Physics-Based Reinforcement Learning for Mobile Manipulation
advertisement

Physics-Based Reinforcement
Learning for Mobile Manipulation
PhD Dissertation Defense
Jonathan Scholz
August 17, 2015
Committee:
Dr. Charles Isbell (IC, Georgia Institute of Technology)
Dr. Andrea Thomaz (IC, Georgia Institute of Technology)
Dr. Henrik Christensen (IC, Georgia Institute of Technology)
Dr. Magnus Egerstedt (ECE, Georgia Institute of Technology)
Dr. Michael Littman (CS, Brown University)
Thesis Vision
Robots operating in human environments
Learning behaviors from experience
Good Ideas
•
Self-guided
exploration
•
Shaping behavior
through feedback
Reinforcement Learning
Action at
Agent, State st
World
Reward rt
Next State st+1
➡
➡
➡
Pacman states: all positions of pacman, ghosts, food, & pellets
Pacman actions: {N,S,E,W}
Pacman rewards: -1 per step, +10 food, -500 die,+500 win,...
RL+Robotics: Prior work
16
•
•
•
Learning to Control a Low-Cost Manipulator us
Humanoid Walking
(Peters, Schaal, Vijayakumar 2003) Data-Efficient Reinforcement Learning
Acrobatic Helicopter
(Ng et al. 2003)
Marc Peter Deisenroth
Carl Edward Rasmussen
Dept. of Computer Science & Engineering
University of Washington
Seattle, WA, USA
Dept. of Engineering
University of Cambridge
Cambridge, UK
Dieter Fox
Dept. of Computer Science & Engine
University of Washington
Seattle, WA, USA
Fig. 3. Episodic natural actor-critic for learning dynamic movement primitives. (a)
Learning curves comparing the episodic Natural Actor Critic to episodic REINFORCE.
(b) Humanoid robot DB which was used for this task. Note that the variance of the
episodic Natural Actor Critic learning is significantly lower than the one of episodic
REINFORCE, with about 10 times faster convergence.
Abstract—Over the last years,
there has been substantial
Ball-in-Cup
progress in robust manipulation in unstructured environments.
long-term goal of our work is to get away from precise,
(Kolber 4.2
& Peters
2009) The
Example II: Optimizing Nonlinear
Motor
Primitives
for
but very
expensive
robotic
systems and to develop affordable,
Humanoid Motion Planningpotentially
imprecise, self-adaptive manipulator systems that can
interactively
perform
tasks such
as playing with children. In
While the previous example demonstrated
the feasibility
and performance
of
the Natural Actor Critic in a classicalthis
example
of
motor
control,
this
section
will
paper, we demonstrate how a low-cost off-the-shelf robotic
turn towards an application of optimizing nonlinear dynamic motor primitives
system
can learn closed-loop policies for a stacking task in only
for a humanoid robot. In [17, 16], a novel form of representing movement plans
a handful
of trials—from
scratch.
Our manipulator is inaccurate
(q d , q̇ d ) for the degrees of freedom (DOF)
of a robotic
system was suggested
in
and provides
no pose feedback. For learning a controller in the
terms of the time evolution of the nonlinear
dynamical systems
work space of a Kinect-style depth camera, we use a model-based
q̇d,k = h(qd,k , z k , gk , ⌧, ✓k )
(30)
reinforcement learning technique. Our learning method is data
where (qd,k , q̇d,k ) denote the desiredefficient,
position and
velocity model
of a joint,
z k and
the deals with several noise sources
reduces
bias,
internal state of the dynamic system,ingk atheprincipled
goal (or pointway
attractor)
state
of
during long-term
planning. We present a
each DOF, ⌧ the movement duration shared by all DOFs, and ✓k the open
way of
state-space
constraints into the learning
parameters of the function h. The original
workincorporating
in [17, 16] demonstrated
how
and analyze
thebylearning
the parameters ✓k can be learned to process
match a template
trajectory
means of gain by exploiting the sequential
supervised learning – this scenario is,structure
for instance,of
useful
as
the
first
step
of an
the stacking task.
Fig. 1. Low-cost robotic arm by Lynxmotion [1] performing a blo
task. Since the manipulator does not provide any pose feedback,
learns a controller directly in the task space using visual feedba
Kinect-style depth camera.
progress in
robust manipulation in unstructured environments. While existing techniques have the potential to solve various household
manipulation tasks, they typically rely on extremely expensive
robot hardware [12]. The long-term goal of our work is to
develop affordable, light-weight manipulator systems that can
interactively play with children. A key problem of cheap
a typical problem of model-based methods: P ILCO
a flexible probabilistic non-parametric Gaussian proc
dynamics model and takes model uncertainty con
into account during long-term planning. P ILCO lea
controllers from scratch, i.e., with random initializa
deep understanding of the system is required. In this p
show how obstacle information provided by the dept
can be incorporated into PILCO’s planning and lea
•
PILCO: Cart-Pole
(Diesenroth et al. 2011)
•
PILCO: Block-Stacking
(Diesenroth et al. 2011)
imitation learning system. Here we will add the ability of self-improvement of
the movement primitives in Eq.(30) by means of reinforcement learning,
which
I. I NTRODUCTION
is the crucial second step in imitation learning.
The system in Eq.(30) is a point-to-point
an episodic
Overmovement,
the lasti.e.,years,
theretaskhas been substantial
from the view of reinforcement learning – continuous (e.g., periodic) movement
3 71
0 7 A90 7
08
Not achieved
using RL methods
Limitations
Feedback
k
s
a
T
??
??
??
??
r
o
t
o
m
i
r
o
s
Sen
Decisions
Sensorimotor Level
What we see
What the robot sees
Pixel Intensities
2,073,618 Dimensional Time-Series!
Joint Currents
}
What the robot does
Physical Object Level
What we see
What the robot sees
Square Table Pose
Rectangular Table Pose
}
}
It is hard to imagine a truly intelligent agent that
does not conceive of the world in terms of objects
Net Applied Force-Torque (Square Table)
and their properties and relations to other objects.
- Leslie Kaelbling, 2001
9 Dimensional Time-Series
Reinforcement Learning
Method Comparison
Policy
Model
Horizon
Problem Space
Algorithm
Data
Ball in Cup
DMP
None
Short
Robot-Space
EM w/ Natural
Gradient
Autonomous
Humanoid Walking
RBF
None
Short
Robot-Space
LSTD w/ Natural
Gradient
Autonomous
Helicopter
Neural-Net
Locally Weighted
Regression
RBF
PILCO Cart-Pole
PILCO BlockStacking
Robotics
Cart Pushing
Domain General
Short
Robot-Space
Hill-Climbing w/
Monte-Carlo Eval.
LfD
Gaussian Process
Short
Robot-Space
CG/L-BFGS
Autonomous
Linear
Gaussian Process
Short
Mixed
CG/L-BFGS
Autonomous
Policy
Model
Horizon
Problem Space
Algorithm
Data
Long
Task-Space
A* Variant
N/A
Long
Task-Space
State Machine
N/A
Jacobian PD-Control, Geometric (Projected
Primitives
2D)
PR2 Towels
Scripted Grasp and
Manipulation Prim.
Implicit Cloth Physics
PR2 Socks
Scripted Grasp and
Manipulation Prim.
Implicit Cloth Physics
HRP-2 NAMO
ZMP Walking,
Jacobian PD Grasp
PR2 NAMO
HRP-2 MacGyver
Physics-Based
Long
Task-Space
State Machine
N/A
2D Rigid Body
Physics
Long
Task-Space
A* Variant
N/A
RRT Path Planner, PD
Control
2/3D Geometric
Simulation
Long
Mixed
Hierarchical
Backchaining
N/A
ZMP Walking,
Scripted Primitives
3D Physical
Simulation
Long
Mixed
A* Variant
N/A
Thesis statement
Physics-based Reinforcement Learning is a feasible and
efficient method for autonomous robot
manipulation, and enables adaptive behavior in
natural environments.
Reinfo
rceme
s
otic
nt Lea
Rob
rning
Thesis intuition
-3 3 3 0 7
09
0
Thesis Wish List
1. Whole-Body Manipulation
➡
Utilizes full robot capabilities
➡
Challenging domestic robotics
tasks
3. Stochastic Planning
➡
Handles model uncertainty
4. Model Learning
➡
Adapt to novel environments
5. Dynamic Constraints
➡
Capture rigid body behavior
2. Multi-Object Planning
A 97 3
1
Physics-based
Reinforcement Learning
3
2
Navigation Among Movable
Objects with Uncertain Dynamics
Online Learning for Navigation
Among Movable Objects
A 97 3
1
Physics-based
Reinforcement Learning
3
2
Navigation Among Movable
Objects with Uncertain Dynamics
Online Learning for Navigation
Among Movable Objects
Efficiency in Model-Based RL
Models let you
simulate experience
Online Learning Curves
Reward
Faster model
learning = faster
policy learning
Time
10
3
2
f (R6n+4 ) ! R1
3
f (x1 , . . . , fx , . . . ; x1 ) + ✏
3
2
3
05
+1
= 4 f (x1 , . . . .,.f.x , . . . ; x1 ) +5✏
.1
1
5
. . 5 = 4f (x1 , . . . , fx , . .. .. ;. ✓˙n ) + ✏
t+1
f (x1 , . . . , fx , . . . ; ✓˙n ) + ✏
State:
n
Object-Oriented MDPs
s = [ni=1 oi .attributes
s = [ni=1 oi .attributes
Diuk et al. (ICML 2007)
Attributes
Classes
Relations
x
Person
in(person, taxi)
y
Taxi
contactN(o1,o2)
inTaxi
Wall
contactS(o1,o2)
Destination
contactE(o1,o2)
Condition:
c = [R
k=1 rk (oi , oj ) 8i 6= j
c=
1
[R
k=1 rk (oi , oj )
8i 6= j
2
contactW(o1,o2)
s1≠s2≠s3 c1≠c2=c3
3
key idea
An Object-Oriented Representation for Effici
OO-MDP limitations
Discrete state-space
Deterministic boolean effects
go-right(s, c)
wall
no wall
OO-M
mode
No plant dynamics
erty o
object has
that w
velocity
tion.
throug
experiences
forces
When
s.x=s.x s.x=s.x + 1
tion
b
do-nothing(s,c)
Diuk et al. (ICML 2007)
lished
mines
tribute
s.x = ?
is defi
Figure 1. The taxi domain. (a) Original 5 × 5 Taxi problem. (b)
that ar
Extended 10 × 10 version, with a different wall distribution and 8
when
possible passenger locations and destinations.
i2N
EXTRA MATH FOR PROPOSAL
Model signature
(23)
P (s0 |s, a) = P (x01 , y10 , ✓10 , ẋ01 , ẏ10 , ✓˙10 , ..., x0n , yn0 , ✓n0 , ẋ0n ,(ICML
ẏn0 , ✓˙n0 |x1 ,2014)
y1 , ✓1 , ẋ1 , ẏ1 , ✓˙1 , .
(22)
Object-Oriented
• actions Regression
(20)
As a regression problem:
1) Define oriented collision predicates
(21)
contactθ=0(oi)
(22)
contactθ=20(oi)
a = [fx , ff(R
⌧, i]) | ! R6n
y ,6n+4
(24)
2) Use regression model
fx , fy , ⌧ 26n+4
R
for each
f (R condition
) ! R1
True
(25)
{
s’
2
i
3
2 2N
3
f (x1 , . . . , fx , . . . ; x1 ) + ✏
Model signature (26)
4 ... 5 = 4
5
...
f (x1 , . . . , fx , . . . ; ✓˙n ) + ✏
✓˙nt+1
(23) …
P (s0 |s, a) = P (x01 , y10 , ✓10 , ẋ01 , ẏ10 , ✓˙10 , ..., x0n , yn0 , ✓n0 , ẋ0n , ẏn0 , ✓˙n0 |x1 , y1 , ✓1 , ẋ1 , ẏ1 , ✓˙1
contactθ=180(oi) False
True
0
xt+1
1
As
a regression
problem:
(controlled
dynamical system)
is estimated online from avail-
a
s
where f (s, a; i ) denotes the predictor for the ith
able input-output measurements [15]. Adaptation is typically 6n+4
dimension parameterized
by i .2
6n
(24)
f (R Defining
) !X̃ R:= [s, a] for notational convenience,
done in two stages: (1) estimation of the plant parameters
Need 6n+4
ofcanthese
per
using a Parameter Adaptation Algorithm (PAA) (2) updating
predictors
be fit for
eachcondition
output dimension using
controller parameters based on the current plant parameter squares:
T
1
0
ˆ
estimates. PBR can be understood as a PAA generalized to 6n+4
1 i = (X̃ X̃) X̃si
(25)
f (R
) !R
support non-linear model estimation using Bayesian approxB.
Locally
Weighted State-Space Regression
imate inference. Alternative approaches to non-linear system
Locally-Weighted Regression is structured similarl
identification can be found in [?].
Finally, there are several results in object pushing with- introduces a query-dependent kernel whose role is to
out explicit physical knowledge [18], [24], however these notion of similarity that allows predictions to be bias
approaches are restricted to holonomic objects. We are inter- their nearby training points. The kernel function is us
⇤
j
C=[001100…01010]
ested in tasks
in human environments, which can frequently compute a positive distance wj = k(X̃ , X̃ ) betwee
query point X̃ ⇤ and each element X̃ j of the trainin
include objects with wheels and hinges.
used locallyThese weights are collected
into a diagonal matrix W
(240 dim, n=12)
used to produceweighted
predictions with
weighted least-squar
regression
III. OVERVIEW
Applied to entire scene
Existing work on data driven dynamics modeling for
robotics typically focuses on the low-level control problem
(e.g. [21]), and requires learning the dynamics of the robot
itself. Non-parametric regression is an appropriate choice
for these situations as model fidelity is critical and robot
mechanisms are generally complex and difficult to model.
However, the mobile manipulation tasks we consider here
are unique in that (a) tasks often involve many objects with
⇤
i
s0i
= ((X̃ T W X̃)
= X̃ ⇤T
1
X̃ T W yi 0
⇤
i
In contrast to the parametric approach in Eq. 3, the m
parameters ⇤ are re-computed for each query. As a
the regression coefficients are free to vary across the
space, allowing LWR to model nonlinear functions
least-squares.
OO-LWR limitations
Must discretize the collision space
Latex Math
θ5
θ4 θ3
Jonathan Scholz
θ6
θ⇤2
April
16,
2014
θ
7
θ8
) ! s0
θ9 θ10
θ1
|C| = n2P
θ12
C: number of conditions
n: number of objects
P: number of collision sectors
θ11
h) / P (h| )P ( )
Need exponential
number
0
0 of predicates!
= arg maxa P (s |s, a, )V (s )
3
2
0
s 1 a1 s 1
6 s2 a2 s02 7
6
7
h=6 .
..
.. 7
4 ..
.
. 5
sT
aT
s0T
Limits data
per condition
(1)
c1
c2
c3
c4
…
Dynamic physical inferences
Static physical inferences
Will it fall?
Which color is heavier?
Physical Understanding in Humans
speed, generality, a
speed, generality,
and
speed,
general
enough
forthe
theabil
pu
enough for theTo
purposes
ofth
e
enough
make for
this
pr
Tothe
make
th
To make this
proposal
con
specify
nature
the
na
specify the nature
of these
finespecify
grained
they
practice:
fineare.
grained
fine grainedneering
they
Heret
roundings
often
neering
practeh
neering practice:
People’s
relaxed
faultmuch
toler
roundings
oft
roundings often
have
generality
over
th
relaxed
fault
relaxed
fault
tolerances,
lea
Battaglia
et al.
2013
Fig. 1. Everyday scenes,
activities,
and art that evoke
strong
physical
speed,
generality,
and
the
ability
problems.
Our
ini
generality
ove
itions. (A) A cluttered workshop that
exhibits many
nuanced
physical pro
generality
over
the degree
eral-purpose
appro
enough
for
the
purposes
of
ever
ties. (B) A 3D object-based
representation
of
the
scene
in
A
that
can
sup
problems.
Ou
problems. Our
initial
IPE
m
Dynamics
Engine
physical inferences based on
simulation.
(C)
A precarious
stack of
dishesa
To
make
this
proposal
concre
eral-purpose
eral-purpose
approximation
t
approximate
rigidlike an accident waiting to happen. (D) A child exercises his physical reaso
specify Dynamics
the nature
of
these
app
Dynamics
En
Engine
(ODE)
(
Carlo
appr
by stacking blocks. (E) Jenga puts players’ physicalMonte
intuitions
to the
tes
approximate
mechanism
for
approximate
dyna
fineourgrained
theyarigid-body
are.
Here(Photo
thr
“Stone balancing” exploits
powerful
physical
expectations
throu
Monte Carlo
Monte
Carloprobabilities
approach
of bl
stone balance by Heiko neering
Brinkmann).
practice:
People’s
ever
sents
objects’
geo
a
mechanism
a
mechanism
for
represent
Fig. 1. Everyday scenes, activities, and art that evoke
strong physicaloften
inturoundings
have
much
tig
tributions
by
inert
probabilities
t
probabilities
through
these
p
itions. (A) A cluttered workshop
many
nuanced
physical
properFig.that
1. exhibits
Everyday
scenes,
activities,
and
art
that
evoke
strong
physic
relaxed
fault
tolerances,
leadin
thesents
conservation
planning,
action,
reasoning,
and
language
(Fig.
2A).
At
its coa
objects’
ties. (B) A 3D object-based representation
the scene
in A thatthat
can exhibits
support
sents
objects’
geometries
itions. (A) A of
cluttered
workshop
many
nuanced
physical
implicitly
via coar
Fig. 1.
Everyday
scenes,
art
that
evoke
strong
physical
intuan and
object-based
representation
ofover
a 3D
scene—analogous
top
generality
the
degree
of
scenes,
activities,
and
art activities,
that
evoke
strong
physical
intuphysical
inferences
based
on simulation.
(C)
A
precarious
stack
of
dishes
looks
tributions
by
i
ties. (B) A 3D object-based representation
of the
scene
in
A
that
can
s
tributions
by
inertial
tensors
Our
model
runs
t
geometric
models
underlying
computer-aided
design
progr
itions.
(A)
cluttered
workshop
that
exhibits
many
nuanced
physical
properred
workshop
that exhibits
nuanced
physical
properlike
anAaccident
waiting
tomany
happen.
(D)
A child
exercises
his
reasoning
problems.
Our
initial
IPE
mod
the
conservat
physical
inferences
based
onphysical
simulation.
(C)
A
precarious
stack
of
dishe
the
conservation
of
energy
from
the
observe
(Fig.
the
physical
governing
the scene’s dynam
ties. by
(B) stacking
Arepresentation
3D object-based
representation
ofphysical
the
scene
in A that
can
support
ct-based
the
scene
in1B)—and
A that
can
support
blocks. (E)ofJenga
puts
players’
intuitions
toforces
the
test.
(F)
like an accident waiting to happen. (D) A child exercises
his physical
implicitly
viarea
The Intuitive Physicist
•
Physics-engine with random variables
•
Works by sampling model beliefs and
simulating to generate predictions
...
Battaglia et al. 2013
Learning Kinematic and Dynamic Constraints
Learning
Kinematic and
Dynamic
Constraints
Whole-Body
Manipulation
Multi-Object
Planning
Stochastic
Planning
Model
Learning
Dynamic
Constraints
No
Yes
No
Yes
Yes
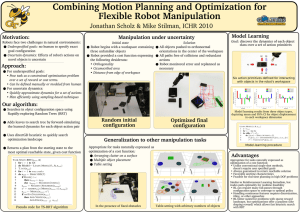
•
Domain: Planar object manipulation (arbitrary)
•
Objective: Learn compact model
•
Learning approach:
•
Stochastic physics engine model representation
•
MCMC estimator for unknown physical parameters
6 71
0 32 0
016
Model-Based RL Loop
PyMC
Idea:
Use physics-engine as model representation
Technical
contribution:
Formalize model learning problem
and develop inference method
6 71
0 32 -37 4 13 3
30 7 5
(ICML 2014)
f (s, a) ! s0
Physics API is
Learning Target
f (s, a; ) ⇡ s0
Place prior on API
parameters
8s, a
Estimate posterior
from data 0
L( |h) = P (s |s, a; )
body {
mass
inertia
joint.wheel
joint.hinge
| |
P ( |h) / P (h| )P ( )
P (s0 |s, a, )
⇡(s) = arg maxa P (s0 |s, a,
h
Model Parameters
Three classes of parameters
Rigid-body
parameters
Anisotropic friction
constraints
Distance
constraints
⇡(s)
Rigid body parameters
(m, r, µc )
Mass
For computing accelerations
We assume uniform density
ms
i
(wx , wy , w✓ , µx , µy )
Restitution
Friction
For computing perpendicular
contact forces
For computing tangential
contact forces
(ia , ib , ax , ay , bx , by )
Proportional to normalforce (Coulomb friction)
:= (m, r, µc , wx , wy , w✓ , µx , µy , ia , ib , ax , ay , bx , by )
heel
⌧
↵= =I
I
Anisotropic friction
1
⌧
(wx , wy , w✓ , µx , µy )
stance
Pose parameters
Friction Coefficients
(ia ,oniba, body
ax , ay , The
bx , orthogonal
by )
For placing constraint
friction components
l params
i
:= (m, r, µc , wx , wy , w✓ , µx , µy(-0.3,
, ia , ib0,
, ax0,, a0.1,
, by )
y , bx0.8)
"y
wx
wy
Object-frame
wθ
"x
wheel
12)
(wx , wy , w✓ , µx , µy )
13)
(ia , ib , ax , ay , bx , by )
Distance
constraint
distance
All params
14)
=
PositionB
Body indices
PositionA
:=
(m,
r,
µ
,
w
,
w
,
w
,
µ
,
µ
,
i
,
i
,
a
,
i
c
x
y
x y a b x ay , bx , by )
✓
Indicates two bodies to
anchor the constraint
Anchor offset on the
first body
bx
by
body a
ax
ay
body b
anchor a
l
anchor b
Anchor offset on the
second body
Inverted pendulum
)
B3
099
Random ⇡(s)
Paccept (
t|
239
t
✓
q( t )
1 ) = min 1,
q( t 1 )
013
◆
(s0 |s, a)
14 physical parameters per object
0)
i
:= (m, r, µc , wx , wy , w✓ , µx , µy , ia , ib , ax , ay , bx , by )
Scenes have
many objects
φ2
φ3
φ4
φ5
φ1
Φ
Gathering data
Touch or
Grasp Object
Apply
forces
Track
object
Unlocked Caster
Locked Caster
Data = State Trajectory & Applied forces
Compute equivalent
force in body-frame
0
L( |h) = P (s |s, a; )
Learning Parameters
| |
Bayesian Inference:
Φ is a generative model of h
P ( |h) / P (h| )P ( )
0
P
(s
|s,
a,
)
Posterior: will reflect robot’s updated beliefs
after observing h
0
0
⇡(s)
=
arg
max
P
(s
|s,
a,
)V
(s
)
a
Likelihood: should prefer accurate predictions
Prior:
should support only legal values2
s1
6 s2
6
h=6 .
y their
2⇡
w
J =4
respectivet=1
coefficients
2
ẏ 5 + 4 0 5 ⇥ R
˙
(✓)
✓˙
wx
wy (11)
535
536
µ
0
b (wheel)
(2)
body
velocityb Jtofor
body
frame (or
in principle
to 537
joint frame, if we
Eq.rotate
11 tells
us bthat
proposed
model
paf = the xlikelihood
ever include
rotation)0on aµyGaussian centered on the prerameters
are evaluated
538
b
1w
force
(impulse)
back
to
the
world
frame
dicted next state for a generative physics
J = R world
J parameter539
ized
by ˜ (i.e.,
with force
known
and– proposed
(3)
compute
friction
inbgeometry
body frame
just scaledynamthe components
540of the velocity
w
f noise,
= R( fthe
) coefficients
ics).
Due(2)toby
Gaussian
log-likelihood for is obfrom
their respective
541
the
forceby
accumulator
...
tained
summing squared
distances
542
between the observed
ntvalue
as single
expression:
0andb action:
and
the
predicted
state for
eachµstate
x
b trajectories
L2 penalty
on
sample
543
f
=
J 1
02
3 2 30 µ
✓ y
◆
ẋn
0
544
⇣
⌘
µx 0
w
2
x
1 @4 X
40 0to5the
ẏ 5 +
= Rrotate this force
R (impulse)
⇥ world
R ˜ frameA
(4)
back
545
ln0P (h|
(st ˙ f (st , at ; w)y
(12)
µy , ) =
˙
(✓)
✓
546
t=1
w
b
f = R( f )
547
Along with the prior defined in Table 1, this provides the
(5) add in to the force accumulator ...
548
necessary
components
for
a
Metropolis
sampler
for
Eq.
10.
) = ln (Pas
(h|single
)P ( expression:
))
Wheel q(
constraint
549
Learning Parameters
n ⇣
2X 3 2 3
⌘0
X
2
0
✓
ẋ P (p) 0
˜
=
s
f
(s
,
a
;
)
+
t
t
0
tµx generated
w
Posterior
samples
MCMC
5 + 4 0 5 ⇥ R wx
ẏ
f =t=1
R
R 1 @4by
p2
0 µy
wy
˙
˙
(
✓)
✓
✓
◆
MCMC Paccept ( t | t 1 ) = min 1, q( t )
q( t 1 )
q( ) =1 ln (P (h| )P ( ))
n ⇣
⌘2 X
X
0
=
st f (st , at ; ˜ ) +
P (p)
t=1
Paccept (
t| t
p2
✓
q( t )
1 ) = min 1,
q( t 1 )
1
◆
◆
1
A
{wx, wy, 0, 0.1, 0.8}
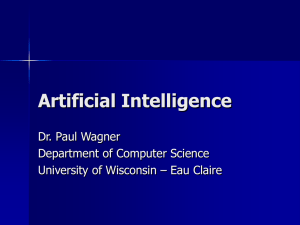
Online Performance
ICML 2014
−100
TRUE
PBRL
OOLWR
LWR
−300
Reward
Reward
0
Shopping Cart MDP
0
200
Apartment MDP
400
600
800 1000
−40
−80
TRUE
PBRL
OOLWR
−120
Reward
Reward
0
Step
0
200
400
600
Step
Step
800 1000
Learning on Steel Cart
ICRA 2014
Prior Prediction
Updated Beliefs
Gathers Data
Contributions
Formalized learning
from manipulation
data
Allows autonomous
learning on arbitrary
objects
Compact physicsbased model
Very data-efficient vs.
OO-LWR
Successfully
applied to real robot
One-shot learning on
tables and cart
Limitations
Not demonstrated
in real online task
Up Next!
A 97 3
1
Physics-based
Reinforcement Learning
3
2
Navigation Among Movable
Objects with Uncertain Dynamics
Online Learning for Navigation
Among Movable Objects
Navigation Among Movable Objects with Uncertain Dynamics
Objective:
•
Create collision-free path to goal
Challenge:
•
Which objects are relevant?
A Well-Studied Problem
M.#S%lman#and#J.#Kuffner.#Naviga&on)Among)Movable)Obstacles:)Real6&me)
Reasoning)in)Complex)Environments.#In#Journal#of#Humanoid#Robo%cs,#2004.#
M.#S%lman,#K.#Nishiwaki,#S.#Kagami,#and#J.#Kuffner.#Planning)and)execu&ng)
naviga&on)among)movable)obstacles.#IROS#2006.#
M.#S%lman#and#J.#Kuffner.#Planning)among)movable)obstacles)with)ar&ficial)
constraints.#In#WAFR,#2006.#
Jur#van#den#Berg,#Mike#S%lman,#James#Kuffner,#Ming#Lin,#Dinesh#Manocha.#Path#
Planning#Among#Movable#Obstacles:#A#Probabilis%cally#Complete#Approach.##
WAFR#2008.#
D.#Nieuwenhuisen,#A.#van#der#Stappen,#and#M.#Overmars.#An)effec&ve)framework)
for)path)planning)amidst)movable)obstacles.##WAFR,#2008.#
…
Curse of Dimensionality
BOOMDP
State space: configuration
330 of Based
Reinforcement
Learning
(PBRL), which trades flexrobot
and every
object
•
331
ibility for efficiency.
332
333 • 2.
Assuming
resolution n:
NAMO Stuff
334
335
Cr = {x, y, ✓} ! |Cr | = O(n3 )
n
336
Coi = {x, y, ✓} ! |Coi | = O(n3 )
337
Qk
338
=) C = Cr ⇥ i=0 Coi = O(n3(k+1) )
339
⇤
V
(s) = maxa2A Q(s, a)
340
341
⇡ ⇤ (s) = arg maxa2A Q(s, a)
342
• Search is exponential in the
343
References
344 number of objects
345
Bhat, K.S., Twigg, C.D., Hodgins, J.K., Khosla, P.K.,
346
Popović, Z., and Seitz, S.M. Estimating cloth simula347
tion parameters from video. In SIGGRAPH. Eurograph348
ics Association, 2003.
n
Model Uncertainty
•
Low-level uncertainty: how does this object move?
•
High-level uncertainty: can I use this object?
NAMO MDP
(WAFR 2012, ICRA 2013
•
Natural state abstraction: free-space regions
•
Corresponding action abstraction: clear opening to
neighboring free-space
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
ibility for efficiency.
R = Rewards
(5)
Transition Model def:
Stam, J. Stable 3fluids.
a
a
a
P11
P12
. . . P1n
a conference
a 7 on C
6 P anual
P
.
.
.
P
22
2n 7
6 21
T (s, a, s0 ) = P (s0 |s, a) = 6 .. techniques.
ACM
..
..
.. 7 Pres
4 .
. 5
.
.
P a1999.
Pa ... Pa
2
Solving a NAMO-MDP
LowLevel
HighLevel
2. NAMO Stuff
Cr = {x, y, ✓} ! |Cr | (6)
= O(n3 )
control: a survey. Cog
Coi = Dynamics
{x, y, ✓} ! |Coi | = O(n3 )
Planningn1 n2
Transition Model def (no actions):
Qk
2
=) C = Cr ⇥ i=0 Coi = O(n3(k+1) )
P11 P12 . . .
Physics
⇤
(7)
V (s) = maxa2A Q(s, a)
⇡ ⇤ (s) = arg maxa2A Q(s, a)
0
P1n
. . . P2n
..
..
.
.
. . . Pnn
nn
3
Monte-Carlo
Search 77
6 Tree
6 P21 P22
0
0
T (s, s ) = P (s |s) = 6
4
..
..
.
.
Pn1 Pn2
Bellman equation (no actions)
7
5
P
X
2 (s = j|s = i) =
3
(8)
V (s) = R(s) +
P (s0 |s)V (s0 )
p1,1 p1,2 . . . p1,j . . .
s0
6p2,1 p2,2 . . . p2,j . . .7
6
7 equation
Bellman
6 ..
..
..
"
#
..
.. 7
6 .
7
X
.
.7 .
.
.
6
(9)
V (s) = max R(s, a) +
P (s0 |s, a)V (s0 )
6 pi,1 pi,2 . . . pi,j . . .7
a
s0
4
5
..
..
.. Bellman
. .Matrix
..
Stochastic
Iteration
as update rule, forValue
t steps to go
(value iteration)
.
.
.
.
.
"
⇤
(10)
Vt+1
(s)
P
(f
=
j|f
=
i)
=
t+1
t
2
3
f1,1 f1,2 ... f1,j
6 f2,1 f2,2 ... f2,j 7
6
7
6 ..
7
..
..
4 .
5
.
.
fi,1 fi,2 ... fi,j
P
V (s) := s0 P⇡(s) (s, s0 ) R⇡(s) (s, s0 ) + V (s0 )
References
max R(s, a) +
a
1
F1
F3
X
s0
P (s0 |s, a)Vt⇤ (s0 )
F2
F4
#
Scalability
•
Algorithm typically
linear in |O|
•
Adjacency graph
directly controls the
complexity of ValueIteration
F5
F4
F6
F7
Only 8 States!
F3
F2
F1
F0
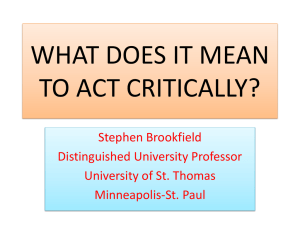
Highlighted Behavior
•
•
Robot adapts to stationary object:
•
Initially selects table
•
Updates model and switches
to couch
Limitations:
•
Manipulation planning in
joint-space (KD-RRT)
•
Model “learning”:
thresholded movable flag
Contributions
Value-based
Planning
Combines reward and
model uncertainty
Compact high-level
dynamics
Solves object relevance
problem
Limitations
Stationary Belief
Distributions
No online model
learning
Implemented in
Simulation
Doesn’t use realistic
control stack
A 97 3
1
Physics-based
Reinforcement Learning
3
2
Navigation Among Movable
Objects with Uncertain Dynamics
Online Learning for Navigation
Among Movable Objects
Platform
GoToFreeSpace(Oi,Fj)
GetGraspPoint
NavigateToPoint
Grasp
ClearObstacle
(vobj, k)
} System Control
Body Controller
(pbase) x k
(pobj) x k
Base Controller
Manipulation Controller
(vl,vr)
Wheels
} Motor Control
(vm) x 16
IMU
Vision
FT
Modules
} Sensorimotor
Sensory
Motor
Whole-Body Manipulation
Free Parameter: vo (3-dim)
vo
vo
Desired Object
Velocity
vm
vb
Manipulation Controller
Robot Body
Trajectory
vb
vm
Grasp Sampling
Free Parameter: gθ (1-dim)
Model-specific distribution
•
Sample grasp angle:
gθ~ P(θ|Φ)
•
Compute projected
boundary point
•
Reject if not reachable
Manipulation Policies
P(%|Φ)
Planner operates over vo and gθ
Linear Velocity
(vx,vy)
Static
None
Unconstrained ±vx and ±vy
Angular Velocity
(vθ)
None
N/A
±vθ at
object center
Uniform
Anisotropic
±vu along unconstrained axis
±vθ at
(u = argminx,y($x,$y).
constraint anchor
Fixed-Point
±vθ at
constraint anchor
None
Grasp Points
(gθ)
Faces perpendicular to
unconstrained axis.
Top and bottom faces
opposite to constraint
Example
N/A
NAMO with Static Constraint
NAMO with Non-Static Constraint
Learning Via Contact
Summary and Contributions
Physics Engine +
Reinforcement Learning + ϵ
=
Adaptive Manipulation
1. Physics-Based Reinforcement Learning
•
Data-efficient model learning for multi-body dynamics
2. NAMO-MDP
•
Fast decision-theoretic solution for NAMO with uncertain dynamics
3. Online Learning for NAMO
•
First NAMO planner which adapts to novel objects
•
First collision-learning result in mobile manipulation
Publications
•
SCHOLZ, J. and STILMAN, M., “Combining motion planning and optimization for flexible robot
manipulation,” in Humanoids, 2010.
•
SCHOLZ, J., CHITTA, S., MARTHI, B., and LIKHACHEV, M., “Cart pushing with a mobile
manipulation system: Towards navigation with moveable objects,” in ICRA, 2011.
•
LEVIHN, M., SCHOLZ, J., and STILMAN, M., “Planning with movable obstacles in continuous
environments with uncertain dynamics,” in ICRA, 2013.
•
LEVIHN, M., SCHOLZ, J., and STILMAN, M., “Hierarchical decision theoretic planning for
navigation among movable obstacles,” in WAFR, 2012.
•
SCHOLZ, J., LEVIHN, M., ISBELL, C., “What Does Physics Bias: A Comparison of Model Priors
for Robot Manipulation,” in RLDM, 2013.
•
SCHOLZ, J., LEVIHN, M., ISBELL, C., and WINGATE, D., “A Physics-Based Model Prior for
Object-Oriented MDPs,” in ICML, 2014.
•
SCHOLZ, J., LEVIHN, M., ISBELL, C. L., CHRISTENSEN, H., and STILMAN, M., “Learning nonholonomic object models for mobile manipulation,” in ICRA, 2015.
Special thanks to my
committee, and Mike Stilman