Dirichlet Processes and Mixture Models An interactive tutorial: Part 2 Pfunk Meeting 2
advertisement

Dirichlet Processes and
Mixture Models
An interactive tutorial: Part 2
Pfunk Meeting 2
Fall ’11
*some content adapted from El-Arini 2008 & Teh 2007
Demo Code: http://www.cc.gatech.edu/~jscholz6/resources/code/DP_Tutorial/
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
1
Motivation:
TypicalModeling
Bayesian Observed
Approach Data
•
•
Say we observe x1,...,xn, with xi~F
•
A conventional bayesian would place a prior over
F from some functional family, and use data to
compute posterior
Parametric models suffer from over/under
fitting when there’s a misfit between the
complexity of the model and data
•
Traditional approaches (cross validation, model
averaging) involve user-defined criteria that are
error-prone in practice*
* e.g. thresholding likelihood functions and stuff
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
2
Topics
• Review of Dirichlet Process Concepts &
Metaphors from last week
• Running example: Density estimation with
mixture of gaussians
• Learning Gaussian Mixtures with EM
• Learning (infinite) Gaussian Mixtures with
MCMC (Gibbs Sampling)
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
3
Some Process Metaphors
•
We talked about 3 related processes:
Chinese Restaurant Process
• Polya-urn
• Involves drawing and replacing balls from an urn
• Chinese Restaurant
• Involves customers sitting at tables in proportion
Generating from the CRP:
First customer sits at the first table.
Customer n sits at:
nk
Table k with probability α+n−1
where nk is the number of customers
at table k .
α
A new table K + 1 with probability α+n−1
.
Customers ⇔ integers, tables ⇔ clusters.
The CRP exhibits the clustering property of the DP.
2
1
4
3
Yee Whye Teh (Gatsby)
7
6
DP and HDP Tutorial
9
Mar 1, 2007 / CUED
to their popularity
truction
• Stick-breaking
• Involves breaking off pieces of a stick of unit
∼ DP(α, H) look like?
probability one, so:
G=
8
5
∞
�
πk δθk∗
k =1
nstruction shows that G ∼ DP(α, H) if:
length
!(1)
!(3)
!(2)
!(4)
!(6)
!(5)
J. Scholz (RIM@GT)
) if π = (π1 , π2 , . . .) is distributed as above.
DP and HDPSeptember
Tutorial
Mar 1, 2007 / CUED
Friday,
2, 2011
15 / 53
09/02/2011
4
13 / 53
Some Process Metaphors
•
We talked about 3 related processes:
Chinese Restaurant Process
• Polya-urn
• Involves drawing and replacing balls from an urn
All
these
share
the
property
of
carving
up
Restaurant
•ourChinese
sample space into a discrete distribution
• Involves customers sitting at tables in proportion
Generating from the CRP:
First customer sits at the first table.
Customer n sits at:
nk
Table k with probability α+n−1
where nk is the number of customers
at table k .
α
A new table K + 1 with probability α+n−1
.
Customers ⇔ integers, tables ⇔ clusters.
The CRP exhibits the clustering property of the DP.
2
1
4
3
Yee Whye Teh (Gatsby)
7
6
DP and HDP Tutorial
9
Mar 1, 2007 / CUED
to their popularity
truction
• Stick-breaking
• Involves breaking off pieces of a stick of unit
∼ DP(α, H) look like?
probability one, so:
G=
8
5
∞
�
πk δθk∗
k =1
nstruction shows that G ∼ DP(α, H) if:
length
!(1)
!(3)
!(2)
!(4)
!(6)
!(5)
J. Scholz (RIM@GT)
) if π = (π1 , π2 , . . .) is distributed as above.
DP and HDPSeptember
Tutorial
Mar 1, 2007 / CUED
Friday,
2, 2011
15 / 53
09/02/2011
4
13 / 53
Characterizing the Process
•
We talked about how to describe their
dynamics, or “average behavior”
•
All are infinite-dimensional generalizations of
the Dirichlet distribution with params (αH)
•
“Any finite partition (marginal) of these
infinite processes will be Dirichletdistributed”
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
5
Why “Dirichlet”?
Tying it all together
•
•
Assuming a process exists with dirichlet marginals, we
can leverage the properties of dirichlet-multinomial
conjugacy for inference
β | X = (β1 , ..., βK ) ∼ M ult(X),
Recall: Can obtain dirichlet posterior given some
observed data β by simply adding α and β (vectors)
•
•
where i is the number of occurrences o
β | Xdistribution
= (β1 , ..., βK )on
∼M
ult(X),
if discrete
1, ..., K defined b
then: X | α, β ∼ Dir(α + β).
where i is the number of occurrences of i
discrete distribution on 1, ..., K defined by X
* where
β is the number of occurrences of i in a sample of n
α
points
distribution
1,...,K defined by X
Xfrom| the
β discrete
∼ Dir(α
+onβ).
i
µ
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
6
Why “Dirichlet”?
Tying it all together
So, just like with the dirichlet distribution,
•
Urn Scheme
the DP is closed under bayesian updating
(multiplication)
Can use this property to derive an
•
urn scheme produces a sequence θ1 , θ2 , . . . with the
expression for parameters given data:
ng conditionals:
θn |θ1:n−1 ∼
J. Scholz (RIM@GT)
Friday, September 2, 2011
�n−1
δθi + αH
n−1+α
i=1
09/02/2011
This is the
Polya-Urn
7
ya’s urn scheme produces a sequence θ1 , θ2 , . . . with the
wing conditionals:
A closer look at the DP posterior
θn |θ1:n−1 ∼
�n−1
δθi + αH
n−1+α
i=1
Weird equation: combines discrete (counts) with continuous (H)
•
gine picking balls of different colors from an urn:
Equation is of the form (p)f(Ω) + (1-p)g(Ω)
•
Start with no balls in the urn.
thatdraw
proportion
of density
is associated
with f, so
with probability
∝ α,
θn ∼pH,
and add
a ball of
• Implies
canurn.
split the task in half:
that color intowethe
With probability
∝ flip
n −a bern(p)
1, pickcoin.
a ball
at random
If heads,
draw fromfrom
f, if tails, draw
• first
the urn, record from
θn tog be its color, return the ball into
the urn and place
a
second
ball
of
same
color
into
for
polya
urn,
gives
us
either
a
sample
from
existing balls
•
(f), or a new color (g)*
urn.
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
8
DP Summary
•
Distributions drawn from a DP are discrete, but
cannot be described using finite parameters
(hence “non-parametric”)
•
Why “Dirichlet”? Because marginals and
posteriors match dirichlet distribution
•
•
This is where the urn scheme comes from, and
(more importantly) provides a way to do Gibbs
sampling
A more esoteric tutorial would explain that the DP is the “De Finetti distribution
underying the polya urn”, which is what makes the samples i.i.d. under a DP prior,
and therefore permutable in a sampler, making our lives much easier
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
9
Topics
• Review of Dirichlet Process Concepts &
Metaphors
• Running example: Density estimation with
mixture of gaussians
• Learning Gaussian Mixtures with EM
• Learning (infinite) Gaussian Mixtures with
MCMC (Gibbs Sampling)
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
10
Running Example: Gaussian Mixtures
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
11
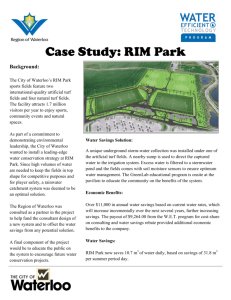
Running Example: Gaussian Mixtures
!"#$%&#$"'
We are given a bunch of data points and
` !"#$%"#&'(")#$#*$+$#,"+-#$)*#$%"#+./*#+0$+#'+#1$,#
told it was generated by a mixture of
&")"%$+"*#2%.3#$#3'4+5%"#.2#6$5,,'$)#*',+%'75+'.),8
gaussians
•
`
9)2.%+5)$+"/:-#).#.)"#0$,#$):#'*"$#!"#$%&'( 6$5,,'$),#
;%.*5<"*#+0"#*$+$8
J. Scholz2 (RIM@GT)
Friday, September 2, 2011
09/02/2011
11
Running Example: Gaussian Mixtures
!"#$%&#$"'
We are given a bunch of data points and
` !"#$%"#&'(")#$#*$+$#,"+-#$)*#$%"#+./*#+0$+#'+#1$,#
told it was generated by a mixture of
&")"%$+"*#2%.3#$#3'4+5%"#.2#6$5,,'$)#*',+%'75+'.),8
gaussians
•
`
•
Unfortunately, no one said how many
9)2.%+5)$+"/:-#).#.)"#0$,#$):#'*"$#!"#$%&'(
6$5,,'$),#
gaussians produced the data
;%.*5<"*#+0"#*$+$8
J. Scholz2 (RIM@GT)
Friday, September 2, 2011
09/02/2011
11
#$%&#$"'
Running Example:
Gaussian
Mixtures
Example:
Motivation
Gaussian
Mixtures
"#$%"#&'(")#$#*$+$#,"+-#$)*#$%"#+./*#+0$+#'+#1$,#
)"%$+"*#2%.3#$#3'4+5%"#.2#6$5,,'$)#*',+%'75+'.),
• Could it be this?
2.%+5)$+"/:-#).#.)"#0$,#$):#'*"$#!"#$%&'( 6$5,
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
12
#$%&#$"'
Running Example:
Gaussian
Mixtures
Example:
Motivation
Gaussian
Mixtures
"#$%"#&'(")#$#*$+$#,"+-#$)*#$%"#+./*#+0$+#'+#1$,#
)"%$+"*#2%.3#$#3'4+5%"#.2#6$5,,'$)#*',+%'75+'.),8
• Or perhaps this?
)2.%+5)$+"/:-#).#.)"#0$,#$):#'*"$#!"#$%&'( 6$5,,
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
13
What to do?
• We can guess the number of components,
run Expectation Maximization (EM) for
Gaussian Mixture Models, look at the
results, and then try again...
• We can run hierarchical agglomerative
clustering, and cut the tree at a visually
appealing level...
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
14
What to do?
• Really, we want to cluster the data in a
statistically principled manner, without
resorting to hacks...
>> for a preview, run demo 5.2
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
15
Real examples
• Brain Imaging: Model an unknown number
of spatial activation patterns in fMRI images
[Kim and Smyth, NIPS 2006]
• Topic Modeling: Model an unknown number
of topics across several corpora of
documents [Teh et al. 2006]
• Filtering and planning in unknown
state spaces (iHMM [Beal et. al. 2003],
iPOMDP [Doshi et. al. 2009])
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
16
Topics
• Review of Dirichlet Process Concepts &
Metaphors
• Running example: Density estimation with
mixture of gaussians
• Learning Gaussian Mixtures with EM
• Learning (infinite) Gaussian Mixtures with
MCMC (Gibbs Sampling)
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
17
Gaussian Mixture Modeling
•
•
β | X = (β1 , ..., βK ) ∼ M ult(X),
Gives a nice general way to fit densities to
multi-modal
data
where is the number of occurrences of i in a sa
i
discrete
distribution
on 1,sum
..., K
defined by X, then
Defined
as a weighted
of independent
gaussian
X | α, β RVs:
∼ Dir(α + β).
p(x | θ) =
α
K
�
i=1
πi G(x | µi , Σi )
µ
* Where θ is short for all parameters in the mixture (π, μ, Σ), and g
is short
σfor a gaussian distribution with mean μ and (co)variance Σ
J. Scholz Σ
(RIM@GT)
09/02/2011
i
Friday, September 2, 2011
i
try it! >> Prelim 3.1
18
Uses for GMM
•
•
Generic density estimation
•
Aims to fit parameters to bag of data as well as
possible
•
E.G. Modeling stock or commodity prices as
generated by hidden factors
Clustering!
•
Aims to uncover the latent classes of the
generating model, and where they live
•
E.G. Discovering goal regions to treat as subtasks
for an RL agent
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
19
How to fit toXdata:
EM
∼ M ulti(p) ⇒ P (X
X ∼ Dir(α) ⇒ P (Π =
Given a dataset of the form: X = x1 , x2 , ..., xn
How do we infer πi, μj, σj ???
try it! >> Demo 5.1
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
20
EM Overview
•
First lets associate a new latent variable z with each
data point that indicates which component the data
point came from
•
Then for however many components we have, assign
a mean and variance to the component:
Zi
π
Xi
θ
J. Scholz (RIM@GT)
Friday, September 2, 2011
xi: ith data point
π: overall mixing proportions
zi: ith component indicator
θ: component parameters
Too many
unknowns!
09/02/2011
21
EM Overview
• Chicken and Egg Dilemma:
• If we knew the proper component assignments, it'd
be trivial to work out μ and σ (just compute
sample mean and variance, or do bayesian thing if
we have prior beliefs)
•
•
If we knew μ and σ, it'd be trivial to work out the
component assignments (just do max likelihood
thing)
Solution:
•
Iteratively switch between these 2 things and wait
until the log-likelihood plateaus...
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
22
t
figuration, we wish to estimate the parameters oft=1
the GMM, λ, which in some
this expression
is a non-linear
the parameters
λ and
maximization
is not possible. However,
eely,
training
feature vectors.
There arefunction
several of
techniques
available
fordirect
estimating
the
i a special
eter
estimates
be obtained iteratively
case of (ML)
the expectation-maximization
(EM) algorithm [5].
st popular
andcan
well-established
method isusing
maximum
likelihood
estimation.
idea of
the EM which
algorithm
is, beginning
with of
an the
initial
model
totraining
estimate a new model λ̄, such that
eicmodel
parameters
maximize
the likelihood
GMM
givenλ,the
The
becomes
the initial
model
for the next between
iteration the
and the process is repeated until
rsp(X|λ).
X = {x
. . , xmodel
GMM
likelihood,
assuming
independence
1 , . new
T }, thethen
ergence threshold is reached. The initial model is typically derived by using some form of binary VQ estimation.
T
!
EM iteration, the following
re-estimation formulas are used which guarantee a monotonic increase in the model’s
Treat
component
assignments as latent variables,
and
p(xt |λ).
(4)
value, p(X|λ) =
EM Algorithm
where is the number of occurrences of i
discrete distribution on 1, ..., K defined by X
X
|
α,
β
∼
Dir(α
+
β).
•
t=1
switch
between:
ightsfunction of the parameters λ and direct maximization is not possible. However,
near
K
teratively using a special case of the expectation-maximization
(EM) algorithm [5].
T
estimating
indicators
by
conditioning
on the
"
m is, beginning with an initial model λ, to 1estimate
a new model λ̄, such that
Pr(i|xt , λ).i
w̄i =
parameters
step)
n becomes the initial model
for the next(E
iteration
is repeated untili
T t=1and the process
i=1of binary VQ estimation.
The initial model is typically derived by using some form
-estimation formulas are used which guarantee a monotonic increase in the model’s
•
p(x | θ) =
�
π G(x | µ
component
, Σi )
z¯i ∝ G(xiPr(i|x
| µ,
Σ)
, λ) x
•
µ̄i =
T
1"
Then
go
Pr(i|xt , λ).
w̄i =
T t=1
T
"
t
(5)
t
t=1
T
"
.
(6)
Pr(i|xt , λ)
back and recompute
the component
(5)
t=1
α
parameters
(μ and σ) given the current assignments (M
diagonal covariance)
step)
µ
"
Pr(i|x , λ) x
Pr(i|x , λ) x
σ
µ̄ =
. σ̄ =
(6)
− µ̄ ,
"
"
Pr(i|x , λ)
Pr(i|x , λ)
Σ
x , and µ refer to arbitrary elements of the vectors σ , x , and µ , respectively.
λ
J. Scholz (RIM@GT)
09/02/2011
i
T
"
T
t
t
t=1
T
2
i
t=1
T
i
t
t=1
t
i
2
t
t
2
t
t=1
i
2
t
i
pendence assumption
is often incorrect but needed to make the problem tractable.
T
"
Friday, September 2, 2011
(7)
23
t
figuration, we wish to estimate the parameters oft=1
the GMM, λ, which in some
this expression
is a non-linear
the parameters
λ and
maximization
is not possible. However,
eely,
training
feature vectors.
There arefunction
several of
techniques
available
fordirect
estimating
the
i a special
eter
estimates
be obtained iteratively
case of (ML)
the expectation-maximization
(EM) algorithm [5].
st popular
andcan
well-established
method isusing
maximum
likelihood
estimation.
idea of
the EM which
algorithm
is, beginning
with of
an the
initial
model
totraining
estimate a new model λ̄, such that
eicmodel
parameters
maximize
the likelihood
GMM
givenλ,the
The
becomes
the initial
model
for the next between
iteration the
and the process is repeated until
rsp(X|λ).
X = {x
. . , xmodel
GMM
likelihood,
assuming
independence
1 , . new
T }, thethen
ergence threshold is reached. The initial model is typically derived by using some form of binary VQ estimation.
T
!
EM iteration, the following
re-estimation formulas are used which guarantee a monotonic increase in the model’s
Treat
component
assignments as latent variables,
and
p(xt |λ).
(4)
value, p(X|λ) =
EM Algorithm
where is the number of occurrences of i
discrete distribution on 1, ..., K defined by X
X
|
α,
β
∼
Dir(α
+
β).
•
t=1
switch
between:
ightsfunction of the parameters λ and direct maximization is not possible. However,
near
K
teratively using a special case of the expectation-maximization
(EM) algorithm [5].
T
estimating
indicators
by
conditioning
on the
"
m is, beginning with an initial model λ, to 1estimate
a new model λ̄, such that
Pr(i|xt , λ).i
w̄i =
parameters
step)
n becomes the initial model
for the next(E
iteration
is repeated untili
T t=1and the process
i=1of binary VQ estimation.
The initial model is typically derived by using some form
-estimation formulas are used which guarantee a monotonic increase in the model’s
•
p(x | θ) =
�
π G(x | µ
z¯i ∝ G(xiPr(i|x
| µ,
Σ)
, λ) x
•
µ̄i =
T
1"
Then
go
Pr(i|xt , λ).
w̄i =
T t=1
T
"
t
t
t=1
T
"
component
, Σi )
(5)
Just evaluate each gaussian
PDF at xi and normalize
.
(6)
Pr(i|xt , λ)
back and recompute
the component
(5)
t=1
α
parameters
(μ and σ) given the current assignments (M
diagonal covariance)
step)
µ
"
Pr(i|x , λ) x
Pr(i|x , λ) x
σ
µ̄ =
. σ̄ =
(6)
− µ̄ ,
"
"
Pr(i|x , λ)
Pr(i|x , λ)
Σ
x , and µ refer to arbitrary elements of the vectors σ , x , and µ , respectively.
λ
J. Scholz (RIM@GT)
09/02/2011
i
T
"
T
t
t
t=1
T
2
i
t=1
T
i
t
t=1
t
i
2
t
t
2
t
t=1
i
2
t
i
pendence assumption
is often incorrect but needed to make the problem tractable.
T
"
Friday, September 2, 2011
(7)
23
t
figuration, we wish to estimate the parameters oft=1
the GMM, λ, which in some
this expression
is a non-linear
the parameters
λ and
maximization
is not possible. However,
eely,
training
feature vectors.
There arefunction
several of
techniques
available
fordirect
estimating
the
i a special
eter
estimates
be obtained iteratively
case of (ML)
the expectation-maximization
(EM) algorithm [5].
st popular
andcan
well-established
method isusing
maximum
likelihood
estimation.
idea of
the EM which
algorithm
is, beginning
with of
an the
initial
model
totraining
estimate a new model λ̄, such that
eicmodel
parameters
maximize
the likelihood
GMM
givenλ,the
The
becomes
the initial
model
for the next between
iteration the
and the process is repeated until
rsp(X|λ).
X = {x
. . , xmodel
GMM
likelihood,
assuming
independence
1 , . new
T }, thethen
ergence threshold is reached. The initial model is typically derived by using some form of binary VQ estimation.
T
!
EM iteration, the following
re-estimation formulas are used which guarantee a monotonic increase in the model’s
Treat
component
assignments as latent variables,
and
p(xt |λ).
(4)
value, p(X|λ) =
EM Algorithm
where is the number of occurrences of i
discrete distribution on 1, ..., K defined by X
X
|
α,
β
∼
Dir(α
+
β).
•
t=1
switch
between:
ightsfunction of the parameters λ and direct maximization is not possible. However,
near
K
teratively using a special case of the expectation-maximization
(EM) algorithm [5].
T
estimating
indicators
by
conditioning
on the
"
m is, beginning with an initial model λ, to 1estimate
a new model λ̄, such that
Pr(i|xt , λ).i
w̄i =
parameters
step)
n becomes the initial model
for the next(E
iteration
is repeated untili
T t=1and the process
i=1of binary VQ estimation.
The initial model is typically derived by using some form
-estimation formulas are used which guarantee a monotonic increase in the model’s
•
p(x | θ) =
�
π G(x | µ
z¯i ∝ G(xiPr(i|x
| µ,
Σ)
, λ) x
•
µ̄i =
T
1"
Then
go
Pr(i|xt , λ).
w̄i =
T t=1
T
"
t
t
t=1
T
"
component
, Σi )
(5)
Just evaluate each gaussian
PDF at xi and normalize
.
(6)
Pr(i|xt , λ)
back and recompute
the component
(5)
t=1
α
parameters
(μ and σ) given the current assignments (M
diagonal covariance)
step)
µ
"
Pr(i|x , λ) x
Pr(i|x , λ) x
Just update component
σ
µ̄ =
. σ̄ =
(6)
− µ̄ ,
(7) wparameters by taking the
"
"
weighted mean and variance
Pr(i|x , λ)
Pr(i|x , λ)
Σ
x , and µ refer to arbitrary elements of the vectors σ , x , and µ , respectively.
λ
J. Scholz (RIM@GT)
09/02/2011
i
T
"
T
t
t
t=1
T
2
i
t=1
T
i
t
t=1
t
i
2
t
t
2
t
t=1
i
2
t
i
pendence assumption
is often incorrect but needed to make the problem tractable.
T
"
Friday, September 2, 2011
23
EM Summary
• Local hill-climbing of (log) likelihood
function
• Uses point-estimates of z, μ, and σ (ML)
• Searches space of:
assignment (z)
J. Scholz (RIM@GT)
Friday, September 2, 2011
x
09/02/2011
μ
x
σ
24
Relation to DPMM?
•
Why such detail?
•
Because it anticipates our approach to
solving the “how many components?”
problem
•
The Gibbs sampler we’ll use may look
different from this hill climbing algorithm,
but searches the same space (plus # of
components k too)!
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
25
Topics
• Review of Dirichlet Process Concepts &
Metaphors
• Running example: Density estimation with
mixture of gaussians
• Learning Gaussian Mixtures with EM
• Learning (infinite) Gaussian Mixtures with
MCMC (Gibbs Sampling)
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
26
Questions you should be thinking
about at this point
• Is it even possible to reframe the density
problem such that this DP stuff is relevant?
• If so, what does inference look like?
• Will our answer be different?
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
27
1) Can we combine a GMM with DP?
•
Yes! Just associate a component with each
particle in the DP
•
Generative approach:
1. Generate components by running the DP
2. Draw the parameters for each gaussian from H
•
H now gives a 2D output: µ and σ2
try it! >> Prelim 3.2
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
28
The Dirichlet Process Mixture Model
Dirichlet Process Mixture Models
•
•
We model a data set x1 , . . . , xn using the
following model:
A DPMM is the same as a regular GMM,
xi ∼ F (θi )
for i = 1, . . . , n
except we drawθ ∼
the
component
G
i
parameters from
a DP
G ∼ DP(α, H)
This model
letsθi isusa do
joint
inference
over
Each
latent
parameter
modelling
xi , while
2, but of
is theσunknown
distribution
parameters
not only µGand
α itselfover
(and
modelled using a DP.
therefore k)
H
!
G
"i
xi
This is the basic DP mixture model.
>> Demo 5.2 (later)
Yee Whye Teh (Gatsby)
J. Scholz (RIM@GT)
Friday, September 2, 2011
DP and HDP Tutorial
09/02/2011
Mar 1, 2007 / CUED
17 / 53
29
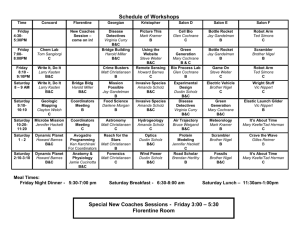
DPMM: controlling the density
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
30
DPMM: controlling the density
•
What happens when we play with our
parameters?
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
30
DPMM: controlling the density
•
What happens when we play with our
parameters?
•
alpha:
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
30
DPMM: controlling the density
•
What happens when we play with our
alpha=1, n_iter=100, n_samp=35
parameters?
•
alpha:
•
J. Scholz (RIM@GT)
Friday, September 2, 2011
bigger = more components
09/02/2011
30
DPMM: controlling the density
•
What happens when we play with our
alpha=1, n_iter=100, n_samp=35
parameters?
•
•
alpha:
•
# iterations:
J. Scholz (RIM@GT)
Friday, September 2, 2011
bigger = more components
09/02/2011
30
DPMM: controlling the density
•
What happens when we play with our
alpha=1, n_iter=100, n_samp=35
parameters?
•
•
alpha:
•
alpha=1, n_iter=1000, n_samp=35
# iterations:
•
J. Scholz (RIM@GT)
Friday, September 2, 2011
bigger = more components
more = more components
09/02/2011
30
DPMM: controlling the density
•
What happens when we play with our
alpha=1, n_iter=100, n_samp=35
parameters?
•
•
•
alpha:
•
alpha=1, n_iter=1000, n_samp=35
# iterations:
•
more = more components
# samples
J. Scholz (RIM@GT)
Friday, September 2, 2011
bigger = more components
09/02/2011
30
DPMM: controlling the density
•
What happens when we play with our
alpha=1, n_iter=100, n_samp=35
parameters?
•
•
•
alpha:
•
alpha=1, n_iter=1000, n_samp=35
# iterations:
•
more = more components
# samples
•
J. Scholz (RIM@GT)
Friday, September 2, 2011
bigger = more components
alpha=1, n_iter=1000, n_samp=350
more = more filled out histograms
09/02/2011
30
How do we use this?
•
•
Use DP as prior on the components
Critical part: condition on data
•
DP state is just a collection of components, so
we can ask “how likely is our data given our
parameters??”
•
This is a simple gaussian likelihood
calculation
•
Therefore we have conditional probabilities
required for Gibbs sampling
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
31
How
Gibbs
do we
Sampling
use this?
• Gibbs theory says that when this chain
mixes we effectively draw samples from the
posterior
• Posterior over what?
• Over anything we're sampling over,
which is anything that we care about
that we can derive a conditional
expression for (z, μ, σ, α)
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
32
Gibbs Sampling, the quick and dirty version
•
Gibbs sampling: a simulation scheme for sampling
from complicated distributions that we can’t
sample from analytically
•
Basic idea: do a random walk over parameter
space by resampling one variable at a time from
its conditional distribution, given the rest
•
Over time, the simulation spends time in states
in proportion to their posterior probability
•
Implies we have to derive likelihood
expressions for each parameter
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
33
The need for priors
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
34
The need for priors
•
Soon we’re going to try to compute µ,σ2, and α
from data, and we don’t want to overfit
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
34
The need for priors
•
Soon we’re going to try to compute µ,σ2, and α
from data, and we don’t want to overfit
•
We’ll put priors on both µ and σ2:
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
34
The need for priors
•
Soon we’re going to try to compute µ,σ2, and α
from data, and we don’t want to overfit
•
We’ll put priors on both µ and σ2:
•
J. Scholz (RIM@GT)
Friday, September 2, 2011
What’s the prior distribution for the mean of
a gaussian?
09/02/2011
34
The need for priors
•
Soon we’re going to try to compute µ,σ2, and α
from data, and we don’t want to overfit
•
We’ll put priors on both µ and σ2:
•
J. Scholz (RIM@GT)
Friday, September 2, 2011
What’s the prior distribution for the mean of
a gaussian? Another gaussian! [N(µ0,σ20]
09/02/2011
34
The need for priors
•
Soon we’re going to try to compute µ,σ2, and α
from data, and we don’t want to overfit
•
We’ll put priors on both µ and σ2:
•
What’s the prior distribution for the mean of
a gaussian? Another gaussian! [N(µ0,σ20]
•
What’s the prior distribution for the variance
of a gaussian?
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
34
The need for priors
•
Soon we’re going to try to compute µ,σ2, and α
from data, and we don’t want to overfit
•
We’ll put priors on both µ and σ2:
•
What’s the prior distribution for the mean of
a gaussian? Another gaussian! [N(µ0,σ20]
•
What’s the prior distribution for the variance
of a gaussian?
•
Are they independent?
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
34
The need for priors
•
Soon we’re going to try to compute µ,σ2, and α
from data, and we don’t want to overfit
•
We’ll put priors on both µ and σ2:
•
What’s the prior distribution for the mean of
a gaussian? Another gaussian! [N(µ0,σ20]
•
What’s the prior distribution for the variance
of a gaussian? Gamma(α,β)
•
Are they independent?
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
34
The need for priors
•
Soon we’re going to try to compute µ,σ2, and α
from data, and we don’t want to overfit
•
We’ll put priors on both µ and σ2:
•
What’s the prior distribution for the mean of
a gaussian? Another gaussian! [N(µ0,σ20]
•
What’s the prior distribution for the variance
of a gaussian? Gamma(α,β)
•
Are they independent?
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
No! (why?)
34
The need for priors
•
Soon we’re going to try to compute µ,σ2, and α
from data, and we don’t want to overfit
•
We’ll put priors on both µ and σ2:
•
What’s the prior distribution for the mean of
a gaussian? Another gaussian! [N(µ0,σ20]
•
What’s the prior distribution for the variance
of a gaussian? Gamma(α,β)
•
Are they independent?
No! (why?)
What would happen
without priors on μ and σ?
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
34
The need for priors
•
Soon we’re going to try to compute µ,σ2, and α
from data, and we don’t want to overfit
•
We’ll put priors on both µ and σ2:
•
What’s the prior distribution for the mean of
a gaussian? Another gaussian! [N(µ0,σ20]
•
What’s the prior distribution for the variance
of a gaussian? Gamma(α,β)
•
Are they independent?
What would happen
without priors on μ and σ?
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
No! (why?)
....It’d be jumpy!
34
2
osterior 4.
we1get
inverse
Gamma:
finition
/ σanother
is usually
called
the precision and is denoted by τ
� to put a �
�Now, we1want
prior on µ and σ 2 together. We could simply mu
β
+previous
(xitwo
− µ)
−(α+ n
−1
2
2 combination
2 mean
)
in
the
sections,
implicitly assuming µ and σ 2 are indepen
2
posterior mean isPusually
a
convex
of
the
prior
and
the MLE.
(σ | α, β) ∝ (σ )
exp −
σ 2 get a conjugate prior. One way to see this is that if w
we would not
� to theand
according
graphical
model
in Figure 1, we find that, conditioned
posterior precision is, in this case, the sum of the�prior
precision
the data
precision
βpost
2 −αpost −1
by a conjugate pr
∝ (σ )
exp −are,2in fact, dependent and this should be expressed(14)
τpost = τprior +στdata
A posterior expression for the mean
7. If xi | µ,our
σ2 ∼
N (µ,so
σ 2far:
) i.i.d.and σ 2 ∼ IG(α, β). Then:
summarize
results
�
�
2
2
�
mma 5. Assume x | µ2 ∼ N (µ, σ ) and µ ∼ N (µ0 , σn0 ). Then:
1
σ | x 1 , x2 , · · �
· , xn ∼ IG α + , β +
(xi − µ) � �
�
−1
2σ 2
2
σ02
1
1
µ|x ∼ N
x + 2
µ0 ,
+ 2
σ 2 + σ02
σ + σ02
σ02
σ
parametrize in terms of precisions, the conjugate prior is a Gamma distribution.
•
α
µ0
β
σ02
Updating the mean:
•
µ
σ2
x
β
Notice
it’s
a
weighted
combination
τ | α, β for
∼ Ga(α,
β)
P (τ | α,
τ α−1 exp (−τ β)
(15)
Posterior
multiple
measurements
(nβ)≥=1)
Γ(α)
We
will
use
the following prior distribution which, as we will show, is c
of the observed value and the
is: posterior update for multiple measurements. We could adapt our previousxderivation,
wposterior
look at the
| µ, τ ∼ N (µ,but
τ ) i.i.d.
prior
mean
� the� multivariate
��of Lemma 2. Instead
would be tedious since we would have to use
version
µ | τ ∼ we
N (µwill
, n τ)
�
α
Figure 1: µ and σ 2 are dependent conditio
i
0
0
�
1
α+ n
−1
(
)
2
uce the problem toPthe
with
sample
x̄ =
( µ)xi )/n as the new variable.
(τ | univariate
α, β) ∝ τ case,
expthe−τ
β +mean (x
i−
τ ∼ (16)
Ga(α, β)
2
�
�
2
σ
2
x
|
µ
∼
N
(µ,
σ
) i.i.d.
⇒ x̄ | µ ∼ N µ,
(10)
i
8. If xi | µ, τ ∼ N (µ, τ ) i.i.d.and τ ∼ Ga(α,
β). Then:
n
3.1 Posterior
�
�
�
�
�
n� 1
1
1
| x,µ)
τ . This is the simpler part, as we can use Lemma 8:
τ
|
x
,
x
,
·
·
·
,
x
∼
Ga
α
+
+
(x
2 µ
i−
P (x1 , x2 , · · ·1 , x2n | µ) ∝µn exp − 22 , βFirst
(xi2look
− µ)at
�
σ
2σ
nτ
n0 τ
�
�
µ
|
x,
τ
∼
N
x̄
+
µ0 ,
�
�
�
�should prefer both: nτ + n τ
1 precisions?
9. Should we prefer working with variances or
We
nτ
+
n
τ
0
0
∝µ exp − 2
x2i − 2µ
xi + nµ2
2σ
� n �
�at τ | x. We
� getnthis by expressing
�
Next, look
the joint density P (τ, µ |
�
iances add when we marginalize∝ exp −
2
2
−2µx̄ + µ
∝µ exp − 2try
(x̄ −it!
µ) >> Prelim 4.1-3
µ
2
P (τ, µ | x) ∝ P (τ ) · P2σ
(µ | τ ) · P (x | τ, µ)
2σ
� n τ
�
� τ�
cisions add when we condition ∝ P (x̄ | µ)
0
(11)
α−1
−βτ
1/2
2
n/2
µ
J. Scholz (RIM@GT)
09/02/2011 ∝ τ e τ exp − (µ − µ0 ) τ exp −35
•
Updating the variance:
Friday, September 2, 2011
2
2
What have we accomplished so far?
• Not too much, actually. We turned EM in
to a sampling algorithm to get a posterior
on μ and σ, but we’re not taking advantage
of the dirichlet prior yet!
• To use the DP, we need to be resampling
α too!
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
36
conditional prior for a single indicator given all the others; this is easily obtained from
Theeq.
latter
density
not of standard
it can beindicator
shown that p(log(β)|s
(12)
byiskeeping
all form,
but abutsingle
fixed: 1 , . . . , sk , w)
is log-concave, so we may generate independent samples from the distribution for log(β)
using the Adaptive Rejection Sampling (ARS) technique [Gilks & Wild, 1992], and transn−i,j + α/k
form these to get values for β.
p(ci = j|c−i , α) =
,
(13)
1+α
The mixing proportions, πj , are given a symmetric Dirichlet (also knownnas−
multivariate
beta) prior with concentration parameter α/k:
where the subscript −i indicates all indexes except
i and n−i,j is the number of observak
� α/k−1
Γ(α) component
tions,p(π
excluding
y
,
that
are
associated
with
The posteriors for the indicators
i
πj
, j. (10)
1 , . . . , πk |α) ∼ Dirichlet(α/k, . . . , α/k) =
k
Γ(α/k) j=1
A posterior expression for alpha
•
are derived in the next section.
We place a vague gamma prior on alpha (makes sense,
since all we know is that it’s greater than zero) parameter α:
where the mixing proportions must be positive and sum to one. Given the mixing proporLastly,
vague
prior of
inverse
shape
putdistribution
on the of
concentration
tions,
the priora for
the occupation
numbers,
nj , isGamma
multinomial
and theisjoint
the indicators becomes:
�
�
−1
−3/2
p(α )�
exp − 1/(2α) .
k∼ G(1, 1) =⇒
np(α) ∝ α
�
nj
p(c1 , . . . , cn |π1 , . . . , πk ) =
πj ,
nj =
δKronecker (ci , j).
(11)
•
j=1
(14)
i=1
We derive a likelihood expression for α:
Using the standard Dirichlet integral, we may integrate out the mixing proportions and
write the prior directly in terms of the indicators:
�
p(c1 , . . . , cn |α) = p(c1 , . . . , cn |π1 , . . . , πk )p(π1 , . . . , πk )dπ1 · · · dπk
(12)
Γ(α)
=
Γ(α/k)k
� �
k
n +α/k−1
πj j
dπj
j=1
k
Γ(α) � Γ(nj + α/k)
=
.
Γ(n + α) j=1 Γ(α/k)
In order to be able to use Gibbs sampling for the (discrete) indicators, ci , we need the
conditional prior for a single indicator given all the others; this is easily obtained from
eq. (12) by keeping all but a single indicator fixed:
•
simply
to obtain
posterior:
be derived fromMultiply
eq. (12), and
which
together
with thethe
prior
from
p(ci = j|c−i , α) =
n−i,j + α/k
,
n−1+α
(13)
�
�
number of observaα
exp − 1/(2α)
−i,j is the Γ(α)
Γ(α)
yi , that
,tions, excluding
p(α|k,
n)are∝associated with component j. The posteriors for the. indicators
(15)
+ α) are derived in the next section.
Γ(n + α)
k−3/2
where the subscript −i indicates all indexes except i and n
Lastly, a vague prior of inverse Gamma shape is put on the concentration parameter α:
�
�
−1
−3/2
p(α ) ∼ G(1, 1) =⇒ p(α) ∝ α
exp − 1/(2α) .
(14)
posterior for α depends only on number of observations, n, and
, k, and not on how the observations are distributed among the
J.p(log(α)|k,
Scholz (RIM@GT)
09/02/2011
onFriday,
n)
is
log-concave,
so
we
may
efficiently generate
September 2, 2011
37
conditional prior for a single indicator given all the others; this is easily obtained from
Theeq.
latter
density
not of standard
it can beindicator
shown that p(log(β)|s
(12)
byiskeeping
all form,
but abutsingle
fixed: 1 , . . . , sk , w)
is log-concave, so we may generate independent samples from the distribution for log(β)
using the Adaptive Rejection Sampling (ARS) technique [Gilks & Wild, 1992], and transn−i,j + α/k
form these to get values for β.
p(ci = j|c−i , α) =
,
(13)
1+α
The mixing proportions, πj , are given a symmetric Dirichlet (also knownnas−
multivariate
beta) prior with concentration parameter α/k:
where the subscript −i indicates all indexes except
i and n−i,j is the number of observak
� α/k−1
Γ(α) component
tions,p(π
excluding
y
,
that
are
associated
with
The posteriors for the indicators
i
πj
, j. (10)
1 , . . . , πk |α) ∼ Dirichlet(α/k, . . . , α/k) =
k
Γ(α/k) j=1
A posterior expression for alpha
•
are derived in the next section.
We place a vague gamma prior on alpha (makes sense,
since all we know is that it’s greater than zero) parameter α:
where the mixing proportions must be positive and sum to one. Given the mixing proporLastly,
vague
prior of
inverse
shape
putdistribution
on the of
concentration
tions,
the priora for
the occupation
numbers,
nj , isGamma
multinomial
and theisjoint
the indicators becomes:
�
�
−1
−3/2
p(α )�
exp − 1/(2α) .
k∼ G(1, 1) =⇒
np(α) ∝ α
�
nj
p(c1 , . . . , cn |π1 , . . . , πk ) =
πj ,
nj =
δKronecker (ci , j).
(11)
•
j=1
(14)
i=1
We derive a likelihood expression for α:
Using the standard Dirichlet integral, we may integrate out the mixing proportions and
write the prior directly in terms of the indicators:
�
p(c1 , . . . , cn |α) = p(c1 , . . . , cn |π1 , . . . , πk )p(π1 , . . . , πk )dπ1 · · · dπk
(12)
Γ(α)
=
Γ(α/k)k
� �
k
n +α/k−1
πj j
dπj
j=1
k
Γ(α) � Γ(nj + α/k)
=
.
Γ(n + α) j=1 Γ(α/k)
Ugh... thanks Rasmussen
In order to be able to use Gibbs sampling for the (discrete) indicators, ci , we need the
conditional prior for a single indicator given all the others; this is easily obtained from
eq. (12) by keeping all but a single indicator fixed:
•
simply
to obtain
posterior:
be derived fromMultiply
eq. (12), and
which
together
with thethe
prior
from
p(ci = j|c−i , α) =
n−i,j + α/k
,
n−1+α
(13)
�
�
number of observaα
exp − 1/(2α)
−i,j is the Γ(α)
Γ(α)
yi , that
,tions, excluding
p(α|k,
n)are∝associated with component j. The posteriors for the. indicators
(15)
+ α) are derived in the next section.
Γ(n + α)
k−3/2
where the subscript −i indicates all indexes except i and n
Lastly, a vague prior of inverse Gamma shape is put on the concentration parameter α:
�
�
−1
−3/2
p(α ) ∼ G(1, 1) =⇒ p(α) ∝ α
exp − 1/(2α) .
(14)
posterior for α depends only on number of observations, n, and
, k, and not on how the observations are distributed among the
J.p(log(α)|k,
Scholz (RIM@GT)
09/02/2011
onFriday,
n)
is
log-concave,
so
we
may
efficiently generate
September 2, 2011
37
conditional prior for a single indicator given all the others; this is easily obtained from
Theeq.
latter
density
not of standard
it can beindicator
shown that p(log(β)|s
(12)
byiskeeping
all form,
but abutsingle
fixed: 1 , . . . , sk , w)
is log-concave, so we may generate independent samples from the distribution for log(β)
using the Adaptive Rejection Sampling (ARS) technique [Gilks & Wild, 1992], and transn−i,j + α/k
form these to get values for β.
p(ci = j|c−i , α) =
,
(13)
1+α
The mixing proportions, πj , are given a symmetric Dirichlet (also knownnas−
multivariate
beta) prior with concentration parameter α/k:
where the subscript −i indicates all indexes except
i and n−i,j is the number of observak
� α/k−1
Γ(α) component
tions,p(π
excluding
y
,
that
are
associated
with
The posteriors for the indicators
i
πj
, j. (10)
1 , . . . , πk |α) ∼ Dirichlet(α/k, . . . , α/k) =
k
Γ(α/k) j=1
A posterior expression for alpha
•
are derived in the next section.
We place a vague gamma prior on alpha (makes sense,
since all we know is that it’s greater than zero) parameter α:
where the mixing proportions must be positive and sum to one. Given the mixing proporLastly,
vague
prior of
inverse
shape
putdistribution
on the of
concentration
tions,
the priora for
the occupation
numbers,
nj , isGamma
multinomial
and theisjoint
the indicators becomes:
�
�
−1
−3/2
p(α )�
exp − 1/(2α) .
k∼ G(1, 1) =⇒
np(α) ∝ α
�
nj
p(c1 , . . . , cn |π1 , . . . , πk ) =
πj ,
nj =
δKronecker (ci , j).
(11)
•
j=1
(14)
i=1
We derive a likelihood expression for α:
Using the standard Dirichlet integral, we may integrate out the mixing proportions and
write the prior directly in terms of the indicators:
�
p(c1 , . . . , cn |α) = p(c1 , . . . , cn |π1 , . . . , πk )p(π1 , . . . , πk )dπ1 · · · dπk
(12)
Γ(α)
=
Γ(α/k)k
� �
k
n +α/k−1
πj j
dπj
j=1
Ugh... thanks Rasmussen
k
Γ(α) � Γ(nj + α/k)
=
.
Γ(n + α) j=1 Γ(α/k)
In order to be able to use Gibbs sampling for the (discrete) indicators, ci , we need the
conditional prior for a single indicator given all the others; this is easily obtained from
eq. (12) by keeping all but a single indicator fixed:
•
simply
to obtain
posterior:
be derived fromMultiply
eq. (12), and
which
together
with thethe
prior
from
p(ci = j|c−i , α) =
n−i,j + α/k
,
n−1+α
(13)
Says that alpha depends only
�
�
number of observaα
exp − 1/(2α)
−i,j is the Γ(α)
Γ(α)
on the number of
tions,
excluding
y
,
that
are
associated
with
component
j.
The
posteriors
for
the
indicators
i
,
p(α|k,
n) ∝
. (15)
components and data points,
+ α) are derived in the next section.
Γ(n + α)
k−3/2
where the subscript −i indicates all indexes except i and n
Lastly, a vague prior of inverse Gamma shape is put on the concentration parameter α:
�
�
−1
−3/2
p(α ) ∼ G(1, 1) =⇒ p(α) ∝ α
exp − 1/(2α) .
(14)
posterior for α depends only on number of observations, n, and
, k, and not on how the observations are distributed among the
J.p(log(α)|k,
Scholz (RIM@GT)
09/02/2011
onFriday,
n)
is
log-concave,
so
we
may
efficiently generate
September 2, 2011
and not their distribution!
37
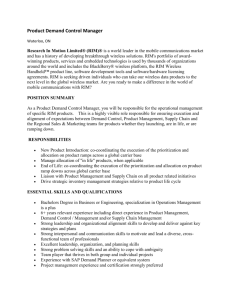
What’s all this math actually saying?
• That to update α, all we need to know is
the number of data points n and clusters k
• Larger values of n and k are associated with
larger values of α (duh)
• Lets see: (>> prelim 4.5)
n=40,k=10
J. Scholz (RIM@GT)
Friday, September 2, 2011
n=40,k=25
09/02/2011
n=60,k=25
38
Gibbs
Putting
foritthe
together
DPMM
•
Gibbs Sampling for the DPMM:
•
Our main loop follows this same pattern:
1. for i=1→n: resample all indicators Zi
2. for j=1→k: resample all component
parameters θj
3. resample α
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
39
Gibbs
Putting
foritthe
together
DPMM
•
Gibbs Sampling for the DPMM:
•
Our main loop follows this same pattern:
1. for i=1→n: resample all indicators Zi
2. for j=1→k: resample all component
parameters θj
3. resample α
Look familiar?? Just like EM, except we’re
doing sampling, and we included alpha!
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
39
Gibbs for the DPMM
•
Our specific approach to sampling is a block-gibbs
approach described by Neal (2000)
•
First, our goal is to sample:
•
Z (a nx1 vector of assignments of data points to
components*)
•
•
θ (a Kx2 matrix of gaussian means and variances)
α (the scalar DP concentration parameter)
* this implies k as well
J. Scholz (RIM@GT)
Friday, September 2, 2011
** this is not actually the full version discussed by Rasmussen (2000). There he included normal
and gamma priors on the hyperparameters u0, p0, a0, b0, which I chose to ignore for simplicity.
09/02/2011
40
DPMM Results
s=1...n
Draw samples 1...
through n
See for yourself:
>> Demo 5.2 (finally!)
* Can visualize posterior on θ too, but didn’t bother here
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
41
DPMM + MCMC Summary
• Random walk algorithm (not hill climbing)
• Gives samples of posterior over (w, μ, σ, α)
• Searches space of:
assignment (Z)
J. Scholz (RIM@GT)
Friday, September 2, 2011
x
μ
09/02/2011
x
σ
x
α
42
EM+GMM vs. GPMM
•
•
•
What are advantages of EM?
•
•
fast
soft component-assignment
What are advantages of DPMM?
•
•
Doesn’t depend critically on any user-set parameters
Not a hill-climbing method
Use EM when you know K (and what a good answer
looks like), use GPMM when finding K is interesting, or
you simply don’t have a clue
J. Scholz (RIM@GT)
Friday, September 2, 2011
09/02/2011
43