Nonlinear Vibration-Interaction Metric for Health Assessment of Helicopter Drivetrain Systems
advertisement

Nonlinear Vibration-Interaction Metric for Health
Assessment of Helicopter Drivetrain Systems
Mohammed A. Hassan*, Dr. Yong-June Shin*, Dr. Abdel E. Bayoumi†, Dr. Joshua Tarbutton†,
MG. Les Eisner††, and Dr. Jerry Higman†††
*
Department of Electrical
Engineering,
University of South Carolina,
Columbia, SC, USA
†
Department of Mechanical
Engineering,
University of South Carolina,
Columbia, SC, USA
Abstract—in this paper, concept of cross-bispectrum is used to
investigate and model vibration interaction due to nonlinearities
in faulted drive shafts in an AH-64 helicopter. Most of the
currently available vibration-monitoring tools are built around
auto- and cross-power spectral analyses which have limited value
in detecting frequency correlations higher than first order.
Studying higher order correlations provides more information
about the mechanical system which helps in building more
accurate diagnostic model using the same collected vibration
data. Based on cross-bispectrum as higher order spectral
analysis, health conditions of rotating shafts are assessed by
studying quadratic nonlinear correlation between two vibration
signals collected at the bearing supporting the shafts. Vibration
data are gathered from dedicated condition based maintenance
experimental helicopter drive-train simulating different shaft
conditions, namely; baseline case, shaft misalignment, shaft
imbalance, and combination of misalignment and imbalance. For
each of these settings, the experiment is repeated three times
using different hanger bearing articles, making a grand total of
twelve experiment runs. This work is targeting the development
of health indicators based on higher order spectra (HOS) for
more effective condition based maintenance (CBM) programs.
Index Terms—Higher Order Spectra, HOS, Cross-bispectrum,
Nonlinear Phase Coupling, Condition Based Maintenance, CBM.
I. INTRODUCTION
Condition based maintenance (CBM) is a practice in which
maintenance actions for mechanical systems are taken based on
actual health conditions of their components [1]. This is
achieved by continuously monitoring critical components in
the system through collecting and processing various types of
application-dependent signals including vibration [2][3],
acoustic emission [4], and temperature. Traditional time based
maintenance (TBM), on the other hand, involves replacing
existing parts after a certain time period or a certain number of
operational hours. For more than a decade, University of South
Carolina (USC) has been working closely with the South
Carolina Army National Guard (SCARNG) and US Army
Aviation Engineering Directorate (AED) in a number of
important projects that were directed at reducing the Army
Aviation costs and increasing operational readiness by shifting
from the TBM to the innovative CBM practice [5][6][7]. These
efforts expanded into a fully matured CBM research center at
the USC which hosts several aircraft component test stands in
support of current military CBM objectives including the
development of comprehensive and accurate diagnostic
PresentedattheAHSAirworthiness,CBM,andHUMSSpecialists’Meeting,
Huntsville, AL, Feb 11-13, 2013. Copyright © 2013 by the American
Helicopter Society International, Inc. All rights reserved.
††
Deputy Adjutant General,
South Carolina National
Guard, USA
†††
Apache PMO, Chief,
Aircraft Branch, TMD U.S.
Army Program Executive
Office, Aviation
algorithms. The successes to date in achieving CBM goals have
resulted in the large-scale deployment of increasingly useful
health monitoring systems such as Health- and UsageMonitoring Systems (HUMS) and Modern Signal Processing
Unit (MSPU), a vibration data acquisition and signalprocessing equipment installed in the rotorcrafts participating
in the VMEP program [8][9]. All test stands at USC utilize two
data acquisition systems; (1)- current in-flight MSPU, (2)- a
specialized laboratory data acquisition system (DAQ),
recording torque, speed, temperature, vibration, and capable of
electrical signature, and acoustic emission monitoring.
Vibration analysis is the most common and popular
technique used in the field of condition monitoring of rotating
machinery [2][3]. When two vibration signals are
simultaneously collected, linear relationship between them is
described by the cross-correlation. The Fourier transform of the
cross-correlation is the classical cross-power spectrum which
can be used to characterize linearity of the system under study,
as will be discussed in section II.A. Linear spectral analysis
techniques of the vibration signals, based on auto- and crosspower spectra, are used as common tools of rotating
components diagnostics. However, they have limited value
when various spectral components interact with one another
due to some nonlinear or parametric processes. In such a case,
higher order correlation, and their Fourier transforms, Higher
Order Spectra (HOS), are used to characterize nonlinearities in
the vibration signals [10]. When various spectral components
interact with one another due to second order nonlinearities,
new spectral components are formed which are phase coupled
with the permanent interacted frequencies. Bispectrum, as will
be discussed in section II.B, describes this correlation between
the source and the result of interaction process in twodimensional frequency space. Since faulted components are
often related to nonlinear phenomena, bispectrum can provide
more diagnostic information than the classical power spectra.
In this paper we use the cross-bispectrum as a signal
processing tool to investigate quadratic nonlinear relationship
between two vibration signals simultaneously collected from
the forward and afterward hanger bearing positions in an AH64 helicopter tail rotor drive train. Most of the current practice
involve monitoring the power spectral peak at the first and
second harmonics of the rotating shaft (first and second shaft
orders) to detect shaft misalignment and imbalance [11][12].
This implicitly models the shaft, during these faults, as linear
system. In our analysis, we assume nonlinear behavior of the
rotating shafts during the fault. Thus, nonlinearity coupling
coefficient between the first and second harmonics of the
rotating shafts is used as condition metric to distinguish
between different seeded shaft faults compared to baseline
case, namely 1)- shaft misalignment, 2)- shaft imbalance , and
3)- combination of shaft misalignment and imbalance ; as will
be described in section III. Technical approach is presented in
section II. Results of this study are discussed in section IV
followed by conclusion in section V.
II. CROSS-BISPECTRUM AND NONLINEAR VIBRATION
COUPLING
A. Linear correlation and linear coupling between frequencies
Vibration signals from mechanical systems are realizations
of random processes. Just as random variables are
characterized by certain expected values or moments, random
processes are characterized by their mean values, correlation
function, and various higher order correlation functions.
Alternatively, random processes may be characterized by the
Fourier transforms of the various order correlation function
[13]. For a zero-mean stationary continuous vibration signal
x(t), the first order (linear) autocorrelation function Rxx(τ) and
the auto-power spectrum SXX(f) are Fourier transform pairs
according to Wiener-Khinchin theorem [14], and can be
estimated by (1) and (2) as follows;
(1)
Rxx ( ) E{x(t ) x* (t )}
S XX ( f ) E{ X ( f ) X * ( f )} E{ X ( f ) }
2
H( f )
*
C XY
(f)
E{| X ( f ) |2 }
(6)
B. Quadratic nonlinearity coupling between frequencies
Auto-bispectrum SXXX(f1,f2) is the Fourier transform of the
second-order correlation function Rxxx(τ1, τ2), as given in (7)
and (8), and it describes second-order statistical dependence
between spectral components of signal x(t)[15].
(7)
Rxxx (1 , 2 ) E{x(t 1 ) x(t 2 ) x* (t )}
S XXX ( f1 , f 2 ) E{X ( f1 ) X ( f 2 ) X * ( f1 f 2 )}
(8)
The advantage of bispectrum over linear power spectral
analysis is its ability to characterize quadratic nonlinearities in
monitored systems. One of the characteristics of nonlinearities
is that various frequencies“mix”toformnew combinations of
“sum” and “difference” frequencies, as depicted in Figure 1.
An important signature to detect nonlinearity is based on the
fact that there exists a phase coherence, or phase coupling,
between the primary interacting frequencies and the resultant
new sum and difference frequencies [15]. The bispectrum
describes this correlation between the three waves (interacting
frequencies (f1 and f2), and the result (f1+f2) of nonlinear
process) in two-dimensional frequency space (f1-f2). The
definition of the bispectrum in (8) implies that SXXX(f1,f2) will
be zero unless phase coherence is present between the three
frequencies f1, f2, and f1 + f2.
(2)
E{.} denotes a statistical expected value operator,
X(f) is the Fourier transform of x(t ) , and superscript ∗ denotes
where
a complex conjugate.
Auto-power spectrum, SXX(f), is one of the most commonly
used tools in vibration spectral analysis[2][3], and it describes
how the mean square power of the vibration signal is
distributed over single-frequency space.
When two vibration signals are collected simultaneously,
cross-power spectrum Rxy(τ) is a useful function which
investigates the linear relationship between the two signals x(t)
and y(t), as given in equation (3). The Fourier transform of the
cross-correlation function is the cross-power spectrum CXY(f)
which is a useful tool whose magnitude |CXY(f)| shows
common frequencies in the spectrum of the two signals, and its
phase xy measures the phase difference between them.
Rxy ( ) E{x(t ) y* (t )}
CXY ( f ) E{ X ( f )Y ( f )} Cxy ( f ) e
*
(3)
j XY
(4)
Assuming that X(f) is an input signal to linear system,
output signal Y(f) is linearly coupled to X(f) in frequency
domain by the following relation;
(5)
Y( f ) H( f )X ( f )
where, H ( f ) is the linear transfer function of the system.
Therefore, assuming linear system with unknown
characteristics, by substituting from (5) in (4), the linear
coupling coefficient (transfer function) at any particular
frequency can be calculated as follows;
Figure 1: Effect of nonlinear system on frequency mix
(interaction) of input signals
Similarly, Cross-bispectrum XBispXXY ( f1 , f 2 ) is the Fourier
transform of the cross-correlation function as given in (9) and
(10) as follows [13][16];
(9)
Rxxy (1 , 2 ) E{x(t 1 ) x(t 2 ) y* (t )}
XBispXXY ( f1 , f 2 ) E{X ( f1 ) X ( f 2 )Y * ( f1 f 2 )} (10)
Cross-bispectrum given in (10) investigates the nonlinear
coupling between any two frequency components, f1 and f2, in
signal X(f) that interact, due to quadratic nonlinearity, to
produce a third frequency, f1+f2, at another signal Y(f). In fact,
cross-bispectrum will be evaluated digitally. Sampling theory
implies that all f1, f2, and f3=f1+f2 must be less than or equal to
fS
where fS is the sampling frequency. Thus, XBispXXY(f1,f2) is
2
usually plotted in the sum-frequency region denoted by “Σ”
and the difference-frequency region “∆”, as shown in Figure 2.
Figure 2: Region of computation of the crossbispectrum
Figure 3: Flow diagram for digital estimation of the
nonlinearity coupling coefficient, ANLC
By analogy to linear transfer function in equation (6), we
propose a metric based on the cross-bispectrum that measures
the quadratic nonlinearity coupling between two signals. Thus,
assuming that frequency component at Y(f1+f2) in generated by
quadratic nonlinear coupling between X(f1) and X(f2),
Y(f1+f2)=ANLC(f1,f2)X(f1)X(f2), the nonlinear coupling coefficient
between the two frequencies f1 and f2 can be calculated as
follows;
ANLC ( f1 , f 2 )
XBisp*XXY ( f1 , f 2 )
E{| X ( f1 ) X ( f 2 ) |2 }
(11)
Using average over ensemble of M realizations to estimate
the expected value operators in equation (11), ANLC can be
estimated directly from the discrete Fourier transform of
sampled versions of x(t) and y(t) as follows;
ANLC (l , k )
1
M
M
X l X k Y l k
i 1
1
M
*
i
M
i 1
*
i
i
X i l X i k
(12)
2
Nonlinearity coupling coefficient, ANLC, is two-dimensional
complex matrix calculated for the whole same bi-frequency
space as cross-bispectrum shown in Figure 2. Once coupling
frequency coordinate points of interest are determined,
computational power and memory can be saved by limiting the
calculation to only those coordinate-points. Flow diagram for
digital estimation of ANLC(l,k) is shown in Figure 3.
Based on cross-bispectrum analysis, section IV presents
applications of the proposed nonlinearity measure to real-world
vibration data obtained from a dedicated condition based
maintenance experimental helicopter drive-train. The
experiment setup and the vibration data that is used in the
analysis are described in the following section.
III. EXPERIMENT SETUP AND VIBRATION DATA DESCRIPTION
A. TRDT test stand
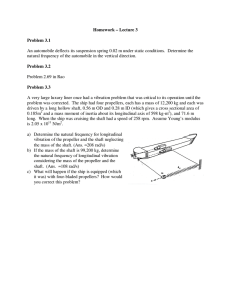
The CBM center at the USC has a full-scale AH-64
helicopter tail rotor drive-train (TRDT). The TRDT emulates
the complete tail rotor drive train from the main transmission
tail rotor takeoff to the tail rotor swash plate assembly, as
shown in Figure 4. All drive train parts on the test stand are
actual aircraft hardware. The structure, instrumentation, data
acquisition systems, and supporting hardware are in accordance
with military standards. As shown in Figure 4, the multi-shaft
drive train consists of four shafts. Three of these shafts,
denoted as shafts #3, #4 and # 5, lead from main transmission
power take off point to the intermediate gearbox (IGB). These
shafts are supported by two hanger bearings denoted as
forward (FHB) and afterward (AHB), and flexible couplings at
shaft joining points. The fourth shaft is installed on the vertical
stabilizer between the IGB and the tail rotor gearbox (TRGB).
The prime mover for the drive train is an 800hp AC induction
motor controlled by variable frequency drive. An absorption
motor of matching rating is used to simulate the torque loads
that would be applied by the tail rotor blade and it is controlled
by another variable frequency drive. The two motors work in
dynamometric configuration to from regenerative system for
energy saving.
(a)
(b)
Figure 4: Actual tail rotor drive train (TRDT) on the AH-64 in (a), and TRDT test stand at USC in (b)
B. Experiment settings and vibration data description
The data used in this study consist of 12 experiment runs
arranged in 4 sets of shaft settings taken with different shafts
alignment and balance. For each shaft setting, the experiment is
repeated 3 times using different hanger bearing articles in the
aft position of the TRDT test stand. In order to keep data
organized, a naming convention is followed as summarized in
Table 1. The first digit in the test number represents the shaft
setting and varies from 0 to 3; where 0 is used to represent
baseline case, 1 for unbalanced case, 2 for misalignment, and 3
for a combined case of both shaft imbalance and misalignment.
The remaining of the test number consists of the serial number
of the hanger bearing used at the aft position as follows: S/N:
0316, S/N: 0321, S/N: 0373.
Table 1: Vibration data set and test numbers
Shaft settings
Test number
Baseline
“0”
Imbalance
“1”
Misalignment
“2”
Unbal./Misal.
“3”
Hanger bearing S/N
0316
0321
0373
00316
00321
00373
10316
10321
10373
20316
20321
20373
30316
40321
30373
The original configuration of the test stand uses balanced
drive-shafts straightly aligned as a baseline for normal
operations (case “0” in Table 1). Aligned-unbalanced shafts
(case “1” in Table 1) are tested under the condition of drive
shaft #4 is unbalanced by 0.135 oz-in, and drive shaft #5 is
unbalanced by 0.190 oz-in. Angular misalignment between
shafts (case “2” in Table 1) is tested where misalignment is
1.3° between the #3 drive shaft and the #4 and 1.3° between
the #4 and the #5 drive shaft. A combination of the last two
cases, imbalance -misalignment is also tested as indicated by
case“3”inTable 1.
During each experiment run, vibration data are collected
from the forward and aft hanger bearing positions (denoted as
FHB and AHB in Figure 4) once every two minutes during the
course of the thirty minute run, making total of 15 data
segments. Each data segment has 65536 data points collected at
sampling rate of 48kHz (fS) which results in data collection
time of approximately 1.31 sec per acquisition. Vibration
signals are collected during operation of the test stand at a
constant rotational speed of 4863 rpm (81.05 Hz) from the
prime mover, with a simulation of the output torque at 111
ft.lb. from the output motor. Rotational speed is the speed of
the input shafts and hanger bearings. Output torque is given by
the torque at the output of the tail rotor gearbox simulating
rotor operation while the torque applied to the input shafts and
hanger bearings is equal to 32.35 ft.lb.
IV. RESULTS AND DISCUSSION
In this section, unknown drive-shaft conditions are
characterized using the vibration signals collected at the
bearings supporting it. Using system identification approach
under the assumption that the shaft under study is a nonlinear
system, characteristics of this shaft can be studied using
equation (12), as discussed in section II.B. Vibration signals at
the FHB and AHB in Figure 4 are used as x(t) and y(t), and
algorithm in Figure 3 is followed to calculate the nonlinear
coupling between the forward and the afterward hanger
bearings’ vibrations. As mentioned in the previous section,
each experiment run has 15 data segments. In order to get
bigger set of signal realizations to estimate the expected value
operator by average over ensemble of M realizations, each data
segment is split into two, so we have total number of M=30
data segments with each segment has 32768 data points. This
results in frequency resolution equal to ∆f = 1.46Hz when
discrete Fourier transform is calculated using fast Fourier
transform (FFT) approach. In the following discussion, for
easier notation of frequency values, we will use “1SO, 2SO,
3SO,…”todenoteharmonicsoftheshaftfrequency(81.05Hz)
as“firstshaftorder,secondshaftorder,thirdshaftorder,…”.
Figure 5 shows the cross-bispectrum for all shaft settings
using vibration data set from hanger bearing with S/N 0321.
The baseline case (aligned-balanced) shown in Figure 5(a) has
the least nonlinearity among other cases where less frequency
interact with one another. Highest bispectral peaks exist at
the following coordinate points: (2SO,1SO), (3SO,3SO),
(3SO,1SO), and (4SO,-1SO).
(1SO,1SO)
(1SO,1SO)
(a) 00321 Baseline case
(1SO,1SO)
(c) 20321 Misaligned case
(b) 10321 Unbalanced case
(1SO,1SO)
(d) 30321 Unbalanced-Misaligned case
Figure 5: Cross-bispectrum between FHB and AHB vibration signals under different shaft settings
In the case of shaft imbalance shown in Figure 5(b),
increased frequency-interaction along 2SO frequency can be
observed; namely at the coordinate points of (2SO,2SO),
(2SO,1SO), and (2SO,-1SO). Another interesting observation
is the high bispectral peak at (1SO,1SO) compared to the
baseline case. It is important to note that this high peak at
(1SO,1SO) coordinate point clearly distinguishes all the faulted
cases (Figure 5(b:d)) from the baseline case (Figure 5(a)). Also,
the physical interpretation of this frequency coupling point
explains that part of the vibration power at the 2SO frequency,
which is used in conventional power spectral analysis to detect
shaft abnormalities [11][12], is generated due to quadratic
nonlinearity of the drive shaft causing interaction between 1SO
and itself . Therefore, for the two previously stated reasons,
although careful study of the whole cross-bispectrum may lead
to more nonlinear vibration signatures, we will focus our
attention to (1SO,1SO) coordinate point and we will use it to
evaluate the nonlinear coupling between the FHB and AHB
vibrations in all the experimental data set.
To compare results discussed above with the conventional
spectral analysis, magnitude plot of the cross-power spectrum
for the same data set is studied, as shown in Figure 6.
Magnitude of the vibration at the 3SO frequency is dominating
almost all the spectra, even the baseline case, in addition to
some other shaft orders varying from case to another. One
interesting observation is that magnitude of 2SO is higher in all
the faulted cases (Figure 6(b:d)) than the baseline case (Figure
6(a)). This frequency is the same one resulted from nonlinear
coupling between (1SO,1SO) in Figure 5. Thus, for all studied
cases, linear transfer function in equation (6) is estimated at
2SO frequency and compared to the nonlinear coupling in
equation (11) at the bi-frequency point (1SO,1SO), as
summarized in Table 2 and Table 3.
3SO
3SO
1SO
1SO
2SO
2SO
(a) 00321 Baseline case
(b) 10321 Unbalanced case
3SO
1SO
1SO
2SO
3SO
2SO
(c) 20321 Misaligned case
(d) 30321 Unbalanced-Misaligned case
Figure 6: Cross-power spectrum between FHB and AHB vibration signals under different shaft settings
Table 2: Linear coupling, H(2SO), for all shaft settings
SN 0321
Shaft
setting
SN 0316
SN 0373
average
phase
(deg.)
|H|
phase
(deg.)
|H|
phase
(deg.)
|H|
phase
(deg.)
BL (0)
0.047
65.46
0.403
84.49
0.294
68.87
72.94
UB (1)
0.251
94.81
0.293
67.49
0.268
82.88
81.73
MA (2)
0.276
80.51
0.416
66.68
0.225
46.82
64.67
UB/MA
(3)
0.259
22.57
0.166
200.45
0.337
66.13
96.38
Table 3: Nonlinear coupling, ANLC(1SO,1SO), for all
shaft settings
SN 0321
Shaft
setting
SN 0316
SN 0373
average
phase
(deg.)
|A|
phase
(deg.)
|A|
phase
(deg.)
|A|
phase
(deg.)
BL (0)
11.55
-66.68
109.17
-70.68
68.18
-61.36
-66.24
UB (1)
59.51
2.53
60.17
-26.86
50.32
-13.73
-12.69
MA (2)
53.46
174.48
78.37
160.22
74.01
234.54
189.74
UB/MA
(3)
32.10
55.42
37.37
16.57
109.05
7.87
26.62
In the case of linear coupling based on cross-power spectral
analysis, magnitude of the coupling (|H|) is used to detect the
faulted case while the phase of the coupling is used to
differentiate (diagnose) the different faulted cases.
Unfortunately, this rule for magnitude is satisfied only in the
case of SN 0321 among the three vibration data set studied in
this paper and summarized in Table 2. This is also true for the
magnitude of nonlinear coupling in Table 3. However, phase
results are more consistent in Table 3 than Table 2 for all the
studied cases under all shaft settings. Thus, phase of both linear
and nonlinear coupling will be used to compare between them
to evaluate the goodness of each in assessing health conditions
of the drive shafts. For example, phase of the nonlinear
coupling in the baseline case is -66.68o in the case of SN0321,
-70.68o in the case of SN0316, and -61.36o in the case of
SN0373. Average phase of the nonlinear coupling in the
baseline case from the three different SNs is -66.24o with
standard deviation 4.68o, as shown in Table 3. On the other
hand, phase of the linear coupling transfer function for the all
baseline cases, shown in Table 2, vary between 65.46o, 84.49o,
and 68.87o with average 72.94o and standard deviation 10.15o.
Careful study of all results summarized in Table 2 and
Table 3 indicates that using the phase of the proposed nonlinear
coupling metric is better than its counterpart from the
conventional linear transfer function for two main reason: First,
wider phase differences among cases relax the requirements on
setting the threshold values to distinguish different shaft cases,
which in turn decrease the probability of false alarm. Average
phase of nonlinear coupling metric for each shaft setting is
calculated using the three studied data set (SN0321, SN0316,
and SN0373). Average phases are summarized in the last
column of Table 3 and they are equal to -66.24o, -12.69o,
189.74o, and 26.62o for baseline, unbalanced, misaligned, and
unbalanced-misaligned cases, respectively, with minimum
phase difference between any two cases is greater than 39
degrees. On the other hand, average phase for linear transfer
function is 72.94o, 81.73o, 64.67o, and 96.38o for baseline,
unbalanced, misaligned, and unbalanced-misaligned cases,
respectively, with minimum phase difference between cases is
less than 9 degrees. Second reason is, in the case of nonlinear
metric in Table 3, there is no overlap among phase values of
different shaft settings, while there is overlap between values
of the linear metric in Table 2. To clarify this point, Figure 7
and Figure 8 are plotted. For each shaft setting, nonlinear
coupling metric is calculated from 10 data segments taken from
each SN data set and plotted next to each other. Phase of the
nonlinear phase coupling metric shows consistent results
around its average and does not overlap from shaft case to
another, as shown in Figure 8. On the other hand, phase of the
linear coupling metric overlap from one point to another as
well as from one SN to another, as shown in Figure 7.
Figure 7: Progress of the phase values for the linear
coupling metric, H(2SO)
V. CONCLUSION
In this paper, vibration interaction metric has been
proposed and used to assess health conditions of an AH-64
helicopter tail rotor drive shafts. The proposed metric is based
on cross-bispectrum analysis, which is the Fourier transform of
the second order correlation function. Nonlinear transfer
function has been derived from the cross-bispectrum in analogy
to the way linear transfer function is derived from cross-power
spectrum. Using system approach, vibration data collected at
the bearing supporting the drive shaft has been used as input
and output signals to characterize the unknown conditions of
the drive shaft system. Vibration at the second shaft order
(2SO) frequency has been used to compare between two
condition indicators that characterize the shaft condition using
two different approaches. Classical approach based on crosspower spectrum, on one hand, measures the first order
correlation (linear coupling) between the two vibration signals
at the 2SO frequency, H(2SO), and uses the coupling phase
difference to diagnose different fault conditions. On the other
hand, proposed approach in this paper measures the quadric
coupling between the two signals that result in 2SO frequency,
ANLC(1SO,1SO), and also uses the phase of the quadratic
coupling to diagnose different shaft faults.
Three different hanger bearings have been used to study
vibration data collected from four different shaft settings,
making grand total of twelve experiment runs. Among the three
data set used in this study, magnitude response of both linear
and nonlinear coupling was able to distinguish between the
four studied shaft settings in only one hanger bearing group.
However, using the phase of the proposed nonlinear coupling
has shown better capabilities in distinguishing the four studied
shaft settings than the conventional linear coupling. Phase of
the ANLC(1SO,1SO) metric has shown more consistent result
among the three studied bearing cases for each shaft setting
than what the phase of H(2SO) has done. It also has shown
wider phase difference between the studied cases without
overlap among them.
Clearly, additional work must be done to explore the
promise of using ANLC(1SO,1SO) metric as a shaft condition
indicator including: investigating nonlinear coupling among
different frequency values other than (1SO,1SO); consideration
of noise; expanding the population of studied cases using
actual filed data if possible, and study probability of false
alarm; and a detailed comparison to currently used condition
indicators to fully elucidate the advantages and limitations of
the proposed metric.
ACKNOWLEDGMENT
Figure 8: Progress of the phase values for the nonlinearity
coupling metric, ANLC(1SO,1SO)
This research is funded by the South Carolina Army
National Guard and United States Army Aviation and Missile
Command via the Conditioned-Based Maintenance (CBM)
Research Center at the University of South CarolinaColumbia. Also, this research is partially supported by the
Egyptian government under the Government Mission Program
for Mr. Mohammed Hassan.
REFERENCES
[1] A. K.S. Jardine, D. Lin, and D. Banjevic, “A review on
machinery diagnostics and prognostics implementing conditionbased maintenance,” Mechanical Systems and Signal
Processing, vol. 20, no. 7, pp. 1483-1510, Oct. 2006.
[2] P. D. Samuel, and D. J. Pines, “A review of vibration-based
techniques for helicopter transmission diagnostics,” Journal of
Sound and Vibration, vol. 282, no. 1-2, pp. 475-508, Apr. 2005.
[3] A. S. Sait, and Y. I. Sharaf-Eldeen, “A Review of Gearbox
Condition Monitoring Based on vibration Analysis Techniques
Diagnostics and Prognostics,”inRotatingMachinery,Structural
Health Monitoring, Shock and Vibration, Vol. 8, T. Proulx, Ed.
New York: Springer, pp. 307- 324, 2011.
[4] J. J. da Silva, A. M. Lima, F. H. Neff, and J. S. da Rocha Neto,
“Non-invasive fast detection of internal fouling layers in tubes
andductsbyacousticvibrationanalysis,”IEEE Transactions on
Instrumentation and Measurement, vol. 58, no. 1, pp. 108–114,
Jan. 2009.
[5] A. Bayoumi, W. Ranson, L. Eisner, and L.E. Grant, “Cost and
effectiveness analysis of the AH-64 and UH-60 on-board
vibrations monitoring system,”IEEEAerospaceConference,pp.
3921-3940, Mar. 2005.
[6] A. Bayoumi, and L. Eisner, “Transforming the US Army
through the Implementation of Condition-Based Maintenance,”
Journal of Army Aviation, May 2007.
[7] V. Blechertas, A. Bayoumi, N. Goodman, R. Shah, and YongJune Shin. “CBM Fundamental Research at the University of
South Carolina: A Systematic Approach to U.S. Army
Rotorcraft CBM and the Resulting Tangible Benefits,”
Proceedings of AHS International Specialists’ Meeting on
Condition Based Maintenance, Huntsville, AL, Feb. 2009.
[8] Damian Carr. ”AH-64A/D Conditioned Based Maintenance
(CBM) Component Inspection and Maintenance Manual Using
the Modernized Signal Processor Unit (MSPU) or VMU
(Vibration Management Unit),” Aviation Engineering
Directorate Apache Systems, Alabama, Tech. Rep., Oct. 2010.
[9] P. Grabill, T. Brotherton, J. Berry, and L. Grant,“TheUSArmy
and National Guard Vibration Management Enhancement
Program (VMEP): Data Analysis and Statistical Results,”
American Helicopter Society 58th Annual Forum, Montreal,
Cananda, June, 2002.
[10] M. A. Hassan, D. Coats, K. Gouda, Yong-June Shin, and A.
Bayoumi, “Analysis of Nonlinear Vibration-Interaction Using
Higher Order Spectra to Diagnose Aerospace System Faults,”
proceeding of the IEEE Aerospace Conference, pp.1-8, March
2012.
[11] C. Scheffer, P. Girdhar, “Practical Machinery Vibration
Analysis and PredictiveMaintenance,”2004.
[12] P.Grabill,J.Seale,D.Wroblewski,andT.Brotherton,“iTEDS:
the intelligent Turbine EngineDiagnosticSystem,”Proceedings
of 48 International Instrumentation Symposium, May 2002.
[13] B. Boashash, E. J. Powers, A. M. Zoubir, “Higher-Order
StatisticalSignalProcessing,”Wiley,1996.
[14] Leon W. Couch II, “Digital and Analog Communications
Systems (sixth ed.), New Jersey, Prentice Hall, pp. 406-409,
2001.
[15] Y.C.Kim,andE.J.Powers,“Digitalbispectralanalysisandits
application to nonlinear wave interactions,” IEEE Transactions
on Plasma Science, vol. 7, no. 2, pp. 120-131, July 1979.
[16] T. Kim, W. Cho, E. J. Powers, W. M. Grady, and A.
Arapostathis, “ASD system condition monitoring using cross
bicoherence,” 2007 IEEE electricship technologies symposium,
pp. 378-383, May 2007.