (14) in the case of the transformation or (11) and (14) in the case of martensite reorientation using formulae (9), (12), (13), (15) – (17) evolution equations relating the increments of the internal variables )n, bn, fn and to the increments of stress and temperature are derived. Formulae (1) – (5) allow calculating the reversible and irreversible macroscopic strain. where > OP (Q) = HI H0 = Q HI H)L = ? Q > 3 Simulation results (12) fr tw In (11) F is a constant, characterizing the critical force for reorientation. From hypotheses 2 and 3 it follows that the increments d)n are proportional to ln : d)n = ln dM, (13) The values of the material constants specifying the elastic, thermal and phase deformation of SMA were chosen to reproduce the mechanical behavior of the equiatomic TiNi SMA. For a specific TiNi composition experimentally studied in [13] they were determined in calorimetric and mechanical tests. The values of all constants are collected in Table 1. where dM is the proportionality factor to be found from condition (11). 2.4 Micro plastic flow conditions Conditions (10) or (11) are insufficient for determination of the increments of all internal variables. To find the variation law of variables bn we formulate the microplastic flow conditions: _Fnp – FnU_ = Fny, d_Fnp_> 0, (14) where Fnp is the generalized force conjugated with the parameters bn : HI > = ? S HJL = E 5 45 (5 6 ), UV |6 |HT W(6 HT ), Material constant Value Characteristic temperatures Mf, Ms, As, Af 317, 326, 397, 406 K Latent heat q0 -160 MJ/m3 Number of martensite variants N 12 Lattice deformation matrix D [14] (15) Fny and FnU are the forces describing the isotropic and kinematic hardening. Note that the micro-plastic flow condition (14) is analogous to the classic plastic flow condition for 1D case, forces Fnp playing the role of the stress and Fny, FnU – the roles of the flow stress and the back stress respectively. Deformation defects generated by the micro plastic flow we divide in two groups: oriented defects bn and scattered defects fn, suggesting the evolution equations for them in the form: 6T = HT Table 1. Values of the material constants. T = |HT | (16) 0.0188 0.0562 0.0488 [0.0562 0.0188 0.0488 c 0.0488 0.0488 0.0369 Elastic modulus austenite EA of 80 GPa Elastic modulus martensite EM of 25 GPa Poisson’s ratio austenite QA of 0.33 Poisson’s ratio martensite QM of 0.45 Thermal-expansion 03013-p.3 1110-6 K-1 MATEC Web of Conferences b) coefficient of austenite Thermal-expansion coefficient of martensite 6.610-6 K-1 Variants constant D 0.2 Critical reorientation force Ffr tw 20 MJ/m3 Micro plastic scaling factor N 1.9 strain irrreversible strain, % interaction 10 hardening 0.2 MPa Kinematic factor aU hardening 5 MPa Oriented defects saturation factor * 4 2 0 10 20 number of cycle 30 Figure 2. Simulated and experimental [13] dependences of the irreversible strain increment in one thermocycle under stress 50 MPa (a) and 200 MPa (b) on the cycle number. 2.2 Figures 1 – 4 present the results of simulation of the strain variation at thermocycling under a constant stress. 7 6 5 strain, % 6 0 Isotropic factor ay simulation experiment 8 4 3 2 The irreversible strain in one cycle decreases with the number of cycles tending to some small value. The results of simulation well agree with the experiment for stress 200 MPa. Not so good agreement for stress 50 MPa shows that some relaxation process reducing the deformation hardening are not taken into account. Active SMA parts in actuators usually experience thermomechanical cycles in which the stress on heating Vh is set commonly at bigger values than the stress on cooling Vc. Naturally, the irreversible strain grows with the applied stress. An example of the simulation of the dependence of irreversible strain on the stress Vh is shown in Figure 3. 0 300 350 400 450 500 temperature, K irrreversible strain, % 1 550 Figure 1. Simulated strain variation at thermocycling under a constant stress 50 MPa. 4 2 0 a) -200 -100 0 100 200 300 400 stress at heating, MPa Figure 3. Dependence of the irreversible strain in the first thermocycle on the stress applied at heating. Stress at cooling is 50 MPa (simulation). Note that the irreversible strain grows with Vh faster after it has exceeded some critical value. An analysis shows that this acceleration is related to the activation of the martensite reorientation when the force needed for it reaches the critical value. Figure 4 presents the strain variation in the course of three thermocycles with Vc = 50 MPa, Vh = 200 MPa. 03013-p.4 ESOMAT 2015 Simulation predicts that the total irreversible strain growth must be influenced stronger by the stress applied on cooling than on heating. 12 strain, % 10 8 Acknowledgements 6 This research was supported by the grant of Russian Foundation of Basic Research 15-01-07657. One of the authors (A.E. Volkov) acknowledges SaintPetersburg State University (Russia) support of presenting this work at the conference ESOMAT-2015 (project 6.41.647.2015). 4 2 0 300 350 400 450 500 temperature, K 550 References One can see a typical “hump” on the strain dependence on temperature while heating. It is related to the reorientation of martensite occurring along the sequence “martensite – virtual austenite – martensite of other orientation” prior to the start of the reverse transformation. Figure 5 shows the growth of the total irreversible strain on thermocycing. The irreversible strain after 30 cycles under Vc=50 MPa, Vh= 200 MPa is only two times larger than after 30 cycles under Vc=Vh= 50 MPa. At the same time cycling under Vc=Vh= 200 MPa results in a much bigger growth of the irreversible strain. 2. accumulated irrreversible strain, % Figure 4. Strain variation under thermocycling at stress on cooling Vc=50 MPa and stress on heating Vh= 200 MPa (simulation). 1. 3. 4. 5. 6. 7. 40 8. 30 Vc = 200 MPa, Vh = 200 MPa Vc = 50 MPa, Vh = 50 MPa Vc = 50 MPa, Vh = 200 MPa 20 9. 10. 10 0 11. 0 10 20 number of cycle 12. 30 Figure 5. Dependence of the total accumulated irreversible strain on the number of thermocycles carried out under different stresses Vc applied on cooling and Vh applied on heating (simulation). 13. 14. Summary Incorporation of the deformation defects conception into a microstructural model opens the possibility of simulating the irreversible strain acquired by an SMA specimen at thermomechanical cyclic loading under different stresses applied on the stages of cooling and heating. An account of the deformation defects production and of their effect on the isotropic and kinematic hardening allows describing the decrease of the irreversible strain in one cycle with the cycle number. This data is important for designing of SMA actuators. 03013-p.5 Q.-P. Sun, C. Lexcellent, J. de Physique IV. 6 (1996), C1-367-375. M.E. Evard 121, A.E. Volkov, J. Eng. Mater. and Technol. (1999), 102–104. A.E. Volkov, F. Casciati, in: F.Auricchio, L.Faravelli, G.Magonette and V.Torra (Eds.) Shape Memory Alloys. Advances in Modelling and Applications, Barcelona, 88-104 (2001). F.S. Belyaev, M.E.Evard, A.E. Volkov, N.A. Volkova, Materials Today Proceedings. (to be published) A.E. Volkov, M.E. Evard, F.S. Belyaev, Materials Science Foundations, 81-82 (2015), 20-37. R.J. Salzbrenner, M. Cohen, Acta Met., 27, N 5 (1979), 739–748. N. Siredey, E. Patoor, M. Berveiller, A. Eberhardt, Int. J. of Solids and Structures 36 (1999), 4289-4315. Y. Chemisky, A. Duval, E. Patoor, T. Ben Zineb, Mechanics of Materials 43 (2011) 361–376. K. Madangopal, J. Singh, Benerjee, Scr. Met., 25, 2153–2158 (1991). K. Madangopal, J. Singh, Acta Mater., 48 (2000), 1325-1344. M. Nishida, T. Nishiura, H. Kawano, T. Imamura, Phil. Mag., 92 (2012), 2215–2233. M. Nishida, E. Okunishi, T. Nishiura, H. Kawano, T. Imamura, S. Ii, T. Hara, Phil. Mag., 92 (2012), 2234–2246.K.M. Knowles, D.A. Smith, Acta Met., 20, 101–110 (1981). S. Belyaev, N. Resnina, A. Sibirev, J. Mater. Eng. Perform., 23 2339–2342 (2014). T. Imamura, T. Nishiura, H. Kawano, H. Hosoda, M. Nishida, Phil. Mag., 92 (2012), 2247–2263.