FAMILY OF INVARIANT CANTOR SETS AS ORBITS OF DIFFERENTIAL EQUATIONS
advertisement

FAMILY OF INVARIANT CANTOR SETS AS ORBITS OF
DIFFERENTIAL EQUATIONS
YI-CHIUAN CHEN
Institute of Mathematics, Academia Sinica, Taipei 11529, Taiwan
Email: YCChen@math.sinica.edu.tw
TEL: +886 2 27851211 ext. 307
FAX: +886 2 27827432
Abstract
The invariant Cantor sets of the logistic map gµ (x) = µx(1 − x) for µ > 4 are hyperbolic and
form a continuous family. We show that this family can be obtained explicitly through solutions of
infinitely coupled differential equations due to the hyperbolicity. The same result also applies to the
tent map Ta (x) = a(1/2 − |1/2 − x|) for a > 2.
Keywords: logistic map, tent map, Cantor sets, implicit function theorem, hyperbolicity, antiintegrable limit
2000 Mathematics Subject Classification: 34K23, 37D05, 37E05
Running Title: Cantor Sets as Orbits of Differential Equations
1
1
Introduction
that Λµ forms a C 1 -family of Cantor sets. Likewise, Ea forms a C 1 -family of Cantor sets when
There is no doubt that the families of logistic
a increases from 2 to ∞.
maps gµ (x) = µx(1 − x) and tent maps Ta (x) =
The prime objective of this paper is to for-
a(1/2 − |1/2 − x|) play significant roles in the de-
mulate as well as visualize these families numer-
velopment of dynamical systems. We refer the
ically by showing that they are solutions of in-
readers to the references [Devaney, 1989; Góra &
finitely coupled differential equations. Regarding
Boyarsky, 2003; Katok & Hasselblatt, 1995; de
these invariant Cantor sets as orbits of differen-
Melo & van Strien 1993] for details. It is well
tial equations will bring some new insight into
known [Brin & Stuck, 2002; Elaydi, 2000; Robin-
the study of nonlinear maps.
son, 1995] that the bounded orbits of the logistic
In the next section, we state an important
map form a Cantor set Λµ in the interval [0, 1]
theorem and use it to derive the desired infinitely
when the parameter µ is greater than 4, and that
coupled differential equations. Then, in Section
the set Ea of bounded orbits of the tent map with
3 we apply the equations to the logistic maps to
a > 2 is also a Cantor set in [0, 1]. The set Λµ
obtain families of some interesting orbits. Section
(resp. Ea ) is invariant under the iterates of gµ
T
−n
(resp. Ta ) and is given by Λµ = ∞
0 gµ ([0, 1])
T
−n
(resp. Ea = ∞
0 Ta ([0, 1])) since any point lying
4 is devoted to the tent map case. At the last
section, we discuss the relation of our study with
the novel theory of anti-integrability [Aubry &
outside the interval [0, 1] would be iterated even-
Abramovici, 1990; Chen, 2005; MacKay & Meiss,
tually to −∞. Let f : R → R be a C 1 -function
1992].
on the interested domain, and suppose that Λ is
a compact invariant set for f . Then Λ is called a
2
hyperbolic set for f if there exist C > 0 and λ > 1
such that for all x ∈ Λ and n ≥ 1 we have
Hyperbolicity of Orbits
Let x be defined by x = {xi }, i ≥ 0. Then
x is an orbit of a map f with parameter if
|Df n (x)| ≥ Cλn
and only if xi+1 = f (xi ). Let l∞ be the Bawith C and λ independent of x. It has been
nach space of bounded sequences, l∞ := {x| xi ∈
known [Brin & Stuck, 2002; Elaydi, 2000; Robin-
R are bounded for all i ≥ 0}, endowed with the
son, 1995] that Λµ and Ea are hyperbolic for gµ
sup norm. Then x being an orbit can be rephrased
and Ta , respectively. This fact implies that both
as it is a zero of the following function on l∞ ,
Λµ and Ea persist under perturbations. ThereF (·, ) : l∞ → l∞ ,
fore, when µ varies from 4 to infinity, we expect
2
x 7→ {Fi (x, )}i≥0 ,
(1)
with Fi (x, ) := xi+1 − f (xi ).
or
Theorem 2.1. Let Λ be a compact invariant set
Dxi+1 () − Dx f (xi ())Dxi () − D f (xi ()) = 0
for the
C 1 -map
f : R → R, then the following
(4)
three statements are equivalent.
for every i ≥ 0. Eq. (4) is what we employ in
• The orbit x = {x0 , x1 , . . .} is hyperbolic with
the next section to find the orbits of the logistic
any x0 ∈ Λ.
map.
• The Fréchet derivative Dx F (x, ) is an invertible linear map of l∞ .
3
Infinitely Coupled Differential
• The linear non-autonomous difference equation
Equations
ξi+1 − Df (xi )ξi = 0,
i≥0
(2)
Here, let us concentrate first on the logistic family
has no non-trivial bounded solutions.
with µ > 4.
Theorem 2.1 is valid not only for one-dimensional
Having defined the function F in Eq. (1),
maps, but also for any n-dimensional maps with
let Fi (x, ) = xi+1 − −1 xi (1 − xi ). A sequence
n ≥ 1 (and with some modification of the defi-
x = {xi }i≥0 is then a bounded orbit of the logistic
nition of hyperbolicity). We refer the readers to
map
[Aubry et al., 1992; Lanford, 1985; Palmer, 2000]
xi 7→ xi+1 = f (xi ) = −1 xi (1 − xi )
(5)
for a more detailed account. Nonetheless, for the
completeness sake, we give a proof for n = 1 case
if and only if F (x, ) = 0 provided = 1/µ 6= 0.
in the Appendix Section.
Then Eq. (4) gives rise to
The invertibility of the linear map Dx F (x, )
− Dxi+1 + (1 − 2xi ) Dxi = xi+1 ,
(6)
implies, by the implicit function theorem, that
the orbit x forms a C 1 -function of , x(), as with 0 < < 1/4. Equation (6) is a differential-
varies and that this function is unique as long
difference equation, with which we arrive at a
as the linear map remains invertible. In particu-
system of infinitely coupled differential equations
!
N
X
Y
Dxi =
N
(1 − 2xi+k )−1 xi+1+N , (7)
lar, x() is a solution of the following functional
differential equation
Dx() = −Dx F (x(), )−1 D F (x(), ).
N ≥0
k=0
with 0 < < 1/4. In order to solve Eq. (7),
(3)
we have to specify initial conditions with respect
In other words,
to . As approaches zero (i.e. µ approaches
Dx F (x(), ) Dx() + D F (x(), ) = 0,
infinity), it has been shown in [Chen, 2007] that
3
the set of bounded orbits of the logistic map con-
itinerary sequences are, in the following way. The
verges to the set Σ consisting of sequences of 0’s
orbit point xi+1 satisfies
and 1’s,
Dxi+1 =
Σ := {α = {α0 , α1 , α2 , . . .}| αi = 0 or 1}.
X
N
N ≥0
(8)
N
Y
!
(1 − 2xi+1+k )−1
xi+2+N ,
k=0
which is an equation of the same form and with
This result enables us to employ the following
the same initial condition as Eq. (7). Thus, xi+1
initial conditions xi (0) = 0 or xi (0) = 1 for every
and hence xi+n for all n ≥ 0 are identical to xi .
i ≥ 0 so as to solve Eq. (7).
This fact yields
Suppose x is an orbit which is bounded away
Dxi =
from 1/2. Define its itinerary sequence {αi }i≥0
X
N (1 − 2xi )−N −1 xi
N ≥0
to be αi = 0 if xi < 1/2 and αi = 1 if xi > 1/2.
=
Since for every i ≥ 0 the solution xi () of Eq.
(7) depends C 1 on and is bounded away from
xi
.
1 − 2xi − The solution of the above equation is nothing but
1/2, the itinerary sequence of {xi ()}i≥0 is just
xi = xi (1 − xi ) + C
{xi (0)}i≥0 . This means the itinerary sequences
for the family of solutions x() do not change, all
with the integral constant C = 0. Hence xi () =
identical to x(0).
0 or 1 − for all integer i ≥ 0.
In the following four subsections, we inves-
{xi (0)}i≥0 = {x0 (0), . . . , xl (0), 1, 0, 0, . . .}
tigate some typical orbits which are often stud-
3.2
ied in dynamical system: fixed points, eventually
With the help of some existing results for the
fixed points, and periodic orbits.
logistic map, the itinerary sequence in this case
implies that {xi }i≥0 is an eventually fixed point
3.1
{xi (0)}i≥0 = {0, 0, . . .} or {1, 1, . . .}
Recall that the logistic map has two fixed points,
in such a way that xl+2+i = 0 for all i ≥ 0. Also,
√
it implies that xl+1 = 1, xl = (1 ± 1 − 4)/2,
thereby the only point whose itinerary sequence
and that xl−1 can be obtained by solving
is {0, 0, . . .} is the fixed point x = 0, while the
−xl + xl−1 (1 − xl−1 ) = 0.
only point whose itinerary sequence is {1, 1, . . .}
(9)
is the other fixed point x = 1 − . Therefore, for
Once xl−1 is obtained, we can further find xl−2 ,
every i, the solution of Eq. (7) must be xi () = 0
xl−3 and so on by using Eq. (9).
for xi (0) = 0 and xi () = 1 − for xi (0) = 1.
Alternatively, we show how to find the or-
These solution can also be solved directly from
bit directly from Eq. (7). First observe that
Eq. (7), without knowing what the associated
{xl+2+i }i≥0 satisfies an equation of the same form
4
AntiFormula.nb
3
In[10]:= Plot@Evaluate@Table@x@iD@tD, 8i, 0, 6<D ê. allorbitsD,
8t, 0, 0.24997<, AspectRatio −> 1, PlotPoints → 50, PlotDivision → 40,
MaxBend → 1, Compiled → False, PlotStyle → PointSize@0.0001D,
Frame → True, FrameLabel → 8"1êμ", "The set g−8
μ H0L", "", ""<D
1
0.8
The set g−8
μ H0L
0.6
0.4
0.2
0
0
0.05
0.1
0.15
0.2
0.25
1êμ
Out[10]=
Graphics
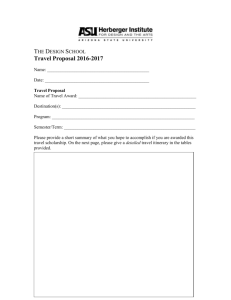
Figure 1: The horizontal axis represents the value of (= 1/µ). Given 0 < < 0.25, the depicted
Display@"D:\smile\DONE\AntiLog\CantorLog.eps", %, "EPS"D
−8
points are the set g1/
(0), which comprises 256 points.
Graphics
5
AntiFormula.nb
4
In[11]:= Plot@Evaluate@Table@x@iD@tD, 8i, 0, 6<D ê. allorbitsD,
8t, 0.2, 0.24997<, AspectRatio → 1, PlotPoints → 50, PlotDivision → 40,
MaxBend → 1, Compiled → False, PlotStyle → PointSize@0.0001D,
Frame → True, FrameLabel → 8"1êμ", "The set g−8
μ H0L", "", ""<D
1
0.8
The set g−8
μ H0L
0.6
0.4
0.2
0
0.2
0.21
0.22
0.23
0.24
0.25
1êμ
Out[11]=
Graphics
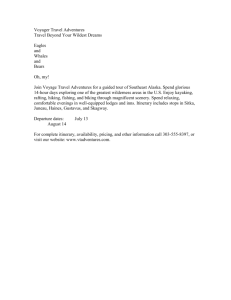
Figure 2: Finer structure of Fig. 1 for 0.2 ≤ < 0.25.
Periodic solutions of period seven :
ODE0 =
1
t
1
i
j
x@1D@tD +
x@2D@tD +
j
1 − 2 x@0D@tD 1 − 2 x@1D@tD
1−
k 1 − 2 x@0D@tD
t
t
16
x@3D@tD +
1 − 2 x@0D@tD 1 − 2 x@1D@tD 1 − 2 x@2D@tD
t
t
t
1
x@4D@tD +
x@0D '@tD
1
t7
as Eq. (7) and has initial conditions xl+2+i (0) =
The procedure can be continued until x0 is ob-
0 for all i ≥ 0. Thus, xl+2+i () = 0 for all i ≥ 0
tained. By virtue of Eq. (7), xi is solvable once
in the light of Subsection 3.1. Hence
all xi+k are known for all k ≥ 1 for then we have
D(xi − x2i )
Dxl+1 = 0,
= (1 − 2xi ) Dxi
and we get that xl+1 () is a constant which is 1,
the value of xl+1 (0). Therefore,
= xi+1 +
X
N
N ≥1
Dxl = (1 − 2xl )−1
⇒ xl (1 − xl ) = + C
√
(1 − 1 − 4)/2
⇒ xl =
(1 + √1 − 4)/2
(10)
if xl (0) =
N
Y
1
xi+1+N .
Integration gives
N ≥1
Z
with the integral constant C = 0. Having found
(1 − 2xi+k )−1
k=1
xi − x2i + C
Z
X
=
xi+1 +
N
0
!
=
xi+1 + xl , the value of xl−1 can be found in turn.
X
N
Y
!
−1
(1 − 2xi+k )
xi+1+N d
k=1
N
N ≥0
N
Y
!
−1
(1 − 2xi+1+k )
xi+2+N d
k=0
Z
=
Dxl−1
xi+1 + Dxi+1 d
= xi+1 .
= (1 − 2xl−1 )−1 xl + (1 − 2xl−1 )−1 (1 − 2xl )−1
1√
−1 1
= (1 − 2xl−1 )
∓
1 − 4 ± √
2 2
1 − 4
The result is identical to Eq. (9) since the integration constant C is zero.
This procedure
of finding solutions for xi , though is not very
Z
⇒
(1 − 2xl−1 ) dxl−1
Z
1
d √
=
∓
1 − 4 d
2 d 2
p
√
1
1 − 1 − 2 + 2 1 − 4
2
p
√
1 1 − 1 − 2 − 2 1 − 4
2
⇒
xl−1 =
p
√
1
1
+
1
−
2
+
2
1
−
4
2
p
√
1 1 + 1 − 2 − 2 1 − 4
2
(0, 0)
(0, 1)
if (xl−1 (0), xl (0)) =
(1, 0)
(1, 1).
straightforward, is fairly efficient by means of
numerical computation.
We have known that
xl+1 = 1 and that xl+2+i = 0 whenever i ≥ 0.
What we need to do by numerics is to solve the
initial value problem of an l + 1-coupled ODEs
arising from Eq. (7). Figures. 1 and 2 illustrate
the numerical results for l = 6 and x0 (0), . . . , x6 (0)
being 0’s or 1’s. Notice that x0 () has 27 choices
when 6= 0 which correspond to 27 choices of
itinerary sequences {x0 (0), . . . , x6 (0), 1, 0, 0, . . .}.
Consequently, x1 () has 26 choices whose itinerary
sequences are {x1 (0), . . . , x6 (0), 1, 0, 0, . . .}, and
7
x2 () has 25 choices whose itinerary sequences are
the other hand, we can get them numerically
{x2 (0), . . . , x6 (0), 1, 0, 0, . . .}, etc., finally, x6 ()
through system (7). Under condition (11), the
has 21 choices with associated itinerary sequences
system (7) of infinitely coupled equations reduces
being {x6 (0), 1, 0, 0, . . .}. Since x0 (), x1 (), . . . ,
to an l + 1-coupled ODEs of the following form:
!
l−i
N
X
Y
Dxi =
N
(1 − 2xi+k )−1 xi+1+N
and xl () all have different itinerary sequences,
S
their union 6i=0 xi () consists of 254 (= 21 +
22
+ . . . + 27 )
points. In fact, it is not difficult to
see that {0} ∪ {1} =
−1
g1/
(0),
−
x6 () ∪ {0} ∪ {1} ∈
In this case x0 is such a point that
!
−1
(1 − 2xi+k )
∞
X
equals
N
N
Y
N =l−i+1
k=0
∞
X
l−i
Y
=
N
N =l−i+1
to 1 − , the value of the non-zero fixed point of
the logistic map g1/ . Similar to the case in the
k=l−i+1
preceding subsection, we know that
= −
l−i
Y
!
(1 − 2xi+k )−1
xi+1+N
!
(1 − 2xi+k )−1
!
(−1 + 2)−1
(1 − )
!
(1 − 2xi+k )−1
l−i+1 .
k=0
(11)
Figures 3 and 4 depict the values of x0 , . . . , xl
and that
when l = 7 and x0 (0), . . . , x7 (0) are 0’s or 1’s.
Note that for all possible choices of initial condiS
tions x0 (0), . . . , x7 (0), the set 7i=0 xi () consists
D(xl − xl 2 )
= xl+1 +
0 ≤ i ≤ l,
k=0
N
Y
xl+1+i = 1 − ∀ i ≥ 0
l−i+1 ,
in which we have used that fact that
{xi (0)}i≥0 = {x0 (0), . . . , xl (0), 1, 1, . . .}
l+1
g1/
(x0 )
k=0
k=0
−2
−3
g1/
(0), x5 () ∪ x6 () ∪ {0} ∪ {1} ∈ g1/
(0), . . . ,
S
6
−8
and that
i=0 x6 () ∪ {0} ∪ {1} ∈ g1/ (0).
3.3
N =0
l−i
Y
X
N (−1 + 2)−N (1 − )
of 256 (= 28 ) points. This is because x7 () has 21
N ≥1
= 1 − 2.
choices corresponding to itinerary sequences be-
This leads to x2l − xl + − 2 = 0 for both
ing {x7 (0), 1, 1, . . .}, and x6 () has also 21 choices
xl (0) = 0 and 1. So, we arrive at an expression
whose itinerary sequences are {x6 (0), 0, 1, 1, . . .}.
of xl which can also be obtained by solving re-
(For a given x7 (0) = x6 (0), the two sequences
currence relation (9):
√
1 − 1 − 4 + 42 /2
xl =
1 + √1 − 4 + 42 /2
{x7 (0), 1, 1, . . .} and {x6 (0), 1, 1, 1, . . .} are iden-
if xl (0) =
tical.) There are 22 choices for x5 (), correspond-
0
ing to itinerary sequences {x5 (0), x6 (0), 0, 1, 1, . . .}.
1.
Similarly, there are 27 choices for x0 (), with itinerary
The values of xl−1 , xl−2 , . . . , x0 can then be ob-
sequences {x0 (0), . . . , x6 (0), 0, 1, 1, . . .}.
tained by making use of Eq. (9) recursively. On
fore, it is readily to see that the total number of
8
There-
AntiFormula-22.nb
3
In[12]:= Plot@Evaluate@Table@x@iD@tD, 8i, 0, 6<D ê. allorbitsD,
8t, 0, 0.24997<, AspectRatio −> 1, PlotPoints → 50, PlotDivision → 40,
MaxBend → 1, Compiled → False, PlotStyle → PointSize@0.0001D,
Frame → True, FrameLabel → 8"1êμ", "The set g−8
μ H1−1êμL", "", ""<D
1
The set g−8
μ H1−1êμL
0.8
0.6
0.4
0.2
0
0
0.05
0.1
0.15
0.2
0.25
1êμ
Out[12]=
Graphics
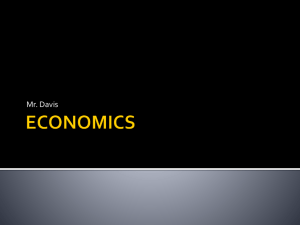
Figure 3: The horizontal axis represents the value of (= 1/µ) . Given 0 < < 0.25, the depicted
Display@"D:\smile\DONE\AntiLog\CantorLog.eps", %, "EPS"D
−8
points are the set g1/
(1 − ), which comprises 256 points.
Graphics
9
AntiFormula-22.nb
4
In[13]:= Plot@Evaluate@Table@x@iD@tD, 8i, 0, 7<D ê. allorbitsD,
8t, 0.2, 0.24997<, AspectRatio → 1, PlotPoints → 50, PlotDivision → 40,
MaxBend → 1, PlotStyle → PointSize@0.0001D, Compiled → False,
Frame → True, FrameLabel → 8"1êμ", "The set g−8
μ H1−1êμL", "", ""<D
1
The set g−8
μ H1−1êμL
0.8
0.6
0.4
0.2
0
0.2
0.21
0.22
0.23
1êμ
Out[13]=
Graphics
Figure 4: Finer structure of Fig. 3 for 0.2 ≤ < 0.25.
10
0.24
0.25
AntiFormulaPer.nb
points in
S7
i=0 xi ()
is
21 +21 +22 +. . .+27
4
Plot Evaluate Table x i t , i, 0, 6
. Per71 , t, 0, 0.24997 , AspectRatio −> 1,
PlotPoints → 25, PlotDivision → 20, MaxBend → 1, PlotStyle → PointSize 0.0001 ,
Frame → True, FrameLabel → "1 μ", "The set of a period−7 orbit", "", "" ;
= 256.
1
A remark is that, according to [Devaney, 1989;
Medio & Raines, 2006] for example, both the sets
0.8
−n
−n
limn→∞ g1/
(0) and limn→∞ g1/
(1 − ) are dense
The set of a period−7 orbit
in Λ1/ , thus it has no surprise that Figs. 1 and
3 look almost the same at first glance.
3.4
{xi (0)}i≥0 = {x0 (0), . . . , xl (0)}
0.6
0.4
With repeated x0 (0), . . . , xl (0), the initial condi0.2
tions are periodic with period l + 1, thereby it
must be that xi = xi+l+1 for all i ≥ 0. This is
0
because xi+l+1 is a solution of
0
0.05
0.1
1 μ
0.15
0.2
0.25
Display "D:\smile\AntiFormula\Per71.eps", %, "EPS"
Dxi+l+1
=
X
N ≥0
Graphics
N
N
Y
Per71orbits0249 = Flatten Table
!
−1
(1 − 2xi+l+1+k )
AntiFormulaPer.nb
i, x Mod i, 7
0.249
, i, 0, 21
. Per71, 1 ;
Figure 5: The set of periodic solution of period
xi+l+2+N ,
seven
with itinerary sequence
{0011001}.
Plot Evaluate Table x i t , i, 0, 6
. allorbits ,
k=0
t, 0, 0.24997 , AspectRatio −> 1, PlotPoints → 25, PlotDivision → 20,
MaxBend → 1, PlotStyle → PointSize 0.0001 , Frame → True, Frame → True,
FrameLabel → "1 μ", "The set of a period−7 orbit", "", ""
which has the same form as Eq. (7) and possesses
1
the same initial condition as xi does:
{xi+l+1 (0)}i≥0 = {xl+1 (0), xl+2 (0), . . .}
0.8
The set of a period−7 orbit
= {x0 (0), x1 (0), . . .}.
In order to find the periodic solution xi , 0 ≤ i ≤
l, we solve the following l + 1-coupled differential
0.6
0.4
0.2
0
0
0.05
0.1
1 μ
0.15
0.2
0.25
Graphics
Display "D:\smile\AntiFormula\Per72.eps", %, "EPS"
Figure 6: The set of periodic solution of period
seven with itinerary sequence {0111011}.
11
7
4
equations
For the tent map Ta with parameter a > 2, we
Dxi
=
X
N ≥0
=
The Tent Map with a > 2
∞
X
N
N
Y
!
(1 − 2xi+k )−1
on the domain R \ {1/2}. Rescale the parameter
k=0
l
Y
m(l+1)
m=0
l
X
N
1 − l+1
!m
a by = 1/a 6= 0 and express the tent map by
(1 − 2xi+k )−1
k=0
N
Y
N =0
=
know that 1/2 6∈ Ea and Ta is a smooth function
xi+1+N
xi+1 = f (xi ) = −1 (1/2 − |1/2 − xi |)
!
−1
(1 − 2xi+k )
k=0
l
Y
for all i ≥ 0. Since Ta |Ea and gµ |Λµ are topolog-
!−1
(1 − 2xi+k )−1
ically conjugate to each other when a > 2 and
k=0
l
X
N =0
N
N
Y
(12)
xi+1+N
µ > 4, we infer from [Chen, 2007] that E1/ con-
!
(1 − 2xi+k )−1
xi+1+N
verges to the set Σ of sequences of 0’s and 1’s as
k=0
Λ1/ does when approaches zero. From this fact
with xi+1+l = xi for 0 ≤ i ≤ l. In Fig. 5, the set
S6
i=0 xi () of the period-7 orbit with initial condi-
and from Eq. (4), we obtain
− Dxi+1 + (−1)xi (0) Dxi = xi+1
tion {xi (0)}i≥0 = {0011001} is depicted. Figure
7 shows the orbit xi () for 0 ≤ i ≤ 21 and var-
(13)
for xi 6= 1/2 for all i ≥ 0. The differential-
ious values of . The cases of initial condition
difference equation above then yields
!
N
X
Y
Dxi =
N
(−1)xi+k (0) xi+1+N , (14)
{xi (0)}i≥0 = {0111011} are illustrated in Figs. 6
and 8.
N ≥0
In this way, we do not have to solve the fol-
k=0
lowing l+1-order recurrence relation arising from
which again will be solved subject to prescribed
Eq. (5)
initial conditions xi (0) for all i ≥ 0.
xi+1 = −1 xi (1 − xi ),
4.1
xi+2 = −1 xi+1 (1 − xi+1 ),
..
.
The equation of xi+1 , which has the same form
{xi (0)}i≥0 = {0, 0, . . .} or {1, 1, . . .}
as Eq. (14), reads
xi+l = −1 xi+l−1 (1 − xi+l−1 ),
Dxi+1 =
xi = −1 xi+l (1 − xi+l ).
X
N ≥0
N
N
Y
!
xi+1+k (0)
(−1)
xi+2+N .
k=0
The initial conditions of the above equation are
still the same, i.e. {xi+1 (0)}i≥0 = {0, 0, . . .} or
12
ListPlot iorbits006, PlotJoined → True, Axes → False, Frame → True, AspectRatio → 0.3,
0.8
0.6
PlotRange → 0, 20 , 0, 1 , PlotStyle → PointSize 0.01 , RGBColor 0, 0, 1
0.4
0.2
1
0.8 2.5 5 7.5 1012.51517.520
0.6
0.4
0.2 Per71o0249, Per71o0249Joined ,
Show
2.5 5 7.51012.51517.520
Per71o018, Per71o018Joined ,
Per71o012, Per71o012Joined , Per71o006, Per71o006Joined ,
Per71o000, Per71o000Joined , FrameLabel → "i", "xi ε ", "", ""
Graphics
1
iorbits000 = Flatten Table
i, x Mod i, 7
0
, i, 0, 21
. allorbits, 1 ;
0.8
xi HεL
io000 = ListPlot iorbits000, Axes → False, Frame → True,
0.6
AspectRatio → 0.3, PlotStyle → PointSize 0.01 , RGBColor 0, 0, 0
1
0.8
0.6
0.4
0.2
0
;
0.4
0.2
05
0
10
0
15
20
5
10
15
20
i
io000Joined =
ListPlot iorbits000, PlotJoined → True, Axes → False, Frame → True, AspectRatio → 0.3,
Graphics
PlotRange → 0, 20 , 0, 1 , PlotStyle → PointSize 0.01 , RGBColor 0, 0, 0
;
Figure 7: Periodic solution of period seven with itinerary sequence {0011001}. Black: = 0, blue:
1
0.8 = 0.06, green: = 0.12, yellow: = 0.18, red: = 0.249.
0.6
0.4
0.2
2.5 5 7.5 1012.51517.520
Show io0249, io0249Joined , io018, io018Joined , io012, io012Joined ,
io006, io006Joined , io000, io000Joined , FrameLabel → "i", "xi ε ", "", ""
1
xi HεL
0.8
0.6
0.4
0.2
0
0
5
10
i
15
20
Graphics
Figure 8: Periodic solution of period seven with itinerary sequence {0111011}. Black: = 0, blue:
= 0.06, green: = 0.12, yellow: = 0.18, red: = 0.249.
13
{1, 1, . . .}. As a result, xi+1 = xi , and hence
The value of xl−1 can be found via Eq. (14) as
xi = x0 for all i ≥ 0. It then follows that
!
N
X
Y
Dxi =
N
(−1)xi (0) xi
well.
N ≥0
=
Dxl−1
k=0
xi /(1 − )
if xi (0) = 0 ∀ i ≥ 0
−x /(1 + )
i
if xi (0) = 1 ∀ i ≥ 0.
= (−1)xl−1 (0) xl + (−1)xl−1 (0) (−1)xl (0)
x
(0)
l−1
2(−1)
0
=
if xl (0) =
(1 − 2)(−1)xl−1 (0)
1.
The solution of this differential equation is easily
So,
found to be
xi (1 − ) = C1
if xi (0) = 0 ∀ i ≥ 0
xi (1 + ) = C2
if xi (0) = 1 ∀ i ≥ 0.
xl−1 =
2
− 2
if (xl−1 (0), xl (0)) =
1 − 2
1 − + 2
The integration constants C1 = 0 and C2 = 1,
(0, 0)
(0, 1)
(1, 0)
(1, 1).
which can be determined by initial conditions at
As before, numerical computation using Eq. (14)
= 0, allow us to deduce that xi () = 0 and
is an efficient way to obtain the orbits. We only
xi () = 1/(1 + ), respectively.
have to tackle the first l + 1-coupled orbits in Eq.
4.2
{xi (0)}i≥0 = {x0 (0), . . . , xl (0), 1, 0, 0, . . .}
(14). Figures 9 and 10 depict the results for l = 6
and for x0 (0), . . . , x6 (0) being 0’s or 1’s.
Alike the logistic case, it must be that xl+1 = 1
and xl+2+i = 0 whenever i ≥ 0. Similar to Eq.
4.3
{xi (0)}i≥0 = {x0 (0), . . . , xl (0), 1, 1, . . .}
(10), this fact yields
With this initial condition, x0 is such a point that
Dxl = (−1)xl (0) xl+1
l+1
T1/
(x0 ) equals to 1/(1+), the value of the non-
= (−1)xl (0) .
And we infer that
xl =
1 − zero fixed point. Because
xl+1+i = 1/(1 + ) ∀ i ≥ 0,
if xl (0) =
0
(15)
we get
1.
Dxl =
X
N ≥0
=
X
N
N
Y
!
xl+k (0)
(−1)
N (−1)xl (0) (−1)N /(1 + )
N ≥0
= (−1)xl (0) /(1 + )2 .
14
xl+1+N
k=0
AntiFormulaTent.nb
2
In[35]:= Plot@Evaluate@Table@x@iD@tD, 8i, 0, 7<D ê. allorbitsD,
8t, 0, 0.49997<, AspectRatio → 1, PlotPoints → 50, PlotDivision → 40,
MaxBend → 1, Compiled → False, PlotStyle → PointSize@0.0001D,
Frame → True, FrameLabel → 8"1êa", "The set T−8
a H0L", "", ""<D
1
The set T−8
a H0L
0.8
0.6
0.4
0.2
0
0
Out[35]=
0.1
0.2
1êa
0.3
0.4
0.5
Graphics
Figure 9: The horizontal axis represents the value of (= 1/a). Given 0 < < 0.5, the depicted points
Display@"D:\smile\DONE\AntiLog\CantorLog.eps", %, "EPS"D
−8
are the set T1/
(0), which comprises 256 points.
Graphics
15
AntiFormulaTent.nb
3
In[36]:= Plot@Evaluate@Table@x@iD@tD, 8i, 0, 7<D ê. allorbitsD, 8t, 0.4, 0.49997<,
AspectRatio → 1, PlotPoints → 50, PlotDivision → 40, MaxBend → 1,
Compiled → False, Frame → True, FrameLabel → 8"1êa", "The set T−8
a H0L", "", ""<D
1
The set T−8
a H0L
0.8
0.6
0.4
0.2
0
0.4
Out[36]=
0.42
0.44
1êa
0.46
Graphics
Figure 10: Finer structure of Fig. 9 for 0.4 ≤ < 0.5.
16
0.48
0.5
This equation can be solved easily to get
xl (0)
xl () = xl (0) + (−1)
is l + 1, then
/(1 + ).
Dxi =
l
X
N
Y
N
N =0
Substituting initial conditions, we arrive at
/(1 + )
0
xl =
if xl (0) =
1/(1 + )
1.
l+1
+ l
Y
Dxi =
−
N =0
l−i
Y
N =0
xi+1+N
k=0
(−1)xi+k (0)
N
N
Y
!
(−1)xi+k (0)
xi+1+N ,
k=0
period-7 solution with prescribed initial condi-
k=0
tion {xi (0)}i≥0 = {0011001}. Figure 15 illustrates the orbit xi () for 0 ≤ i ≤ 21 and five
values of . The case {xi (0)}i≥0 = {0111011} is
shown in Figs. 14 and 16.
k=0
!
(−1)
!−1
with prescribed xi (0) = 0 or 1 for all 0 ≤ i ≤
S
l. Figure 13 depicts the set 6i=0 xi () of the
!
xi+k (0)
l
Y
k=0
(−1)xi (0)+xi+1 (0)+...+xl+1 (0)
1
+
1 + (−1)xl+2 (0) + 2 (−1)xl+2 (0)+xl+3 (0)
+3 (−1)xl+2 (0)+xl+3 (0)+xl+4 (0) + . . .
!
l−i
N
X
Y
=
N
(−1)xi+k (0) xi+1+N
+
1 − l+1
l
X
of the form:
N =0
l−i+1
Dxi+l+1 .
solved are
pled equations reduces to an l + 1-coupled ODEs
(−1)xi+k (0)
(−1)
equations arising from Eqs. (13) or (14) to be
initial condition, the system (14) of infinitely cou-
N
Y
!
xi+k (0)
Because xi+l+1 = xi , the l+1-coupled differential
merical computation, because of the considered
N
xi+1+N
k=0
by means of recurrence relation (12). In our nu-
l−i
X
(−1)xi+k (0)
k=0
As ever, the same solutions can also be obtained
Dxi =
!
l−i+1
,
(1 + )2
5
Conclusion and Discussion
0 ≤ i ≤ l.
Given a map f , we transform the study of its
Figures 11 and 12 depict the values of x0 (), . . . , xl () bounded orbits into the study of the zeros the
when l = 7 and x0 (0), . . . , x7 (0) are 0’s or 1’s.
function F (·, ) of the space l∞ of sequences, as
described in Eq. (1). Assuming the invertibil-
4.4
Periodic initial conditions
ity of Dx F (x, ), we obtain the zeros of F (·, )
The same as in the logistic maps case, an orbit
by solving the functional differential equation (3)
with periodic initial condition implies that the
or equivalently the differential-difference equa-
orbit itself and its itinerary sequence are also pe-
tion (4). One important ingredient is the initial
riodic with the same period. Suppose the period
conditions. In this paper, they are obtained very
naturally by rescaling the parameter from µ to 17
AntiFormulaTent-2.nb
2
In[16]:= Plot@Evaluate@Table@x@iD@tD, 8i, 0, 7<D ê. allorbitsD,
8t, 0, 0.49997<, AspectRatio → 1, PlotPoints → 50, PlotDivision → 40,
MaxBend → 1, Compiled → False, PlotStyle → PointSize@0.0001D,
Frame → True, FrameLabel → 8"1êa", "The set T−8
a H1êH1+1êaLL", "", ""<D
1
The set T−8
a H1êH1+1êaLL
0.8
0.6
0.4
0.2
0
0
0.1
0.2
0.3
0.4
0.5
1êa
Out[16]=
Graphics
Figure
11: The horizontal axis represents the value of (= 1/a). Given 0 < < 0.5, the depicted
Display@"D:\smile\DONE\AntiLog\CantorLog.eps", %, "EPS"D
−8
points are the set T1/
(1/(1 + )), which comprises 256 points.
Graphics
18
AntiFormulaTent-2.nb
3
In[17]:= Plot@Evaluate@Table@x@iD@tD, 8i, 0, 7<D ê. allorbitsD, 8t, 0.4, 0.49997<,
AspectRatio → 1, PlotPoints → 50, PlotDivision → 40, MaxBend → 1, Compiled → False,
Frame → True, FrameLabel → 8"1êa", "The set T−8
a H1êH1+1êaLL", "", ""<D
1
The set T−8
a H1êH1+1êaLL
0.8
0.6
0.4
0.2
0
0.4
0.42
0.44
0.46
0.48
1êa
Out[17]=
Graphics
Figure 12: Finer structure of Fig. 11 for 0.4 ≤ < 0.5.
Display@"D:\smile\DONE\AntiLog\CantorLog02025.eps", %, "EPS"D
Graphics
19
0.5
ListPlot iorbits012, PlotJoined → True, Axes → False, Frame → True, AspectRatio → 0.3,
0.8
0.6
PlotRange → 0, 20 , 0, 1 , PlotStyle → PointSize 0.01 , RGBColor 0, 0, 1
0.4
0.2
1
0.8 2.5 5 7.5 1012.51517.520
0.6
0.4
0.2 Per71o0499, Per71o0499Joined ,
Show
2.5 5 7.51012.51517.520
Per71o036, Per71o036Joined ,
Per71o024, Per71o024Joined , Per71o012, Per71o012Joined ,
Per71o000, Per71o000Joined , FrameLabel → "i", "xi ε ", "", ""
Graphics
1
iorbits000 = Flatten Table
i, x Mod i, 7
0
, i, 0, 21
. allorbits, 1 ;
0.8
xi HεL
io000 = ListPlot iorbits000, Axes → False, Frame → True,
0.6
AspectRatio → 0.3, PlotStyle → PointSize 0.01 , RGBColor 0, 0, 0
1
0.8
0.6
0.4
0.2
0
;
0.4
0.2
05
0
10
0
15
20
5
10
15
20
i
io000Joined =
ListPlot iorbits000, PlotJoined → True, Axes → False, Frame → True, AspectRatio → 0.3,
Graphics
PlotRange → 0, 20 , 0, 1 , PlotStyle → PointSize 0.01 , RGBColor 0, 0, 0
;
Figure 15: Periodic solution of period seven with itinerary sequence {0011001}. Black: = 0, blue:
1
0.8 = 0.12, green: = 0.24, yellow: = 0.36, red: = 0.499.
0.6
0.4
0.2
2.5 5 7.5 1012.51517.520
Show io0499, io0499Joined , io036, io036Joined , io024, io024Joined ,
io012, io012Joined , io000, io000Joined , FrameLabel → "i", "xi ε ", "", ""
1
xi HεL
0.8
0.6
0.4
0.2
0
0
5
10
i
15
20
Graphics
Figure 16: Periodic solution of period seven with itinerary sequence {0111011}. Black: = 0, blue:
= 0.12, green: = 0.24, yellow: = 0.36, red: = 0.499.
20
AntiFormulaTentPer.nb
2
Plot Evaluate Table x i t , i, 0, 6
. Per71 , t, 0, 0.49997 ,
AspectRatio −> 1, PlotPoints → 50, PlotDivision → 40, MaxBend → 1,
Compiled → False, PlotStyle → PointSize 0.0001 , Frame → True,
FrameLabel → "1 a", "The set of a period−7 orbit", "", "" ;
for the logistic maps and from a to in the tent
1
maps case. Recall that the set Σ (defined in formula (8)) with the product topology is a Cantor
0.8
The set of a period−7 orbit
set. From the theory of Dynamical Systems, we
know the fact that the set Λ (E resp.), consist0.6
ing of initial points of all bounded orbits of the
considered map f = g1/ (= T1/ resp.), is also a
0.4
Cantor set for 0 < < 1/4 (0 < < 1/2 resp.).
This fact can also be proved alternatively using
0.2
the so-called anti-integrability (see the enlightening work of Aubry and Abramovici [1990], and
0
0
0.1
0.2
1 a
0.3
0.4
also e.g. [Chen, 2005, 2006, 2007; MacKay &
0.5
Meiss, 1992; Zheng et al., 2002, 2003]). Briefly,
Display "D:\smile\AntiFormula\Per71Tent.eps", %, "EPS"
Graphics
it says the followings. Let x() be a family (with
Figure 13: The set of periodic solution of period
AntiFormulaTentPer.nb
6
respect to ) of bounded orbits for f , the map-
seven
with itinerary sequence
{0011001}.
Plot Evaluate Table x i t , i, 0, 6
. allorbits , t, 0, 0.49997 ,
ping x(0) 7→ x() in the space l∞ be denoted by
AspectRatio −> 1, PlotPoints → 50, PlotDivision → 40, MaxBend → 1,
Compiled → False, PlotStyle → PointSize 0.0001 , Frame → True,
FrameLabel → "1 a", "The set of a period−7 orbit", "", ""
Φ , and let the projection l∞ 3 (x0 , x1 , · · · ) 7→
1
x0 ∈ R be denoted by π, then in [Chen, 2007] it
was proved that the following diagram commute
The set of a period−7 orbit
0.8
σ
−→
Σ
π◦Φ y
0.6
Σ
yπ◦Φ
f
A −→ A
provided that is sufficiently small. In the dia-
0.4
gram, the set A is defined by
0.2
[
A :=
π ◦ Φ (x(0)).
x(0)∈Σ
0
0
0.1
0.2
1 a
0.3
0.4
Note that A = Λ for f = g1/ and A =
0.5
E for f = T1/ .
Graphics
Display "D:\smile\AntiFormula\Per72Tent.eps", %, "EPS"
Hence, f restricted to its
bounded orbits is topologically conjugate to the
Figure 14: The set of periodic solution of period
Bernoulli shift σ on two symbols. The advantage
seven with itinerary sequence {0111011}.
of the proof in [Chen, 2007] is that the conjugacy
21
π ◦ Φ comes automatically and can be realised
[4] Chen, Y.-C. [2005] “Bernoulli shift for sec-
explicitly. In this paper, Φ is realised as the
ond order recurrence relations near the
functional-differential equation (3) by virtue of
anti-integrable limit,” Discrete Contin. Dyn.
the identity
Syst. B 5, 587–598.
[5] Chen, Y.-C. [2006] “Smale horseshoe via the
Φ (x(0)) = x().
anti-integrability,” Chaos Solitons Fractals
That is to say, x() is uniquely determined by
28, 377–385.
x(0), the initial condition of Eq. (3).
[6] Chen, Y.-C. [2007] “Anti-integrability for
It is apparent that the whole framework of
the logistic maps,” Chinese Ann. Math. B
the method presented in this paper can equally
(To appear)
well be put into the study of mappings in the
complex plane. In an article in preparation, we
[7] Devaney, R. L. [1989] An Introduction
shall employ our approach to investigate the Julia
to Chaotic Dynamical Systems, 2nd Ed
sets for the quadratic mapping z 7→ z 2 + C, with
(Addison-Wesley Pub. Co.)
z, C ∈ C.
[8] Elaydi, S. N. [2000] Discrete chaos (Chapman and Hall/CRC)
References
[9] Góra, P. & Boyarsky, A. [2003] “On the sig[1] Aubry, S. & Abramovici, G. [1990] “Chaotic
nificance of the tent map,” Int. J. Bifurca-
trajectories in the standard map: the con-
tion and Chaos 13, 1299–1301.
cept of anti-integrability,” Physica D 43,
[10] Katok, A. & Hasselblatt, B. [1995] Intro199–219.
duction to the Modern Theory of Dynamical
[2] Aubry, S., MacKay, R. S. & Baesens, C.
Systems (Cambridge University Press)
[1992] “Equivalence of uniform hyperbolic-
[11] Lanford, O. E. [1985] “Introduction to hy-
ity for symplectic twist maps and phonon
perbolic sets,” in Regular and Chaotic Mo-
gap for Frenkel-Kontorova models”, Physica
tions in Dynamic Systems, eds. Velo, G. &
D 56, 123–134.
Wightman, A. S. (Plenum Press, New York)
pp. 73-102.
[3] Brin, M. & Stuck, G. [2002] Introduction to
Dynamical Systems (Cambridge University
[12] MacKay, R. S. & Meiss, J. D. [1992] “Can-
Press)
tori for symplectic maps near the antiintegrable limit,” Nonlinearity 5, 149–160.
22
for each i ≥ 0. Equation (16) has a solution
!
N
X Y
ξi = −
Df (xi+k )−1 ηi+N ,
(17)
[13] Medio, A. & Raines, B. [2006] “Inverse limit
spaces arising from problems in economics,”
Preprint.
N ≥0
k=0
which is bounded because |
[14] de Melo, W. & van Strien, S. [1993] One-
QN
−1
k=0 Df (xi+k ) |
=
|DfN +1 (xi )−1 | ≤ C −1 λ−N −1 due to the hyper-
dimensional Dynamics (Springer-Verlag)
bolicity, thus the series on the right hand side of
[15] Palmer, K. J. [2000] Shadowing in Dy-
Eq. (17) can be bounded by a geometric series.
namical Systems: Theory and Applications
The solution is in fact the unique one. If not, and
(Kluwer Academic Pub.)
suppose ξ̃ is another one, then from Eq. (16) we
[16] Robinson, C. [1995] Dynamical Systems:
get
Stability, Symbolic Dynamics, and Chaos
0 = ζi+1 − Df (xi )ζi ,
(CRC Press)
(18)
where ζi = ξ˜i − ξi for every i ≥ 0. Equation
[17] Zheng, Y., Liu, Z. & Huang, D. [2002]
(18) has the solution ζi = Dfi (x0 )ζ0 . This im-
“Discrete soliton-like for KdV prototypes,”
plies ζ0 = Dfi (x0 )−1 ζi and consequently |ζ0 | =
Chaos Solitons Fractals 14, 989–994.
|Dfi (x0 )−1 | |ζi | ≤ C −1 λ−i |ζi | for every i ≥ 1 due
to the hyperbolicity. Therefore, {ζi } cannot be
[18] Zheng, Y., Chen, G. & Liu, Z. [2003] “On
bounded (thence {ξ˜i } does not belong to l∞ ) if
chaotification of discrete systems,” Int. J.
ζ0 6= 0 , and {ζi } is bounded if and only if ζi ≡ 0
Bifurcation and Chaos 13, 3443–3447.
(thence ξ˜i = ξi ) for all i ≥ 0. Hence, for a given
η ∈ l∞ , we have Dx F (x, )−1 η = ξ ∈ l∞ . This
Appendix
says that Dx F (x, ) is invertible.
The second statement implies the third: Equa-
Proof of theorem 2.1. The first statement implies the second: Dx F (x, ) : l∞ → l∞ is a lin-
tion (2) has just the same form as Eq. (18), and
ear map which sends ξ = {ξ0 , ξ1 , ξ2 , . . .} to η =
we have shown that the latter equation has only
{η0 , η1 , η2 , . . .} in such a way that Dx F (x, )ξ =
the trivial bounded solution.
The third statement implies the first: Be-
η with
cause {ξi } is unbounded for ξ0 6= 0, it is apparent
ηi =
X
Dxj Fi (x, )ξj
that there is an integer Nx0 depending on x0 such
j≥0
= ξi+1 − Df (xi )ξi
that
(16)
Nx0
|Df
(x0 )| > 1.
(19)
Let m1 := minx∈Λ {|Df (x)|}. If m1 > 1, then
23
there is nothing to prove since we can choose
to satisfy
C = 1 and λ = m1 . Hence in the rest of the
λk0 mν1 ≥ mN > 1,
proof let us assume that m1 ≤ 1. By virtue of
and let the desired constant N = kν. Then for
the compactness of the set Λ, Eq. (19) will im-
any x0 ∈ Λ and any integer n ≥ N , there are
ply an integer N ≥ 1 and a constant mN such
that
|Dfn (x0 )|
integers j ≥ k, 1 ≤ ν1 , ν2 , . . . , νj+1 ≤ K such
≥ mN > 1 for all x0 ∈ Λ and all
Nν 1
that x0 ∈ Uν1 , f
n ≥ N , and thence for any n ≥ 1 we have the
Nν1 +Nν2 +···+Nνj−1
Uν3 , . . . , f
hyperbolicity:
(x0 ) ∈
Nν1 +···+Nνj
(x0 ) ∈ Uνj , f
Uνj+1 , and such that N = kν ≤ Nν1 + · · · + Nνj +
i = n for some 0 ≤ i < ν. Therefore,
|Dfn (x0 )|
= |DflN (xi )| |Dfi (x0 )|
l i
N
≥
min{|Df (x)|}
min{|Df (x)|}
x∈Λ
|Dfn (x0 )|
Nνj
= |fi ◦ f
x∈Λ
≥ mlN mi1
mi1
(lN +i)/N
=
mN
i/N
mN
≥
Nν1 +Nν2
(x0 ) ∈ Uν2 , f
Nνj−1
◦ f
≥ mi1 λνj λνj−1 . . . λν1
≥ mν1 λj0
≥ mν1 λk0
−1
mN
1
(lN +i)/N
mN
(N −1)/N
mN
n
(since λ0 > 1)
≥ mN
= Cλ
> 1.
(N −1)/N
−1
with C = mN
/mN
1
1/N
, λ = mN , n = lN +
The proof is complete.
i for some l ≥ 0 and 0 ≤ i ≤ N − 1. It remains
to show the existence of such N and mN .
Nx0
The function f is C 1 , so Df
is a contin-
uous function for each fixed x0 in Λ. Thus there
exists a neighbourhood Ux0 of x0 and a constant
Nx0
λx0 > 1 such that |Df
(y)| ≥ λx0 for all y ∈
Ux0 . The open sets {Ux0 | x0 ∈ Λ} cover Λ. Since
Λ is compact, there is a finite number, say K
K
number, of subcovers {Ui }K
i=1 , constants {λi }i=1
all strictly greater than 1, and integers {Ni }K
i=1
such that |DfNi (y)| > λi for all y ∈ Ui . Let
ν = max{N1 , . . . , NK }, λ0 = min{λ1 , . . . , λK }.
Choose an integer k and the desired constant mN
24
Nν1
◦ · · · ◦ f
(x0 )|
(x0 ) ∈