Forward-Backward Greedy Algorithms for General Convex Smooth Functions Abstract
advertisement

000
001
002
003
004
005
006
007
008
009
010
011
012
013
014
015
016
017
018
019
020
021
022
023
024
025
026
027
028
029
030
031
032
033
034
035
036
037
038
039
040
041
042
043
044
045
046
047
048
049
050
051
052
053
054
Forward-Backward Greedy Algorithms for General Convex Smooth Functions
over A Cardinality Constraint
Abstract
We consider forward-backward greedy algorithms for solving sparse feature selection problems with general convex smooth functions.
A state-of-the-art greedy method, the ForwardBackward greedy algorithm (FoBa-obj) requires
to solve a large number of optimization problems, thus it is not scalable for large-size problems. The FoBa-gdt algorithm, which uses the
gradient information for feature selection at each
forward iteration, significantly improves the efficiency of FoBa-obj. In this paper, we systematically analyze the theoretical properties of both
forward-backward greedy algorithms. Our main
contributions are: 1) We derive better theoretical
bounds than existing analyses regarding FoBaobj for general smooth convex functions; 2) We
show that FoBa-gdt achieves the same theoretical
performance as FoBa-obj under the same condition: restricted strong convexity condition. Our
new bounds are consistent with the bounds of
a special case (least squares) and fills a previously existing theoretical gap for general convex
smooth functions; 3) We show that the restricted
strong convexity condition is satisfied if the number of independent samples is more than k̄ log d
where k̄ is the sparsity number and d is the dimension of the variable; 4) We apply FoBa-gdt
(with the conditional random field objective) to
the sensor selection problem for human indoor
activity recognition and our results show that
FoBa-gdt outperforms other methods (including
the ones based on forward greedy selection and
L1-regularization).
1. Introduction
Feature selection has been one of the most significant issues
in machine learning and data mining. Following the success of Lasso (Tibshirani, 1994), learning algorithms with
Preliminary work. Under review by the International Conference
on Machine Learning (ICML). Do not distribute.
sparse regularization (a.k.a. sparse learning) have recently
received significant attention. A classical problem is to estimate a signal β ∗ ∈ Rd from a feature matrix X ∈ Rn×d
and an observation y = Xβ ∗ + noise ∈ Rn , under the
assumption that β ∗ is sparse (i.e., β ∗ has k̄ d nonzero
elements). Previous studies have proposed many powerful
tools to estimate β ∗ . In addition, in certain applications, reducing the number of features has a significantly practical
value (e.g., sensor selection in our case).
The general sparse learning problems can be formulated as
follows (Jalali et al., 2011):
β̄ := arg min : Q(β; X, y)
β
s.t. :
kβk0 ≤ k̄. (1)
where Q(β; X, y) is a convex smooth function in terms of β
such as the least square loss (Tropp, 2004) (regression), the
Gaussian MLE (or log-determinant divergence) (Ravikumar et al., 2011) (covariance selection), and the logistic
loss (Kleinbaum & Klein, 2010) (classification). kβk0 denotes `0 -norm, that is, the number of nonzero entries of
β ∈ Rd . Hereinafter, we denote Q(β; X, y) simply as
Q(β).
From an algorithmic viewpoint, we are mainly interested
in three aspects for the estimator β̂: 1) estimation error
kβ̂ − β̄k; 2) objective error Q(β̂) − Q(β̄); and 3) feature
selection error, that is, the difference between supp(β̂) and
F̄ := supp(β̄), where supp(β) is a feature index set corresponding to nonzero elements in β. Since the constraint
defines a non-convex feasible region, the problem is nonconvex and generally NP-hard.
There are two types of approaches to solve this problem in the literature. Convex-relaxation approaches replace `0 -norm by `1 -norm as a sparsity penalty. Such
approaches include Lasso (Tibshirani, 1994), Danzig selector (Candès & Tao, 2007), and L1-regularized logistic regression (Kleinbaum & Klein, 2010). Alternative greedy-optimization approaches include orthogonal matching pursuit (OMP) (Tropp, 2004; Zhang, 2009),
backward elimination, and forward-backward greedy
method (FoBa) (Zhang, 2011a), which use greedy heuristic
procedure to estimate sparse signals. Both types of algorithms have been well studied from both theoretical and
empirical perspectives.
055
056
057
058
059
060
061
062
063
064
065
066
067
068
069
070
071
072
073
074
075
076
077
078
079
080
081
082
083
084
085
086
087
088
089
090
091
092
093
094
095
096
097
098
099
100
101
102
103
104
105
106
107
108
109
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
FoBa has been shown to give better theoretical properties
than LASSO and Dantzig selector for the least squared loss
function: Q(β) = 12 kXβ−yk2 (Zhang, 2011a). Jalali et al.
(2011) has recently extended it to general convex smooth
functions. Their method and analysis, however, pose computational and theoretical issues. First, since FoBa solves
a large number of single variable optimization problems in
every forward selection step, it is computationally expensive for general convex functions if the sub-problems have
no closed form solution. Second, though they have empirically shown that FoBa performs well for general smooth
convex functions, their theoretical results are weaker than
those for the least square case (Zhang, 2011a). More precisely, their upper bound for estimation error is looser and
their analysis requires more restricted conditions for feature selection and signal recovery consistency. The question of whether or not FoBa can achieve the same theoretical bound in the general case as in the least square case
motivates this work.
This paper addresses the theoretical and computational issues associated with the standard FoBa algorithm (hereinafter referred to as FoBa-obj because it solves single variable problems to minimize the objective in each forward
selection step). We study a new algorithm referred to as
“gradient” FoBa (FoBa-gdt) which significantly improves
the computational efficiency of FoBa-obj. The key difference is that FoBa-gdt only evaluates gradient information
in individual forward selection steps rather than solving a
large number of single variable optimization problems. Our
contributions are summarized as follows.
Theoretical Analysis of FoBa-obj and FoBa-gdt This paper presents three main theoretical contributions. First,
we derive better theoretical bounds for estimation error,
objective error, and feature selection error than existing
analyses for FoBa-obj for general smooth convex functions (Jalali et al., 2011) under the same condition: restricted strong convexity condition. Second, we show that
FoBa-gdt achieves the same theoretical performance as
FoBa-obj. Our new bounds are consistent with the bounds
of a special case, i.e., the least square case, and fills in the
theoretical gap between the general loss (Jalali et al., 2011)
and the least squares loss case (Zhang, 2011a). Our result
also implies an interesting result: when the signal noise ratio is big enough, the NP hard problem (1) can be solved
by using FoBa-obj or FoBa-gdt. Third, we show that the
restricted strong convexity condition is satisfied for a class
of commonly used machine learning objectives, e.g., logistic loss and least square loss, if the number of independent
samples is greater than k̄ log d where k̄ is the sparsity number and d is the dimension of the variable.
Application to Sensor Selection We have applied FoBagdt with the CRF loss function (referred to as FoBa-gdt-
CRF) to sensor selection from time-series binary location
signals (captured by pyroelectric sensors) for human activity recognition at homes, which is a fundamental problem in smart home systems and home energy management systems. In comparison with forward greedy and L1regularized CRFs (referred to as L1-CRF), FoBa-gdt-CRF
requires the smallest number of sensors for achieving comparable recognition accuracy.
1.1. Notation
Denote ej ∈ Rd as the j th natural basis in the space Rd .
The set difference A − B returns the elements that are in
A but outside of B. Given any integer s > 0, the restricted
strong convexity constants (RSCC) ρ− (s) and ρ+ (s) are
defined as follows: for any ktk0 ≤ s and t = β 0 − β, we
require
ρ+ (s) 2
ρ− (s) 2
ktk ≤ Q(β 0 ) − Q(β) − hOQ(β), ti ≤
ktk .
2
2
(2)
Similar definitions can be found in (Bahmani et al., 2011;
Jalali et al., 2011; Negahban et al., 2010; Zhang, 2009).
If the objective function takes the quadratic form Q(β) =
1
2
2 kXβ − yk , then the above definition is equivalent to the
restricted isometric property (RIP) (Candès & Tao, 2005):
ρ− (s)ktk2 ≤ kXtk2 ≤ ρ+ (s)ktk2 ,
where the well known RIP constant can be defined as δ =
max{1 − ρ− (s), ρ+ (s) − 1}. To give tighter values for
ρ+ (.) and ρ− (.), we only require (2) to hold for all β ∈
Ds := {kβk0 ≤ s | Q(β) ≤ Q(0)} throughout this paper.
Finally we define β̂(F ) as β̂(F ) := arg minsupp(β)⊂F :
Q(β). Note that the problem is convex as long as Q(β) is a
convex function. Denote F̄ := supp(β̄) and k̄ := |F̄ |.
We make use of order notation throughout this paper. If a
and b are both positive quantities that depend on n or p, we
write a = O(b) if a can be bounded by a fixed multiple of
b for all sufficiently large dimensions. We write a = o(b)
if for any positive constant φ > 0, we have a ≤ φb for all
sufficiently large dimensions. We write a = Ω(b) if both
a = O(b) and b = O(a) hold.
2. Related Work
Tropp (2004) investigated the behavior of the orthogonal
matching pursuit (OMP) algorithm for the least square
case, and proposed a sufficient condition (an `∞ type condition) for guaranteed feature selection consistency. Zhang
(2009) generalized this analysis to the case of measurement noise. In statistics, OMP is known as boosting
(Buhlmann, 2006) and similar ideas have been explored in
Bayesian network learning (Chickering & Boutilier, 2002).
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
Shalev-Shwartz et al. (2010) extended OMP to the general
convex smooth function and studied the relationship between objective value reduction and output sparsity. Other
greedy methods such as ROMP (Needell & Vershynin,
2009) and CoSaMp (Needell & Tropp, 2008) were studied
and shown to have theoretical properties similar to those
of OMP. Zhang (2011a) proposed a Forward-backward
(FoBa) greedy algorithm for the least square case, which is
an extension of OMP but has stronger theoretical guarantees as well as better empirical performance: feature selection consistency is guaranteed under the sparse eigenvalue
condition, which is an `2 type condition weaker than the
`∞ type condition. Note that if the data matrix is a Gaussian random matrix, the `2 type condition requires the measurements n to be of the order of O(s log d) where s is the
sparsity of the true solution and d is the number of features,
while the `∞ type condition requires n = O(s2 log d);
see (Zhang & Zhang, 2012; Liu et al., 2012). Jalali et al.
(2011) and Johnson et al. (2012) extended the FoBa algorithm to general convex functions and applied it to sparse
inverse covariance estimation problems.
Convex methods, such as LASSO (Zhao & Yu, 2006) and
Dantzig selector (Candès & Tao, 2007), were proposed for
sparse learning. The basic idea behind these methods is
to use the `1 -norm to approximate the `0 -norm in order
to transform problem (1) into a convex optimization problem. They usually require restricted conditions referred to
as irrepresentable conditions (stronger than the RIP condition) for guaranteed feature selection consistency (Zhang,
2011a). A multi-stage procedure on LASSO and Dantzig
selector (Liu et al., 2012) relaxes such condition, but it is
still stronger than RIP.
Algorithm 1 FoBa ( FoBa-obj FoBa-gdt )
Require: δ > 0 > 0
Ensure: β (k)
1: Let F (0) = ∅, β (0) = 0, k = 0,
2: while TRUE do
3:
%% stopping determination
4:
(k)
if Q(β (k) ) − minα,j ∈F
+ αej ) < δ
/ (k) Q(β
5:
6:
7:
kOQ(β (k) )k∞ < then
break
end if
%% forward step
8:
i(k) = arg mini∈F
/ (k) {minα Q(β
(k)
+ αei )}
(k)
i(k) = arg maxi∈F
)i |
/ (k) : |∇Q(β
9:
10:
11:
12:
13:
14:
15:
16:
17:
18:
19:
20:
21:
22:
23:
F (k+1) = F (k) ∪ {i(k) }
β (k+1) = β̂(F (k+1) )
δ (k+1) = Q(β (k) ) − Q(β (k+1) )
k =k+1
%% backward step
while TRUE do
(k)
if mini∈F (k+1) Q(β (k) − βi ei ) − Q(β (k) ) ≥
δ (k) /2 then
break
end if
(k)
i(k) = arg mini Q(β (k) − βi ei )
k =k−1
F (k) = F (k+1) − {i(k+1) }
β (k) = β̂(F (k) )
end while
end while
3. The Gradient FoBa Algorithm
This section introduces the standard FoBa algorithm, that
is, FoBa-obj, and its variant FoBa-gdt. Both algorithms
start from an empty feature pool F and follow the same
procedure in every iteration consisting of two steps: a forward step and a backward step. The forward step evaluates
the “goodness” of all features outside of the current feature
set F , selects the best feature to add to the current feature
pool F , and then optimizes the corresponding coefficients
of all features in the current feature pool F to obtain a new
β. The elements of β in F are nonzero and the rest are zeros. The backward step iteratively evaluates the “badness”
of all features outside of the current feature set F , removes
“bad” features from the current feature pool F , and recomputes the optimal β over the current feature set F . Both algorithms use the same definition of “badness” for a feature:
the increment of the objective after removing this feature.
Specifically, for any features i in the current feature pool F ,
the “badness” is defined as Q(β − βi ei ) − Q(β), which is
a positive number. It is worth to note that the forward step
selects one and only one feature while the backward step
may remove zero, one, or more features. Finally, both algorithms terminate when no “good” feature can be identified
in the forward step, that is, the “goodness” of all features
outside of F is smaller than a threshold.
The main difference between FoBa-obj and FoBa-gdt lies
in the definition of “goodness” in the forward step and their
respective stopping criterion. FoBa-obj evaluates the goodness of a feature by its maximal reduction of the objective
function. Specifically, the “goodness” of feature i is defined as Q(β) − minα Q(β + αei ) (a larger value indicates
a better feature). This is a direct way to evaluate the “goodness” since our goal is to decrease the objective as much
as possible under the cardinality condition. However, it
may be computationally expensive since it requires solving
a large number of one-dimensional optimization problems,
which may or may not be solved in a closed form. To improve computational efficiency in such situations, FoBa-gdt
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
uses the partial derivative of Q with respect to individual
coordinates (features) as its “goodness’ measure: specifically, the “goodness” of feature i is defined as |∇Q(β)i |.
Note that the two measures of “goodness” are always nonnegative. If feature i is already in the current feature set
F , its “goodness” score is always zero, no matter which
measure to use. We summarize the details of FoBa-obj
and FoBa-gdt in Algorithm 1: the plain texts correspond
to the common part of both algorithms, and the ones with
solid boxes and dash boxes correspond to their individual
parts. The superscript (k) denotes the k th iteration incremented/decremented in the forward/backward steps.
Gradient-based feature selection has been used in a forward greedy method (Zhang, 2011b). FoBa-gdt extends it
to a Forward-backward procedure (we present a detailed
theoretical analysis of it in the next section). The main
workload in the forward step for FoBa-obj is on Step 4,
whose complexity is O(T D), where T represents the iterations needed to solve minα : Q(β (k) + αej ) and D is
the number of features outside of the current feature pool
set F (k) . In comparison, the complexity of Step 4 in FoBa
is just O(D). When T is large, we expect FoBa-gdt to be
much more computationally efficient. The backward steps
of both algorithms are identical. The computational costs
of the backward step and the forward step are comparable
in FoBa-gdt (but not FoBa-obj), because their main work
loads are on Step 10 and Step 21 (both are solving β̂(.))
respectively and the times of running Step 21 is always less
than that of Step 10.
4. Theoretical Analysis
This section first gives the termination condition of Algorithms 1 with FoBa-obj and FoBa-gdt because the number of iterations directly affect the values of RSCC (ρ+ (.),
ρ− (.), and their ratio), which are the key factors in our
main results. Then we discuss the values of RSCC in a
class of commonly used machine learning objectives. Next
we present the main results of this paper, including upper
bounds on objective, estimation, and feature selection errors for both FoBa-obj and FoBa-gdt. We compare our results to those of existing analyses of FoBa-obj and show
that our results fill the theoretical gap between the least
square loss case and the general case.
4.1. Upper Bounds on Objective, Estimation, and
Feature Selection Errors
We first study the termination conditions of FoBa-obj and
FoBa-gdt, as summarized in Theorems 1 and 2 respectively.
+ (1)
2
Theorem 1. Take δ > 4ρ
ρ− (s)2 kOQ(β̄)k∞ in Algorithm 1
with FoBa-obj where s can be any positive integer satisfy-
ing s ≤ n and
" s
(s − k̄) > (k̄ + 1)
ρ+ (s)
+1
ρ− (s)
!
2ρ+ (1)
ρ− (s)
#2
.
(3)
Then the algorithm terminates at some k ≤ s − k̄.
√
+ (1)
kOQ(β̄)k∞ in Algorithm 1
Theorem 2. Take > 2 ρ2ρ
− (s)
with FoBa-gdt, where s can be any positive integer satisfying s ≤ n and Eq.(3). Then the algorithm terminates at
some k ≤ s − k̄.
To simply the results, we first assume that the condition number κ(s) := ρ+ (s)/ρ− (s) is bounded (so is
ρ+ (1)/ρ− (s) because of ρ+ (s) ≥ ρ+ (1)). Then both
FoBa-obj and FoBa-gdt terminate at some k proportional to
the sparsity k̄, similar to OMP (Zhang, 2011b) and FoBaobj (Jalali et al., 2011; Zhang, 2011a). Note that the value
of k in Algorithm 1 is exactly the cardinality of F (k) and
the sparsity of β (k) . Therefore, Theorems 1 and 2 imply
that if κ(s) is bounded, FoBa-obj and FoBa-gdt will output a solution with sparsity proportional to that of the true
solution β̄.
Most existing works simply assume that κ(s) is bounded
or have similar assumptions. We make our analysis more
complete by discussing the values of ρ+ (s), ρ− (s), and
their ratio κ(s). Apparently, if Q(β) is strongly convex and
Lipschitzian, then ρ− (s) is bounded from below and ρ+ (s)
is bounded from above, thus restricting the ratio κ(s). To
see that ρ+ (s), ρ− (s), and κ(s) may still be bounded under milder conditions, we consider a common structure for
Q(β) used in many machine learning formulations:
n
Q(β) =
1X
li (Xi. β, yi ) + R(β)
n i=1
(4)
where (Xi. , yi ) is the ith training sample with Xi. ∈ Rd
and yi ∈ R, li (., .) is convex with respect to the first argument and could be different for different i, and both li (., .)
and R(.) are twice differentiable functions. li (., .) is typically the loss function, e.g., the quadratic loss li (u, v) =
(u − v)2 in regression problems and the logistic loss
li (u, v) = log(1 + exp{−uv}) in classification problems.
R(β) is typically the regularization, e.g., R(β) = µ2 kβk2 .
Theorem 3. Let s be a positive integer less than n, and
+
λ− , λ+ , λ−
R , and λR be positive numbers satisfying
λ− ≤ ∇21 li (Xi. β, yi ) ≤ λ+ ,
+
2
λ−
R I ∇ R(β) λR I
(∇21 li (., .) is the second derivative with respect to the
first argument) for any i and β ∈ Ds . Assume that
−
λ−
> 0 and the sample matrix X ∈ Rn×d
R + 0.5λ
has independent sub-Gaussian isotropic random rows or
columns (in the case of columns, all columns should also
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
489
490
491
492
493
494
√
satisfy kX.j k = n). If the number of samples satisfies
n ≥ Cs log d, then
+
ρ+ (s) ≤λ+
R + 1.5λ
(5a)
−
≥λ−
R + 0.5λ
+
λ+
R + 1.5λ
≤ −
λR + 0.5λ−
(5b)
ρ− (s)
κ(s)
=: κ
space limitations (the proofs are provided in Supplement).
The main results for FoBa-obj and FoBa-gdt are presented
in Theorems 4 and 5 respectively.
Theorem 4. Let s be any number that satisfies (3) and
choose δ as in Theorem 1 for Algorithm 1 with FoBa-obj.
Consider the output β (k) and its support set F (k) . We have
(5c)
hold with high probability1 , where C is a fixed constant.
Furthermore, define k̄, β̄, and δ (or ) in Algorithm 1 with
FoBa-obj (or FoBa-gdt) as in Theorem 1 (or Theorem 2).
Let
√
s = k̄ + 4κ2 ( κ + 1)2 (k̄ + 1)
(6)
and n ≥ Cs log d. We have that s satisfies (3) and Algorithm 1 with
√ FoBa-obj (or FoBa-gdt) terminates within at
most 4κ2 ( κ + 1)2 (k̄ + 1) iterations with high probability.
Roughly speaking, if the number of training samples is
large enough, i.e., n ≥ Ω(k̄ log d) (actually it could be
much smaller than the dimension d of the train data), we
have the following with high probability: Algorithm 1 with
FoBa-obj or FoBa-gdt outputs a solution with sparsity at
most Ω(k̄) (this result will be improved when the nonzero
elements of β̄ are strong enough, as shown in Theorems 4
and 5); s is bounded by Ω(k̄); and ρ+ (s), ρ− (s), and κ(s)
are bounded by constants. One important assumption is
that the sample matrix X has independent sub-Gaussian
isotropic random rows or columns. In fact, this assumption
is satisfied by many natural examples, including Gaussian
and Bernoulli matrices, general bounded random matrices
whose entries are independent bounded random variables
with zero mean and unit variances. Note that from the definition of “sub-Gaussian isotropic random vectors” (Vershynin, 2011, Definitions 19 and 22), it even allows the
dependence within rows or columns but not both. Another
−
important assumption is λ−
> 0, which means
R + 0.5λ
−
−
that either λR or λ is positive (both of them are nonnegative from the convexity assumption). WePcan simply verify
n
that 1) for the quadratic case Q(β) = n1 i=1 (Xi. β −yi )2 ,
−
−
we have λ = 1 and λR = 0; 2) for the logistic
Pn case with
bounded data matrix X, that is Q(β) = n1 i=1 log(1 +
exp{−Xi. βyi }) + µ2 kβk2 , we have λ−
R = µ > 0 and
λ− > 0 because Ds is bounded in this case.
Now we are ready to present the main results: the upper
bounds of estimation error, objective error, and feature selection error for both algorithms. ρ+ (s), ρ+ (1), and ρ− (s)
are involved in all bounds below. One can simply treat them
as constants in understanding the following results, since
we are mainly interested in the scenario when the number
of training samples is large enough. We omit proofs due to
1
“With high probability” means that the probability converges
to 1 with the problem size approaching to infinity.
16ρ2+ (1)δ ¯
∆,
ρ2− (s)
2ρ+ (1)δ ¯
Q(β (k) ) − Q(β̄) ≤
∆,
ρ− (s)
ρ− (s)2 (k)
¯
|F − F̄ | ≤|F̄ − F (k) | ≤ 2∆,
8ρ+ (1)2
kβ (k) − β̄k2 ≤
√
where γ =
γ}|.
4
ρ+ (1)δ
ρ− (s)
¯ := |{j ∈ F̄ − F (k) : |β̄j | <
and ∆
Theorem 5. Let s be any number that satisfies (3) and
choose as in Theorem 2 for Algorithm 1 with FoBa-gdt.
Consider the output β (k) and its support set F (k) . We have
kβ (k) − β̄k2 ≤
82 ¯
∆,
ρ2− (s)
Q(β (k) ) − Q(β̄) ≤
2 ¯
∆,
ρ− (s)
ρ− (s)2 (k)
¯
|F − F̄ | ≤|F̄ − F (k) | ≤ 2∆,
8ρ+ (1)2
where γ =
√
2 2
ρ− (s)
¯ := |{j ∈ F̄ − F (k) : |β̄j | < γ}|.
and ∆
Although FoBa-obj and FoBa-gdt use different criteria to
evaluate the “goodness” of each feature, they actually guarantee the same properties. Choose 2 and δ in the order of Ω(k∇Q(β̄)k2∞ ). For both algorithms, we have that
the estimation error kβ (k) − β̄k2 and the objectiev error
¯
Q(β (k) ) − Q(β̄) are bounded by Ω(∆k∇Q(
β̄)k2∞ ), and
(k)
the feature selection errors |F − F̄ | and |F̄ − F (k) | are
¯ k∇Q(β̄)k∞ and ∆
¯ are two key factors
bounded by Ω(∆).
in these bounds. k∇Q(β̄)k∞ roughly represents the noise
¯ defines the number of weak channels of the true
level2 . ∆
solution β̄ in F̄ . One can see that if all channels of β̄ on F̄
are strong enough, that is, |β̄j | > Ω(k∇Q(β̄)k∞ ) ∀j ∈ F̄ ,
¯ turns out to be 0. In other words, all errors (estimation
∆
error, objective error, and feature selection error) become 0,
when the signal noise ratio is big enough. Note that under
this condition, the original NP hard problem (1) is solved
exactly, which is summarized in the following corollary:
2
To see this, we can consider the least square case (with
standard noise assumption and each column of the measuren×d
ment
is normalized to 1): k∇Q(β̄)k∞ ≤
p matrix X ∈ R
−1
Ω( n log dσ) holds with high probability, where σ is the standard derivation.
495
496
497
498
499
500
501
502
503
504
505
506
507
508
509
510
511
512
513
514
515
516
517
518
519
520
521
522
523
524
525
526
527
528
529
530
531
532
533
534
535
536
537
538
539
540
541
542
543
544
545
546
547
548
549
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
550
551
552
553
554
555
556
557
558
559
560
561
562
563
564
565
566
567
568
569
570
571
572
573
574
575
576
577
578
579
580
581
582
583
584
585
586
587
588
589
590
591
592
593
594
595
596
597
598
599
600
601
602
603
604
Corollary 1. Let s be any number that satisfies (3) and
choose δ (or ) as in Theorem 1 (or 2) for Algorithm 1 with
FoBa-gdt (or FoBa-obj). If
|β̄j |
8ρ+ (1)
≥ 2
ρ− (s)
k∇Q(β̄)k∞
∀j ∈ F̄ ,
then problem (1) can be solved exactly.
One may argue that since it is difficult to set δ or , it is still
hard to solve (1). In practice, one does not have to set δ or
and only needs to run Algorithm 1 without checking the
stopping condition until all features are selected. Then the
most recent β (k̄) gives the solution to (1).
4.2. Comparison for the General Convex Case
Jalali et al. (2011) analyzed FoBa-obj for general convex
smooth functions and here we compare our results to theirs.
They chose the true model β ∗ as the target rather than the
true solution β̄. In order to simplify the comparison, we assume that the distance between the true solution and the
true model is not too great3 , that is, we have β ∗ ≈ β̄,
supp(β ∗ ) = supp(β̄), and k∇Q(β ∗ )k∞ ≈ k∇Q(β̄)k∞ .
We compare our results from Section 4.1 and the results in
(Jalali et al., 2011). In the estimation error comparison, we
have from our results:
kβ (k) − β ∗ k ≈ kβ (k) − β̄k
¯ 1/2 k∇Q(β̄)k∞ ) ≈ Ω(∆
¯ 1/2 k∇Q(β ∗ )k∞ )
≤Ω(∆
and from the results in (Jalali et al., 2011): kβ (k) − β ∗ k ≤
Ω(k̄k∇Q(β ∗ )k∞ ). Note that ∆1/2 ≤ k̄ 1/2 k̄. Therefore, under our assumptions with respect to β ∗ and β̄, our
analysis gives a tighter bound. Notably, when there are
a large number of strong channels in β̄ (or approximately
¯ k̄.
β ∗ ), we will have ∆
Let us next consider the condition required for feature selection consistency, that is, supp(F(k) ) = supp(F̄) =
supp(β ∗ ). We have from our results:
kβ̄j k ≥ Ω(k∇Q(β̄)k∞ ) ∀j ∈ supp(β ∗ )
and from the results in (Jalali et al., 2011):
kβj∗ k ≥ Ω(k̄k∇Q(β ∗ )k∞ ) ∀j ∈ supp(β ∗ ).
When β ∗ ≈ β̄ and k∇Q(β ∗ )k∞ ≈ k∇Q(β̄)k∞ , our
results guarantee feature selection consistency under a
weaker condition.
3
This assumption is not absolutely fair, but holds in many
cases, such as in the least square case, which will be made clear
in Section 4.3.
4.3. A Special Case: Least Square Loss
1
2 kXβ
We next consider the least square case: Q(β) =
−
yk2 and shows that our analysis for the two algorithms in
Section 4.1 fills in a theoretical gap between this special
case and the general convex smooth case.
Following previous studies (Candès & Tao, 2007; Zhang,
2011b; Zhao & Yu, 2006), we assume that y = Xβ ∗ + ε
where the entries in ε are independent random sub-gaussian
variables, β ∗ is the true model with the support set F̄ and
the sparsity number k̄ := |F̄ |, and X ∈ Rn×d is normalized as kX.i k2 = 1 for all columns i = 1, · · · , d. We then
have following inequalities with high probability (Zhang,
2009):
p
k∇Q(β ∗ )k∞ = kX T εk∞ ≤ Ω( n−1 log d), (7)
p
k∇Q(β̄)k∞ ≤ Ω( n−1 log d),
(8)
p
∗
kβ̄ − β k2 ≤ Ω( n−1 k̄),
(9)
q
kβ̄ − β ∗ k∞ ≤ Ω( n−1 log k̄),
(10)
implying that β̄ and β ∗ are quite close when the true model
is really sparse, that is, when k̄ n.
An analysis for FoBa-obj in the least square case (Zhang,
2011a) has indicated that the following estimation error
bound holds with high probability:
kβ (k) − β ∗ k2 ≤ Ω(n−1 (k̄+
p
log d|{j ∈ F̄ : |βj∗ | ≤ Ω( n−1 log d)}|))
(11)
as well as the following condition for feature selection consistency:
p
supp(β (k) ) = supp(β ∗ ), if |βj∗ | ≥ Ω( n−1 log d) ∀j ∈ F̄ .
(12)
Applying the analysis for general convex smooth cases in
(Jalali et al., 2011) to the least square case, one obtains the
following estimation error bound from Eq. (7)
kβ (k) − β ∗ k2 ≤ Ω(k̄ 2 kOQ(β ∗ )k2∞ ) ≤ Ω(n−1 k̄ 2 log d)
and the following condition of feature selection consistency:
q
supp(β (k) ) = supp(β ∗ ), if |βj∗ | ≥ Ω( k̄n−1 log d) ∀ j ∈ F̄ .
One can observe that the general analysis gives a looser
bound for estimation error and requires a stronger condition
for feature selection consistency than the analysis for the
special case.
Our results in Theorems 4 and 5 bridge this gap when combined with Eqs. (9) and (10). The first inequalities in The-
605
606
607
608
609
610
611
612
613
614
615
616
617
618
619
620
621
622
623
624
625
626
627
628
629
630
631
632
633
634
635
636
637
638
639
640
641
642
643
644
645
646
647
648
649
650
651
652
653
654
655
656
657
658
659
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
660
661
662
663
664
665
666
667
668
669
670
671
672
673
674
675
676
677
678
679
680
681
682
683
684
685
686
687
688
689
690
691
692
693
694
695
696
697
698
699
700
701
702
703
704
705
706
707
708
709
710
711
712
713
714
orems 4 and 5 indicate that
kβ (k) − β ∗ k2 ≤ (kβ (k) − β̄k + kβ̄ − β ∗ k)2
≤Ω n−1 (k̄ + log d | {j ∈ F̄ − F (k) :
p
[from Eq. (9)]
|β̄j | < Ω(n−1/2 log d)}|)
≤Ω n−1 (k̄ + log d | {j ∈ F̄ − F (k) :
p
|βj∗ | < Ω(n−1/2 log d)}|)
[from Eq. (10)]
which is consistent with the results in Eq. (11). The last
inequality in Theorem 5 also implies that feature selectionpconsistency is guaranteedp
as well, as long as |β̄j | >
Ω( n−1 log d) (or |βj∗ | > Ω( n−1 log d)) for all j ∈ F̄ .
This requirement agrees with the results in Eq. (12).
5. Application: Sensor Selection for Human
Activity Recognition
Machine learning technologies for smart home systems and
home energy management systems have recently attracted
much attention. Among the many promising applications
such as optimal energy control, emergency alerts for elderly persons living alone, and automatic life-logging, a
fundamental challenge for these applications is to recognize human activity at homes, with the smallest number of
sensors. The data mining task here is to minimize the number of sensors without significantly worsening recognition
accuracy. We used pyroelectric sensors, which return binary signals in reaction to human motion.
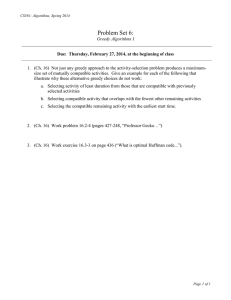
Fig. 1 shows our experimental room layout and sensor locations. The numbers represent sensors, and the ellipsoid
around each represents the area covered by it. We used
40 sensors, i.e., we observe a 40-dimensional binary time
series. A single person lives in the room for roughly one
month, and data is collected on the basis of manually tagging his activities into the pre-determined 14 categories
summarized in Table 5. For data preparation reasons, we
use the first 20% (roughly one week) samples in the data,
and divide it into 10% for training and 10% for testing. The
numbers of training and test samples are given in Table 1.
Pyroelectric sensors are preferable over cameras for two
practical reasons: cameras tend to create a psychological
barrier and pyroelectric sensors are much cheaper and easier to implement at homes. Such sensors only observe
noisy binary location information. This means that, for
high recognition accuracy, history (sequence) information
must be taken into account. The binary time series data
follows a linear-chain conditional random field (CRF) (Lafferty et al., 2001; Sutton & McCallum, 2006). Linear-chain
CRF gives a smooth and convex loss function; see Supple-
Figure 1. Room layout and sensor locations.
Table 1. Activities in the sensor data set
ID
Activity
train/test samples
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Sleeping
Out of Home (OH)
Using Computer
Relaxing
Eating
Cooking
Showering (Bathing)
No Event
Using Toilet
Hygiene (brushing teeth, etc.)
Dishwashing
Beverage Preparation
Bath Cleaning/Preparation
Others
81442/87433
66096/42478
64640/46254
25290/65312
6403/6016
5249/4633
3930/4977
3443/3486
2464/2625
1614/1617
1495/1831
1388/1441
492/320
6549/2072
Total
-
270495/270495
ment D.2 for more details of CRF.
Our task then is sensor selection on the basis of noisy binary time series data, and to do this we apply our FoBagdt-CRF (FoBa-gdt with CRF objective function). Since it
is very expensive to evaluate the CRF objective value and
its gradient, FoBa-obj becomes impractical in this case (a
large number of optimization problems in the forward step
make it computationally very expensive). Here, we consider a sensor to have been “used” if at least one feature related to it is used in the CRF. Note that we have 14 activitysignal binary features (i.e., indicators of sensor/activity simultaneous activations) for each single sensor, and therefore we have 40 × 14 = 560 such features in total. In
addition, we have 14 × 14 = 196 activity-activity binary
features (i.e., indicators of the activities at times t − 1 and
t). As explained in Section D.2, we only enforced sparsity
on the first type of features.
First we compare FoBa-gdt-CRF with Forward-gdt-CRF
(Forward-gdt with CRF loss function) and L1-CRF4 in
4
L1-CRF solves the optimization problem with CRF loss + L1
regularization. Since it is difficult to search the whole space L1
regularization parameter value space, we investigated a number of
discrete values.
715
716
717
718
719
720
721
722
723
724
725
726
727
728
729
730
731
732
733
734
735
736
737
738
739
740
741
742
743
744
745
746
747
748
749
750
751
752
753
754
755
756
757
758
759
760
761
762
763
764
765
766
767
768
769
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
770
771
772
773
774
775
776
777
778
779
780
781
782
783
784
785
786
787
788
789
790
791
792
793
794
795
796
797
798
799
800
801
802
803
804
805
806
807
808
809
810
811
812
813
814
815
816
817
818
819
820
821
822
823
824
Table 2. Sensor IDs selected by FoBa-gdt-CRF.
# of sensors=10
# of sensors=15
{1, 4, 5, 9, 10, 13, 19, 28, 34, 38}
{# of sensors=10} + {2, 7, 36, 37, 40}
w.r.t. activity 5 (Eating) significantly decreases from the
case # of sensors=10 to # of sensors=15 by including
sensor 2.
6. Additional Experiments
Figure 2. Top: comparisons of FoBa-gdt-CRF, Forward-gdt-CRF
and L1-CRF. Bottom: test error rates (FoBa-gdt-CRF) for individual activities.
terms of test recognition error over the number of sensors
selected (see the top of Fig. 2). We can observe that
• The performance for all methods improves when the umber of sensors increases.
• FoBa-gdt-CRF and Forward-gdt-CRF achieve comparable performance. However, FoBa-gdt-CRF reduces the
error rate slightly faster, in terms of the number of sensors.
• FoBa-gdt-CRF achieves its best performance with 14-15
sensors while Forward-gdt-CRF needs 17-18 sensors to
achieve the same error level. We obtain sufficient accuracy by using fewer than 40 sensors.
• FoBa-gdt-CRF consistently requires fewer features than
Forward-gdt-CRF to achieve the same error level when
using the same number of sensors.
We also analyze the test error rates of FoBa-gdt-CRF for
individual activities. We consider two cases with the number of sensors being 10 and 15, and entered their test error
rates for each individual activity in the bottom of Fig. 2.
We observe that:
• The high frequency activities (e.g., activities {1,2,3,4})
are well recognized in both cases. In other words, FoBagdt-CRF is likely to select sensors (features) which contribute to the discrimination of high frequency activities.
• The error rates for activities {5, 7, 9} significantly improve when the number of sensors increases from 10 to
15. Activities 7 and 9 are Showering and Using Toilet,
and the use of additional sensors {36, 37, 40} seems to
have contributed to this improvement. Also, a dinner table was located near sensor 2, which is why the error rate
Although this paper mainly focuses on the theoretical analysis for FoBa-obj and FoBa-gdt, we conduct additional experiments to study the behaviors of FoBa-obj and FoBa-gdt
in Supplement (part D). We mainly consider two models:
logistic regression and linear-chain CRFs, and the comparison among four algorithms (FoBa-gdt, FoBa-obj, and
their corresponding forward greedy algorithms) on both
synthetic data and real world data. We empirically show,
in application to logistic regression and conditional random fields (CRFs) (Lafferty et al., 2001), that FoBa-gdt
achieves similar empirical performance as FoBa-obj with a
much lower computational cost. Note that comparisons of
FoBa-obj and L1-regularization methods can be found in
previous studies (Jalali et al., 2011; Zhang, 2011a).
7. Conclusion
This paper considers two forward-backward greedy methods, a state-of-the-art greedy method FoBa-obj and its variant FoBa-gdt which is more efficient than FoBa-obj, for
solving sparse feature selection problems with general convex smooth functions. We systematically analyze the theoretical properties of both algorithms. Our main contributions include: 1) We derive better theoretical bounds
for FoBa-obj and FoBa-gdt than existing analyses regarding FoBa-obj in (Jalali et al., 2011) for general smooth
convex functions. Our result also suggests that the NP
hard problem (1) can be solved by FoBa-obj and FoBagdt if the signal noise ratio is big enough; 2) Our new
bounds are consistent with the bounds of a special case
(least squares) (Zhang, 2011a) and fills a previously existing theoretical gap for general convex smooth functions
(Jalali et al., 2011); 3) We show that the condition to satisfy
the restricted strong convexity condition in commonly used
machine learning problems; 4) We apply FoBa-gdt (with
the conditional random field objective) to the sensor selection problem for human indoor activity recognition and our
results show that FoBa-gdt can successfully remove unnecessary sensors and is able to select more valuable sensors
than other methods (including the ones based on forward
greedy selection and L1-regularization). As for the future
work, we plan to extend FoBa algorithms to minimize a
general convex smooth function over a low rank constraint.
825
826
827
828
829
830
831
832
833
834
835
836
837
838
839
840
841
842
843
844
845
846
847
848
849
850
851
852
853
854
855
856
857
858
859
860
861
862
863
864
865
866
867
868
869
870
871
872
873
874
875
876
877
878
879
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
880
881
882
883
884
885
886
887
888
889
890
891
892
893
894
895
896
897
898
899
900
901
902
903
904
905
906
907
908
909
910
911
912
913
914
915
916
917
918
919
920
921
922
923
924
925
926
927
928
929
930
931
932
933
934
References
Bahmani, S., Boufounos, P., and Raj, B. Greedy sparsityconstrained optimization. ASILOMAR, pp. 1148–1152,
2011.
Buhlmann, P. Boosting for high-dimensional linear models. Annals of Statistics, 34:559–583, 2006.
Candès, E. J. and Tao, T. Decoding by linear programming. IEEE Transactions on Information Theory, 51
(12):4203–4215, 2005.
Candès, E. J. and Tao, T. The Dantzig selector: statistical estimation when p is much larger than n. Annals of
Statistics, 35(6):2313–2351, 2007.
Chickering, D. M. and Boutilier, C. Optimal structure identification with greedy search. Journal of Machine Learning Research, 3:507–554, 2002.
Jalali, A., Johnson, C. C., and Ravikumar, P. D. On learning
discrete graphical models using greedy methods. NIPS,
2011.
Johnson, C. C., Jalali, A., and Ravikumar, P. D. Highdimensional sparse inverse covariance estimation using
greedy methods. Journal of Machine Learning Research
- Proceedings Track, 22:574–582, 2012.
Kleinbaum, D. G. and Klein, M. Logistic regression.
Statistics for Biology and Health, pp. 103–127, 2010.
Lafferty, J. D., McCallum, A., and Pereira, F. C. N. Conditional random fields: Probabilistic models for segmenting and labeling sequence data. ICML, pp. 282–289,
2001.
Liu, J., Wonka, P., and Ye, J. A multi-stage framework
for dantzig selector and LASSO. Journal of Machine
Learning Research, 13:1189–1219, 2012.
Needell, D. and Tropp, J. A. CoSaMP: Iterative signal
recovery from incomplete and inaccurate samples. Applied and Computational Harmonic Analysis, 26:301–
321, 2008.
Needell, D. and Vershynin, R. Uniform uncertainty principle and signal recovery via regularized orthogonal
matching pursuit. Foundations of Computational Mathematics, 9(3):317–334, 2009.
Negahban, S., Ravikumar, P. D., Wainwright, M. J., and Yu,
B. A unified framework for high-dimensional analysis
of M-estimators with decomposable regularizers. CoRR,
abs/1010. 2731, 2010.
Ravikumar, P., Wainwright, M. J., Raskutti, G., and Yu,
B. High-dimensional covariance estimation by minimizing `1 -penalized log-determinant divergence. Electronic
Journal of Statistics, 5:935–980, 2011.
Shalev-Shwartz, S., Srebro, N., and Zhang, T. Trading accuracy for sparsity in optimization problems with sparsity constraints. SIAM Journal on Optimization, 20(6):
2807–2832, 2010.
Sutton, C. and McCallum, A. An introduction to conditional random fields for relational learning. Introduction
to Statistical Relational Learning, pp. 93–128, 2006.
Tibshirani, R. Regression shrinkage and selection via the
lasso. Journal of the Royal Statistical Society, Series B,
58:267–288, 1994.
Tropp, J. A. Greed is good: algorithmic results for sparse
approximation. IEEE Transactions on Information Theory, 50(10):2231–2242, 2004.
Vershynin, R. Introduction to the non-asymptotic analysis
of random matrices. arXiv:1011.3027, 2011.
Zhang, C.-H. and Zhang, T. A general theory of concave regularization for high dimensional sparse estimation problems. Statistical Science, 27(4), 2012.
Zhang, T. On the consistency of feature selection using
greedy least squares regression. Journal of Machine
Learning Research, 10:555–568, 2009.
Zhang, T. Adaptive forward-backward greedy algorithm
for learning sparse representations. IEEE Transactions
on Information Theory, 57(7):4689–4708, 2011a.
Zhang, T. Sparse recovery with orthogonal matching pursuit under RIP. IEEE Transactions on Information Theory, 57(9):6215–6221, 2011b.
Zhao, P. and Yu, B. On model selection consistency of
lasso. Journal of Machine Learning Research, 7:2541–
2563, 2006.
935
936
937
938
939
940
941
942
943
944
945
946
947
948
949
950
951
952
953
954
955
956
957
958
959
960
961
962
963
964
965
966
967
968
969
970
971
972
973
974
975
976
977
978
979
980
981
982
983
984
985
986
987
988
989
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
990
991
992
993
994
995
996
997
998
999
1000
1001
1002
1003
1004
1005
1006
1007
1008
1009
1010
1011
1012
1013
1014
1015
1016
1017
1018
1019
1020
1021
1022
1023
1024
1025
1026
1027
1028
1029
1030
1031
1032
1033
1034
1035
1036
1037
1038
1039
1040
1041
1042
1043
1044
Supplemental Material: Proofs
This supplemental material provides the proofs for our main results including the properties of FoBa-obj (Theorems 1, and
4) and FoBa-gdt (Theorems 2 and 5), and analysis for the RSCC condition (Theorem 3).
Our proofs for Theorems 1, 2, 4, and 5 borrowed many tools from early literatures including Zhang (2011b), Jalali et al.
(2011), Johnson et al. (2012), Zhang (2009), Zhang (2011a). The key novelty in our proof is to develop a key property for
the backward step (see Lemmas 3 and 7), which gives an upper bound for the number of wrong features included in the
feature pool. By taking a full advantage of this upper bound, the presented proofs for our main results (i.e., Theorems 1,
2, 4, and 5) are significantly simplified. It avoids the complicated induction procedure in the proof for the forward greedy
method (Zhang, 2011b) and also improves the existing analysis for the same problem in Jalali et al. (2011).
A. Proofs of FoBa-obj
First we prove the properties of the FoBa-obj algorithm, particularly Theorems 4 and 1.
Lemma 1 and Lemma 2 build up the dependence between the objective function change δ and the gradient |∇Q(β)j |.
Lemma 3 studies the effect of the backward step. Basically, it gives an upper bound of |F (k) − F̄ |, which meets our
intuition that the backward step is used to optimize the size of the feature pool. Lemma 4 shows that if δ is big enough,
which means that the algorithm terminates early, then Q(β (k) ) cannot be smaller than Q(β̄). Lemma 5 studies the forward
step of FoBa-obj. It shows that the objective decreases sufficiently in every forward step, which together with Lemma 4
(that is, Q(β (k) ) > Q(β̄)), implies that the algorithm will terminate within limited number of iterations. Based on these
results, we provide the complete proofs of Theorems 4 and 1 at the end of this section.
Lemma 1. If Q(β) − minη Q(β + ηej ) ≥ δ, then we have
|∇Q(β)j | ≥
p
2ρ− (1)δ.
Proof. From the condition, we have
−δ ≥ min Q(β + ηej ) − Q(β)
η
ρ− (1) 2
≥ minhηej , ∇Q(β)i +
η (from the definition of ρ− (1))
η
2
2
ρ− (1)
∇Q(β)j
|∇Q(β)j |2
= min
η−
−
η
2
ρ− (1)
2ρ− (1)
|∇Q(β)j |2
=−
.
2ρ− (1)
It indicates that |∇Q(β)j | ≥
p
2ρ− (1)δ.
Lemma 2. If Q(β) − minj,η Q(β + ηej ) ≤ δ, then we have
k∇Q(β)k∞ ≤
p
2ρ+ (1)δ.
1045
1046
1047
1048
1049
1050
1051
1052
1053
1054
1055
1056
1057
1058
1059
1060
1061
1062
1063
1064
1065
1066
1067
1068
1069
1070
1071
1072
1073
1074
1075
1076
1077
1078
1079
1080
1081
1082
1083
1084
1085
1086
1087
1088
1089
1090
1091
1092
1093
1094
1095
1096
1097
1098
1099
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
1100
1101
1102
1103
1104
1105
1106
1107
1108
1109
1110
1111
1112
1113
1114
1115
1116
1117
1118
1119
1120
1121
1122
1123
1124
1125
1126
1127
1128
1129
1130
1131
1132
1133
1134
1135
1136
1137
1138
1139
1140
1141
1142
1143
1144
1145
1146
1147
1148
1149
1150
1151
1152
1153
1154
Proof. From the condition, we have
δ ≥Q(β) − min Q(β + ηej )
η,j
= max Q(β) − Q(β + ηej )
η,j
ρ+ (1) 2
η
η,j
2
2
ρ+ (1)
∇Q(β)j
|∇Q(β)j |2
η−
= max −
−
η,j
2
ρ+ (1)
2ρ+ (1)
2
|∇Q(β)j |
= max
j
2ρ+ (1)
k∇Q(β)k2∞
=
2ρ+ (1)
≥ max −hηej , ∇Q(β)i −
It indicates that k∇Q(β)k∞ ≤
p
2ρ+ (1)δ.
Lemma 3. (General backward criteria). Consider β (k) with the support F (k) in the beginning of each iteration in Algorithm 1 with FoBa-obj (Here, β (k) is not necessarily the output of this algorithm). We have for any β̄ ∈ Rd with the support
F̄
(k)
kβF (k) −F̄ k2 = k(β (k) − β̄)F (k) −F̄ k2 ≥
δ (k)
δ
|F (k) − F̄ | ≥
|F (k) − F̄ |.
ρ+ (1)
ρ+ (1)
(13)
Proof. We have
(k)
|F (k) − F̄ | min Q(β (k) − βj ej ) ≤
j∈F (k)
X
(k)
Q(β (k) − βj ej )
j∈F (k) −F̄
≤
X
(k)
Q(β (k) ) − OQ(β (k) )j βj
j∈F (k) −F̄
≤|F (k) − F̄ |Q(β (k) ) +
+
ρ+ (1) (k) 2
(βj )
2
ρ+ (1)
k(β (k) − β̄)F (k) −F̄ k2 .
2
The second inequality is due to OQ(β (k) )j = 0 for any j ∈ F (k) − F̄ and the third inequality is from β̄F (k) −F̄ = 0. It
follows that
δ (k)
ρ+ (1)
(k)
k(β (k) − β̄)F (k) −F̄ k2 ≥ |F (k) − F̄ |( min Q(β (k) − βj ej ) − Q(β (k) )) ≥ |F (k) − F̄ |
,
(k)
2
2
j∈F
which implies that the claim using δ (k) ≥ δ.
Lemma 4. Let β̄ = arg minsupp(β)∈F̄ Q(β). Consider β (k) in the beginning of each iteration in Algorithm with FoBa-obj.
Denote its support as F (k) . Let s be any integer larger than |F (k) − F̄ |. If takes δ >
we have Q(β
(k)
) ≥ Q(β̄).
4ρ+ (1)
2
ρ− (s)2 kOQ(β̄)k∞
in FoBa-obj, then
1155
1156
1157
1158
1159
1160
1161
1162
1163
1164
1165
1166
1167
1168
1169
1170
1171
1172
1173
1174
1175
1176
1177
1178
1179
1180
1181
1182
1183
1184
1185
1186
1187
1188
1189
1190
1191
1192
1193
1194
1195
1196
1197
1198
1199
1200
1201
1202
1203
1204
1205
1206
1207
1208
1209
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
1210
1211
1212
1213
1214
1215
1216
1217
1218
1219
1220
1221
1222
1223
1224
1225
1226
1227
1228
1229
1230
1231
1232
1233
1234
1235
1236
1237
1238
1239
1240
1241
1242
1243
1244
1245
1246
1247
1248
1249
1250
1251
1252
1253
1254
1255
1256
1257
1258
1259
1260
1261
1262
1263
1264
Proof. We have
Q(β (k) ) − Q(β̄)
ρ− (s) (k)
kβ − β̄k2
2
ρ− (s) (k)
≥hOQ(β̄)F (k) −F̄ , (β (k) − β̄)F (k) −F̄ i +
kβ − β̄k2
2
ρ− (s) (k)
≥ − kOQ(β̄)k∞ k(β (k) − β̄)F (k) −F̄ k1 +
kβ − β̄k2
2
q
ρ− (s) (k)
≥ − kOQ(β̄)k∞ |F (k) − F̄ |kβ (k) − β̄k +
kβ − β̄k2
2
r
ρ+ (1) ρ− (s) (k)
(k)
2
≥ − kOQ(β̄)k∞ kβ − β̄k
+
kβ − β̄k2 (from Lemma 3)
δ!
2
p
ρ− (s) kOQ(β̄)k∞ ρ+ (1)
√
kβ (k) − β̄k2
=
−
2
δ
≥hOQ(β̄), β (k) − β̄i +
>0. (from δ >
4ρ+ (1)
kOQ(β̄)k2∞ )
ρ− (s)2
It proves the claim.
Proof of Theorem 4
Proof. From Lemma 4, we only need to consider the case Q(β (k) ) ≥ Q(β̄). We have
0 ≥ Q(β̄) − Q(β (k) ) ≥ hOQ(β (k) ), β̄ − β (k) i +
ρ− (s)
kβ̄ − β (k) k2 ,
2
which implies that
ρ− (s)
kβ̄ − β (k) k2 ≤ − hOQ(β (k) ), β̄ − β (k) i
2
= − hOQ(β (k) )F̄ −F (k) , (β̄ − β (k) )F̄ −F (k) i
≤kOQ(β (k) )F̄ −F (k) k∞ k(β̄ − β (k) )F̄ −F (k) k1
q
p
≤ 2ρ+ (1)δ |F̄ − F (k) ||β̄ − β (k) k. (from Lemma 2)
We obtain
kβ̄ − β
(k)
p
q
2 2ρ+ (1)δ
k≤
|F̄ − F (k) |.
ρ− (s)
It follows that
8ρ+ (1)δ
|F̄ − F (k) | ≥kβ̄ − β (k) k2
ρ− (s)2
≥k(β̄ − β (k) )F̄ −F (k) k2
=kβ̄F̄ −F (k) k2
≥γ 2 |{j ∈ F̄ − F (k) : |β̄j | ≥ γ}|
=
16ρ+ (1)δ
|{j ∈ F̄ − F (k) : |β̄j | ≥ γ}|,
ρ− (s)2
which implies that
|F̄ − F (k) | ≥ 2|{j ∈ F̄ − F (k) : |β̄j | ≥ γ}| = 2(|F̄ − F (k) | − |{j ∈ F̄ − F (k) : |β̄j | < γ}|)
⇒|F̄ − F (k) | ≤ 2|{j ∈ F̄ − F (k) : |β̄j | < γ}|.
(14)
1265
1266
1267
1268
1269
1270
1271
1272
1273
1274
1275
1276
1277
1278
1279
1280
1281
1282
1283
1284
1285
1286
1287
1288
1289
1290
1291
1292
1293
1294
1295
1296
1297
1298
1299
1300
1301
1302
1303
1304
1305
1306
1307
1308
1309
1310
1311
1312
1313
1314
1315
1316
1317
1318
1319
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
1320
1321
1322
1323
1324
1325
1326
1327
1328
1329
1330
1331
1332
1333
1334
1335
1336
1337
1338
1339
1340
1341
1342
1343
1344
1345
1346
1347
1348
1349
1350
1351
1352
1353
1354
1355
1356
1357
1358
1359
1360
1361
1362
1363
1364
1365
1366
1367
1368
1369
1370
1371
1372
1373
1374
The first inequality is obtained from Eq. (14)
kβ̄ − β
(k)
p
p
q
q
2ρ+ (1)δ
4 ρ+ (1)δ
(k)
k≤
|F̄ − F | ≤
|j ∈ F̄ − F (k) : |β̄j | < γ|.
ρ− (s)
ρ− (s)
2
Next, we consider
Q(β̄) − Q(β (k) )
ρ− (s)
kβ̄ − β (k) k2
2
ρ− (s)
=hOQ(β (k) )F̄ −F (k) , (β̄ − β (k) )F̄ −F (k) i +
kβ̄ − β (k) k2 (from OQ(β (k) )F (k) = 0)
2
ρ− (s)
≥ − kOQ(β (k) )k∞ kβ̄ − β (k) k1 +
kβ̄ − β (k) k2
2
q
p
ρ− (s)
≥ − 2ρ+ (1)δ |F̄ − F (k) |kβ̄ − β (k) k +
kβ̄ − β (k) k2
2
2
q
p
ρ− (s)
(k)
(k)
≥
kβ̄ − β k − 2ρ+ (1)δ |F̄ − F |/ρ− (s) − 2ρ+ (1)δ|F̄ − F (k) |/(2ρ− (s))
2
≥hOQ(β (k) ), β̄ − β (k) i +
≥ − 2ρ+ (1)δ|F̄ − F (k) |/(2ρ− (s))
≥−
2ρ+ (1)δ
|{j ∈ F̄ − F (k) : |β̄j | < γ}|.
ρ− (s)
It proves the second inequality. The last inequality in this theorem is obtained from the following:
2ρ+ (1)δ (k)
|F − F̄ |
2ρ+ (1)2
≤k(β (k) − β̄)F (k) −F̄ k2
≤kβ
(k)
(from Lemma 3)
2
− β̄k
8ρ+ (1)δ
|F̄ − F (k) |
ρ− (s)2
16ρ+ (1)δ
|{j ∈ F̄ − F (k) : |β̄j | < γ}|.
≤
ρ− (s)2
≤
It completes the proof.
Lemma 5. (General forward step of FoBa-obj) Let β = arg minsupp(β)⊂F Q(β). For any β 0 with support F 0 and i ∈
{i : Q(β) − minη Q(β + ηei ) ≥ (Q(β) − minj,η Q(β + ηej ))}, we have
|F 0 − F |(Q(β) − min Q(β + ηei )) ≥
η
ρ− (s)
(Q(β) − Q(β 0 )).
ρ+ (1)
1375
1376
1377
1378
1379
1380
1381
1382
1383
1384
1385
1386
1387
1388
1389
1390
1391
1392
1393
1394
1395
1396
1397
1398
1399
1400
1401
1402
1403
1404
1405
1406
1407
1408
1409
1410
1411
1412
1413
1414
1415
1416
1417
1418
1419
1420
1421
1422
1423
1424
1425
1426
1427
1428
1429
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
1430
1431
1432
1433
1434
1435
1436
1437
1438
1439
1440
1441
1442
1443
1444
1445
1446
1447
1448
1449
1450
1451
1452
1453
1454
1455
1456
1457
1458
1459
1460
1461
1462
1463
1464
1465
1466
1467
1468
1469
1470
1471
1472
1473
1474
1475
1476
1477
1478
1479
1480
1481
1482
1483
1484
Proof. We have that the following holds with any η
|F 0 − F | min
Q(β + η(βj0 − βj )ej )
j∈F 0 −F,η
X
≤
Q(β + η(βj0 − βj )ej )
j∈F 0 −F
X
≤
Q(β) + η(βj0 − βj )∇Q(β)j +
j∈F 0 −F
ρ+ (1)
(βj − βj0 )2 η 2
2
≤|F 0 − F |Q(β) + ηh(β 0 − β)F 0 −F , ∇Q(β)F 0 −F i +
ρ+ (1) 0
kβ − βk2 η 2
2
ρ+ (1) 0
kβ − βk2 η 2
2
ρ− (s)
ρ+ (1) 0
≤|F 0 − F |Q(β) + η(Q(β 0 ) − Q(β) −
kβ − β 0 k2 ) +
kβ − βk2 η 2 .
2
2
=|F 0 − F |Q(β) + ηhβ 0 − β, ∇Q(β)i +
By minimizing η, we obtain that
|F 0 − F |( min
0
j∈F −F,η
Q(β + η(βj0 − βj )ej ) − Q(β))
≤ min η(Q(β 0 ) − Q(β) −
η
≤−
ρ+ (1) 0
ρ− (s)
kβ − β 0 k2 ) +
kβ − βk2 η 2
2
2
(Q(β 0 ) − Q(β) − ρ−2(s) kβ − β 0 k2 )2
2ρ+ (1)kβ 0 − βk2
4(Q(β) − Q(β 0 )) ρ−2(s) kβ − β 0 k2
2ρ+ (1)kβ 0 − βk2
ρ− (s)
=
(Q(β 0 ) − Q(β)).
ρ+ (1)
≤−
(15)
(from (a + b)2 ≥ 4ab)
It follows that
|F 0 − F |(Q(β) − min Q(β + ηei ))
η,j
0
≥|F − F |(Q(β) −
≥|F 0 − F |(Q(β) −
≥
min
Q(β + ηej ))
min
Q(β + η(βj0 − βj )ej ))
j∈F 0 −F,η
j∈F 0 −F,η
ρ− (s)
(Q(β) − Q(β 0 )),
ρ+ (1)
(from Eq. (15))
which proves the claim.
Proof of Theorem 1
Proof. Assume that the algorithm terminates at some number larger than s − k̄. Then we consider the first time k = s − k̄.
Denote the support of β (k) as F (k) . Let F 0 = F̄ ∪ F (k) and β 0 = arg minsupp(β)⊂F 0 Q(β). One can easily verify that
1485
1486
1487
1488
1489
1490
1491
1492
1493
1494
1495
1496
1497
1498
1499
1500
1501
1502
1503
1504
1505
1506
1507
1508
1509
1510
1511
1512
1513
1514
1515
1516
1517
1518
1519
1520
1521
1522
1523
1524
1525
1526
1527
1528
1529
1530
1531
1532
1533
1534
1535
1536
1537
1538
1539
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
1540
1541
1542
1543
1544
1545
1546
1547
1548
1549
1550
1551
1552
1553
1554
1555
1556
1557
1558
1559
1560
1561
1562
1563
1564
1565
1566
1567
1568
1569
1570
1571
1572
1573
1574
1575
1576
1577
1578
1579
1580
1581
1582
1583
1584
1585
1586
1587
1588
1589
1590
1591
1592
1593
1594
|F̄ ∪ F (k) | ≤ s. We consider the very recent (k − 1) step and have
δ (k) =Q(β (k−1) ) − min Q(β (k−1) + ηei )
η,i
ρ− (s)
(Q(β (k−1) ) − Q(β 0 ))
ρ+ (1)|F 0 − F (k−1) |
ρ− (s)
≥
(Q(β (k) ) − Q(β 0 ))
ρ+ (1)|F 0 − F (k−1) |
ρ− (s)
ρ− (s) (k)
0 2
0
(k)
0
kβ
−
β
k
≥
hOQ(β
),
β
−
β
i
+
2
ρ+ (1)|F 0 − F (k−1) |
2
ρ− (s)
≥
kβ (k) − β 0 k2 (from OQ(β 0 )F 0 = 0)
2ρ+ (1)|F 0 − F (k−1) |
≥
(16)
where the first inequality is due to Lemma 5 and the second inequality is due to Q(β (k) ) ≤ Q(β (k−1) ). From Lemma 3,
we have
2ρ+ (1)
2ρ+ (1)
kβ (k) − β̄k2 = 0
kβ (k) − β̄k2
(17)
δ (k) ≤ (k)
|F − F̄ |
|F − F̄ |
Combining Eq. (16) and (17), we obtain that
k(β (k) − β̄)k2 ≥
ρ− (s)
2ρ+ (1)
2
|F 0 − F̄ |
kβ (k) − β 0 k2 ,
− F (k−1) |
|F 0
which implies that
kβ (k) − β̄k ≥ tkβ (k) − β 0 k,
where
ρ− (s)
t :=
2ρ+ (1)
s
ρ− (s)
=
2ρ+ (1)
s
|F (k) − F (k) ∩ F̄ |
|F 0 − F (k) | + 1
ρ− (s)
=
2ρ+ (1)
s
|F (k) − F (k) ∩ F̄ |
|F̄ − F (k) ∩ F̄ | + 1
ρ− (s)
=
2ρ+ (1)
s
|F (k) | − |F (k) ∩ F̄ |
|F̄ | − |F (k) ∩ F̄ | + 1
ρ− (s)
=
2ρ+ (1)
s
k − |F (k) ∩ F̄ |
k̄ − |F (k) ∩ F̄ | + 1
|F 0 − F̄ |
− F (k−1) |
|F 0
s
ρ− (s)
(s − k̄)
≥
(from k = s − k̄ and s ≥ 2k̄ + 1)
2ρ+ (1) (k̄ + 1)
s
ρ+ (s)
≥
+ 1 (from the assumption on s).
ρ− (s)
It follows
tkβ (k) − β 0 k ≤ kβ (k) − β̄k ≤ kβ (k) − β 0 k + kβ 0 − β̄k
(from Eq. (3))
which implies that
(t − 1)kβ (k) − β 0 k ≤ kβ 0 − β̄k.
(18)
1595
1596
1597
1598
1599
1600
1601
1602
1603
1604
1605
1606
1607
1608
1609
1610
1611
1612
1613
1614
1615
1616
1617
1618
1619
1620
1621
1622
1623
1624
1625
1626
1627
1628
1629
1630
1631
1632
1633
1634
1635
1636
1637
1638
1639
1640
1641
1642
1643
1644
1645
1646
1647
1648
1649
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
1650
1651
1652
1653
1654
1655
1656
1657
1658
1659
1660
1661
1662
1663
1664
1665
1666
1667
1668
1669
1670
1671
1672
1673
1674
1675
1676
1677
1678
1679
1680
1681
1682
1683
1684
1685
1686
1687
1688
1689
1690
1691
1692
1693
1694
1695
1696
1697
1698
1699
1700
1701
1702
1703
1704
Next we have
Q(β (k) ) − Q(β̄) =Q(β (k) ) − Q(β 0 ) + Q(β 0 ) − Q(β̄)
ρ+ (s) (k)
ρ− (s) 0
kβ − β 0 k2 −
kβ − β̄k2
2
2
≤(ρ+ (s) − ρ− (s)(t − 1)2 )/2kβ (k) − β 0 k2
≤
≤0.
Since the sequence Q(β (k) ) is strictly decreasing, we know that Q(β (k+1) ) < Q(β (k) ) ≤ Q(β̄). However, from Lemma 4
we also have Q(β̄) ≤ Q(β (k+1) ). Thus it leads to a contradiction. This indicates that the algorithm terminates at some
integer not greater than s − k̄.
B. Proofs of FoBa-gdt
Next we consider Algorithm 1 with FoBa-gdt; specifically we will prove Theorem 5 and Theorem 2. Our proof strategy is
similar to FoBa-obj.
Lemma 6. If |OQ(β)j | ≥ , then we have
Q(β) − min Q(β + ηej ) ≥
η
2
.
2ρ+ (1)
Proof. Consider the LHS:
Q(β) − min Q(β + ηej )
η
= max Q(β) − Q(β + ηej )
η
ρ+ (1) 2
η
η
2
ρ+ (1) 2
= max −ηOQ(β)j −
η
η
2
|OQ(β)j |2
≥
2ρ+ (1)
2
≥
.
2ρ+ (1)
≥ max −hOQ(β), ηej i −
It completes the proof.
This lemma implies that δ (k0 ) ≥
2
2ρ+ (1)
for all k0 = 1, · · · , k, and
Q(β (k0 −1) ) − min Q(β (k0 −1) + ηej ) ≥ δ (k0 ) ≥
η
2
,
2ρ+ (1)
if |OQ(β (k0 −1) )j | ≥ .
Lemma 7. (General backward criteria). Consider β (k) with the support F (k) in the beginning of each iteration in Algorithm 1 with FoBa-obj. We have for any β̄ ∈ Rd with the support F̄
(k)
kβF (k) −F̄ k2 = k(β (k) − β̄)F (k) −F̄ k2 ≥
δ (k)
2
|F (k) − F̄ | ≥
|F (k) − F̄ |.
ρ+ (1)
2ρ+ (1)2
(19)
1705
1706
1707
1708
1709
1710
1711
1712
1713
1714
1715
1716
1717
1718
1719
1720
1721
1722
1723
1724
1725
1726
1727
1728
1729
1730
1731
1732
1733
1734
1735
1736
1737
1738
1739
1740
1741
1742
1743
1744
1745
1746
1747
1748
1749
1750
1751
1752
1753
1754
1755
1756
1757
1758
1759
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
1760
1761
1762
1763
1764
1765
1766
1767
1768
1769
1770
1771
1772
1773
1774
1775
1776
1777
1778
1779
1780
1781
1782
1783
1784
1785
1786
1787
1788
1789
1790
1791
1792
1793
1794
1795
1796
1797
1798
1799
1800
1801
1802
1803
1804
1805
1806
1807
1808
1809
1810
1811
1812
1813
1814
Proof. We have
(k)
|F (k) − F̄ | min Q(β (k) − βj ej ) ≤
j∈F (k)
X
(k)
Q(β (k) − βj ej )
j∈F (k) −F̄
≤
X
(k)
Q(β (k) ) − OQ(β (k) )j βj
j∈F (k) −F̄
≤|F (k) − F̄ |Q(β (k) ) +
+
ρ+ (1) (k) 2
(βj )
2
ρ+ (1)
k(β (k) − β̄)F (k) −F̄ k2 .
2
The second inequality is due to OQ(β (k) )j = 0 for any j ∈ F (k) − F̄ and the third inequality is from β̄F (k) −F̄ = 0. It
follows that
δ (k)
ρ+ (1)
(k)
k(β (k) − β̄)F (k) −F̄ k2 ≥ |F (k) − F̄ |( min Q(β (k) − βj ej ) − Q(β (k) )) ≥ |F (k) − F̄ |
,
2
2
j∈F (k)
which implies the claim using δ (k) ≥
2
2ρ+ (1) .
Lemma 8. Let β̄ = arg minsupp(β)∈F̄ Q(β). Consider β (k) in the beginning of each iteration in Algorithm 1 with FoBaobj. Denote its support as F (k) . Let s be any integer larger than |F (k) − F̄ |. If take >
then we have Q(β
(k)
√
2 2ρ+ (1)
ρ− (s) kOQ(β̄)k∞
) ≥ Q(β̄).
Proof. We have
0 >Q(β (k) ) − Q(β̄)
ρ− (s) (k)
kβ − β̄k2
2
ρ− (s) (k)
≥hOQ(β̄)F (k) −F̄ , (β (k) − β̄)F (k) −F̄ i +
kβ − β̄k2
2
ρ− (s) (k)
≥ − kOQ(β̄)k∞ k(β (k) − β̄)F (k) −F̄ k1 +
kβ − β̄k2
2
q
ρ− (s) (k)
kβ − β̄k2
≥ − kOQ(β̄)k∞ |F (k) − F̄ |kβ (k) − β̄k +
2
√
2ρ+ (1) ρ− (s) (k)
≥ − kOQ(β̄)k∞ kβ (k) − β̄k2
+
kβ − β̄k2 (from Lemma 7)
!
2
√
ρ− (s) kOQ(β̄)k∞ 2ρ+ (1)
=
−
kβ (k) − β̄k2
2
√
2 2ρ+ (1)
>0. (from >
kOQ(β̄)k∞ )
ρ− (s)
≥hOQ(β̄), β (k) − β̄i +
It proves our claim.
Proof of Theorem 5
Proof. From Lemma 8, we only need to consider the case Q(β (k) ) ≥ Q(β̄). We have
0 ≥ Q(β̄) − Q(β (k) ) ≥ hOQ(β (k) ), β̄ − β (k) i +
ρ− (s)
kβ̄ − β (k) k2 ,
2
in FoBa-obj,
1815
1816
1817
1818
1819
1820
1821
1822
1823
1824
1825
1826
1827
1828
1829
1830
1831
1832
1833
1834
1835
1836
1837
1838
1839
1840
1841
1842
1843
1844
1845
1846
1847
1848
1849
1850
1851
1852
1853
1854
1855
1856
1857
1858
1859
1860
1861
1862
1863
1864
1865
1866
1867
1868
1869
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
1870
1871
1872
1873
1874
1875
1876
1877
1878
1879
1880
1881
1882
1883
1884
1885
1886
1887
1888
1889
1890
1891
1892
1893
1894
1895
1896
1897
1898
1899
1900
1901
1902
1903
1904
1905
1906
1907
1908
1909
1910
1911
1912
1913
1914
1915
1916
1917
1918
1919
1920
1921
1922
1923
1924
which implies that
ρ− (s)
kβ̄ − β (k) k2 ≤ − hOQ(β (k) ), β̄ − β (k) i
2
= − hOQ(β (k) )F̄ −F (k) , (β̄ − β (k) )F̄ −F (k) i
≤kOQ(β (k) )F̄ −F (k) k∞ k(β̄ − β (k) )F̄ −F (k) k1
q
≤ |F̄ − F (k) ||β̄ − β (k) k.
We obtain
kβ̄ − β
(k)
2
k≤
ρ− (s)
q
|F̄ − F (k) |.
It follows that
42
|F̄ − F (k) | ≥kβ̄ − β (k) k2
ρ− (s)2
≥k(β̄ − β (k) )F̄ −F (k) k2
=kβ̄F̄ −F (k) k2
≥γ 2 |{j ∈ F̄ − F (k) : |β̄j | ≥ γ}|
=
82
|{j ∈ F̄ − F (k) : |β̄j | ≥ γ}|,
ρ− (s)2
which implies that
|F̄ − F (k) | ≥ 2|{j ∈ F̄ − F (k) : |β̄j | ≥ γ}| = 2(|F̄ − F (k) | − |{j ∈ F̄ − F (k) : |β̄j | < γ}|)
⇒|F̄ − F (k) | ≤ 2|{j ∈ F̄ − F (k) : |β̄j | < γ}|.
The first inequality is obtained from Eq. (20)
kβ̄ − β
(k)
2
k≤
ρ− (s)
q
|F̄ −
F (k) |
√ q
2 2
≤
|j ∈ F̄ − F (k) : |β̄j | < γ|.
ρ− (s)
Next, we consider
Q(β̄) − Q(β (k) )
ρ− (s)
kβ̄ − β (k) k2
2
ρ− (s)
=hOQ(β (k) )F̄ −F (k) , (β̄ − β (k) )F̄ −F (k) i +
kβ̄ − β (k) k2 (from OQ(β (k) )F (k) = 0)
2
ρ− (s)
≥ − kOQ(β (k) )k∞ kβ̄ − β (k) k1 +
kβ̄ − β (k) k2
2
q
ρ− (s)
≥ − |F̄ − F (k) |kβ̄ − β (k) k +
kβ̄ − β (k) k2
2
2
q
ρ− (s)
(k)
(k)
≥
kβ̄ − β k − |F̄ − F |/ρ− (s) − 2 |F̄ − F (k) |/(2ρ− (s))
2
≥hOQ(β (k) ), β̄ − β (k) i +
≥ − 2 |F̄ − F (k) |/(2ρ− (s))
≥−
2
|{j ∈ F̄ − F (k) : |β̄j | < γ}|.
ρ− (s)
(20)
1925
1926
1927
1928
1929
1930
1931
1932
1933
1934
1935
1936
1937
1938
1939
1940
1941
1942
1943
1944
1945
1946
1947
1948
1949
1950
1951
1952
1953
1954
1955
1956
1957
1958
1959
1960
1961
1962
1963
1964
1965
1966
1967
1968
1969
1970
1971
1972
1973
1974
1975
1976
1977
1978
1979
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
1980
1981
1982
1983
1984
1985
1986
1987
1988
1989
1990
1991
1992
1993
1994
1995
1996
1997
1998
1999
2000
2001
2002
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
2013
2014
2015
2016
2017
2018
2019
2020
2021
2022
2023
2024
2025
2026
2027
2028
2029
2030
2031
2032
2033
2034
It proves the second inequality. The last inequality in this theorem is obtained from
2
|F (k) − F̄ |
2ρ+ (1)2
≤k(β (k) − β̄)F (k) −F̄ k2
≤kβ
(k)
(from Lemma 7)
2
− β̄k
42
|F̄ − F (k) |
≤
ρ− (s)2
82
≤
|{j ∈ F̄ − F (k) : |β̄j | < γ}|.
ρ− (s)2
It completes the proof.
Next we will study the upper bound of “k” when Algorithm 1 terminates.
Lemma 9. (General forward step) Let β = arg minsupp(β)⊂F Q(β). For any β 0 with support F 0 and i ∈ {i : |OQ(β)i | ≥
maxj |OQ(β)j |}, we have
|F 0 − F |(Q(β) − min Q(β + ηei )) ≥
η
ρ− (s)
(Q(β) − Q(β 0 )).
ρ+ (1)
Proof. The following proof follows the idea of Lemma A.3 in (Zhang, 2011b). Denote i∗ as arg maxi |OQ(β)i |. For all
j ∈ {1, · · · , d}, we define
ρ+ (1) 2
Pj (η) = ηsgn(βj0 )OQ(β)j +
η .
2
It is easy to verify that minη Pj (η) = −
|OQ(β)j |2
2ρ+ (1)
and
min Pi (η) ≤ min Pi∗ (η) = min Pj (η) ≤ min Pj (η).
η
η
j,η
j
Denoting u = kβF0 0 −F k1 , we obtain that
X
u min Pj (η) ≤
j
|βj0 |Pj (η)
j∈F 0 −F
=η
X
βj0 OQ(β)j +
j∈F 0 −F
uρ+ (1) 2
η
2
uρ+ (1) 2
η
2
uρ+ (1) 2
=ηhβ 0 − β, OQ(β)i +
η (from OQ(β)F = 0)
2
ρ− (s) 0
uρ+ (1) 2
≤η(Q(β 0 ) − Q(β) −
kβ − βk2 ) +
η .
2
2
=ηhβF0 0 −F , OQ(β)F 0 −F i +
Taking η = (Q(β) − Q(β 0 ) +
ρ− (s)
0
2 kβ
− βk2 )/uρ+ (1) on both sides, we get
2
Q(β) − Q(β 0 ) + ρ−2(s) kβ − β 0 k2
(Q(β) − Q(β 0 ))ρ− (s)kβ − β 0 k2
u min Pj (η) ≤ −
≤−
,
j
2ρ+ (1)u
ρ+ (1)u
where it uses the inequality (a + b)2 ≥ 4ab. From Eq. (21), we have
min Pi (η) ≤ min Pj (η)
η
j
(Q(β) − Q(β 0 ))ρ− (s)kβ − β 0 k2
ρ+ (1)u2
ρ− (s)
≤−
(Q(β) − Q(β 0 )),
ρ+ (1)|F 0 − F |
≤−
(21)
2035
2036
2037
2038
2039
2040
2041
2042
2043
2044
2045
2046
2047
2048
2049
2050
2051
2052
2053
2054
2055
2056
2057
2058
2059
2060
2061
2062
2063
2064
2065
2066
2067
2068
2069
2070
2071
2072
2073
2074
2075
2076
2077
2078
2079
2080
2081
2082
2083
2084
2085
2086
2087
2088
2089
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
2090
2091
2092
2093
2094
2095
2096
2097
2098
2099
2100
2101
2102
2103
2104
2105
2106
2107
2108
2109
2110
2111
2112
2113
2114
2115
2116
2117
2118
2119
2120
2121
2122
2123
2124
2125
2126
2127
2128
2129
2130
2131
2132
2133
2134
2135
2136
2137
2138
2139
2140
2141
2142
2143
2144
where we use
kβ−β 0 k2
u2
kβ−β 0 k2
k(β−β 0 )F 0 −F k2
=
≥
1
|F 0 −F | .
Finally, we use
min Q(β + ηei ) − Q(β) ≤ min Q(β + ηsgn(βi0 )ei ) − Q(β) ≤ min Pi (η)
η
η
η
to prove the claim.
Proof of Theorem 2
Proof. Please refer to the proof of Theorem 1.
C. Proofs of RSCC
Proof of Theorem 3
Proof. First from the random matrix theory (Vershynin, 2011), we have that for any random matrix X ∈ Rn×d with
independent sub-gaussian isotropic random rows or columns, there exists a constant C0 such that
√
n − C0
p
p
kXhk √
kXhk
≤ max
≤ n + C0 s log d
khk0 ≤s khk
khk0 ≤s khk
s log d ≤ min
(22)
holds with high probability.
From the mean value theorem, for any β 0 , β ∈ Ds , there exists a point θ in the segment of β 0 and β satisfying
Q(β 0 ) − Q(β) − h∇Q(β), α − βi =
=
1 0
(β − β)T
2
n
1 0
(β − β)T ∇2 Q(θ)(β 0 − β)
2
!
1X T 2
X ∇ li (Xi. θ, yi )Xi. + ∇2 R(θ) (β 0 − β)
n i=1 i. 1
(from θ ∈ Ds )
!
n
1X − T
−
λ Xi. Xi. + λR I (β 0 − β)
n i=1
−
λ
1
= (β 0 − β)T
X T X + λ−
I
(β 0 − β)
R
2
n
1
≥ (β 0 − β)T
2
=
λ−
λ−
kX(β 0 − β)k2 + R kβ 0 − βk2
2n
2
(23)
Similarly, one can easily obtain
Q(β 0 ) − Q(β) − h∇Q(β), α − βi ≤
λ+
λ+
kX(β 0 − β)k2 + R kβ 0 − βk2
2n
2
Using (22), we have
p
p
√
√
( n − C0 s log d)2 kβ 0 − βk2 ≤ kX(β 0 − β)k2 ≤ ( n + C0 s log d)2 kβ 0 − βk2
Together with (23) and (24), we obtain
!2
r
1 −
s log d 0
λR + λ− 1 − C0
kβ − βk2 ≤ Q(β 0 ) − Q(β) − h∇Q(β), α − βi
2
n
!2
r
1
s log d 0
+
≤ λ+
1 + C0
kβ − βk2 ,
R +λ
2
n
(24)
2145
2146
2147
2148
2149
2150
2151
2152
2153
2154
2155
2156
2157
2158
2159
2160
2161
2162
2163
2164
2165
2166
2167
2168
2169
2170
2171
2172
2173
2174
2175
2176
2177
2178
2179
2180
2181
2182
2183
2184
2185
2186
2187
2188
2189
2190
2191
2192
2193
2194
2195
2196
2197
2198
2199
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
2200
2201
2202
2203
2204
2205
2206
2207
2208
2209
2210
2211
2212
2213
2214
2215
2216
2217
2218
2219
2220
2221
2222
2223
2224
2225
2226
2227
2228
2229
2230
2231
2232
2233
2234
2235
2236
2237
2238
2239
2240
2241
2242
2243
2244
2245
2246
2247
2248
2249
2250
2251
2252
2253
2254
which implies the claims (5a), (5a), and (5c) by taking n ≥ Cs log d where C = C02 /(1 −
√
2/2)2 .
Next we apply this result to prove the rest part. In Algorithm 1, since choose n ≥ Cs log d, we have that ρ− (s), ρ+ (s),
and κ(s) in Algorithm 1 with FoBa-obj satisfy the bounds in (5). To see why s chosen in (6) satisfies the condition in (3),
we verify the right hand side of (3):
" s
RHS = (k̄ + 1)
ρ+ (s)
+1
ρ− (s)
!
2ρ+ (1)
ρ− (s)
#2
√
≤ 4(k̄ + 1)( κ + 1)2 κ2 ≤ s − k̄.
√
Therefore, Algorithm 1 terminates at most 4κ2 ( κ + 1)2 (k̄ + 1) iterations with high probability from Theorem 1. The
claims for Algorithm 1 with FoBa-gdt can be proven similarly.
2255
2256
2257
2258
2259
2260
2261
2262
2263
2264
2265
2266
2267
2268
2269
2270
2271
2272
2273
2274
2275
2276
2277
2278
2279
2280
2281
2282
2283
2284
2285
2286
2287
2288
2289
2290
2291
2292
2293
2294
2295
2296
2297
2298
2299
2300
2301
2302
2303
2304
2305
2306
2307
2308
2309
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
2310
2311
2312
2313
2314
2315
2316
2317
2318
2319
2320
2321
2322
2323
2324
2325
2326
2327
2328
2329
2330
2331
2332
2333
2334
2335
2336
2337
2338
2339
2340
2341
2342
2343
2344
2345
2346
2347
2348
2349
2350
2351
2352
2353
2354
2355
2356
2357
2358
2359
2360
2361
2362
2363
2364
Supplemental Material: Additional Experiments
D. Additional Experiments
We conduct additional experiments using two models: logistic regression and linear-chain CRFs. Four algorithms (FoBagdt, FoBa-obj, and their corresponding forward greedy algorithms, i.e., Forward-obj and Forward-gdt) are compared on
both synthetic data and real world data. Note that comparisons of FoBa-obj and L1-regularization methods can be found
in previous studies (Jalali et al., 2011; Zhang, 2011a).
It is hard to evaluate ρ− (s) and ρ+ (s) in practice, and we typically employ the following strategies to set δ in FoBa-obj
and FoBa-gdt:
• If we have the knowledge of F̄ (e.g., in synthetic simulations), we can compute the true solution β̄. δ and are given
as δ = Q(β̄) − minα,j ∈/ F̄ Q(β̄ + αej ) and = kOQ(β̄)k∞ .
• We can change the stopping criteria in both FoBa-obj and FoBa-gdt based on the sparsity of β (k) , that is, when the
number of nonzero entries in β (k) exceeds a given sparsity level, the algorithm terminates.
We employed the first strategy only in synthetic simulations for logistic regression and the second strategy in all other
cases.
D.1. Experiments on Logistic Regression
L2 -regularized logistic regression is a typical example of models with smooth convex loss functions:
Q(β) =
1
1X
log(1 + exp(−yi Xi. β)) + λ||β||2 .
n i
2
where Xi. ∈ Rd , that is, the ith row of X, is the ith sample and yi ∈ {1, −1} is the corresponding label. This is a binary
classification problem for finding a hyperplane defined by β in order to separate two classes of data in X. log(1 + exp(.))
defines the penalty for misclassification. The `2 -norm is used for regularization in order to mitigate overfitting. The
gradient of Q(β) is computed by
∂Q(β)
1 X −yi exp(−yi Xi. β) T
=
X + λβ.
∂β
n i 1 + exp(−yi Xi. β) i.
D.1.1. S YNTHETIC DATA
We first compare FoBa-obj and FoBa-gdt with Forward-obj and Forward-gdt5 using synthetic data generated as follows.
The data matrix X ∈ Rn×d consistes of two classes of data (each row is a sample) from i.i.d. Gaussian distribution
N (β ∗ , Id×d ) and N (−β ∗ , Id×d ), respectively, where the true parameter β ∗ is sparse and its nonzero entries follow i.i.d.
uniform distribution U[0, 1]. The two classes are of the same size. The norm of β ∗ is normalized to 5 and its sparseness
ranges from 5 to 14. The vector y is the class label vector with values being 1 or -1. We set λ = 0.01, n = 100, and
d = 500. The results are averaged over 50 random trials.
Four evaluation measures are considered in our comparison: F-measure (2|F (k) ∩ F̄ |/(|F (k) | + |F̄ |)), estimation error
(kβ (k) − β̄k/kβ̄k), objective value, and the number of nonzero elements in β (k) (the value of k when the algorithm
terminates). The results in Fig. 3 suggest that:
• The FoBa algorithms outperform the forward algorithms overall, especially in F-measure (feature selection) performance;
• The FoBa algorithms are likely to yield sparser solutions than the forward algorithms, since they allow for the removal
of bad features;
5
Forward-gdt is equivalent to the orthogonal matching pursuit in (Zhang, 2009).
2365
2366
2367
2368
2369
2370
2371
2372
2373
2374
2375
2376
2377
2378
2379
2380
2381
2382
2383
2384
2385
2386
2387
2388
2389
2390
2391
2392
2393
2394
2395
2396
2397
2398
2399
2400
2401
2402
2403
2404
2405
2406
2407
2408
2409
2410
2411
2412
2413
2414
2415
2416
2417
2418
2419
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
0.46
9
0.79
0.035
8.5
0.43
0.42
FoBa−gdt
forward−gdt
FoBa−obj
forward−obj
0.41
0.4
5
6
7
8
9
10
11
12
13
0.77
0.0345
objective
estimation error
0.44
# of nonzero entries
0.78
0.45
F−measure
2420
2421
2422
2423
2424
2425
2426
2427
2428
2429
2430
2431
2432
2433
2434
2435
2436
2437
2438
2439
2440
2441
2442
2443
2444
2445
2446
2447
2448
2449
2450
2451
2452
2453
2454
2455
2456
2457
2458
2459
2460
2461
2462
2463
2464
2465
2466
2467
2468
2469
2470
2471
2472
2473
2474
0.76
0.75
0.034
0.74
FoBa−gdt
forward−gdt
FoBa−obj
forward−obj
0.73
0.72
0.71
14
5
sparsity
6
7
FoBa−gdt
forward−gdt
FoBa−obj
forward−obj
0.0335
0.033
8
9
10
11
12
13
14
5
6
7
8
sparsity
9
10
11
12
13
8
7.5
7
6.5
6
5.5
FoBa−gdt
forward−gdt
FoBa−obj
forward−obj
5
4.5
14
sparsity
5
6
7
8
9
10
11
12
13
14
sparsity
Figure 3. Comparison for F-measure, estimation error, objective value, and the number of nonzero elements. The horizontal axis is the
sparsity number of the true model ranging from 5 to 14.
Table 3. Computation time (seconds) on synthetic data (top: logistic regression; bottom: CRF).
S
FoBa-gdt
Forward-gdt
FoBa-obj
Forward-obj
5
8
11
14
1.96e-2
1.16e-2
1.53e-2
1.51e-2
0.65e-2
0.76e-2
1.05e-2
1.00e-2
1.25e+1
1.52e+1
1.83e+1
2.29e+1
1.24e+1
1.52e+1
1.80e+1
2.25e+1
10
15
20
25
30
1.02e+0
1.85e+0
2.51e+0
3.86e+0
5.13e+0
0.52e+0
1.05e+0
1.53e+0
2.00e+0
3.00e+0
3.95e+1
5.53e+1
6.89e+1
8.06e+1
9.04e+1
1.88e+1
2.65e+1
3.33e+1
3.91e+1
4.39e+1
• There are minor differences in estimation errors and objective values between the FoBa algorithms and the forward
algorithms;
• FoBa-obj and FoBa-gdt perform similarly. The former gives better objective values and the latter is better in estimation
error;
• FoBa-obj and Forward-obj decrease objective values more quickly than FoBa-gdt and Forward-gdt since they employ
the direct “goodness” measure (reduction of the objective value).
As shown in Table 3, FoBa-gdt and Forward-gdt are much more efficient than FoBa-obj and Forward-obj, because FoBa-obj
and Forward-obj solve a large number of optimization problems in each iteration.
D.1.2. UCI DATA
We next compare FoBa-obj and FoBa-gdt on UCI data sets. We use λ = 10−4 in all experiments. Note that the sparsity
numbers here are different from those in the past experiment. Here “S” denotes the number of nonzero entries in the output.
We use three evaluation measures: 1) training classification error, 2) test classification error, and 3) training objective value
(i.e., the value of Q(β (k) )). The datasets are available online6 . From Table 4, we observe that
• FoBa-obj and FoBa-gdt obtain similar training errors in all cases;
• FoBa-obj usually obtain a lower objective value than FoBa-gdt, but this does not imply that FoBa-obj selects better
features. Indeed, FoBa-gdt achieves lower test errors in several cases.
We also compare the computation time FoBa-obj and FoBa-gdt and found that FoBa-gdt was empirically at least 10 times
faster than FoBa-obj (detailed results omitted due to space limitations). In summary, FoBa-gdt has the same theoretical
6
http://www.csie.ntu.edu.tw/˜cjlin/libsvmtools/datasets
2475
2476
2477
2478
2479
2480
2481
2482
2483
2484
2485
2486
2487
2488
2489
2490
2491
2492
2493
2494
2495
2496
2497
2498
2499
2500
2501
2502
2503
2504
2505
2506
2507
2508
2509
2510
2511
2512
2513
2514
2515
2516
2517
2518
2519
2520
2521
2522
2523
2524
2525
2526
2527
2528
2529
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
2530
2531
2532
2533
2534
2535
2536
2537
2538
2539
2540
2541
2542
2543
2544
2545
2546
2547
2548
2549
2550
2551
2552
2553
2554
2555
2556
2557
2558
2559
2560
2561
2562
2563
2564
2565
2566
2567
2568
2569
2570
2571
2572
2573
2574
2575
2576
2577
2578
2579
2580
2581
2582
2583
2584
Table 4. Comparison of different algorithms in terms of training error, testing error, and objective function value (from left to right) on
a1a, a2a, and w1a data sets (from top to bottom). The values of n denotes the number of training/testing samples.
S
objective
training error
testing error
a1a (FoBa-obj/FoBa-gdt), n = 1605/30956, d = 123
10
20
30
40
50
60
70
556/558
517/529
499/515
490/509
484/494
481/484
480/480
0.169/0.17
0.163/0.16
0.151/0.145
0.150/0.146
0.146/0.141
0.14/0.141
0.138/0.139
0.165/0.164
0.163/0.160
0.162/0.158
0.162/0.159
0.162/0.161
0.166/0.161
0.166/0.163
a2a (FoBa-obj/FoBa-gdt), n = 2205/30296, d = 123
10
20
30
40
50
60
70
870/836
801/810
775/790
758/776
749/764
743/750
740/742
0.191/0.185
0.18/0.177
0.172/0.168
0.162/0.167
0.163/0.166
0.162/0.161
0.162/0.158
0.174/0.160
0.163/0.157
0.165/0.156
0.163/0.155
0.162/0.157
0.163/0.160
0.163/0.161
w1a (FoBa-obj/FoBa-gdt), n = 2477/47272, d = 300
10
20
30
40
50
60
70
574/595
424/487
341/395
288/337
238/282
215/226
198/206
0.135/0.125
0.0969/0.0959
0.0813/0.0805
0.0704/0.0715
0.06/0.0658
0.0547/0.0553
0.0511/0.0511
0.142/0.127
0.11/0.104
0.0993/0.0923
0.089/0.0853
0.0832/0.0825
0.0814/0.0818
0.0776/0.0775
guarantee as FoBa-obj, and empirically FoBa-dgt achieves competitive in terms of empirical performance; in terms of
computational time, FoBa-gdt is much more efficient.
D.2. Simulations on Linear-Chain CRFs
Another typical class of model family with smooth convex loss functions is conditional random fields (CRFs) (Lafferty
et al., 2001; Sutton & McCallum, 2006), which is most commonly used in segmentation and tagging problems with respect
to sequential data. Let Xt ∈ RD , t = 1, 2, · · · , T be a sequence of random vectors. The corresponding labels of Xt ’s are
stored in a vector y ∈ RT . Let β ∈ RM be a parameter vector and fm (y, y 0 , xt ), m = 1, · · · , M , be a set of real-valued
feature functions. A linear-chain CRFs will then be a distribution Pβ (y|X) that takes the form
T
1 Y
Pβ (y|X) =
exp
Z(X) t=1
(
M
X
)
βm fm (yt , yt−1 , Xt )
m=1
where Z(X) is an instance-specific normalization function
Z(X) =
T
XY
y t=1
(
exp
M
X
)
βm fm (yt , yt−1 , Xt ) .
(25)
m=1
In order to simplify the introduction below, we assume that all Xt ’s are discrete random vectors with limited states. If we
have training data X i and y i (i = 1, · · · , I) we can estimate the value of the parameter β by maximizing the likelihood
2585
2586
2587
2588
2589
2590
2591
2592
2593
2594
2595
2596
2597
2598
2599
2600
2601
2602
2603
2604
2605
2606
2607
2608
2609
2610
2611
2612
2613
2614
2615
2616
2617
2618
2619
2620
2621
2622
2623
2624
2625
2626
2627
2628
2629
2630
2631
2632
2633
2634
2635
2636
2637
2638
2639
Forward-Backward Greedy Algorithms for General Convex Smooth Functions over A Cardinality Constraint
Q
i
Pβ (y i |X i ), which is equivalent to minimizing the negative log-likelihood:
min : Q(β) := − log
β
I
Y
!
i
i
Pβ (y |X )
i=1
=−
I X
T X
M
X
i
βm fm (yti , yt−1
, xit )
+
I
X
i=1 t=1 m=1
log Z(X i ).
i=1
The gradient is computed by
XX
X 1 ∂Z(X i )
∂Q(β)
i
=−
fm (yti , yt−1
, Xti ) +
∂βm
Z(X i ) ∂βm
t
i
i
Note that it would be extremely expensive (the complexity would be O(2T )) to directly calculate Z(X i ) from (25), since
i
)
the sample space of y is too large. So is ∂Z(X
∂βm . The sum-product algorithm can reduce complexity to polynomial time in
terms of T (see (Sutton & McCallum, 2006) for details).
In this experiment, we use a data generator provided in Matlab CRF7 . We omit a detailed description of the data generator
here because of space limitations. We generate a data matrix X ∈ {1, 2, 3, 4, 5}T ×D with T = 800 and D = 4 and the
corresponding label vector y ∈ {1, 2, 3, 4}T (four classes)8 . Because of our target application, i.e., sensor selection, we
only enforced sparseness to the features related to observation (56 in all) and the features w.r.t. transitions remained dense.
Fig. 4 shows the performance, averaged over 20 runs, with respect to training error, test error, and objective value. We
observe from Fig 4:
• FoBa-obj and Forward-obj gives lower objective values, training error, and test error than FoBa-gdt and Forward-gdt
when the sparsity level is low.
• The performance gap between different algorithms becomes smaller when the sparsity level increases.
• The performance of FoBa-obj is quite close to that of Forward-obj, while FoBa-gdt outperforms Forward-gdt particularly when the sparsity level was low.
The bottom of Table 3 shows computation time for all four algorithms. Similar to the logistic regression case, the gradient
based algorithms (FoBa-gdt and Forward-gdt) are much more efficient than the objective based algorithms FoBa-obj and
Forward-obj. From Table 3, FoBa-obj is computationally more expensive than Forward-obj, while they are comparable in
the logistic regression case. The main reason for this is that the evaluation of objective values in the CRF case is more
expensive than that in the logistic regression case. These results demonstrate the potential of FoBa-gdt.
0.32
0.3
FoBa−gdt
forward−gdt
FoBa−obj
forward−obj
0.35
0.3
testing error
0.28
0.26
0.24
0.22
0.25
0.2
0.2
0.18
FoBa−gdt
forward−gdt
FoBa−obj
forward−obj
650
objective value on training data
FoBa−gdt
forward−gdt
FoBa−obj
forward−obj
0.34
training error
2640
2641
2642
2643
2644
2645
2646
2647
2648
2649
2650
2651
2652
2653
2654
2655
2656
2657
2658
2659
2660
2661
2662
2663
2664
2665
2666
2667
2668
2669
2670
2671
2672
2673
2674
2675
2676
2677
2678
2679
2680
2681
2682
2683
2684
2685
2686
2687
2688
2689
2690
2691
2692
2693
2694
600
550
500
450
0.16
400
0.15
0.14
10
12
14
16
18
20
sparsity
22
24
26
28
30
10
12
14
16
18
20
sparsity
22
24
26
28
30
10
12
14
16
18
20
22
24
26
28
30
sparsity
Figure 4. Comparison of different algorithms in terms of training error and test error on synthetic data for CRF. The horizontal axis is
the sparsity number of the true model ranging from 10 to 30.
7
8
http://www.di.ens.fr/˜mschmidt/Software/crfChain.html
We here choose a small sample size because of the high computational costs of FoBa-obj and Forward-obj.
2695
2696
2697
2698
2699
2700
2701
2702
2703
2704
2705
2706
2707
2708
2709
2710
2711
2712
2713
2714
2715
2716
2717
2718
2719
2720
2721
2722
2723
2724
2725
2726
2727
2728
2729
2730
2731
2732
2733
2734
2735
2736
2737
2738
2739
2740
2741
2742
2743
2744
2745
2746
2747
2748
2749