Uncertain Reasoning Using Time-Dynamic Markov Random Field for Sensor-Network Applications
advertisement

Proceedings of the Twenty-Eighth International Florida Artificial Intelligence Research Society Conference
Uncertain Reasoning Using Time-Dynamic Markov
Random Field for Sensor-Network Applications
Shobhit Shakya and Jian Zhang
Computer Science & Engineering Division
Louisiana State University
Baton Rouge, LA 70803
Abstract
of correlations that can be utilized to improve tracking. One
is spatial correlation, that is, a plume is a spatially continuous cloud. Hence, if one observes the plume at a particular
location, it is more likely to observe it at locations nearby.
The second is temporal correlation. A plume may move and
spread over time, particularly when there is wind. If the wind
carries the plume from one location to another over time, it
can be expected that observing the plume at these two locations are correlated given the right time delay.
We propose a framework using Time-Dynamic Markov
Random Field (TD-MRF) to explicitly model these two
types of correlations. In TD-MRF, we represent the state of
the environment as a Markov random field and the correlations (in space and in time) as dependencies among the
random variables. Different from standard inference problem with Markov random field (Kindermann and Snell 1980)
where the structure of the random field is known, in our
framework, part of the MRF structure is unknown and needs
to be determined in the inference process. For example, The
temporal correlation depends on the wind condition. Because there may not be a sensor in the network that detects
the wind situation, the wind condition and hence the structure of the random field that corresponds to the temporal correlation may not be known. We developed a new inference
algorithm for the TD-MRF model. The algorithm does not
require the knowledge of the wind. Rather, it uses an iterative EM (expectation-maximization) approach to infer the
wind condition as well as the most likely plume condition
given the sensor observations.
We conducted a set of experiments to test the TD-MRF
model and the inference algorithm. The results show that
our framework is effective in deducing the plume situation
from very noisy sensor data. The effectiveness of the framework is mainly due to the incorporation of the spatial and
the temporal correlations. The experiment results also show
that our inference algorithm is effective in estimating the
wind condition. The main contributions of our work are: 1) a
time-dynamic MRF model for uncertain reasoning in sensor
network detection and tracking. It enables explicit modeling
of the spatial and the temporal correlation among the sensor
outputs and is shown to be effective in obtaining better detection. 2) A new inference algorithm that does not require
wind knowledge but rather infers that knowledge together
with the plume condition.
Sensor networks are often used in environment monitoring.
We consider uncertain reasoning in sensor network-based
monitoring, in particular, in detecting and tracking plumes
under heavy noise. We extend Markov random field to a new
time-dynamic Markov random field (TD-MRF) and use it to
model the environment. We provide an algorithm for inferring, based on TD-MRF, the plume situation in the environment given noisy sensor output. Our experiments showed that
TD-MRF and our inference framework can lead to better detection and tracking results even when there is a high level of
noise.
1
Introduction
Sensor network is an important technology for environment
monitoring. With the wide deployment of wireless communication infrastructures (e.g., cellphone networks), there are
many scenarios where the sensor network can easily connect to the Internet and data collected by the sensor network can be forwarded (through the Internet) to a powerful computing system for processing. We consider uncertain reasoning in the detection and tracking of a hazardous
plume, e.g., poisonous smoke from a chemical plant. We focus on the scenario where a plume moves and spreads into
an area that is monitored by a sensor network and there exists a strong level of uncertainty in the sensor output. Previously, researchers have explored AI techniques to deal with
uncertainty in sensor networks. However, the problems considered in these work were mainly about tracking a single or
a few objects. Hidden Markov model (HMM) was applied
to solve the problem (Ardo, Astrom, and Berthilsson 2007;
Ma, Schonfeld, and Khokhar 2008; De et al. 2012). Plume
tracking is different from object tracking. A plume covers
a large area and may trigger many sensors. The subset of
sensors that would be triggered depend on the shape of the
plume. Furthermore, the shape as well as the location of the
plume may change over time. This makes most algorithms
for single or multiple objects tracking inapplicable.
In this paper, we explore Markov Random Field (MRF)
based modeling and inference for plume tracking under uncertainty. We use Markov random field to model two types
c 2015, Association for the Advancement of Artificial
Copyright Intelligence (www.aaai.org). All rights reserved.
588
2
at time k. {xk1 , xk2 , . . . , xkd } is the snapshot of the sensor outputs from all sensors at time k. The plume moves over time
under some wind condition. A location that does not see the
plume at some time step may see it at a later step. The seM
M
quence Πx = {{x11 , x12 , . . . , x1d }, . . . , {xM
1 , x2 , . . . , xd }}
gives the evolution/movement of the plume along time as reported by the sensor outputs. (We assume that for a period of
time, wind condition stays the same. Our model and inference focus on this situation. In reality, wind condition may
change over time. We explore and discuss change of wind at
the end of the experiment result section.)
Suppose the sensor outputs are noisy and not reliable.
We would like to reconstruct the true state of the plume
at each sensor location and each time step. We denote
by tki such true state at location li and time step k. (We
focus on a binary scenario where for each location at a
particular time, there are two states: plume present or
plume absent. Hence we encode the true state by 1 or 0
corresponding to presence and absence respectively, i.e.,
tki ∈ {0, 1} for all i and k.) {tk1 , tk2 , . . . , tkd } is a snapshot
of the true states at time step k. The sequence Πt =
M
M
{{t11 , t12 , . . . , t1d }, {t21 , t22 , . . . , t2d }, . . . , {tM
1 , t2 , . . . , td }}
gives the true evolution/movement of the plume in the
region along time. The problem we consider is to infer
Πt from Πx , i.e., to find the true evolution/movement
from noisy sensor observations. We design a time-dynamic
Markov random field to model the problem and use it to
infer the evolution of the plume.
Related Work
Graphical model such as Bayesian network is a commonly used tool to construct probabilistic models and perform deductions in a probabilistic manner. Markov random
field (Kindermann and Snell 1980) is a particular graphical
model that uses undirected graph to represent a distribution.
There are a lot of researches that investigated the application of Markov random field in various scenarios (Diebel
and Thrun 2005; Diebel, Thrun, and Bruenig 2006). In particular, Markov random field has been employed in image processing and denoising (Geman and Geman 1984;
Geman and Reynolds 1992) and vision (Morency, Quattoni, and Darrell 2007). Our work differs from the previous
ones not only because we considered a different application
scenario but also because our application leads to a timedynamic Markov random field. (In the image-processing
scenario, only a static model is needed.) The time-dynamic
nature of the problem requires a different modeling framework and a new inference algorithm.
Sensor network is an area where intensive researches
are being conducted. Detection and tracking are important
applications for sensor network (Bapat, Kulathumani, and
Arora 2005; Shrivastava 2006). Most early work assumed
that there is little noise in sensor output. Detection and tracking are simple under this condition and the main consideration was to reduce power consumption. Recent work has
started to consider tracking under uncertainty. Many approaches have been proposed for tracking single or multiple
objects (Li et al. 2002; Brooks et al. 2004; Zhong et al. 2009;
De et al. 2012). In single (or few) object tracking, the number of the environment configurations, i.e., the locations of
the objects, is limited. Even with limited configurations,
tracking multiple objects becomes difficult when the trajectories of the objects are entangled together. (Oh, Russell, and
Sastry 2009; Oh 2012). Plume tracking is different from object tracking, because a plume may take an irregular shape
which may change over time. With plume, the configuration of the environment corresponds to a subset of locations
in the region that are occupied by the plume. The number of
such configurations can be very large. This makes it impossible to apply the existing object tracking methods. Our model
based on time-dynamic Markov random field can handle the
complex configuration efficiently.
3
3.1
3.2
Time-Dynamic Markov Random Field
The Time-Dynamic Markov Random Field (TD-MRF) is a
graph where each node represents a random variable and the
edges indicate dependencies among the random variables.
(We will use node and random variable interchangeably in
following description.) For each sensor location li and each
time step j, there are two nodes (random variables) in the
TD-MRF. One represents the true state tji . We refer to this
node as ntji (as random variable, ntji ∈ {0, 1}) and denote
by T the collection of all such nodes. The other node represents the sensor output xji and we refer to it as nxji (as
random variable, nxji ∈ [0, 1]). We denote by O the collection of nodes of this type. Note that the value of the node
(random variable) nxji is known from sensor output but the
value of the node (random variable) ntji is unknown.
There is an edge in TD-MRF connecting each node ntji
with its corresponding node nxji . We call such edge an
“observe-truth” edge and denote by Eot the collection of
these edges. There is no edge between nodes in O but the
TD-MRF may contain edges between nodes in T . Based on
the dependency relationship, we can categorize the edges between nodes in T into two types. One is the edges between
two nodes ntki and ntkj that are spatial neighbors, i.e., the
edges connecting the nodes for the true states at two different but neighboring locations in the same time step. This
type of edges is used to model the spatial dependency and we
call them the “spatial-neighbor” edges and denote by Esn
the collection of such edges. Because the sensor locations
Dynamic Markov Random Field for
Detection and Tracking
Problem Definition
Let S = {1, 2, . . . , d} be the set of d sensors. Assume
that we know the location (or relative location) of each
sensor. Denote by li the location of the sensor i. (li may
be a 2-dimensional vector if we are concerned with sensors in a plane or a 3-dimensional vector if height information is available.) Each sensor tries to detect plume in
its neighboring environment. The output from each sensor
is collected by the sensor network periodically and transmitted to a computing center for process and analysis. Let
{1, 2, . . . , M } be the time steps at which the data are collected and let xki ∈ [0, 1] be the sensor output from sensor i
589
TD-MRF with both spatial and temporal dependency
MRF with spatial dependency only
T=
0
T=
1
T=
2
Models
Real World
T=0
T=1
T=2
sensor
nsor
plume
ume
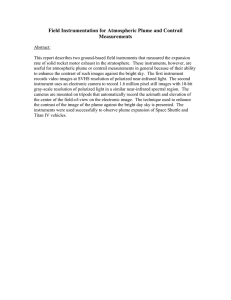
Figure 1: Time-Dynamic Markov Random Field Model for Sensor Network Detection and Tracking
are known, these edges are determined once the sensors are
deployed. If i and j are two neighboring sensors, we have an
edge (ntki , ntkj ) for all k ∈ {1, 2, . . . , M }.
The second type of edges are used to model the evolution of the plume under wind. Intuitively, when wind blows
at a certain speed and toward some direction, it carries the
plume from one location li to another location lj after some
may be related. We
time steps c. Therefore, ntki and ntk+c
j
call such edges the “wind-move” edges and refer to the collection of such edges as Ewm . Not all neighbors of sensor i
are connected to i by a wind-move edge, because the movement of the plume is directional under wind. The relationship, and therefore the wind-move edges, in TD-MRF are
wind-dependent. Because the sensor network may not observe the wind condition directly, Ewm is unknown to TDMRF. Let Ef orward be all the edges connecting a location
at a time step to some location at one time step later, i.e.,
edges of the form (ntki , ntk+1
) for i, j ∈ [d]. We say a subj
set E ⊆ Ef orward is wind-compatible if all the edges in
E connect the nodes that are related because of a particular wind condition. A wind condition is specified by the
speed of the wind and the direction of the wind. Note different wind conditions give rise to different wind-compatible
subset E . We denote by Φ the collection of all the windcompatible subsets, i.e.,
dows that are related due to such movement of the plume.
We define energy functions for the edges in TD-MRF as
the following: for edges in Esn and Ewm , we have
ψ(e = (u, v)) = − [(1 + α)uv + u(1 − v)
+ (1 − u)v + (1 + α)(1 − u)(1 − v)]
where α is a model parameter. (Note that in the above equation, we use node and random variable interchangeably.)
Both u and v are from T and are unknown. Different assignments of values to u and v give different energy for the
corresponding edge. For edges in Eot , we have
1−u
u · ex−0.5
ψ̂(e = (u, x)) = −
+
1 + ex−0.5
1 + ex−0.5
where u ∈ T and x ∈ O. u is an unknown variable and x
is given as sensor output. Different assignment of value to u
leads to different energy. The energy of the whole TD-MRF
is defined to be the sum of the energy on all the edges, in
particular:
ψ(e) +
ψ(e)
ψ̂(e) +
Ψ(T, E) =
e∈Eot
e∈Esn
e∈Ewm
where Ψ(T, E) is the total energy of the whole TD-MRF.
Note that the total energy is a function of two sets of variables, where T is the set of values for all the nodes ntki ,
which is taken from all possible assignments of 0, 1 to {ntki }
and E is a set of wind-compatible edges, which is taken from
Φ. Different T and E give different total energy.
Given the observation, the probability for a particular
combination of T and E is defined to be: P r(T, E) =
1 −Ψ(T,E)
. where Z is a normalizer that ensures the probZe
ability of all combinations of T and E sums to 1. To infer the true evolution of the plume is to find the T (together with E) that maximizes the probability, i.e., solving
maxT,E Z1 e−Ψ(T,E) .
Φ ={E ⊆ Ef orward |E is
wind-compatible to some wind condition}.
Fig. 1 shows an example TD-MRF model. The upper shows
the model and the lower shows the real world environment
with a sensor network consisting of 4 sensors. To simplify
the graph, in the model, we omitted the nodes in O and
only plotted the nodes in T . On the left of the figure, we
show the sensor network and a MRF with only spatial dependency. The right main part of the figure shows an example
plume evolving in the environment and the corresponding
TD-MRF model. The snapshot of each time step is placed
inside the dashed rectangle. Along time, the plume moves to
the right because of the wind. The model captures such evolution by the edges between the nodes in different time win-
3.3
Inferring the State of the TD-MRF
We give an iterative Estimation-Maximization (E-M) algorithm to jointly optimize the estimation of the wind condition together with the estimation of the true states. The main
structure of the EM algorithm is given in Alg. 1
590
1
2
3
4
5
6
7
4
Start with the wind condition v0 that corresponds to no
wind, i.e., v ← v0 ;
while Improvement is made for P r(T, E) do
E ← E 0 ∈ Φ and compatible with v ;
T ← arg maxT 0 P r(T 0 , E);
v ← re-estimate the wind condition from new
values of T obtained in the previous step;
end
return T ;
Algorithm 1: Inference using EM for TD-MRF
4.1
Experiment Setting
We conducted a set of experiments using simulated sensor data to test our detection algorithm. In the simulation,
sensors are located on a grid (30 × 40, total 120 sensors).
There is a source on the grid that generate plume. The plume
spreads following a diffusion process and moves over time
under some wind condition. Ideally, if a sensor detects the
plume, its output is “1” and otherwise, its output is “0”. We
considered the situation where due to noise, the sensors report their detection by a number between 0 and 1. Our simulation used Gaussian noise, i.e., the noise follows a Gaussian
distribution centered at zero. (The noise level is determined
by the standard deviation of the distribution, which we varied from 0.1 to 4.) The sensor output is the sum of the true
state and the noise, truncated if the value is below zero or
above one. The noisy outputs are fed to our algorithm which
then infers the presence of the plume over time at different
sensor locations.
We compared the detection performance among 5 methods: the baseline, a HMM-based approach, our TD-MRF
algorithm, a variant of the TD-MRF algorithm where we
assume the wind condition is known, and a second variant
where the dynamics of the plume over time is not modeled.
We give the details of the methods in the following:
Baseline: Detection of plume’s presence or absence is determined using a simple threshold, i.e. if the sensor output
is greater than the threshold, it is decided that the plume
is present at the location of the corresponding sensor. Otherwise, there is no plume at that location. Because of the
noise used, we set the threshold to be 0.5. bHMM: We divide the area monitored by the sensor network into a number of zones. Similar to the tracking problem considered
in (Monaci and Pandharipande 2012), we view the plume as
an object that travels from one zone to another over time. We
use a hidden Markov model to track the plume. The hidden
states correspond to the zones and indicate that the plume is
in that zone. TD-MRF: This is the algorithm described in
Sec. 3. s-MRF: This variant considers a static MRF model.
That is, at each time step, we infer the the plume locations
using the sensor outputs from that time step. The inference
for a time step is independent from sensor outputs and the
state of the plume in the other time steps. (In s-MRF we
use the “spatial-neighbor” edges but do not use any “windmove” edges.) w-MRF: Similar to TD-MRF, a MRF is used
to model both the dependency between spatial neighbors and
the dependency between the wind-move neighbors. Different from TD-MRF, in this variant, we assume the wind condition is known.
We measured the performance of the above methods using (balanced) F-measure, which is commonly used to quantify detection accuracy. Let n11 be the number of locations
where the plume is present and the detection algorithm also
declares so. Let n01 be the number of locations where the algorithm declares plume but there is no, i.e., the false positive
and n10 be the number of locations where there is plume but
the algorithm declares none, i.e., false negative. The precision of the detection is calculated by n11 /(n11 + n01 ) and
The main computation lies on the maximization (line 4)
and the re-estimation (line 5). We describe the details of
these computations in the following subsections.
Infer True State by TD-MRF Maximization Given a
fixed set of wind-compatible edges, the problem of maximizing the probability with respect to the assignment of
the state values is a standard Markov random field inference problem. We follow the Iterated Conditional Modes
(ICM) algorithm to infer the optimal values. ICM uses an
iterative greedy approach to find an assignment of the state
values that corresponds to a local maximal of the probability. It starts with some initial states for the nodes. In each
iteration, the algorithm exams the nodes one by one and
tries to improve the probability by modifying the state of
that node. We refer the readers to (Kittler and Föglein 1984;
Bishop 2006) for more details of ICM.
Estimate Wind Condition The task we deal with in this
subsection is to infer the wind condition given the values of
the nodes in T . Let the vector v be the wind velocity vector,
i.e., each component of the vector gives the speed of wind
at the direction of the component. (The speed is measured
as the distance traveled within the amount of time during a
time step.) Suppose sensor i at location li detects plume at a
time step. At next time step, the wind would carry the plume
to the location li + v and trigger the sensor at that location.
(Suppose the location is lj .) Let Lt be the set of locations
where the plume is truly present at time t. We have
lj = li + v ∀li ∈ Lt and corresponding lj ∈ Lt+1 .
This gives a set of equations each corresponding to a pair of
locations where the plume is present at time t and then t + 1.
After we sum up the right-hand size and the left-hand side
of these equations and rearrange, we have:
X
1 X
1
v = t+1
lj − t
li .
|L |
|L |
t
t+1
lj ∈L
Experiments
li ∈L
where | · | means the size of a set. Following this, if we know
the true presence of the plume at time t and t + 1, we can
estimate the wind velocity vectorPas the difference between
1
the center of the plume ( |Lt+1
t+1 lj ) at time t + 1
P| lj ∈L
1
and the center at time t ( |Lt | li ∈Lt li ).
Once the estimation of the wind velocity vector is obtained, it is straightforward to construct the edges in the TDMRF that compatible with the wind condition.
591
Figure 2: Example Detection and Tracking. (At each row, the figures from left to right show the evolution of the environment
over time. Upper row: true situation in the environment; Middle row: noisy sensor output; Lower row: detection and tracking
results from TD-MRF using the middle row noisy sensor data as input.)
section. Across all methods, we observe that the detection
accuracy decreases when the noise level increases. When
the noise level is very low, the simple threshold method performs well. However, its accuracy deteriorates quickly when
the noise level increases. w-MRF gives the best performance
when there is significant noise. This indicates that considering the temporal dependency can lead to better performance
under large noise. TD-MRF gives a performance between
that of w-MRF and s-MRF. It shows that our EM algorithm
gives a decent estimation of the wind condition although the
estimation is not perfect. (The performance of TD-MRF is
below that of w-MRF which uses the perfect wind condition
in its inference calculation.) The performance of s-MRF is
below the performance of TD-MRF and w-MRF but above
that of the bHMM and the baseline. It shows that considering
both the temporal and the spatial correlations (as with TDMRF and w-MRF) gives better performance than that from
considering the spatial correlations only (as with s-MRF). It
also shows that for this application scenario, MRF-based approaches are better than traditional HMM-based approaches.
It can be expected that bHMM perform poorly because the
plume may take many different shapes. The plume may not
fully occupy a zone or it may occupy multiple zones but with
partial occupancy at each zone. Also the shape of the plume
may change over time. Good zoning is impossible before
knowing the shape (and the change of shape) of the plume.
Figure 3: Performance of the Methods (w-MRF, TD-MRF,
s-MRF, bHMM and baseline) at Different Noise Levels
the recall of the detection is calculated by n11 /(n11 + n10 ).
F-measure is the harmonic mean of the precision and the recall. Each experiment was repeated 20 times and the average
of the F-measures from the trials was reported as result.
4.2
Experiment Result
Fig. 2 shows an example detection and tracking result. The
first row gives the true state of the environment in the
field where a network of sensors are deployed. A hazardous
plume (black area) spreads across the field from upper-left to
bottom-right by the wind. The second row shows the sensor
outputs. Because there are a lot of noises, the plume signal
becomes extremely fuzzy. The bottom row shows the results
of running TD-MRF algorithm on the noisy sensor outputs
(the second row data). TD-MRF gives good detection results
for plume moving and spreading, even when the sensor outputs are extremely noisy.
The quantitative detection performances measured by F
measure are plotted in Fig. 3. The x-axis represents noise
level, i.e., the standard deviation of the Gaussian noise. The
y-axis represents the performance (F measure). We plot the
performances for the 5 methods mentioned in the previous
Fig. 4 plots the performance of the TD-MRF when the
model parameters α changes. The x-axis represents different
choice of the parameter and the y-axis represents the performance. Recall that, the parameters control the energy difference between an edge that connect two nodes with the same
state and an edge connecting two nodes of different states.
Fig. 4 shows that there is an optimal range for the parameter between 0.5 and 1. This is expected because there should
be a significant difference between the two energy values.
On the other hand, the difference should not be too large to
force the detection to be all ones or all zeros. The model performance is good for a wide range of α. This make model
tuning easier for deployment.
We further tested our method in situations where the wind
592
Bishop, C. M. 2006. Pattern recognition and machine learning. Springer.
Brooks, R.; Friedlander, D.; Koch, J.; and Phoha, S. 2004.
Tracking multiple targets with self-organizing distributed
ground sensors. Journal of Parallel and Distributed Computing 64(7):874–884.
De, D.; Song, W.; Xu, M.; Wang, C.; Cook, D.; and Huo, X.
2012. Findinghumo: Real-time tracking of motion trajectories from anonymous binary sensing in smart environments.
In Proceedings of the 2012 IEEE 32nd International Conference on Distributed Computing Systems, 163–172.
Diebel, J. R., and Thrun, S. 2005. An application of markov
random fields to range sensing. In In NIPS, 291–298.
Diebel, J. R.; Thrun, S.; and Bruenig, M. 2006. A bayesian
method for probable surface reconstruction and decimation.
ACM Trans. Graph 25:39–59.
Geman, S., and Geman, D. 1984. Stochastic relaxation,
gibbs distributions and the bayesian restoration of images.
IEEE Trans. Patt. Anal. Mach. Intell. 6:721–741.
Geman, D., and Reynolds, G. 1992. Constrained restoration
and the recovery of discontinuities. IEEE Trans. Patt. Anal.
Mach. Intell. 14(3):367–383.
Kindermann, R., and Snell, J. 1980. Markov Random Fields
and Their Applications. American Mathematical Society.
Kittler, J., and Föglein, J. 1984. Contextual classification
of multispectral pixel data. Image and Vision Computing
2:13–29.
Li, D.; Wong, K.; Hu, Y.; and Sayeed, A. 2002. Detection, classification, and tracking of targets. Signal Processing Magazine, IEEE 19(2):17–29.
Ma, X.; Schonfeld, D.; and Khokhar, A. 2008. Distributed
multi-dimensional hidden markov model: theory and application in multiple-object trajectory classification and recognition. In Conference of Multimedia Content Access: Algorithms and Systems II (SPIE’08).
Monaci, G., and Pandharipande, A. 2012. Indoor user zoning and tracking in passive infrared sensing systems. In 20th
European Signal Processing Conference, 1089–1093.
Morency, L. P.; Quattoni, A.; and Darrell, T. J. 2007.
Latent-dynamic discriminative models for continuous gesture recognition. In Proceedings of CVPR07, 1–8.
Oh, S.; Russell, S.; and Sastry, S. 2009. Markov chain monte
carlo data association for multi-target tracking. Automatic
Control, IEEE Transactions on 54(3):481–497.
Oh, S. 2012. A scalable multi-target tracking algorithm
for wireless sensor networks. International Journal of Distributed Sensor Networks.
Shrivastava, N. 2006. Target tracking with binary proximity sensors: fundamental limits, minimal descriptions, and
algorithms. In in Proc. 4th Internat. Conf. on Embedded
Networked Sensor Systems, 251–264.
Zhong, Z.; Zhu, T.; Wang, D.; and He, T. 2009. Tracking
with unreliable node sequences. In INFOCOM, 1215–1223.
Figure 4: Impact of Model Parameter Alpha on the Performance of the TD-MRF
condition (i.e., the direction of the wind) changes often. The
algorithm can be simply modified to estimate wind condition every time step or every several time steps and then
use wind-move edges according to the estimation. The wind
condition and the edges between time step t and t + 1 can
be different from those between time step t + 1 and t + 2.
Through simulation, we observed that under heavy noise,
a precise wind-condition estimation requires multiple snapshots. It implies that if the wind condition changes fast, we
need to obtain more snapshots from the sensor network in a
given period of time. Unfortunately, this may deplete the energy source of the sensors quickly. One may need to ignore
the temporal connections and roll back to static inference
when wind changes fast and energy conservation is a main
concern.
5
Conclusion
When there is a large amount of noise in sensor detection
output, it is difficult to deduce the true situation in the area
monitored by the sensor network. We propose a TD-MRF
modeling framework and an inference algorithm to process
noise data and infer the true situation. The model enables
incorporation of spatial and temporal correlations in sensor
data to obtain a better detection and tracking performance.
We conducted a set of experiments to test the model and the
algorithm. Results show that our framework is effective. It
gives a much better deduction of the situation even when
the noise level is quite high. As a future work, we will investigate a more general model framework where the model
parameters can be learned from the data as well.
References
Ardo, H.; Astrom, K.; and Berthilsson, R. 2007. Real time
viterbi optimization of hidden markov models for multi target tracking. In Proceedings of the IEEE Workshop on Motion and Video Computing, 2.
Bapat, I.; Kulathumani, V.; and Arora, A. 2005. Reliable
estimation of influence fields for classification and tracking
in an unreliable sensor network. In In 24th IEEE Symposium
on Reliable Distributed Systems.
593