Direct Computation of Inverse Problems for Biomedical Imaging Isaac Harari Tel Aviv University
advertisement

Direct Computation of Inverse Problems for
Biomedical Imaging
Isaac Harari∗
Tel Aviv University
July 2011
∗
w/Uri Albocher, TAU; Assad A. Oberai & Yixiao Zhang, RPI; Paul E. Barbone & Carlos E. Rivas, BU
Motivation
Breast cancer study ’identifies tumourcausing enzyme’
— BBC News (2009)
Breast cancers are surrounded by stiffer,
more fibrous tissue.
These properties have helped doctors to
detect breast cancers.
Variations in mechanical properties can signify disease.
Nondestructive/noninvasive material characterization.
1
Inverse Problems
Typical solution procedure: iterative constrained optimization
Example: elastic modulus reconstruction
Additional
Info
Math
Model
Computer
Model
Measured
u m(x)
Yes
u(x)
u(x)=u m (x)?
µ(x)
Done!
No
Modulus
µ(x)
Update
µ(x)
Robust: accommodates partial data, noisy data. . .
2
Applications with Full-field Data
Shear-flexural test [Avril et al., 2008]
3
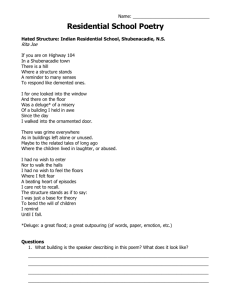
Aquifer management
Given measurements of hydraulic head H,
determine transmissivity T (∝ hyd. conductivity = permeability), where
100˚
99˚
98˚
GILLESPIE
TRAVIS
BLANCO
EXPLANATION
Ground-water-model area
Barton
Springs
LAKE TRAVIS
Active model area
Inactive model area
HAYS
Boundary of recharge zone (outcrop) (modified from Puente, 1978)
Boundary separating flow units (Maclay and Land,
1988, fig. 22, table 4)
560
Generalized direction of ground-water flow
30˚
6800
66 40
6 0
62
COMAL
0
60
Well in which water-level measurement made
KENDALL
Spring
BANDERA
REAL
San Marcos
Springs
CALDWELL
660
640
620
EDWARDS
CANYON
LAKE
Hueco Springs
it
low
BEXAR
ter
un
Comal Springs
nf
s
Ea
0
680
MEDINA
LAKE
76
S∂tH = ∇ · (T ∇H) + R
0
KERR
Water-level contour—Shows altitude at which water level
would have stood in tightly cased wells open to Edwards
aquifer. Dashed where inferred. Interval 20 feet. Datum is
NGVD 29 (Roberto Esquilin, Edwards Aquifer Authority,
written commun., 2004)
58
700
Here S is storativity
R is a source.
GUADALUPE
820
0
0 78 0
76
860
840
860
840
0
72
0
San Pedro Springs
it
0
w un
al flo
entr
th-c
Sou
it
88
San Antonio Springs
it
un
flow
tral
-cen
760 GA
900
74
72
h
Nort
A
IPP
KN P
Las Moras Springs
0
80
78
820
800
0
780
760
UVALDE
700
KINNEY
GONZALES
680
w un
ern flo
740
-south
ern
West
Leona Springs
MEDINA
29˚
MAVERICK
Approximate area
of Upper Cretaceous
volcanic activity
WILSON
[Lindgren et al., 2004]
ATASCOSA
0
ZAVALA
10
20
30
40 MILES
FRIO
4
Biomechanical imaging
Ultrasound provides movie of interior of deforming medium.1
Tissue mimicking phantom
Bmode ultrasound
1
T. Hall, Ultrasound Lab, U. Wisc.
Axial strain
5
Displ. & strain
6
Model selection
Soft tissue, starting point for inverse problem:
simplified isotropic, inhomogeneous, linear viscoelasticity.
Compressible or incompressible?
Easier to solve for compressible case.
Reconstructions based on compressible models become unstable in nearly
incompressible range [Barbone-Oberai, 2007].
Compressible model can lead to wrong solution of inverse problem.
=⇒ Incompressible
7
Outline
Formulation
Quasi-static Elasticity
• Model problem: plane stress
–
–
–
–
Strong form, compatibility.
Proposed approach: AWE
Well-posedness & convergence.
Numerical examples.
• Plane strain and three dimensions
Time-harmonic Viscoelasticity
• Complex adjoint weighted equations.
• Regularization.
• Computation.
8
Formulation
Eqn’s of motion, freq. ω
∇ · σ + ρω 2u = 0
u(x) displ.
σ(x) Cauchy stress
ρ dens. (const.)
Isotropic media (in mixed form,
p = −λǫii)
σij = −pδij + 2µǫij
p(x) press.
µ(x) shear modulus
ǫ(x) inf. strain
Forward prob., µ specified + bc’s, solve for u & p.
Inverse prob., u specified + ?, solve for µ (& p).
9
Quasi-static Elasticity
All quantities ∈ R
Incompressible plane stress
σij = 2µ (δij ǫkk + ǫij )
{z
}
|
Eij
Domain Ω ⊂ R2, w/boundary Γ.
Given measurement(s) of ǫij (x), x ∈ Ω:
Find unknown shear modulus µ(x) such that
∇ · (µE) = 0
10
Our approach:
Direct (non-iterative) solution of (2) advection-type equations.
Data st det(E) 6= 0 in Ω, avoid uniaxial stress.
Two equations for single unknown.
Overdetermined unless strains satisfy compatibility conditions.
Calibration condition on µ (shear modulus) for unique solution:
• Specified point value
• Specified mean value
Modulus dist. known in calibration region Ωcal ⊂ Ω.
11
Specified Point Problem
Given E(x) non-singular everywhere in Ω
∇ · (Eµ) = 0
in Ω
µ(x0) = µ0
x0 ∈ Ωcal, µ0 > 0 prescribed.
Re-write system as
∇µ + E−1(∇ · E)µ = 0
Assume:
• E is differentiable (displ’s are twice differentiable).
−1
• Compatibility: ∇ × E
∇·E =0
Solution [Barbone-Oberai, 2007].
12
Specified Mean Problem
Given E(x) non-singular everywhere in Ω
1
meas(Ωcal)
∇ · (Eµ) = 0 in Ω
Z
µ dΩ = µ̄
Ωcal
µ̄ > 0 prescribed.
The cont. ft’ns µpt & µmean are scalar multiples, e.g.
µpt(x) =
µ0
mean
µ
(x)
mean
µ
(x0)
13
Zero Mean Problem
Substitute
µ ← µ − µ̄
Given E(x) non-singular everywhere in Ω
∇ · (Eµ) = f in Ω
Z
µ dΩ = 0
Ωcal
Here
f = − (∇ · E) µ̄
14
Standard Variational Formulations
Function space
Z
1
V = v ∈ H (Ω) Ωcal
v dΩ = 0
Weak form (weighted residual):
Stability
Small variations in data can lead to large variations in solution.
Two-equation system
• Scalar test ft’n can’t enforce two eqn’s independently.
• Vector test ft’n leads to overconstrained, rectangular matrix.
15
Least-squares Variational Formulation
Standard formulation
∇ · (E w), ∇ · (E µ) = ∇ · (E w), f ,
∀w ∈ V
Robust and stable [Bochev-Choi, 2001].
Stability: depends on the data.
holds for sufficiently small ∇ · E.
Well-posed problem w/relatively weak assumptions.
Galerkin discretization: overly dissipative, negative norms [Bochev, 1999].
16
Proposed approach
Adjoint Weighted Equation for thermal conductivity reconstruction
[Barbone-Oberai-H., 2007].
AWE for linear elasticity: plane, 3d, anisotropy.
b(w, µ) = l(w),
∀w ∈ V
Incompressible plane stress
b(w, µ) =
E∇w, ∇ · (E µ)
l(w) =
E∇w, f
Weighted by “adjoint” operator (coincides w/LS for ∇ · E = 0).
Motivated by VMS stabilization, USFEM, NOPG.
∼ FOSLL∗ [Manteuffel-McCormick, 2001].
17
AWE Properties
Euler-Lagrange equations:
∇ · (E × PDE′s)
in Ω
n · E × PDE′s
on Γ
2nd-order elliptic equation for µ (assuming E2 > 0).
By construction, if µ is a sol’n of the strong form, then it is a sol’n of AWE.
18
Assumptions
• ∇ · E ∈ L2(Ω)
• The E-norm
kwkE = kE∇wk
is a norm on V.
kwkE ≤ C1 kwk1
• Generalized Poincaré inequality
k(∇ · E)wk2 ≤ CPE kE∇wk2
For stability (holds for sufficiently small ∇ · E, dep. on data).
CPE < 1
19
Well posedness
Uniqueness, by coercivity.
Equivalence between AWE and strong form:
• Recall, if µ is a sol’n of the strong form, then it is a sol’n of AWE.
• Reverse, by uniqueness (if strong form is well posed).
Existence, by Lax-Milgram w/coercivity.
Remark
Sol’n exists for E’s that violate compatibility condition.
=⇒ AWE less sensitive to noisy data than strong form.
20
Discretization
Galerkin fe approx.
µh ≈ µ
cont. piecewise poly’s (complete to order p).
Support def. by mesh partition of Ω, mesh size h.
Set of ft’ns V h ⊂ V
b(wh, µh) = l(wh),
Convergence, error
∀wh ∈ V h
e = µ − µh
Consistency
b(wh, e) = 0,
∀wh ∈ V h
Error estimate
kekE ≤ C hp
21
Numerical Results
Convergence study
x−y
2 + 0.2
E=
symm.
y−x
− 0.7
2
x−y
+ 1.2
2
Note
−0.3
0
−0.4
−0.5
−0.5
−0.6
εxx
−0.2
−0.7
−1
−0.8
−0.9
−1.5
1
∇ · E 6= 0
−1
1
Y axis
Exponentially varying solution
−1.1
0.5
0.5
0
0
X axis
ǫ11
µ = exp(2(x + y) )
22
Convergence study
Meshes (bilin. quads), unif. refin.: 2 × 2 −→ 256 × 256
2
10
AWE L2 norm
AWE H1 semi−norm
LS L2 norm
1
10
LS H1 semi−norm
0
Error
10
1
−1
10
2
1
−2
10
2
−3
10
−3
10
−2
−1
10
10
0
10
h
Similar studies on randomly distorted meshes (10%), nearly identical.
23
Circular Inclusions
Smooth circular inclusion in homo. background, 5:1 (max.) contrast.
“Measurement” (forward problem, tan. displ. bc’s):
Data computed on fine mesh & downsampled (∇ · E 6= 0).
1.1
1.2
1
0.9
0.8
0.8
εxy
1
0.6
0.7
0.4
0.6
0.2
1
0.5
1
0.5
0.4
0.5
0.3
Y axis
0
0
X axis
24
Reconstruction (smooth)
50 × 50 unif. mesh
1
0.9
0.8
AWE
LS
Exact
5
4.5
4.5
4
4
0.7
3.5
3.5
0.6
µ
3
0.5
2.5
0.4
0.3
2
0.2
1.5
0.1
3
2.5
2
1.5
1
1
0
0
0.2
0.4
0.6
0.8
1
0
0.5
1
Distance along diagonal
1.5
25
Stepped profile
Homo. circular inclusion in homo. background, 5:1 contrast.
“Measurement” (forward problem, tan. displ. bc’s):
Data computed on fine mesh & downsampled (∇ · E 6= 0).
1.3
1.2
1.5
1.1
1
1
εxy
0.9
0.8
0.5
0.7
0.6
0
1
0.5
1
0.5
Y axis
0.5
0
0
0.4
0.3
X axis
26
Reconstruction (stepped)
50 × 50 unif. mesh
5.5
1
4.5
0.9
0.8
4
0.7
AWE
LS
Exact
5
4.5
3.5
0.6
4
3.5
3
µ
0.5
2.5
0.4
0.3
2
0.2
1.5
0.1
3
2.5
2
1.5
1
1
0
0
0.2
0.4
0.6
0.8
1
0.5
0
0.5
1
Distance along diagonal
1.5
27
Estimate Stability
Reconstruction more difficult w/rough data.
Recall gen. Poincaré inequality
k(∇ · E)wk2 ≤ CPE kE∇wk2
For stability,
CPE
10
< 1.
stepped
smooth
9
8
Approx. E downsampled from 40×40.
Coeff. matrix of inverse prob. > 0 to
almost 4 (stepped) and 14 (smooth).
7
lower bound of CE
P
Lower bound on CPE from
alg. e-val. prob. on 20 × 20 mesh.
6
5
4
3
2
1
0
2
4
6
contrast
8
10
28
Gaussian white noise
0%
3%
1
10%
1
1
5
3.5
4.5
3
0.8
0.8
0.8
4
3
3.5
2.5
0.6
0.6
A
A’
2.5
A
2
0.4
0.6
3
A
A’
0.4
2
0.4
0.2
1.5
0.2
A’
2.5
2
1.5
0.2
1.5
1
1
0
0
0.2
0.4
0.6
0.8
1
0
1
0
3.5
0.2
0.4
0.6
0.8
0
1
0
4
Exact
AWE
0.4
0.6
0.8
1
3.5
Exact
AWE
3.5
3
0.2
Exact
AWE
3
3
2.5
2.5
2.5
2
2
2
1.5
1.5
1.5
1
0.5
0
1
1
0.2
0.4
0.6
0.8
1
0.5
0
0.2
0.4
0.6
0.8
1
0.5
0
0.2
0.4
0.6
0.8
1
29
Incompressible Plane Strain
Given measurement of ǫ(x), x ∈ Ω:
Find unknown µ(x) (& p(x) ) such that
−∇p + 2∇ · (µǫ) = 0
in Ω
Single loading requires large set of calibration data [Barbone-Bamber, 2002].
Consider measurements from two loading conditions ǫ1 & ǫ2 (lin. indep.).
4 1st-ord. PDE’s for 3 unknowns: µ, p1, & p2.
4 calibration conditions for µ & 2 conditions for 2 p’s = 6 total
[Barbone-Gokhale, 2004].
30
Calibration conditions
Illustration: two homogeneous deformations (ε1,2 = const.)
0 ε2
ε1
0
,
ǫ2 =
ǫ1 =
ε2 0
0 −ε1
2
µ = c1 + c2x + c3y + c4 x + y
Most gen. dist.
2
Recall, modulus dist. known in calibration region µ(x) = µ̄(x), x ∈ Ωcal
Modes suggest “moments”
Z
Ωcal
xµ dΩ =
Z
Ωcal
Z
xµ̄ dΩ,
Z
Ωcal
Z
µ dΩ =
Ωcal
yµ dΩ =
Ωcal
(x2 + y 2)µ dΩ =
Z
µ̄ dΩ
Ωcal
Z
y µ̄ dΩ
Ωcal
Z
(x2 + y 2)µ̄ dΩ
Ωcal
31
AWE Formulation
Given measurements ǫ1(x) & ǫ2(x), x ∈ Ω:
Find µ(x), (p1, & p2 ) satisfying
4
2
P
(ǫl∇w1, ∇ · (µǫl)) − 2 (ǫ1∇w1, ∇p1) − 2 (ǫ2∇w1, ∇p2) = 0
l=1
2 (∇w2, ∇ · (µǫ1))
2 (∇w3, ∇ · (µǫ2))
− (∇w2, ∇p1)
=0
−
(∇w3, ∇p2)
=0
Lagrange multipliers enforce calibration conditions.
Alternative: SVD.
32
Circular Inclusions
5:1 (max.) contrast
5
4
3
2
1
1
1
0.5
0.5
0
0
Loading conditions
33
Measurements 52 × 52
Shear
−0.5
1
ε
xy
1.5
yy
0
ε
Smooth
Compression
−1
0.5
−1.5
1
0
1
1
0.5
1
0.5
0.5
0
0
0
0
0
1.5
−0.5
xy
−1
ε
yy
1
ε
Stepped
0.5
0.5
−1.5
−2
1
0
1
1
0.5
0.5
0
0
1
0.5
0.5
0
0
34
Reconstruction (smooth 26 × 26)
Lagrange mult.
5.5
µ AWE
µ Exact
5
4.5
4
µ
3.5
3
2.5
2
1.5
1
0.5
0
0.5
1
1.5
Distance along diagonal
5
µ AWE
µ Exact
4.5
4
SVD
3.5
µ
3
2.5
2
1.5
1
0.5
Ωcal = Ω/12
0
0.5
1
1.5
Distance along diagonal
35
Reconstruction (stepped 26 × 26)
µ AWE
µ Exact
5
4.5
4
3.5
µ
Lagrange mult.
5.5
3
2.5
2
1.5
1
0.5
0
0.5
1
1.5
Distance along diagonal
5.5
µ AWE
µ Exact
5
4.5
3.5
µ
SVD
4
3
2.5
2
1.5
1
0.5
0
0.5
1
1.5
Distance along diagonal
36
Time-harmonic Viscoelasticity
Eqn’s of motion
∇ · (aµ) = f
Plane configurations: def. a & f .
E.g. anti-plane shear
a = ∇u
f
= −ρω 2u
Two measured fields ui, w/ai & fi, i = 1, 2.
37
Complex adjoint weighted equations
Recall AWE
b(w, µ) = l(w),
∀w ∈ V
Complex-conjugated AWE (CAWE)
b(w, µ) = (∇w, A∇µ + aµ)
l(w) = (∇w, f )
Here
A =
X
a∗i ⊗ ai
i
a =
X
a∗i ∇ · ai
i
f
=
X
a∗i fi
i
38
Poincaré ineq. =⇒
b(w, µ) bounded, coercive bilinear form &
l(w) bounded linear form
Lax-Milgram =⇒
CAWE solution exists and is unique.
39
Regularization
Recall, quasi-statics, sharp variations in modulus dist. =⇒
large strain grad. which violate stability condition.
In time-harmonic case violate stability even for smooth modulus when
kL > 1
(k 2 = ρω 2/µref ).
Total variation regularization [Rudin-Osher-Fatemi, 1992]
∇µ
b(w, µ) + α Re ∇w, p
|∇µ|2 + β 2
!
= l(w)
Non-linear problem.
40
Computation
Anti-plane shear.
Non-dimensionalize: scale ui w/uref
µ w/µref
x w/L.
Given ui, find µ
∇ · (µ∇ui) + k 2L2ui = 0,
i = 1, 2
Compute w/bilin. quad’s.
41
Synthetic data
Homo. rect. inclusion (2.5+0.35i) in homo. background (1+0.1i), kL = 30.
“Measurement” (forward problem, 2 pt. sources, PML [Turkel-Yefet, 1998]):
Data computed on 100 × 100 mesh & downsampled
Reconstruction in reduced domain to exclude sources.
42
Imag.
Real
Reconstruction (40 × 40)
43
Imag.
Real
Reconstruction w/TV (α = 100)
44
Imag.
Real
Reconstruction w/noise (3%, α = 1000)
45
Gelatin phantom, MR
2 cylindrical inclusions in homogeneous background.
MR measured displacement data, 300 Hz excitation2
Quadratic least-squares filter.
3
R.L. Ehman, Radiology, Mayo Clinic
46
Reconstruction (200 × 160)
α = 6 × 1010
7 × 1010
8 × 1010
47
Summary
Inverse problems with interior data:
• Broad applications.
• Well behaved.
• Require care.
AWE formulation:
• Alternative variational framework, weighted by “adjoint” operator.
• Analysis =⇒ AWE shares stability of LS.
• Good numerical performance (discontinuities?).
Current work: more gen. config’s (plane σ, noise, weights; 3d, etc.).
48
Background: Stabilized Methods
Abstract Dirichlet problem, L is a 2nd-ord. diff. op.
Lu = f
in Ω
u = 0
on Γ
Variational formulation: u, v ∈ V,
a(v, u) = (v, f )
a(v, u) = (v, Lu) = (L∗v, u)
C 0(Ω) Galerkin method: uh, v h ∈ V h ⊂ V,
a(v h, uh) = (v h, f )
Goal: high coarse-mesh accuracy for any L.
49
Best Approximation
Optimality in “energy” norm, ∀U h ∈ V h
h
h
a (e, e) ≤ a U − u, U − u
e = uh − u.
Laplacian
L = −∆
energy norm
a (v, v) ≡ (∇v, ∇v) H 1 semi-norm
h
h
h
h
a v , e = 0 ⇐⇒ ∇v , ∇u = ∇v , ∇u
Consistency
H 1 proj.
Good performance at
any mesh refinement.
Goal: best approximation in
H 1 semi-norm for any L.
50
Petrov-Galerkin Formulation
Optimal, but global [Givoli, 1988]: construct v̄ h ∈ V̄ h ⊂ V
h
a v̄ , u
h
h
= v̄ , f
L∗v̄ h = −∆v h
h
h
v̄,n = v,n
e = ∪Ωe
in Ω
on ∪ Γe
is H 1 optimal, but finding v̄ h is very hard.
NOPG [Barbone-H., 2001] Nearly opt. and local, change bc’s:
v̄ h = v h
on Γe
v̄ h − v h are bubbles, but not residual free.
Advection-diffusion Lu = −∇ · (κ∇u) + ∇ · (a u)
[Nesliturk-H., 2003]
51
Variational Multiscale Framework
VMS [Hughes, 1995]: Direct sum
Vh = VP ⊕ VE
uP ∈ V P, “coarse scales” (resolved) = std. fe ft’ns.
uE ∈ V E, “fine scales” (unresolved) = ???.
[Franca-Farhat, 1995], [Cipolla, 1999]:
linears ⊕ bubbles.
a(v P, uP) + (L∗v P, uE) = (v P, f )
a(v E, uP) + a(v E, uE) = (v E, f )
=⇒
uE = M E(LuP − f )
Eliminate uE
a(v P, uP) + (L∗v P, M ELuP) = (v P, f ) + (L∗v P, M Ef )
52
Adjoint stabilized methods
Local approx.,
τ ≈ M E, USFEM [Franca-Frey-Hughes, 1992]
P
∗ P
a(v P, uP) + (L∗v P, τ LuP)Ω
e = (v , f ) + (L v , τ f )Ω
e
Residual-based method [Oberai-Pinsky, 2000].
Advection-diffusion
Lu = −∇ · (κ∇u) + ∇ · (a u)
Performs well in computation, recent review [Franca-Hauke-Masud, 2006].
τ =?,
e.g., [Catabriga-Coutinho-Tezduyar, 2006].
NOPG =⇒ discard Galerkin in advective limit
(L∗v, Lu) = (L∗v, f )
Novel variational formulation for pure advection [Oberai-Barbone-H., 2007].
53
Sufficient conditions
• Denote eigenvalues of E2(x) as γ1(x) ≤ γ2(x)
0 < γ0 ≤ γ1(x) ≤ γ2(x) ≤ γ∞
i.e. E2 > 0.
=⇒ E-norm is equivalent to H 1 semi-norm | · |1
γ0|w|1 ≤ kwkE ≤ γ∞|w|1
•
|∇ · E(x)| ≤ q0
=⇒ bound by std. Poincaré const.
CPE ≤ CP q02/γ0
54
AWE stability
Coercivity of b(·, ·)
b(w, w) =
=
≥
≥
=
>0
E∇w, ∇ · (E w)
2
kE∇wk + E∇w, (∇ · E) w
1
ǫ
kwk2E − k(∇ · E)wk2,
∀ǫ > 0
1−
2
2ǫ
1
ǫ
1 − − CPE kwk2E
2 2ǫ
q q 1 − CPE kwk2E
select ǫ = CPE
for CPE < 1.
Depends on the data (holds for sufficiently small ∇ · E).
55
Convergence
Error
e = µ − µh
Consistency
b(wh, e) = 0,
Interpolation error
ei = µ − µi
i
i
h
e=µ
−
µ
+
µ
−
µ
| {z } | {z }
ei
From consistency
∀wh ∈ V h
eh
0 = b(wh, ei + eh)
= b(wh, ei) + b(wh, eh)
56
Thus
Select
wh = eh
b(wh, eh) = b(wh, ei) ,
h i b(e , e ) = b(e , e )
h
b(·, ·) is continuous
Coercivity
∀wh ∈ V h
h
h i b(e , e ) ≤ C2 kehkE keikE
C3 kehk2E ≤ b(eh, eh)
Combining
C3 kehkE ≤ C2 keikE
57
Error estimate
kekE
h
i
=
e +e E
h
i
≤
e E + e E
(tri. ineq.)
i
≤ (1 + C2/C3) e E
i
≤ (1 + C2/C3) C1 e 1
≤ C hp
(interp. est.)
Recall, h is mesh size
p is order of (complete) poly.
58
Implementation: Specified mean
Proper variational settings in terms of ft’ns w/specified (zero) mean µ̄.
Specified mean ≡ global constraint: computationally cumbersome
impairs efficiency
Specified pt. is simple, but may degrade performance.
(Similar to pressure Poisson eq’n for incomp. flow [Bochev-Lehoucq, 2005].)
Continuous problems are equivalent
cal
meas(Ω
) µ̄ pt
mean
R
µ
(x) =
µ (x)
pt dΩ
µ
Ωcal
Discrete eqn’s generally are not.
59
In AWE optimal performance is retained:
For any w̃h, construct
wh(x) = w̃h(x) −
1
meas(Ωcal)
Z
w̃h dΩ
∈ Vh
Ωcal
Recall AWE formulation
b(wh, uh) = l(wh)
Equation expressed in terms of ∇wh
b(w̃h, uh) = b(wh, uh)
l(w̃h) = l(wh)
60
Discrete AWE eqn’s are formally equivalent.
Simple and “correct” procedure:
Compute AWE sol’n for specified pt. problem and rescale.
Does not hold for LS (req. more elaborate procedure).
Accuracy?
61